1. Introduction
Cyber-physical systems (CPSs) have gained significant importance due to the rapid advancement of modern industrial processes. They are responsible for ensuring the uninterrupted functioning of critical processes such as intelligent vehicles [
1], health-care systems [
2], and smart grids [
3], on which people rely. CPSs integrate control, computation, communication, cloud, and cognition in a comprehensive manner, making them an interdisciplinary field. Because of the connection of CPSs to wireless networks for remote monitoring and control, the networked fault diagnosis theory for CPSs has received significant attention, e.g., Refs. [
4,
5]. The objective of fault diagnosis in CPSs is to detect, estimate, and accommodate the faults of systems by using the system information transmitted through the wireless channel. Resource limitations of fault diagnosis for CPSs in communication and energy are among the main reasons for pursuing event-triggered fault diagnosis, which effectively reduces the amount of information exchanged. The core concept in event-triggered data transmission revolves around determining if the information ought to be transmitted via the intended communication channel. Control and estimation theory is one of the first fields to explore the use of event-triggered transmission schemes [
6,
7,
8,
9].
Fault diagnosis and fault tolerance aim to improve the reliability of industrial systems in the presence of faults. Fault diagnosis detects, isolates, and identifies faults occurring in sensors, actuators, and system components by monitoring the system and analyzing sensor measurements. Fault tolerance accommodates the diagnosed faults to achieve fault-tolerant operation by reconfiguring control parameters to compensate for the effect of faults. Significant progress has been made during the past few decades [
10,
11,
12,
13,
14,
15]. In particular, nonlinear ultrasonic system identification has provided a novel approach based on ultrasound propagation in media to extract sensitive features for fault diagnosis [
16,
17,
18]. By monitoring key nonlinear parameters, analyzing signal features and studying information entropy changes, it enables the detection, localization, and diagnosis of various faults in structures and machinery, offering a promising tool for health monitoring.
Recently, the rise of event-triggered control and estimation solved several solutions on fault diagnosis [
19,
20,
21]. These studies have primarily focused on co-designing event-triggered fault diagnosis systems and communication schemes for CPSs subject to various network-induced constraints. For instance, the event-triggered fault detection and isolation problems were addressed for a class of discrete-time linear CPSs in Ref. [
19], where three kinds of energy norm indices were introduced for the event-triggered residual generator to achieve the restraint of disturbances and the sensitivity of faults. The research presented in Ref. [
20] investigated the joint design of an event-triggered fault estimator and a data-forwarding scheme for stochastic CPSs that are subject to sensor nonlinearities, and packet dropouts. In Ref. [
21], the problem of simultaneous unknown input and state estimation for discrete time-varying CPSs aimed to maintain upper bounds on the estimation error covariances.
Due to the inherent openness of CPSs, cyber attack issues cannot be ignored during wireless data transmission, particularly when studying the networked fault diagnosis algorithms of CPSs. According to the types of attacks, Ref. [
22] categorizes external attack behaviors into denial of service attacks and false data injection attacks (FDIAs). Denial of service attacks obstruct the exchange of information, including sensor measurement data or control inputs, while FDIAs focus on sending malicious information to controllers or estimators during data transmission. It is worth mentioning that FDIAs are regarded as the most dangerous external threat behaviors [
22,
23], as the attackers introduce false data into the communication channels to impair or even ruin the performance of the controlled systems. As a result, the design of secure estimation strategies for CPSs is both important and challenging work, as highlighted in Refs. [
24,
25,
26]. However, with regard to fault diagnosis issues in CPSs, only a limited number of studies have been reported in the existing literature. For example, Ref. [
27] exploited the passive fault-tolerant approach to address FDIAs and stochastic nonlinearities issues. A synthesized design for Gaussian stochastic systems was investigated in Ref. [
28], which combines fault-detection filters and fault estimators to reduce the effects of FDIAs.
All the aforementioned techniques assume that the states of CPSs are not constrained. Nonetheless, due to physical device limitations, state saturation characteristics are often present in various CPSs. For instance, moving robots are subject to position and steering angle constraints, while digital filters are limited by finite word-length formats. State saturations indeed occur in practical applications, rendering the assumption of unconstrained states to not always be valid. More recently, the trend on this topic has shifted toward the development of control and estimation for state-saturated systems (see Refs. [
27,
29,
30]) and the references therein for more information). Unfortunately, the issue of event-triggered fault estimation and tolerance for state-saturated CPSs has not been explored, especially when FDIAs occur randomly. The main difficulties in this paper are as follows:
(1) How to establish a fault estimator for partial state-saturated CPSs to reconstruct both state and actuator faults using an event-triggered transmission scheme?
(2) How to develop an event-triggered control strategy for partial state-saturated CPSs to both compensate for the effect of actuator fault and defend against FDIAs launched by malicious adversaries?
(3) How to reduce the computation complexity of designing the constructed event-triggered fault estimator and the corresponding fault-tolerant controller for CPSs affected by state saturations and FDIAs?
To address these difficulties, the problem of event-triggered fault estimation and tolerance is studied for discrete-time stochastic CPSs where the partial state saturations occur with given amplitudes, and FDIAs are assumed to occur sporadically, following a stochastic variable that adheres to the Bernoulli distribution, characterized by known conditional probabilities. First, an event-triggered fault estimator is established to estimate the states and actuator faults of the CPSs. A sufficient condition is derived where the dynamics of state and fault estimation errors achieve the exponentially stability in the mean-squared sense. The proposed event-triggered transmission scheme also ensures efficient usage of the communication resources. Second, the estimated states and fault signals are utilized to develop the fault-tolerant compensation controller, which can stabilize the considered CPSs. Finally, experimental assessments on a DC motor platform with wireless nodes validate the theoretical results. The main contributions lie in three aspects:
(1) The proposed strategy for fault reconstruction and fault tolerance can effectively compensate for actuator faults, reduce sensor communication resources, and defend against FDIAs;
(2) An energy norm is introduced to constrain the impact of undesirable elements, encompassing exogenous disturbances, fault information, and false data transmitted by adversaries;
(3) Compared to existing methods [
25,
27], the proposed fault estimator and fault-tolerant controller based on reduced-order subsystems are simpler. Moreover, the desired event condition, estimator, and controller gains are obtained by solving standard linear matrix inequalities. Thus, it is convenient to calculate their gain matrices.
Nomenclature: and represent the sets of real and natural numbers, respectively; denotes the sets of real-valued matrices, while is an abbreviation for ; denotes the set of positive definite matrix. If , we simply express . Matrix norm , where indicates the maximum eigenvalue; : Euclidean norm of vector y; : minimum eigenvalue of matrix Y. A diagonal matrix is denoted by . In symmetric block matrices, “∗” is employed as a shorthand for terms induced by symmetry. signifies the domain of square integrable vectors, whereas I denotes an identity matrix with appropriate dimensions. Additionally, and correspond to the mathematical expectation and the probability of event z, respectively.
2. System Formulation
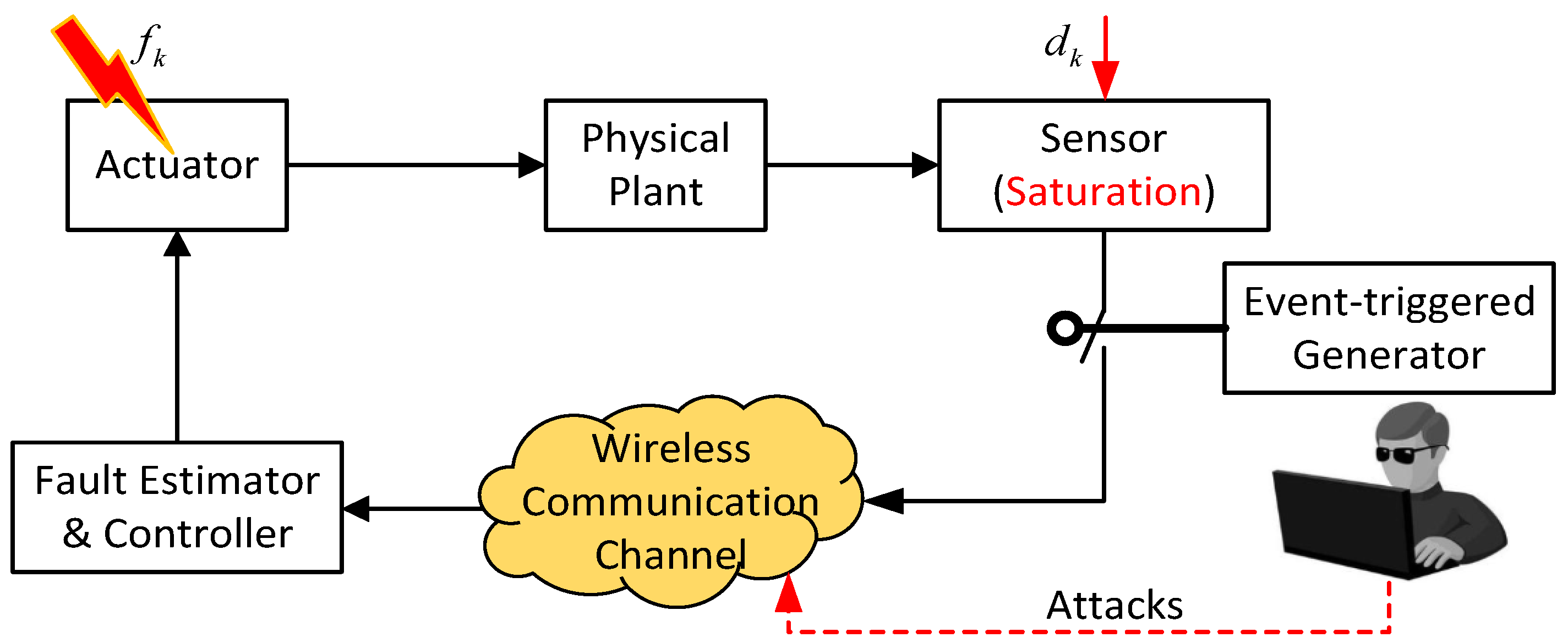
The framework of fault estimation and tolerance considered in this paper is shown in
Figure 1. The CPS is described by discrete-time stochastic dynamics
with the time index
k, system state
, control input
, ideal measurement
, the unknown but bounded disturbances
, and actuator fault
, which belong to
. A zero-mean Gaussian noise sequence
satisfies
. The signals sent by the adversaries for the FDIAs are generated as
where
are also the unknown but bounded signals satisfying
. It is observed that the term
in (
2) has a similar form to the actuator fault
and the external disturbance
. Consequently, it is difficult to distinguish them by using various detectors, which makes the estimator design problem more challenging.
In practical engineering, successful FDIAs occur randomly in implementation because of the physical constraints that the attackers have to face, as highlighted in Ref. [
24]. Such constraints include limited-energy devices, limited-bandwidth transmission channels, and randomly fluctuating channel conditions. It is essential to take these constraints into account when developing a realistic deception attack model. Based on the discussions in the Introduction, we can rewrite the actual measurement sent by remote fault estimator as
where the stochastic scalar variable
is a Bernoulli distributed sequence with
The problem of full-state saturations is a special case of system nonlinearities in physical systems. The partial state saturation phenomenon is more general than the full-state saturation in engineering practices. We mainly focus on discrete stochastic systems with partial state saturations in the present study. Now, we decompose the system (
1) as
where the states of saturation-free and saturation are
and
, respectively. The saturation function
is denoted as
with
, where
and
are the
element of the vector
and the saturation level, respectively. Here, sign(·) is the signum function. By revising Definition 1 in [
31], we can obtain the following definition:
Definition 1. A nonlinear function : belongs to a sector area if for some real diagonal matrices , where a positive-definite matrix .
Using Definition 1 and the standard loop transformation technique, supposing that there exist diagonal matrices
and
such that
; and then, the saturated nonlinear function
in system (
5) can be separated into linear and nonlinear components:
where the nonlinear part satisfies
and a positive-definite matrix
.
As system (
5) encompasses stochastic variables
and
, it constitutes a stochastic parameter system. Consequently, it is necessary to present the notion of mean-squared stochastic stability.
Definition 2. A discrete stochastic process is considered exponentially mean-squared stable if constants and exist, satisfying the following conditions: 3. An Event-Triggered Fault Estimator
In this section, an event-triggered fault estimator will be established so that the states and faults of the considered systems (
5) can be reconstructed. Subsequently, the mean-squared stability analysis of the designed estimator will be explicitly provided. To this end, we temporarily ignore the control input
in the system Equation (
5) for the convenience of discussion. An event-triggered fault estimator has the following form:
where the notation of “
” indicates the estimate,
are the estimation gains with appropriate dimensions to be designed, and
denotes the last released measurement information that is transmitted from sensor to remote estimator. In order to conserve computational and communicative resources, an event-triggered transmission approach is utilized to determine if the measurement should be transmitted. Thus, measurement information is only required to be sent at transmission times
with
. The measurement information of event-triggered fault estimator can further be described as
, where
and
.
The state estimation error dynamics of the saturated-free subsystem can be obtained by subtracting (
5) from (
11)
where
,
and
.
Through mathematical manipulations, the state estimation error dynamics of the saturated subsystem can be calculated as follows
Further, it is easy to show that
where the fault difference is defined as
.
Considering the above discussions, our objective is to design the fault estimator (
11) with the corresponding event condition for the system (
5) so that the error dynamics system is exponentially mean-squared stable, and the energy norm performance constraint is satisfied. In other words, we aim to design an estimator such that:
(1) The estimation error dynamics associated with the saturation-free state, saturated state, and fault exhibit exponential mean-squared stability;
(2) Given the zero-initial constraint, the output estimation error
adheres to the subsequent criteria:
for all nonzero
and a prescribed attenuation level
, where
and
.
Remark 1. The design problem (1) ensures exponential stability of , , and in the mean-squared sense. The performance function (15) ensures that the gain between and remains below . Furthermore, in Equation (15) encompasses exogenous disturbances, fault signals, and false information transmitted by adversaries. Minimizing their influences is essential for the effectiveness of the fault estimator. Theorem 1. Consider the partial state-saturated system (5) subject to random FDIAs. Given , for a specified positive scalar , if positive definite symmetric matrices , a positive scalar β and matrices exist, which fulfill the subsequent constraint: Then, the proposed event-triggered fault estimator (11) can be implemented such that the state and fault estimation errors are exponentially mean-squared stable, using the following event condition: Estimator gains can be determined by , , and . Moreover, the output estimation error satisfies for all nonzero , where and .
Proof. Consider the following Lyapunov function:
where
,
,
,
, and
. Using the estimation error dynamics (
12)–(
14), it can be formulated that
Taking Equations (
8), (
9), and (
32) into consideration, we have
where
,
and
. Based on condition (
16), without considering the influence of
, the following inequality can be deduced:
where
,
and
. From (
36), we can further obtain
where
. Therefore, according to Definition 1, it can be verified from the results in Refs. [
6,
8] that the exponentially mean-squared stability of both state estimation error and fault estimation error is ensured. Next, consider system (
5) with
. We introduce the following energy-norm index:
Again, the use of (
16) implies that
, and thereby
. With the zero initial condition, it is straightforward to deduce Equation (
15). □
As mentioned in the Introduction, when sensors obtain measurement information, the event-triggered transmission scheme is responsible for deciding whether to send it to the remote fault estimator or not. Let represent the sensor’s decision to transmit measurement information or not . From Theorem 1, it is evident that the case of sending measurement information is not included in the proof of Theorem 1. For comprehensiveness, the design presented in Theorem 1 can be readily generalized to the scenario where , as articulated in the subsequent corollary.
Corollary 1. Consider that and Theorem 1 holds. If there are positive definite symmetric matrices , a positive scalar β, and matrices that satisfy the condition (16), then the estimator (11) can ensure that the estimation errors in the state and fault are exponentially mean-squared stable when . Thus, estimator gains can be determined by , , and . Output estimation error satisfies that for all nonzero . Proof. The proof of Corollary 1 is similar to the proof of Theorem 1. Hence, the derivation of Corollary 1 is omitted in the proof. □
Remark 2. It should be noted that the fault difference term is not neglected. Because of the occurrence of the time-varying faults in many practical systems, its effect is minimized for estimation performance by employing the technique in the proof of Theorem 1. This implies that the designed fault estimator (11) can robustly estimate time-varying faults. By assuming that in (16), the desired fault estimator can also estimate constant actuator faults occurring in the considered system. Consequently, the desired fault estimator can achieve the reconstruction of both constant and time-varying actuator faults in the mean-squared sense. Remark 3. The introduced event condition (32) can be referred to as the send-on-delta decision rule [32], where the difference between the current and last-transmitted information is utilized. Compared to the existing event-triggered method in Ref. [9], the proposed communication scheme does not rely on a copy of the remote estimator, which can further reduce the computational burden. 5. Experimental Studies
The effectiveness of the proposed approach is demonstrated on a platform that represents a networked CPS over a shared wireless channel. The estimation task aims to estimate both state and fault under the proposed event-triggered transmission scheme, while the control task focuses on compensating for the fault effect on the partial state-saturated system. The performance of the proposed method is compared with that of the classical fault estimator and fault-tolerant controller.
5.1. Experimental Setup
Based on the theoretical results we derived, a complete algorithm of the event-triggered remote fault estimation and accommodation are summarized in Algorithm 1.
Note that wireless transceiver modules typically consume more energy than computation modules in most industrial applications. Hence, it is worthwhile to develop an energy-efficient transmission scheme for wireless nodes. As can be seen from Algorithm 1, the designed estimation strategy at each time instant is divided into two parts. If the condition is satisfied, then the state estimation and fault estimation steps can use instead of the current measurement data. Such an operation allows the wireless transceiver modules to not send information to the remote receiver at the current time instant so as to prolong the battery life of the wireless sensor nodes. In contrast, if the condition is satisfied, the state estimation and fault estimation steps will use the current measurement information to ensure the reconstruction accuracy of state and fault.
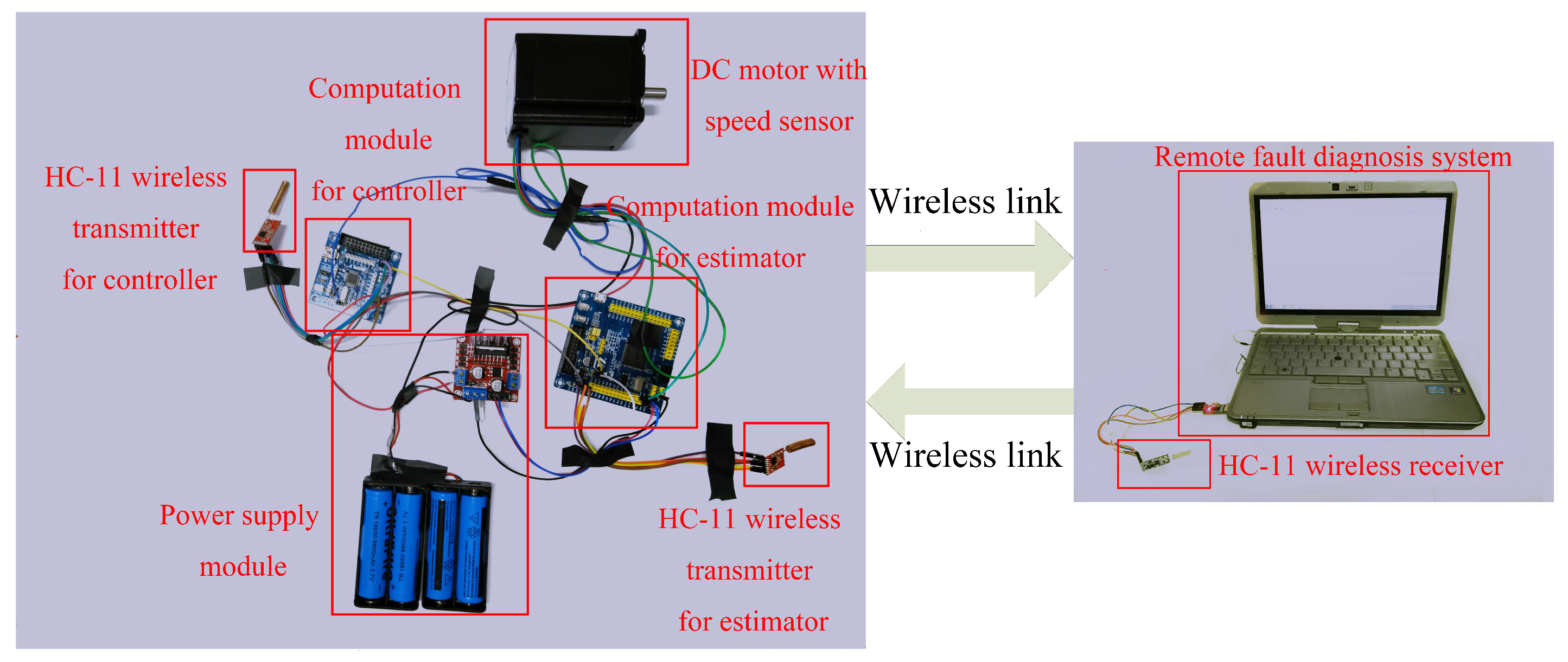
In order to verify the effectiveness of Algorithm 1, this study employs the experimental platform of the DC motor constructed in
Figure 2. A speed sensor and a type of wireless nodes are positioned to construct a wireless network for transmitting motor speed information from the sensor side to a remote fault diagnosis system. The estimated information is then transmitted to a local wireless node, enabling the remote fault diagnosis system to accommodate fault effects. The wireless node comprises the following components: (1) the wireless transceiver module HC-11 can realize the mutual conversion between serial port data and radio frequency signals, which also has the characteristics of low power consumption, small size, and radio frequency stability. (2) The computation module STM32L162ZD is a high-performance microcontroller unit. (3) The power supply module converts AC power to DC power and provides stable working power for wireless modules. The wireless transceiver module HC-11 is responsible for transmitting the motor speed signal collected by the speed sensor to the remote fault diagnosis system. The computation module STM32L162ZD determines when to transmit the data packet according to the proposed event-triggered decision rule. Once the event condition is triggered, the computation module sends the measurement information to the HC-11 wireless transceiver module. The power supply module provides a stable working voltage for the wireless transceiver module and the computation module to ensure their normal operation. Through the mutual cooperation of the above modules, the fault diagnosis system can calculate the fault and state values according to the designed estimator, and send the feedback control signals to the wireless node for the DC motor to achieve fault tolerance.
| Algorithm 1: Recursive algorithm of the event-triggered remote fault estimation and fault-tolerant control. |
Set the initial conditions , , , and ; - 1:
At each time instant k, the following steps are executed: - 2:
ifthen - 3:
, the current measurement information cannot be sent out to achieve energy-saving; - 4:
State estimation step: - 5:
; - 6:
; - 7:
; - 8:
Fault estimation step: - 9:
; - 10:
else - 11:
, the remote estimator can obtain current measurement information to ensure robust estimation; - 12:
State estimation step: - 13:
; - 14:
; - 15:
; - 16:
Fault estimation step: - 17:
; - 18:
end if - 19:
Fault-tolerant control step: - 20:
;
|
5.2. DC Motor: Description and Modeling
The DC motor’s dynamics model is modeled in Ref. [
33] as
where coefficient
is the rotor speed,
is the rotor inertia,
is the back electromotive force constant,
is the viscous friction coefficient,
is the torque constant, and
is the motor armature voltage input. The current, inductance, and resistance of the motor armature are separately expressed as
,
and
. Furthermore,
and
represent the first-order derivative of
and
, respectively. In this experiment, we employ a 100 W DC motor that has a rated current of 3 A and a rated voltage of 24 V. Taking into account the main technical specifications of the DC motor, the discretized model of system (
55) with a sampling time of 0.01 s is formulated as follows
The second state of rotor speed is subject to a saturation constraint, and the saturation function
is obtained as follows
In this setup, the saturation value
is set as 0.02,
and
. The probability of FDIAs is assumed as
. The exogenous disturbance
is selected as
, and the attack signal
is set as
. Other matrices in system (
1) are parameterized as follows
Now, the original system (
1) can be transformed into the following two subsystems:
and
Choosing
,
and
, the event-triggered fault estimator and fault-tolerant controller are constructed as follows
5.3. Experimental Results
To demonstrate the effectiveness of the proposed methods, a series of experiments are presented in this subsection.
Experiment 1: Effectiveness and Robustness of the State Estimation
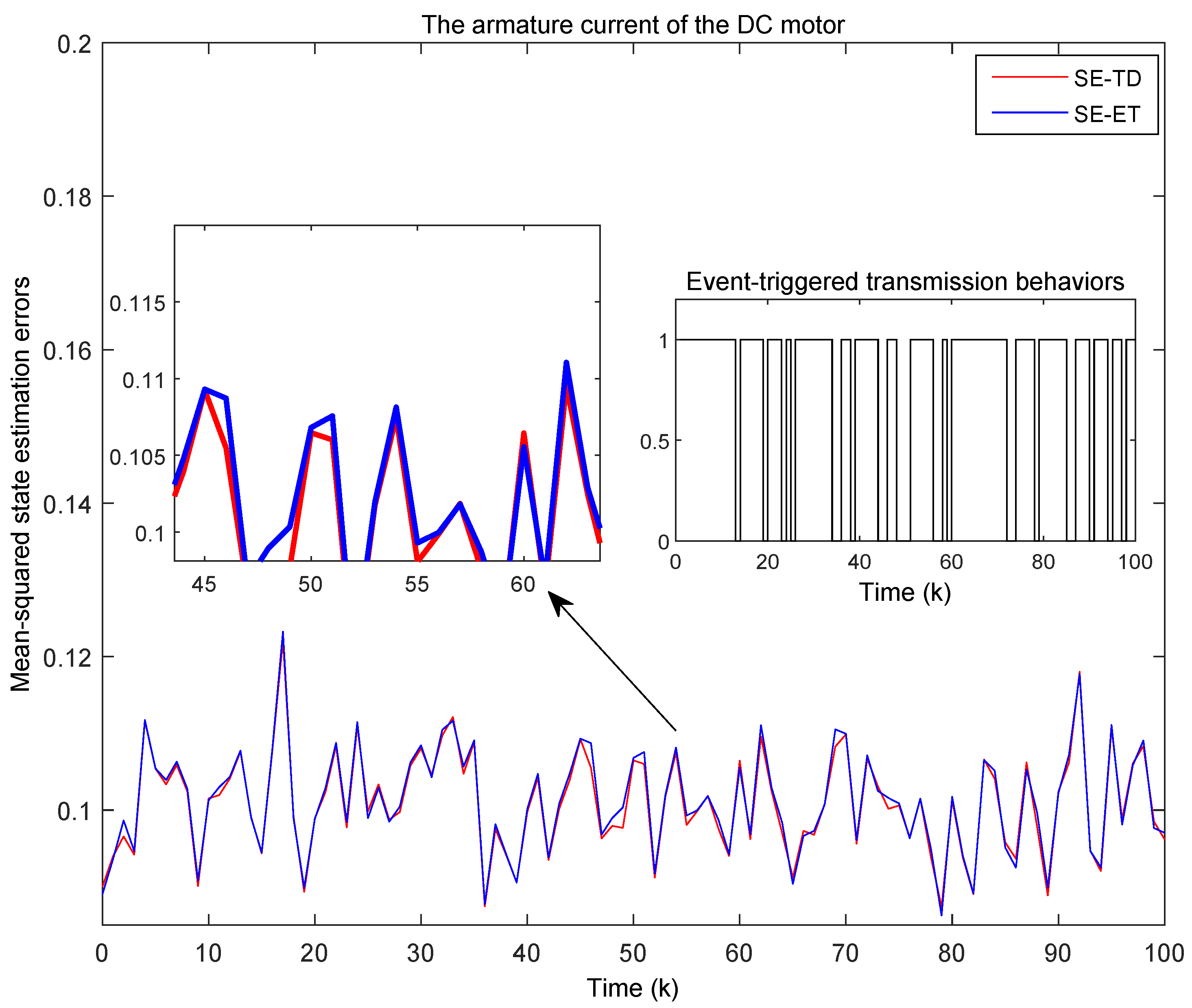
The first experiment aims to assess the effectiveness of state estimation by implementing the proposed event-triggered data transmission scheme. The mean-squared state estimation error trajectories are shown in
Figure 3 and
Figure 4 to compare the designed event-triggered state estimator (SE-ET) and the estimator using time-driven data transmission scheme (SE-TD). The corresponding transmission behaviors are also illustrated in the above figures. As shown in
Figure 3 and
Figure 4, the state estimation trajectories of the two approaches, namely SE-ET and SE-TD, almost overlap with the increase of time. Evidently, the state estimation accuracy is not affected by the event-triggered data transmission scheme. However, it should be noted that in the particular case where the triggering condition parameter
takes the value of zero, the mean-squared state estimation error achieved by SE-ET is marginally greater than that calculated by SE-TD, which is also consistent with the result of Theorem 1.
In order to verify the security of the designed event-triggered estimator, the mean-squared state estimation errors are examined subject to the different attack probabilities.
Figure 5 displays the curves on the mean-squared state estimation error of system state 1 corresponding to increased
. It can be observed from
Figure 5 that the mean-squared state estimation error shows a steady upward trend with the increase of
. Meanwhile, it is apparent that a higher frequency of attacks leads to a slight deterioration in the state estimation performance. The first experiment demonstrates that the proposed state estimator can achieve a satisfactory estimation performance using an event-triggered data transmission scheme.
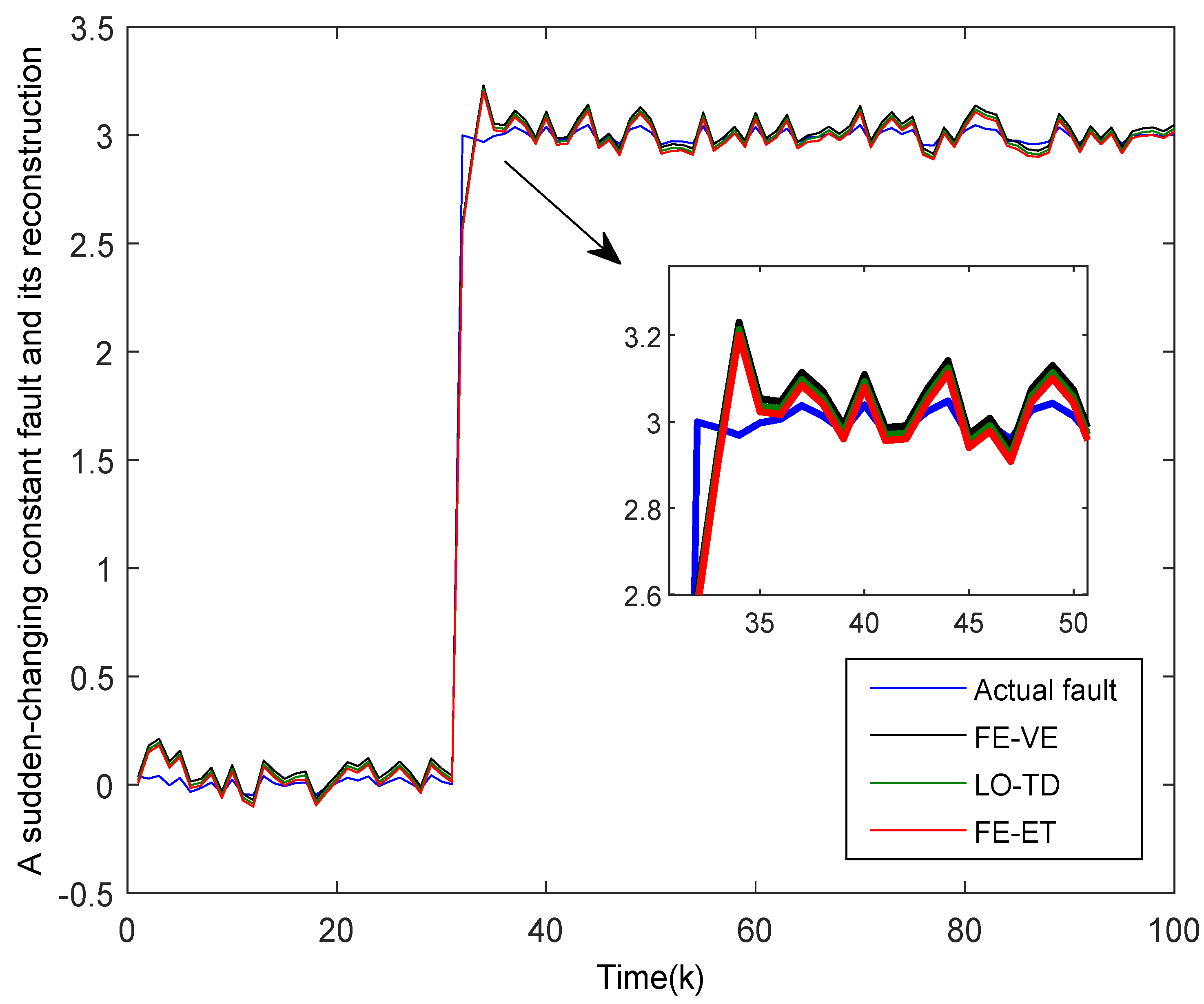
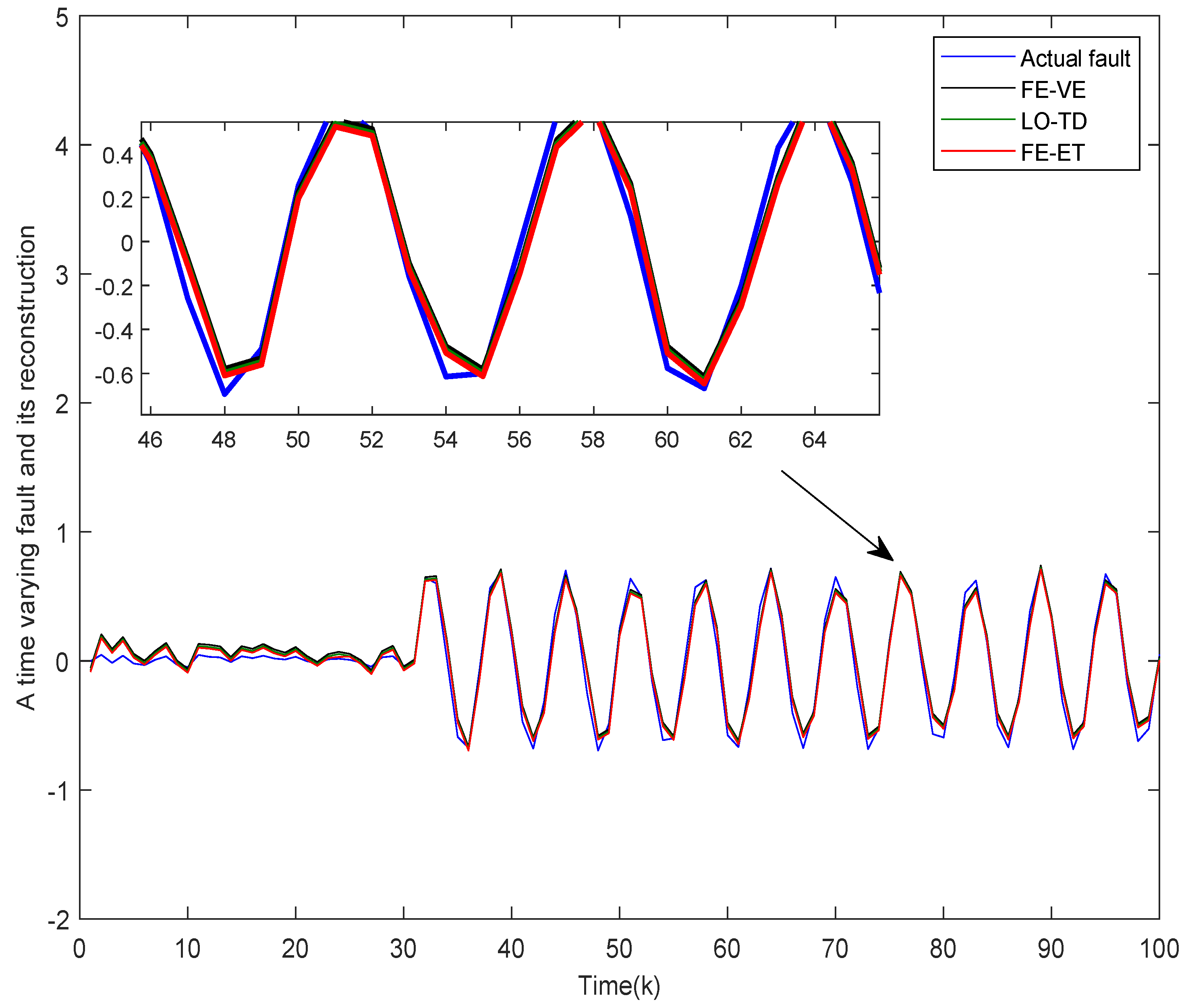
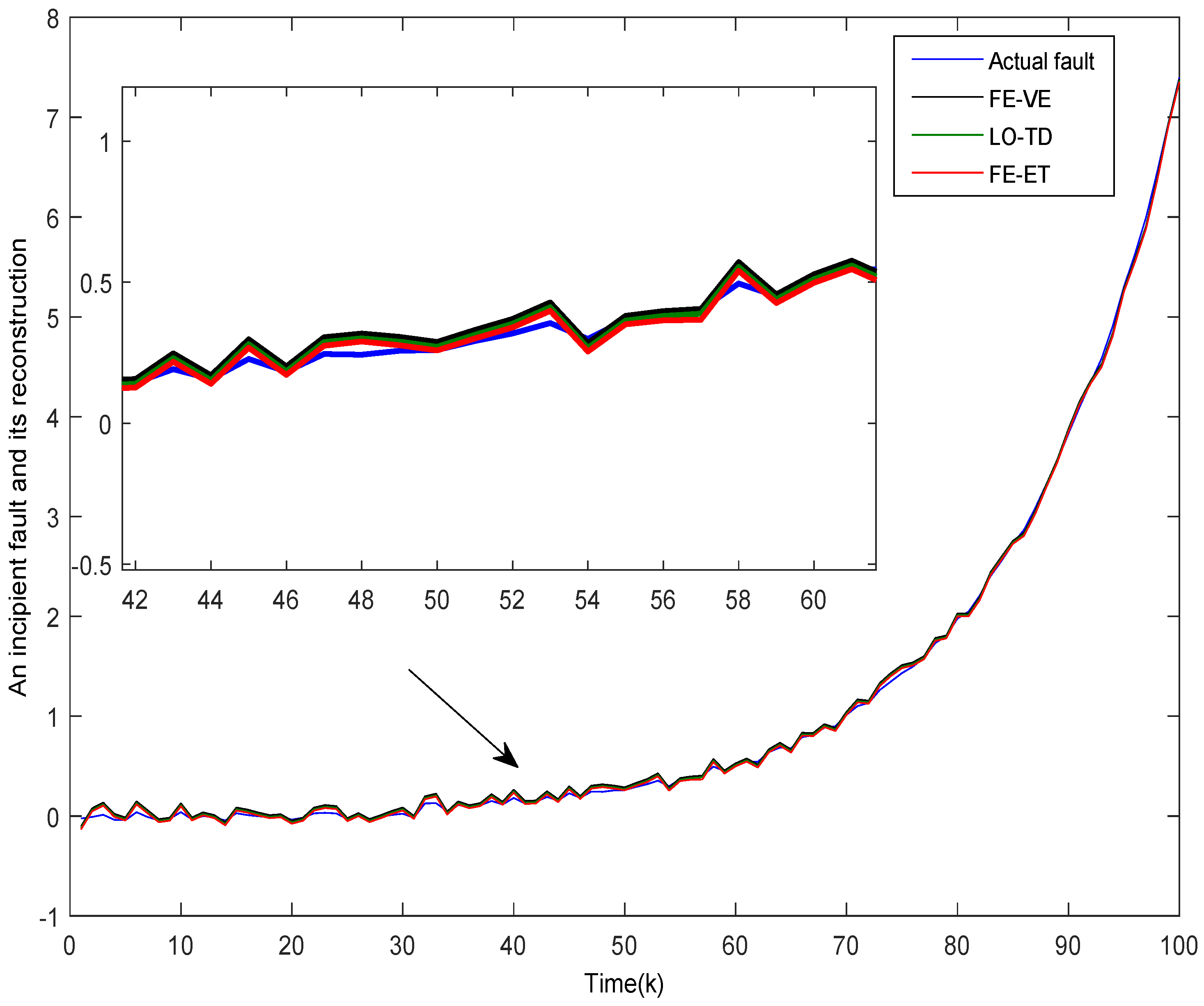
Experiment 2: Effectiveness and Robustness of Fault Estimation
Here, three fault scenarios are considered as follows:
A suddenly changing constant fault
Finally, an incipient fault
By using the proposed event-triggered fault estimator (FE-ET) in (
61),
Figure 6,
Figure 7 and
Figure 8 illustrate the actual and reconstructed signals of the suddenly changing constant fault, the time-varying fault, and the incipient fault, respectively. For comparison, the reconstructed fault signals using the time-driven learning observer (LO-TD) and the variance-constrained event-triggered fault estimator (VE-FE) borrowed from Refs. [
28,
34] are also depicted in
Figure 6,
Figure 7 and
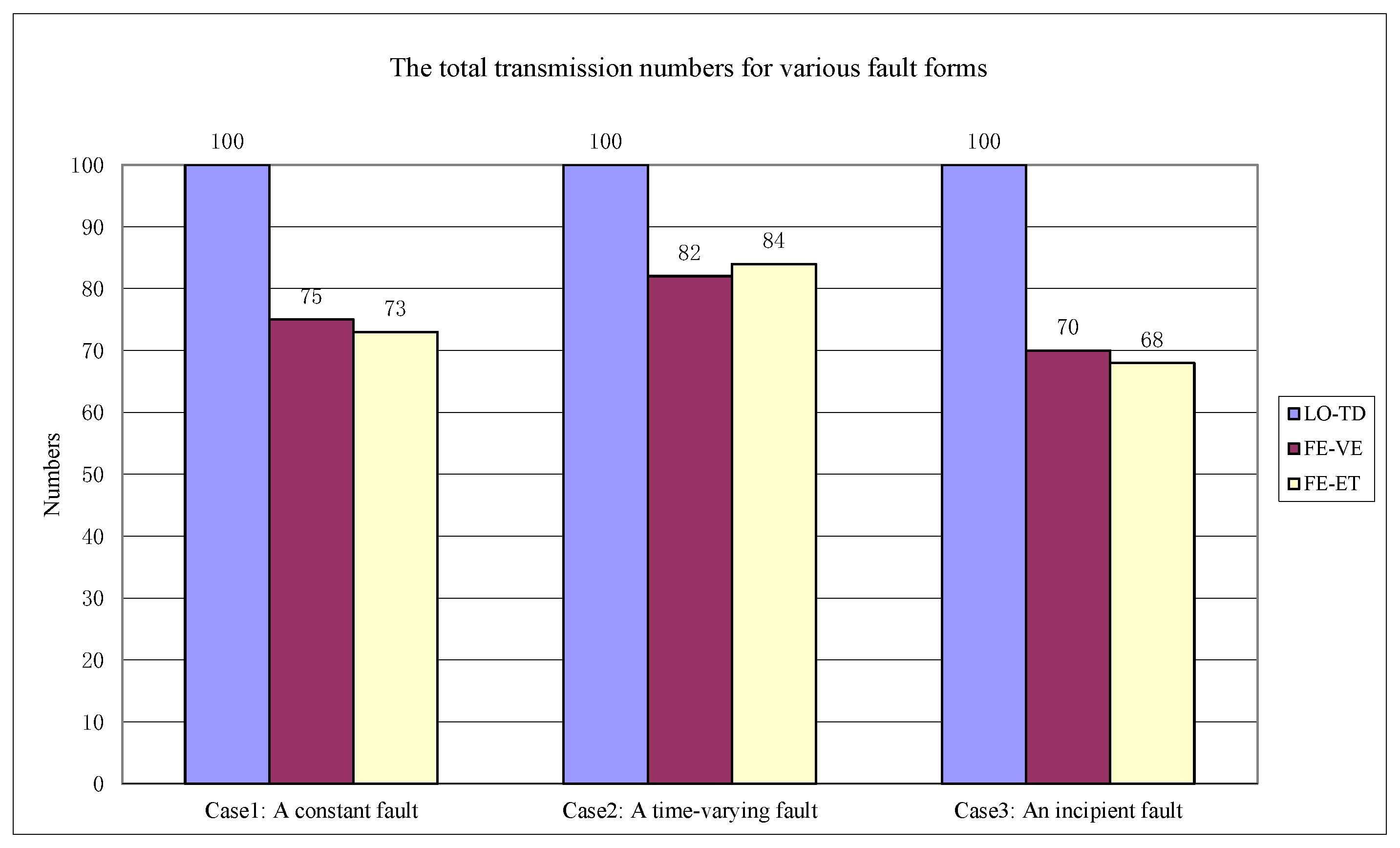
Figure 8. Compared with VE-FE, FE-ET designed using Theorem 1 not only offers superior rapidity of fault reconstruction but also achieves more accurate reconstruction of the various actuator fault scenarios. It can also be observed that both FE-ET and LO-TD demonstrate comparable rapidity and accuracy in fault reconstruction. However, the LO-TD algorithm shown in
Figure 9 requires measurement information collected by wireless nodes at each time step to ensure accurate fault estimation. This can lead to a large amount of unnecessary data transmission in a fixed sampling interval, limiting the applicability of the LO-TD algorithm, especially for the considered CPSs in this study. In contrast, the advantage of FE-ET is the ability to adjust the data transmission interval to reduce the working time of wireless nodes and prolong the battery life. As a result, the proposed FE-ET algorithm can better meet the requirements of CPSs.
Furthermore, the total transmission numbers for the time-varying fault case in
Figure 9 are relatively greater than for the other two fault cases. This is because the time-varying fault is characterized by high frequency, i.e., the upper bound of
is greater than the upper bounds of the other two faults. As clearly evidenced in
Figure 7, the designed FE-ET is unaffected by the time-varying fault feature. This further validates the designed event-triggered scheme, which is based on the result of Theorem 1. Its benefit is that data transmission occurs when the system state changes significantly or in emergency situations so that critical information cannot be missed.
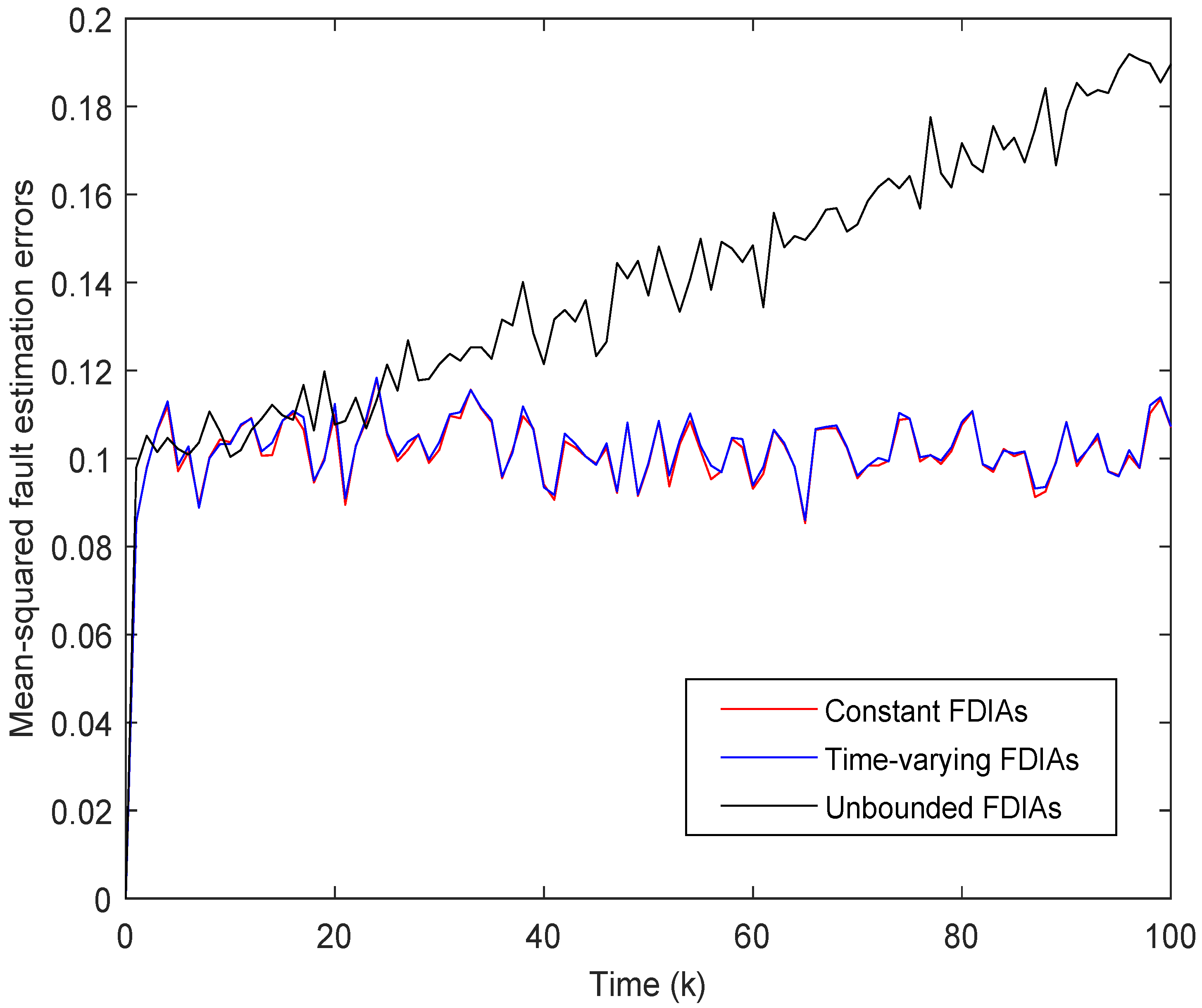
As illustrated in Experiment 1, different probabilities for FDIAs can lead to the different state estimation performance. In this experiment, the fault estimation performance is evaluated subject to different false information
sent by attackers. Constant false information, time-varying false information, and unbounded false information are respectively created as
,
and
. The mean-squared fault estimation error curves are shown in
Figure 10 with different deception attacks. As shown in
Figure 10, the designed FE-ET demonstrates robustness against constant and time-varying false data injection launched by attackers. Under these two types of FDIAs, the fault estimation error can still converge to a small bound, indicating accurate fault reconstruction. This validates the robustness of FE-ET against certain levels of false data injection. Unfortunately, FE-ET loses its effectiveness in the face of unbounded false information. When the false information increases exponentially without any bound, the fault estimation error amplifies drastically, This renders FE-ET unable to accurately estimate fault, implying that the proposed FE-ET cannot cope with unbounded false information.
Experiment 3: Effectiveness and Robustness of Fault Tolerance
The final experiment evaluates the effectiveness of fault compensation based on the reconstructed time-varying fault in
Figure 7. The system state responses under the fault-tolerant controller are shown in
Figure 11 and
Figure 12. The state responses using the estimated fault information perform well. It is clear that the fault estimator-based fault tolerant control strategy can effectively compensate for the impact of actuator faults on system performance. Similar to Experiment 1, the mean-squared state errors are examined in
Figure 13 with different attack probabilities to ensure the security of the designed fault tolerant controller. Obviously, the mean-squared state errors rise slightly as the attack probability increases continuously.
All experiments demonstrate that the proposed fault estimator and fault tolerant controller can achieve satisfactory performance using the event-triggered transmission scheme. They show robustness against constant and time-varying false information, which are common FDIAs. Specifically, Experiment 1 verifies that the proposed estimator obtains accurate state estimation. Experiment 2 proves that the designed estimator accomplishes rapid and precise fault reconstruction for various fault scenarios. Experiment 3 indicates that the fault tolerant controller using the estimated information can effectively compensate for actuator faults. However, it should be noted that unbounded false information, which represents excessive FDIAs, has slightly negative impacts on the performance of the proposed algorithm. That is to say, the proposed fault estimator-based fault tolerance demonstrates effectiveness and robustness against FDIAs by implementing the event-triggered data transmission scheme in CPSs.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}












