Abstract
This paper investigates a novel robust adaptive dynamic surface control scheme based on the barrier Lyapunov function (BLF), online composite learning, disturbance observer, and improved saturation function. It is mainly designed for a class of skid-to-turn (STT) interceptor integrated guidance and control (IGC) design problems under multi-source uncertainties, state constraints, and input saturation. The serial-parallel estimation model used in this study estimates the system states and provides “critic” information for the neural network and disturbance observer; then, these three are combined to realize online composite learning of the multiple uncertainties of the system and improve the interception accuracy. In addition, the state and input constraints are resolved by adopting the BLF and the improved saturation function, while the design of the auxiliary system ensures stability. Finally, a series of simulation results show that the proposed IGC scheme with a direct-hit intercept strategy achieves a satisfactory effect, demonstrating the validity and robustness of the scheme.
1. Introduction
As proposed in [1], the conventional design framework of separating the guidance subsystem and control subsystem possesses many advantages, such as being beneficial to stability analysis and engineering implementation, which makes it extremely widely used. However, under the background of a separate study of guidance and control loops, this framework also gives rise to several serious drawbacks that reduce the adjustability and robustness of missiles [2]. What follows is a failure to take full advantage of the missile’s overall effectiveness. Therefore, it is necessary to put forward an integrated guidance and control (IGC) scheme that is different from the above design framework and can overcome the preceding defects [3].
As a type of control framework with better overall performance than the conventional one, the guidance loop and the control loop is designed as a whole, making the guidance and control circuits operate synergistically. It is worth noting that the guidance and control synthesis of interceptors, as a challenging task, has become a hotspot research area of current technology [4]. In recent decades, numerous advanced control algorithms for IGC have been proposed, including model predictive control [5], sliding mode control [6,7], trajectory linearization control [8], and active disturbance rejection control [9]. To be more specific, the unique strict feedback form of the IGC model makes it suitable to control the system using the classic backstep method. To address the issue that the explosion terms inevitably appear in the classic backstep method, a novel design framework based on dynamic surface control (DSC) is provided [10]. The feasible non-singular terminal dynamic surface control for the IGC system is investigated in [11], which considers the terminal impact angular constraint and multiple disturbances comprehensively. In [12], a novel IGC method of the fuzzy adaptive dynamic surface is proposed for different maneuvering targets by introducing the fuzzy adaptive technique into the dynamic surface-based control framework. Meanwhile, different constraints and types of uncertain perturbations are considered in this study. In brief, various technologies based on DSC have been widely utilized in national defense and military industries.
There are multiple uncertainties and all types of constraints in actual systems, which need to be further investigated [13,14,15]. Plenty of achievements have been achieved in the research on systems with uncertain disturbances. Although the future course of action of the target in [16], as a type of uncertainty, cannot be predicted, the effect of the target maneuver can be counteracted by utilizing adaptive control techniques. Meanwhile, many control algorithms have been reported based on adaptive control [17], DSC [18,19], command filtered control [20], sliding mode control [21,22], barrier Lyapunov function (BLF) [23,24], and a fixed-time differentiator [25] for the constrained variables of IGC system. In [26], a three-dimensional integrated guidance and control law is developed, which relies on the advantage of dynamic surface control and extended state observer techniques to address input saturation and actuator failure. Both the studies in [26] and [27] are based on dynamic surface and extended state observer techniques, but the hyperbolic tangent function and auxiliary system in [27] are introduced to sort out the problem caused by input saturation and impact angle constrained. In addition, by combining numerous methods including backstepping, command filter, sliding mode control (SMC), and super twisting extended state observer (STESO), [28] proposes a control scheme with superior interception performance to solve the IGC problem of a 6-DOFs interceptor. By exploiting the relationships between the virtual commands of the constrained states and the tracking errors, the solution investigated in [29] can be employed in an IGC system with multi-constraints.
Although a lot of achievements have been achieved, the problems of multi-uncertainties and state constraints in the design of IGC have not been systematically solved. Motivated by the above research, a novel controller is investigated in this paper for interceptor IGC with multi-source uncertainties, state constraint, and input saturation. Our study mainly performs the following valuable work.
- As elaborated in the paper, this study proposes a novel adaptive dynamic surface control framework based on online composite learning and the BLF principle for the IGC by considering multiple uncertainties and the overload constraint;
- Different from previous studies in which the learning law is designed only by tracking errors, the serial-parallel estimation model established in this study estimates the system state and provides “critic” information for the neural network (NN) and disturbance observer that approximates the system uncertainties. Then, these three are combined to realize online composite learning of the multiple uncertainties of the system and improve interception accuracy;
- Aiming at the state constraint of the interceptor, the application of the improved saturation function and BLF can restrict the specific state to a certain range, while the design of the auxiliary system guarantees the system stability.
The rest of this paper is organized as follows. Section 2.1 presents the IGC model of the skid-to-turn (STT) missiles with state constraint, input saturation, and multi-source uncertainties. Section 2.2 introduces the intelligent approximation scheme. Section 3 designs a novel adaptive dynamic surface online composite learning IGC algorithm. Section 4 analyzes the stability of the proposed algorithm. Section 5 verifies the effectiveness and robustness of the proposed algorithm through nonlinear simulation. Finally, the conclusion of this study is given in Section 6.
2. Preliminaries
2.1. IGC Model
The longitudinal dynamic model of STT interceptor ignoring gravity is generalized below [30]:
where denotes the pitch angle rate of the missile, , , , , , and represent the pitch angle, attack angle, flight-path angle, mass, normal acceleration, and velocity of the missile respectively. and are the pitching moment and moment of inertia around the pitch axis. In addition, aerodynamic forces and can be expressed as [2]:
where .
The pitch moment can be obtained as:
where , , , , , , , , and are the aerodynamic coefficients. It is important for us to note that can be treated as a time constant in our study according to [31].
As shown in Figure 1, and denote the missile and the target, respectively, and the remaining definitions are presented in Table 1.
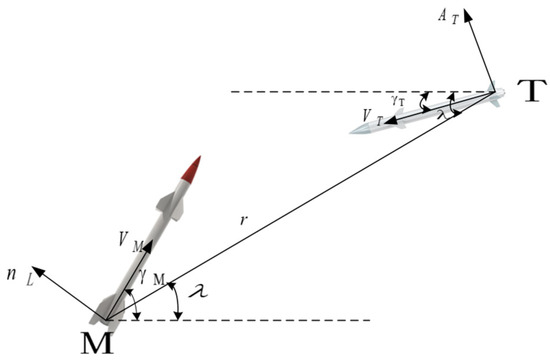
Figure 1.
Missile–target planar intercept geometry diagram.

Table 1.
Nomenclature.
Thus, the missile–target plane interception kinematics can be obtained as:
To ensure a direct hit, the following intercept strategy is selected for our study [31].
where is a designed scalar, and the interception strategy is defined as follows:
Then a direct-hit intercept for the missile can be achieved as , and the proof of effectiveness for Equation (5) can be found in [32].
By substituting (1), (2), (3), and (4) into (6), the IGC model for missiles can be described as follows [2]:
By defining , , and
The above model (7) can be converted into a strict-feedback form as follows:
where and are the input and output of the system, respectively. denotes the state vector, . In engineering practice, there are two challenging problems. On the one hand, due to the limitation of the missile’s maneuvering ability, its normal acceleration will be restricted, i.e., the normal acceleration satisfies . Considering , there exists
where is a known positive constant.
On the other hand, due to the physical constraints of the actuator, input saturation is inevitable in the control input of the system. Thus, the control input saturation can be described via the improved saturation function as:
where , . represents the maximum value of . is a positive constant to be designed. Obviously, the improved saturation function in our study is both continuous and differentiable when .
Invoking (11) into (8), the IGC system can be rewritten as:
where , .
For the IGC system (12), some reasonable assumptions are made as follows.
Assumption 1.
The uncertainty in the integrated design and its differentiation are bounded, i.e., , , where and are positive scalars.
Assumption 2.
Due to the measurement errors of the missile instrument, the continuous functions , , and can be considered unknown nonlinear uncertainty terms.
Lemma 1
[33]. For any , the following inequality always holds.
Remark 1.
Assumption 1 is often seen in the design of disturbance observer-based controllers [34].
Remark 2.
Technically, a direct-hit intercept for the missile can be achieved if the relative distance between the missile and the target along the line of sight reaches some sufficiently small value . Therefore, the range satisfies during the guidance process.
The control objective of this study is to construct a novel IGC scheme to ensure that the interception strategy can converge to the neighborhood of zero and achieve direct hit intercept under the conditions of multiple uncertainties and constraints.
2.2. Intelligent Approximation Scheme
The following expression is employed to approximate the nonlinear uncertainties in the system.
where is the variable space, and is the input. Denotes as a weight vector that can be updated online. There exists an optimal weight vector satisfying , and . In other words, denotes the supremum value of the approximation error , and the former is an arbitrarily small positive constant.
As an element of the radial basis function NN, is defined as:
where and are the center and the variance of the ith basis function.
3. The Design of Adaptive Composite Learning IGC Scheme
In this section, we design the control input so that the interception strategy converges to the neighborhood of zero in the presence of unknown target maneuver, missile normal acceleration constraint, and missile actuator saturation. Combined with Equations (7) and (12), it is more appropriate to adopt a three-loop control structure to complete the integrated controller design. The control structure diagram of the integrated guidance and control design is shown in Figure 2. The outer loop is designed to drive to the neighborhood of zero using the normal acceleration command as a virtual control input. The intermediate loop is used to make the actual normal acceleration track the normal acceleration command , using the pitch angle rate command as a virtual control input. Similarly, the inner loop is used to make the actual pitch rate track pitch rate command , using the elevator deflection as the control input.
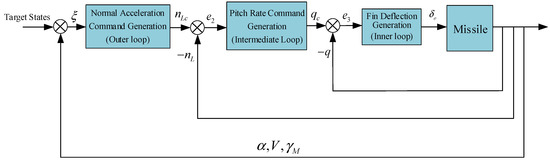
Figure 2.
The control structure diagram of IGC design.
- Outer Loop
Define , where is a designable parameter. As mentioned above, for the dynamics equation of in the IGC system (12), the estimation of is completed through NN.
where . denotes the optical weight vector. , as the approximation error of NN, satisfies .
From Assumption 2, meets the following requirements:
where and are unknown positive constants.
The first error surface is defined as , and then the nominal virtual control is constructed as:
where and are the user-defined parameters, and is the auxiliary system to be designed. and represent the estimated values of and , respectively.
At this point, a first-order filter is introduced into the system, which meets the following conditions.
where is the filter parameter, and the error signal of the filter (16) is presented as:
Differentiating with respect to time,
The actual virtual control can be generated through the following saturation function.
where denotes the maximum magnitude of , is a positive constant to be designed, and , .
Additionally, some variables are defined as:
Differentiating with respect to time and invoking (13), (15), (17), and (20), then the derivative of is obtained as:
where , .
To analyze and compensate for the effects caused by the introduced saturation function, the auxiliary system is constructed as follows:
where is a scalar.
The prediction error is designed as:
Inspired by the serial-parallel estimation model (SPEM), , as the predicted value of , is constructed as:
where is a design scalar, and .
The first composite intelligent learning law of NN is updated in the following form:
As shown below, the disturbance observer is used to cope with the uncertainty of .
where is a positive parameter to be designed, and is an auxiliary variable.
Substituting (27) into (26), then the derivative of is obtained as:
Considering the Lyapunov function as:
Substituting (24) into (23) yields, then the derivative of prediction error is constructed below:
Define , and then:
Differentiating with respect to time and invoking (21), (22), (25), (28), and (31), is calculated as:
The following facts should be considered:
where , .
According to the above inequalities, the derivative of can be given by:
where .
- B.
- Intermediate Loop
Define , where is a designable parameter. As mentioned above, for the dynamics equation of in IGC system (12), is estimated through NN.
where denotes the optical weight vector. , as the approximation error of NN, satisfies .
The second error surface can be obtained from (20), and then the nominal virtual control is constructed as:
where is a constant to be designed, and represents the estimate value of .
At this point, a first-order filter is introduced into the system, which meets the following conditions.
where is the filter parameter and the error signal of the filter (42) is presented as:
Its dynamic satisfies:
The third error surface is designed as . Invoking (41), (43), and (44), the derivative of can be given by:
where .
The prediction error is defined as:
Inspired by SPEM, , as the predicted value of , is constructed as:
where is a positive scalar to be designed, and .
The second composite intelligent learning law of NN is updated in a novel form, which fuses tracking error with prediction error.
Considering the barrier Lyapunov function as:
A specified compact set is defined as:
Substituting (47) into (46) yields, then the derivative of prediction error is constructed as:
Define , and then:
Differentiating with respect to time when and invoking (43), (44), (45), (48), and (52), the derivative of is calculated by:
The following facts should be considered:
According to the above inequalities, the derivative of can be given by:
where .
- C.
- Inner Loop
Define , where is a designable parameter. As mentioned above, for the dynamics equation of in the IGC system (12), is estimated through NN.
where denotes the optical weight vector. , as the approximation error of NN, satisfies .
The virtual control is constructed as:
where and are the user-defined parameters, and is the auxiliary system to be designed. represents the estimate value of .
Invoking (60) and (61), the derivative of can be further obtained as:
where , .
To analyze and compensate for the effects caused by the introduced saturation function, the auxiliary system is constructed as follows:
where is a scalar.
The prediction error is designed as:
Inspired by the SPEM, , as the predicted value of , is constructed as:
where is a positive scalar to be designed, and .
The third learning law of NN is updated in the following form:
Considering the Lyapunov function as:
Substituting (65) into (64) yields, the derivative of is computed as:
Define , and then:
Differentiating with respect to time and invoking (62), (63), (66), and (69), is calculated as:
The following facts should be considered:
According to the above inequalities, the derivative of can be given by:
where .
As you can see, a novel robust adaptive dynamic surface IGC scheme based on the serial-parallel estimation model, neural networks, and the disturbance observer is proposed in Section 3. The recursive design details of the scheme can be summarized in Figure 3. To be specific, the serial-parallel estimation model estimates the system states and provides “critic” information for the neural network and disturbance observer; then, these three are combined to realize online composite learning of the multiple uncertainties of the system and improve the interception accuracy. In addition, the state and input constraints are resolved by adopting the BLF and the improved saturation function.
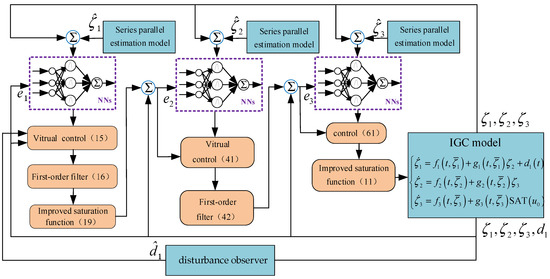
Figure 3.
The recursive design details of the scheme proposed in Section 3.
4. Stability Analysis
The Lyapunov function is chosen as:
Differentiating with respect to time and invoking (39), (59), and (75), can be represented as:
where .
Obviously, differentiating and with respect to time, there exists as:
where and are positive continuous functions.
A specified compact set is designed as:
where . Then, it can be concluded from (78) and (79) that the continuous functions and have maximum values within the scope of set , i.e.,
The appropriate parameters are selected as follows:
where represents a constant.
Theorem 1.
Consider the IGC system (12) under Assumption 1 with multiple uncertainties and actuator saturation, the controller (61), and NN learning laws (25), (48), (66) with parameters satisfying (81). If , the following properties hold:
- The output of the system can converge to a neighborhood of zero;
- All signals such as , , , , , , , , , , and are uniformly ultimately bounded;
- The constraint of the state variable will not be violated.
When , inequality (77) can be rewritten in the following form if the design parameters are selected as inequation (81).
Invoking (82) and Lemma 1, is calculated as:
That is:
can be received from (84) when and , i.e., if , then always holds for . In other words, is an invariant set.
By solving the inequality (84), we have:
Substituting (29) into (85) yields, the following expression can be obtained.
According to (86), can be acquired when , i.e., is uniformly ultimately bounded. Therefore, by choosing appropriate design parameters, can be arbitrarily small and can converge to a certain neighborhood of zero.
Invoking (49) and (85), we have:
Similarly, it can be obtained from Equation (88) that is uniformly ultimately bounded.
In addition, it can be concluded that the rest of signals such as , , , , , , , and in the closed-loop system are uniformly ultimately bounded.
According to inequation (88), always holds, and can be obtained from the definition of saturation function (19). Then,
According to Equation (89), for any , there is always . Thus, the state constraint of will not be violated.
The proof is completed.
5. Simulation Study
In this section, two simulation situations for the terminal guidance phase of a surface-to-air missile are taken into account to verify the effectiveness and robustness of the proposed control scheme. The simulations are aimed at the missile intercepts heading-on target.
5.1. Simulation Parameters
The setting of the missile’s inherent parameters includes , , , , and . The velocity of the missile is assumed to be constant during the terminal guidance phase, so it is defined as . The remaining initial trim conditions of the missile and the target can be found in Table 2. Similarly, the constraints of normal acceleration and elevator deflection of the missile are listed in Table 3. Motivated by [31], the aerodynamic coefficients of the missile are represented as:
Table 2.
The initial conditions of the missile and the target.
Table 3.
The constraints of acceleration and input saturation.
The initial range along the LOS between the missile and the target is ; the LOS angle is . The initial position of the missile and the target are given as: , , , and .
5.2. Simulation Results
5.2.1. Effectiveness Verification
To evaluate the effectiveness and superiority of the adaptive composite learning integrated guidance and control (ACLIGC) scheme proposed in our study, it is compared with the conventional backstepping integrated guidance and control (CBIGC) algorithm in [34]. For convenience, the two methods are denoted as ACLIGC and CBIGC respectively.
In this section, the target maneuver acceleration is given as in scenario 1. The parameters of the controller and filters are chosen as: , , , , , , , and . The parameters associated with online composite learning are set as: , , , and .
Figure 4, Figure 5, Figure 6, Figure 7 and Figure 8 show the simulation results when the maneuvering acceleration of the target is constant. It can be seen that the trajectories of the missile and target and the and coordinates of the missile and target are presented in Figure 4.
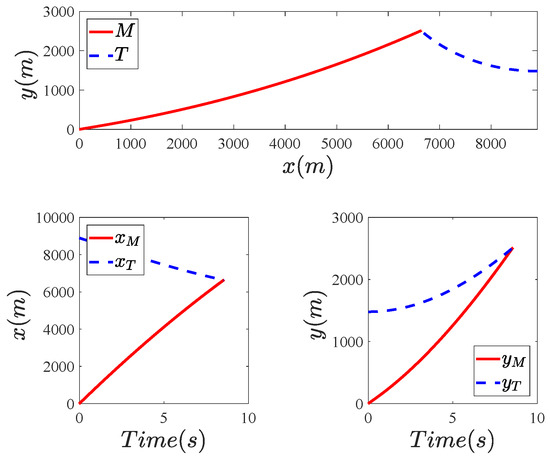
Figure 4.
The trajectories of the missile and target and x and y coordinates of the missile and target in scenario 1.
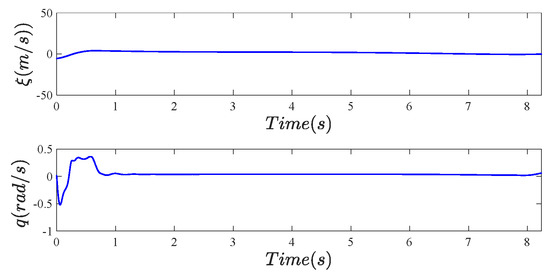
Figure 5.
The time responses of the intercept strategy ξ and pitch angle rate q in scenario 1.
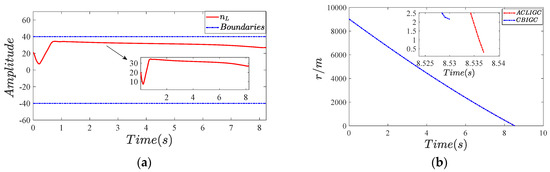
Figure 6.
(a) The time responses of normal acceleration in scenario 1; (b) the time response of range along the LOS in scenario 1.
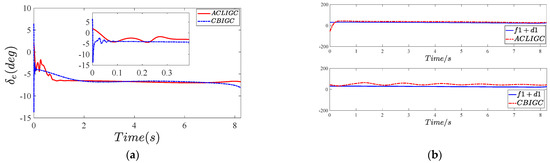
Figure 7.
(a) The time responses of elevator deflection in scenario 1; (b) ACLIGC and CBIGC to estimate in scenario 1.
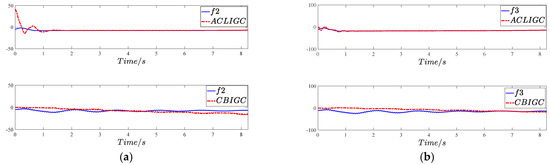
Figure 8.
(a) ACLIGC and CBIGC to estimate in scenario 1; (b) ACLIGC and CBIGC to estimate in scenario 1.
The trajectories of state variables for the IGC system such as intercept strategy ξ and pitch angle rate q are illustrated in Figure 5. It can be seen from Table 3 and Figure 6a that nL always maintains in the constrained area. The final miss distances of different methods are shown in Table 4, and the time response of range along the LOS is presented in Figure 6b. Table 4 and Figure 6b indicate that the ACLIGC proposed in our study has a smaller final miss distance compared with another value.
Table 4.
The final miss distance in various schemes.
As shown in Figure 7a, the actuator saturation problem can be solved via both CBIGC and ACLIGC, while the proposed ACLIGC can achieve better performance, with a smaller elevator deflection amplitude and smoother time responses. As can be seen from Figure 7b and Figure 8, compared with the traditional backstepping-based adaptive learning approach in [35], the online composite learning algorithm proposed in this paper achieves higher accuracy in estimating the system multi-source uncertainties.
5.2.2. Robustness Verification
In scenario 2, the target maneuver acceleration is changed to a time-varying form to verify the robustness of the proposed ACLIGC.
A series of satisfactory results are shown in Figure 9, Figure 10, Figure 11, Figure 12 and Figure 13 when the maneuvering acceleration of the target is in a time-varying form. From the trajectories of the missile and target, and coordinates of the missile and target shown in Figure 9, it can be seen that the state variables for the IGC system such as intercept strategy and pitch angle rate converge to the neighborhood of some value from Figure 10 respectively. In addition, Figure 10 indicates that the intercept strategy converges to the neighborhood of zero at 0.9 s, achieving a direct hit of the target.
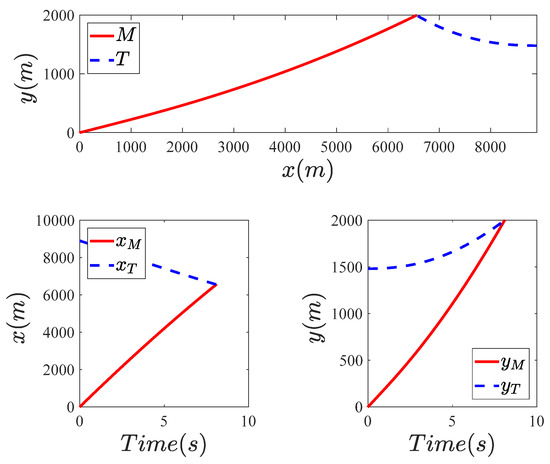
Figure 9.
The trajectories of the missile and target and and coordinates of the missile and target in scenario 2.
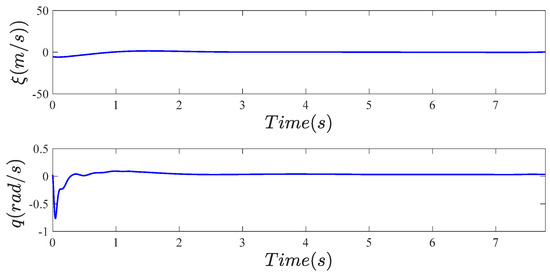
Figure 10.
Time responses of intercept strategy and pitch angle rate in scenario 2.
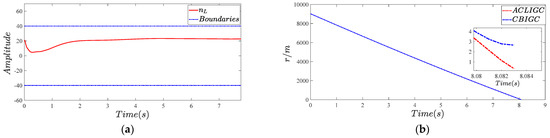
Figure 11.
(a) Time responses of normal acceleration in scenario 2; (b) time response of range along the LOS in scenario 2.
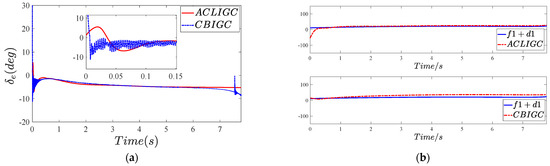
Figure 12.
(a) The time responses of elevator deflection in scenario 2; (b) ACLIGC and CBIGC to estimate in scenario 2.
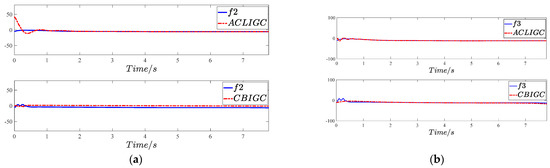
Figure 13.
(a) ACLIGC and CBIGC to estimate in scenario 2; (b) ACLIGC and CBIGC to estimate in scenario 2.
Moreover, according to Table 3 and Figure 11a, the constraint of will not be violated. The final miss distances for ACLIGC and CBIGC are shown in Table 4, and the curves of are given in Figure 11b. It is clear that the ACLIGC proposed in our study obtains a smaller value of to realize direct hit interception. The contrast curve in Figure 12a shows that the elevator deflection amplitude of ACLIGC is , while that of CBIGC is . Meanwhile, the time response curve of the elevator deflection corresponding to the ACLIGC is smoother. Similar to scenario 1, ACLIGC achieves higher estimation accuracy for the uncertainties and time-varying disturbance, as indicated by Figure 12b and Figure 13.
Remark 3.
In a nutshell, because of adopting improved saturation functions, disturbance observer, prediction error with SPEM, and online composite learning, the proposed ACLIGC is capable of achieving good performance despite the target performing various forms of maneuver in different scenarios, as illustrated by the simulation results in Figure 4, Figure 5, Figure 6, Figure 7, Figure 8, Figure 9, Figure 10, Figure 11, Figure 12 and Figure 13.
6. Conclusions
This study considers the problems in the IGC design for a class of STT interceptors, such as input saturation, state constraint, and unknown nonlinear uncertainties. The online composite learning based on disturbance observer is exploited to compensate for multi-source uncertainties. Meanwhile, the state constraint problem can be solved by introducing BLF and improved saturation function. This limits the virtual control and the corresponding tracking error to a certain region, and the missile acceleration constraint will not be violated. Moreover, the design of the auxiliary system ensures the stability of the system. In addition, the saturation function and auxiliary system are designed to handle in case of actuator saturation sufficiently. Finally, stability analysis shows that all signals in the closed-loop system are uniformly ultimately bounded in the presence of input saturation, state constraint, and uncertainties. The effectiveness and robustness of the proposed scheme are illustrated via numerical simulation, and the results indicate that it can achieve direct hit under constant and time-varying maneuvering of the target.
Author Contributions
Conceptualization, Y.B. and T.Y.; methodology, Y.B.; software, Y.B.; formal analysis, T.Y.; writing—original draft preparation, T.Y.; writing—review and editing, W.F. and T.L.; supervision, J.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (No. 62176214, No. 62101590) and Fundamental Research Funds for the Central Universities.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Chen, Z.; Shima, T. Nonlinear optimal guidance for intercepting a stationary target. J. Guid. Control Dyn. 2019, 42, 2418–2431. [Google Scholar] [CrossRef]
- Wang, Z.; Yuan, J.P. Fuzzy adaptive fault tolerant IGC method for STT missiles with time-varying actuator faults and multisource uncertainties. J. Franklin. Inst. 2020, 357, 59–81. [Google Scholar] [CrossRef]
- Liu, W.K.; Wei, Y.Y.; Duan, G.R. Barrier Lyapunov function-based integrated guidance and control with input saturation and state constraints. Aerosp. Sci. Technol. 2019, 84, 845–855. [Google Scholar] [CrossRef]
- Liang, X.L.; Hou, M.Z.; Duan, G.R. Adaptive dynamic surface control for integrated missile guidance and autopilot in the presence of input saturation. J. Aerosp. Eng. 2015, 28, 04014121. [Google Scholar] [CrossRef]
- Park, J.; Kim, Y.; Kim, J.H. Integrated guidance and control using model predictive contrSol with flight path angle prediction against pull-up maneuvering target. Sensors 2020, 20, 3143. [Google Scholar] [CrossRef] [PubMed]
- Guo, J.G.; Xiong, Y.; Zhou, J. A new sliding mode control design for integrated missile guidance and control system. Aerosp. Sci. Technol. 2018, 78, 54–61. [Google Scholar] [CrossRef]
- Zhou, X.H.; Wang, W.H.; Liu, Z.H.; Liang, C.; Lai, C. Impact angle constrained three-dimensional integrated guidance and control based on fractional integral terminal sliding mode control. IEEE Access 2019, 7, 126857–126870. [Google Scholar] [CrossRef]
- Zhou, H.; Zhao, H.; Huang, H.Q.; Zhao, X. Integrated guidance and control design of the suicide UCAV for terminal attack. J. Syst. Eng. Electron. 2017, 28, 546–555. [Google Scholar]
- Shao, X.L.; Wang, H.L. Back-stepping active disturbance rejection control design for integrated missile guidance and control system via reduced-order ESO. ISA Trans. 2015, 57, 10–22. [Google Scholar]
- Liu, W.K.; Wei, Y.Y.; Duan, G.R.; Hou, M.Z. Integrated guidance and control with input saturation and disturbance observer. J. Control Decis. 2018, 5, 277–299. [Google Scholar] [CrossRef]
- Zhang, C.; Wu, Y.J. Non-singular terminal dynamic surface control based integrated guidance and control design and simulation. ISA Trans. 2016, 63, 112–120. [Google Scholar]
- Jiang, S.; Tian, F.Q.; Sun, S.Y.; Liang, W.G. Integrated guidance and control of guided projectile with multiple constraints based on fuzzy adaptive and dynamic surface. Def. Technol. 2020, 16, 1130–1141. [Google Scholar] [CrossRef]
- Yan, X.H.; Shao, G.W.; Yang, Q.Y.; Yu, L.; Yao, Y.W.; Tu, S.X. Adaptive Robust Tracking Control for Near Space Vehicles with Multi-Source Disturbances and Input–Output Constraints. Actuators 2022, 11, 273. [Google Scholar] [CrossRef]
- Wu, B.; Wu, J.L.; Zhang, J.; Tang, G.J.; Zhao, Z.J. Adaptive Neural Control of a 2DOF Helicopter with Input Saturation and Time-Varying Output Constraint. Actuators 2022, 11, 336. [Google Scholar] [CrossRef]
- Panchal, B.; Mate, N.; Talole, S.E. Continuous-time predictive control-based integrated guidance and control. J. Guid. Control Dyn. 2017, 40, 1579–1595. [Google Scholar] [CrossRef]
- He, S.M.; Song, T.; Lin, D.F. Impact angle constrained integrated guidance and control for maneuvering target interception. J. Guid. Control Dyn. 2017, 40, 2653–2661. [Google Scholar] [CrossRef]
- Zhou, D.; Xu, B. Adaptive dynamic surface guidance law with input saturation constraint and autopilot dynamics. J. Guid. Control Dyn. 2016, 39, 1155–1162. [Google Scholar] [CrossRef]
- Guo, J.; Zhou, J.; Zhao, B. Three-dimensional integrated guidance and control for strap-down missiles considering seeker’s field-of-view angle constraint. Trans. Inst. Meas. Control 2020, 42, 1097–1109. [Google Scholar] [CrossRef]
- Liu, X.D.; Huang, W.W.; Du, L.F. An integrated guidance and control approach in three-dimensional space for hypersonic missile constrained by impact angles. ISA Trans. 2017, 66, 164–175. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, W.H.; Wang, D.H.; Peng, K.; Yang, H.B. Command filtered back-stepping missile integrated guidance and autopilot based on extended state observer. Adv. Mech. Eng. 2017, 9, 1687814017733251. [Google Scholar] [CrossRef]
- Li, Z.B.; Dong, Q.L.; Zhang, X.Y.; Gao, Y.F. Impact angle-constrained integrated guidance and control for supersonic skid-to-turn missiles using backstepping with global fast terminal sliding mode control. Aerosp. Sci. Technol. 2022, 122, 107386. [Google Scholar] [CrossRef]
- Chao, M.; Wang, X.M.; Sun, R.S. A novel non-singular terminal sliding mode control-based integrated missile guidance and control with impact angle constraint. Aerosp. Sci. Technol. 2019, 94, 105368. [Google Scholar]
- Tian, J.Y.; Chen, H.F.; Liu, X.C.; Yang, H.B.; Zhang, S.F. Integrated strapdown missile guidance and control with field-of-view constraint and actuator saturation. IEEE Access 2020, 8, 123623–123638. [Google Scholar] [CrossRef]
- Peng, Q.; Guo, J.G.; Zhou, J. Integrated guidance and control system design for laser beam riding missiles with relative position constraints. Aerosp. Sci. Technol. 2020, 98, 105693. [Google Scholar] [CrossRef]
- Ai, X.L.; Shen, Y.C.; Wang, L.L. Adaptive integrated guidance and control for impact angle constrained interception with actuator saturation. Aeronaut. J. 2019, 123, 1437–1453. [Google Scholar] [CrossRef]
- Wang, W.H.; Xiong, S.F.; Wang, S.; Song, S.Y.; Lai, C. Three dimensional impact angle constrained integrated guidance and control for missiles with input saturation and actuator failure. Aerosp. Sci. Technol. 2016, 53, 169–187. [Google Scholar] [CrossRef]
- Wang, S.; Wang, W.H.; Xiong, S.F. Impact angle constrained three-dimensional integrated guidance and control for STT missile in the presence of input saturation. ISA Trans. 2016, 64, 151–160. [Google Scholar] [CrossRef]
- Khankalantary, S.; Sheikholeslam, F. Robust extended state observer-based three dimensional integrated guidance and control design for interceptors with impact angle and input saturation constraints. ISA Trans. 2020, 104, 299–309. [Google Scholar] [CrossRef] [PubMed]
- Zhang, D.H.; Ma, P.; Wang, S.Y.; Chao, T. Multi-constraints adaptive finite-time integrated guidance and control design. Aerosp. Sci. Technol. 2020, 107, 106334. [Google Scholar] [CrossRef]
- Huang, J.; Lin, C.F. Application of sliding mode control to bank-to-turn missile systems. In Proceedings of the First IEEE Regional Conference on Aerospace Control Systems, Westlake Village, CA, USA, 25–27 May 1993. [Google Scholar]
- Zhou, J.L.; Yang, J.Y. Smooth sliding mode control for missile interception with finite-time convergence. J. Guid. Control Dyn. 2015, 38, 1311–1318. [Google Scholar] [CrossRef]
- Shtessel, Y.B.; Shkolnikov, I.A.; Levant, A. Guidance and control of missile interceptor using second-order sliding modes. IEEE Trans. Aerosp. Electron. Syst. 2009, 45, 110–124. [Google Scholar] [CrossRef]
- Liu, W.K.; Wei, Y.Y.; Hou, M.Z.; Duan, G.R. Integrated guidance and control with partial state constraints and actuator faults. J. Frankl. Inst.-Eng. Appl. Math. 2019, 356, 4785–4810. [Google Scholar] [CrossRef]
- Chen, M.; Ge, S.S. Adaptive neural output feedback control of uncertain nonlinear systems with unknown hysteresis using disturbance observer. IEEE Trans. Ind. Electron. 2015, 62, 7706–7716. [Google Scholar] [CrossRef]
- Liu, W.K.; Wei, Y.Y.; Duan, G.R. Integrated guidance and control with input saturation. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017. [Google Scholar]













Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).