1. Introduction
Deployable structures have the ability to fold compactly for convenient storage and transportation and then expand into specific configurations, effectively achieving a large working space [
1,
2]. In recent years, deployable structures have been studied and applied in the field of actuators for robotics [
3,
4], aerospace [
5,
6,
7], and medical devices [
8,
9], where tasks require accurate positioning and adaptability.
Many researchers have dedicated their efforts to the study of deployable structures, focusing on their applications as actuators. Suthar et al. [
10] introduced a multi-strand parallel twisted-scissor deployable structure with linear expansion capability. This deployable structure was utilized as an actuator for a deployable and foldable arm on a small platform. Wu et al. [
11] proposed a quadrangular truss-shaped deployable structure with metamorphic mobility for a robotic manipulator, enabling both deployment and grasping movements. Gao et al. [
12] designed a three-fingered robotic grasper based on deployable structures. The capability to grasp spherical objects and various shapes was demonstrated through experimental validation. A large deployable structure with the capability to form a spherical shape for actuator applications in the aerospace industry was proposed by Chu et al. [
13]. Huang et al. [
14] developed a method for the design of a large, spherical surface-deployable structure that can be utilized as an actuator for antennas. The proposed deployable structure was constructed using irregularly shaped triangular prismoid units. Based on two-layer and two-loop spatial linkage units with 4R coupling chains, a family of novel umbrella-shaped deployable structures was introduced by Cao et al. [
15]. The novel deployable structures have the ability to form an umbrella-shaped surface when deployed, making them suitable for actuator applications in various engineering fields.
Origami, the traditional art of folding paper, can be applied to the design of deployable structures, particularly for actuators [
16,
17,
18,
19]. Soft pneumatic actuators inspired by the accordion pattern with linear motion were proposed by Zaghloul et al. [
20]. The design, fabrication, and testing of origami-inspired soft pneumatic actuators were presented. Zhang et al. [
21] introduced the design, analysis, and experimental validation of a novel pneumatic/cable-driven hybrid linear actuator based on the Kresling pattern. The proposed linear actuators had several advantages over traditional actuators, such as extension ratio and easily controlled position. Liu et al. [
22] employed the folding technique of the Kresling pattern to develop a linear actuator that exhibited several beneficial characteristics, including low driving pressure, high deployable ratio, and fast response. Yu et al. [
23] developed pneumatic foldable actuators with the ability of linear and turning movements based on Miura-ori. The novel actuator with bending motions was proposed by Seo et al. [
24] based on the Yoshimura pattern, which could be utilized to assist the upper limb motion. Jeong et al. [
25] presented an actuator with screw motion based on an origami twisted tower, adopted for the three-finger robotic manipulator. The actuator inspired by the Waterbomb pattern was developed by Li et al. [
26] to be used as a soft robotic gripper. The origami gripper with a hollow hemispherical shape was driven by inflation and offered remarkable adaptability and robustness, enabling it to lift a wide range of objects efficiently. Chen et al. [
27,
28,
29,
30] conducted extensive studies on deployable structures utilizing degree-4 vertices. Their investigation focused on the design of origami tubular structures based on zero-thickness panels, as well as designs considering the thickness of the panels. The proposed methods of deployable structures hold great potential for application in actuators.
Based on the research described above, it can be seen that many actuators have been designed based on developable structures. Most of the current studies on actuators concentrate on linear or planar motion. However, there is limited research on actuators specifically designed to move on a spherical surface with a constant radius. In this paper, a design method for obtaining the spherical origami tubular cells with a constant radius is presented based on non-flat-foldable and non-developable degree-4 vertices. Furthermore, we use these origami cells in the design of origami modules and introduce a family of design models for spherical actuators. The main contributions of this paper are as follows: These deployable structures with a constant radius offer versatility and adaptability, making them applicable to a wide range of applications in different industries. The proposed spherical actuators have significant potential for practical applications in various fields, including antennae, solar arrays, robotic graspers, etc.
The organization of this paper is structured as follows:
Section 2 presents the design of deployable spherical origami tubular cells and modules, followed by a comprehensive analysis of their mobility. The kinematics and geometry of spherical origami tubular cells are analyzed in
Section 3. In
Section 4, four cases are studied to validate the design of deployable structures in spherical actuators based on the combination of multiple origami modules. Conclusions are presented in the
Section 5.
2. Design of Deployable Spherical Origami Tubular Cells and Modules
In this section, a novel spherical origami tubular cell (SOTC) is presented based on the non-flat-foldable and non-developable degree-4 vertex (NFND degree-4 vertex). To develop a novel family of deployable structures with constant curvature during the folding motion, many origami modules are presented by assembling the origami tubular cell. The mobility analysis of SOTCs and origami modules is performed.
2.1. Origami-Based Tubular Cells
The degree-4 vertex consists of four panels and four creases that intersect at a single vertex, as shown in
Figure 1. The sector angle of a panel between two creases is commonly denoted by
. The folding angle of the
i-th crease is denoted by
. For the mountain crease, the range of folding angle is within
. For the valley crease, the range of folding angle is within
. All folding angles are equal to
in the fully folded state. A degree-4 vertex is considered flat-foldable when the folding angle of each crease is transformed into the fully folded state. When the folding angle of each crease is 0 simultaneously in the unfolded state, the degree-4 vertex is developable [
31]. The conditions for flat-foldability and developability are [
32,
33]: (a) Maekawa Theorem: the difference between the number of mountain creases and valley creases is equal to ±2, that is,
M − V = ±2; (b) Kawasaki Theorem 1: the sum of sector angles of opposite panels is
, i.e.,
. Based on whether the crease can be unfolded into the flat state (
) and folded into the fully folded state (
), there are four categories of degree-4 vertices: flat-foldable and developable degree-4 vertex, non-flat-foldable and developable degree-4 vertex, flat-foldable and non-developable degree-4 vertex, and non-flat-foldable and non-developable degree-4 vertex.
When the sector angles of the degree-4 vertex are satisfied
,
, and
(
), the degree-4 vertex is non-flat-foldable and non-developable, with all the creases being mountain creases, as indicated in
Figure 2. During the folding motion, the four creases consistently move on a spherical surface with a constant radius, forming a symmetric convex configuration. Due to this property, the NFND degree-4 vertex is utilized to design a novel origami tubular cell for constructing deployable structures with constant curvature. Based on their symmetry, the NFND degree-4 vertices are categorized as doubly symmetric NFND degree-4 vertex and singly symmetric NFND degree-4 vertex. In the doubly symmetric NFND degree-4 vertex,
, i.e.,
. The doubly symmetric NFND degree-4 vertex exhibits symmetry in both plane 1, formed by creases 1 and 3, and plane 2, formed by creases 2 and 4. When
, the NFND degree-4 vertex is singly symmetric. The singly symmetric NFND degree-4 vertex exhibits symmetry only within plane 1 defined by creases 1 and 3.
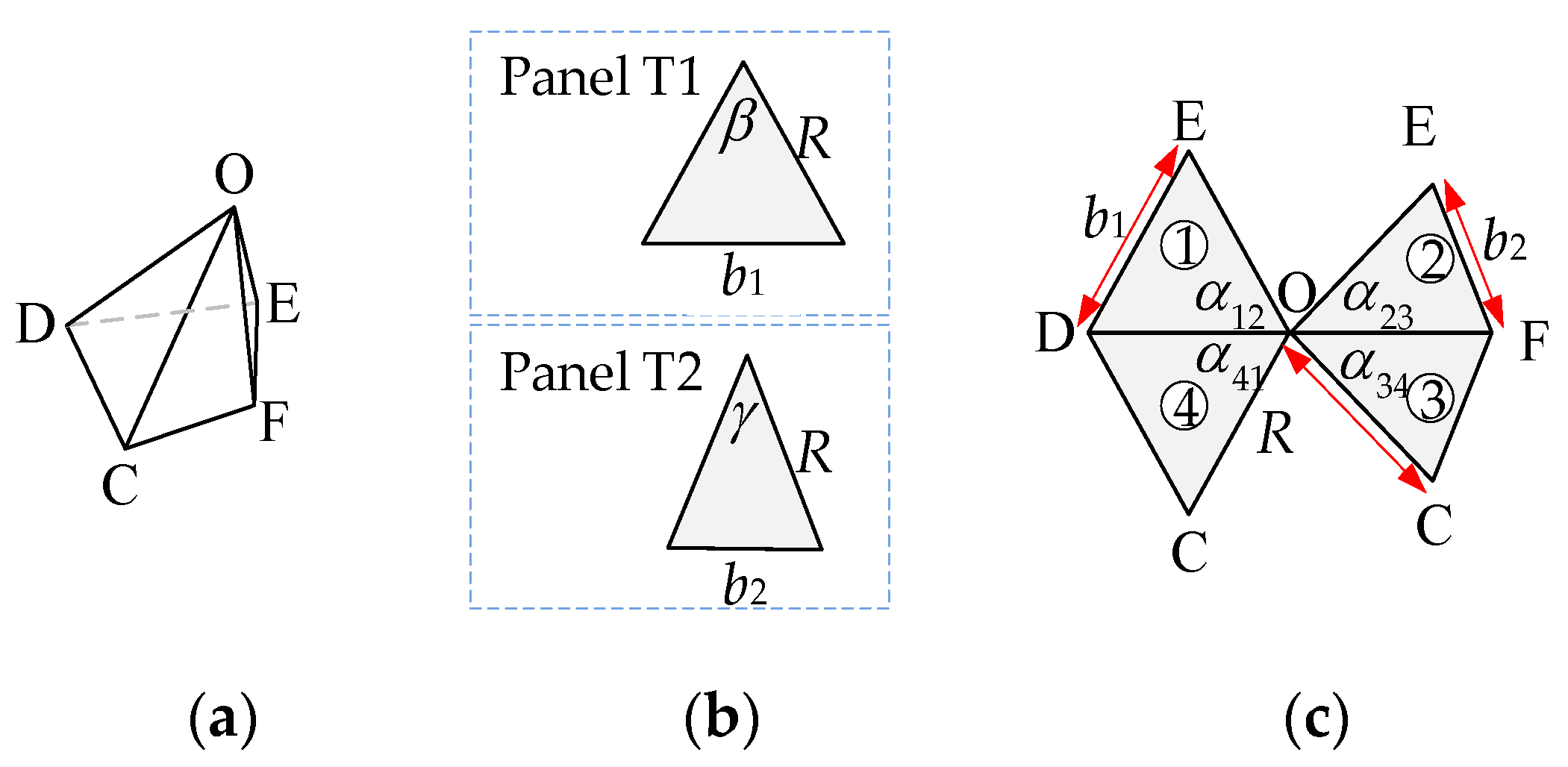
Isosceles triangular panels are selected as constituent panels in two categories of NFND degree-4 vertices to form pyramid structures. As illustrated in
Figure 3, the doubly symmetric pyramid is presented when the geometric parameters of all isosceles triangular panels are the same, i.e.,
,
, and
. The singly symmetric pyramid is composed of two types of isosceles triangular panels, as shown in
Figure 4. The first and fourth panels are panel T1, and the second and third panels are panel T2. The geometric parameters of the singly symmetric pyramid are
,
,
,
, and
. The folding motion of the pyramid is shown in
Figure 5.
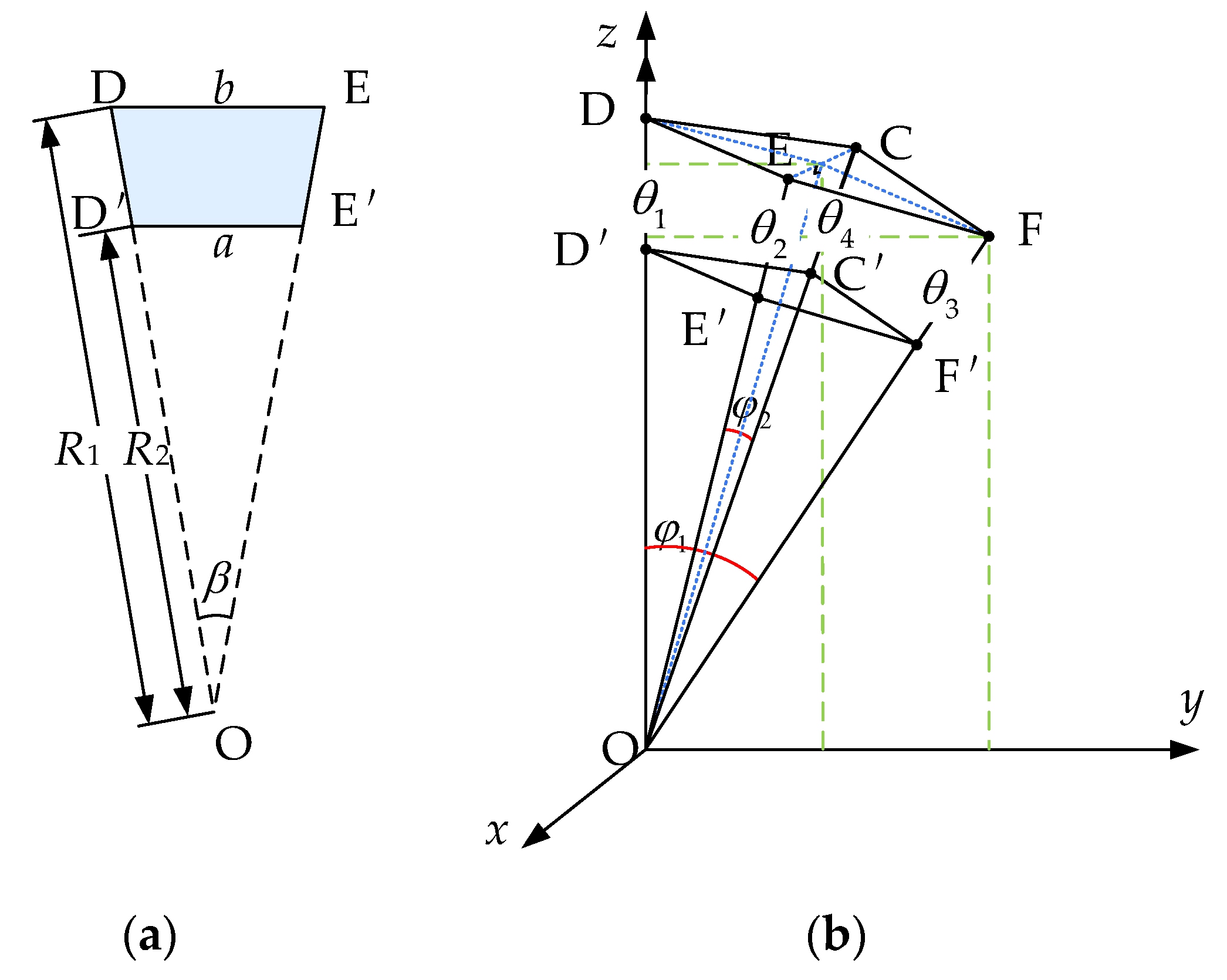
To present the SOTC, we remove specific sections of the four panels from the two types of pyramid structures. The removed sections are four isosceles triangular panels with the same length of sides, i.e.,
. The initial constituent panels are transformed into isosceles trapezoidal panels. Doubly symmetric and singly symmetric SOTCs are shown in
Figure 6. During the folding motion, upper points C, D, E, and F always move on a sphere with radius
R1, and lower points C’, D’, E’, and F’ always move on a sphere with radius
R2 = R1−
r.
2.2. Construction of Deployable Origami Modules
To achieve the modular design of deployable structures, origami modules are proposed through the combination of SOTCs using a kind of linking unit (LU). In the linking unit, two components, C1 and C2, are connected by one rotational joint. The component is constructed by rigidly connecting several isosceles trapezoidal panels. The number of isosceles trapezoidal panels in C1 and C2 is determined by the number and combination of SOTCs. Considering the requirements for combination, each component can be individually customized in design. With this design principle as a foundation, the design of a wide range of LUs can be realized.
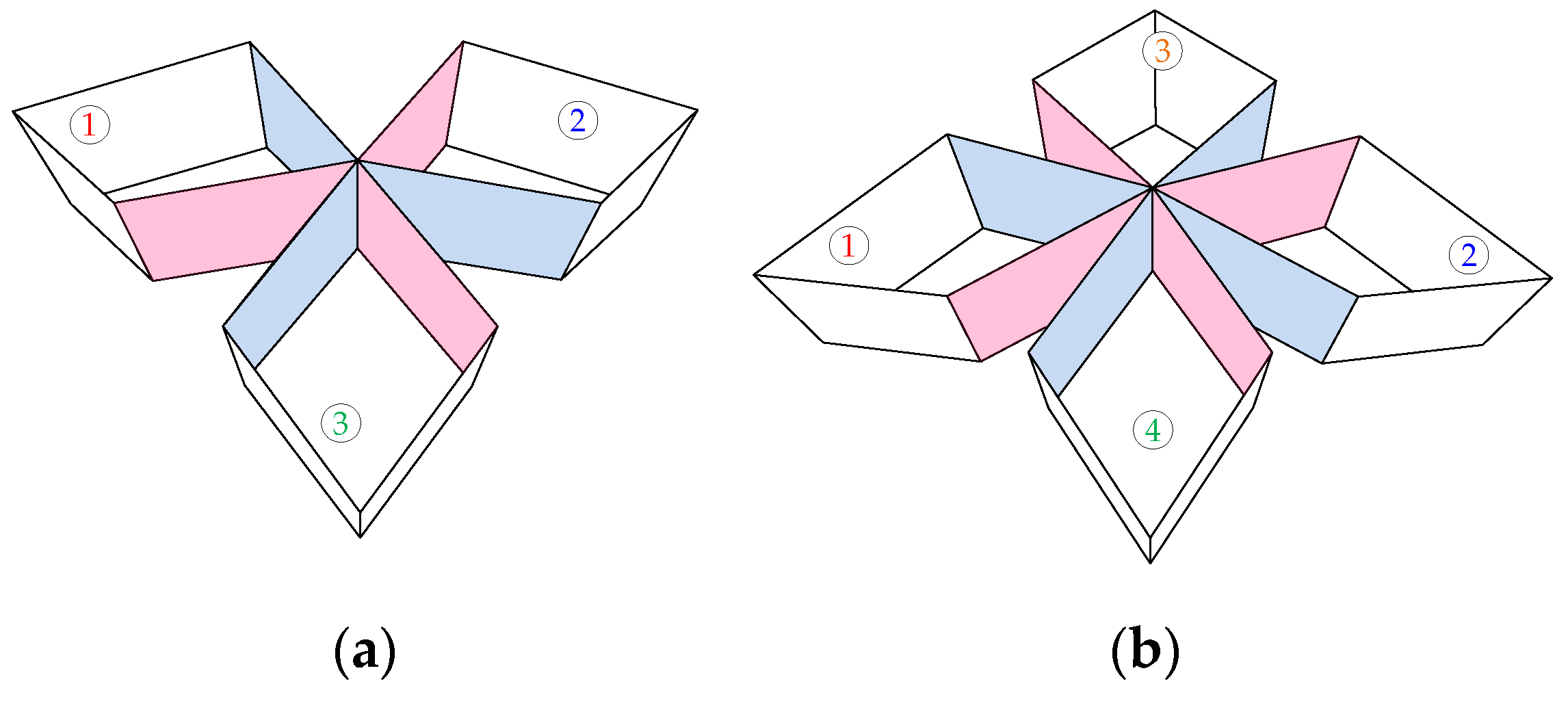
Figure 7 illustrates three types of linking units: LU1, LU2, and LU3. As shown in
Figure 7a, during the motion process, there are four distinct regions between two components in LU1. Due to the constraint between the components of LU1, the range of the folding angle is limited to [0, π]. There are six regions between two components in LU2, as indicated in
Figure 7b. Similarly, the constraint between the components of LU2 limits the range of the folding angle to the interval [0, 2π/3]. In LU3, eight regions are formed between the two components in
Figure 7c. Likewise, for LU3, the range of folding angle is [0, π/2] due to the constraint between its components. All the formed regions can be connected to the basic cells to create novel modules.
SOTCs are assembled by the linking unit. The panels of SOTCs connected by the same component of the LU always maintain synchronized motion throughout the entire motion process.
As depicted in
Figure 8, it is possible to construct two deployable origami modules using LU1. One module, called OM1_L1, is designed by assembling two SOTCs. In OM1_L1, the folding angle of the shared crease in the first cell and the second cell remains consistent. Additionally, assembling four SOTCs allows for the creation of another origami module, referred to as OM1_L2. The folding angle of the shared crease in the first cell and the second cell remains equal to each other, as does the folding angle in the third cell and the fourth cell. Moreover, the folding angle of the shared crease in the first cell and the third cell are always complementary to each other, as are the angles of the shared crease in the second cell and the fourth cell.
As shown in
Figure 9, LU2 is used to assemble three SOTCs, resulting in the origami module OM3. The folding angle of the shared crease remains consistent across the three SOTCs and falls within the interval of [π/3, π]. LU3 is utilized to assemble four SOTCs, creating the origami module OM4. The folding angle of the shared crease remains consistent across the four SOTCs, and it ranges from π/2 to π.
2.3. Mobility Analysis Using Constraint Screws
2.3.1. Mobility of the SOTC
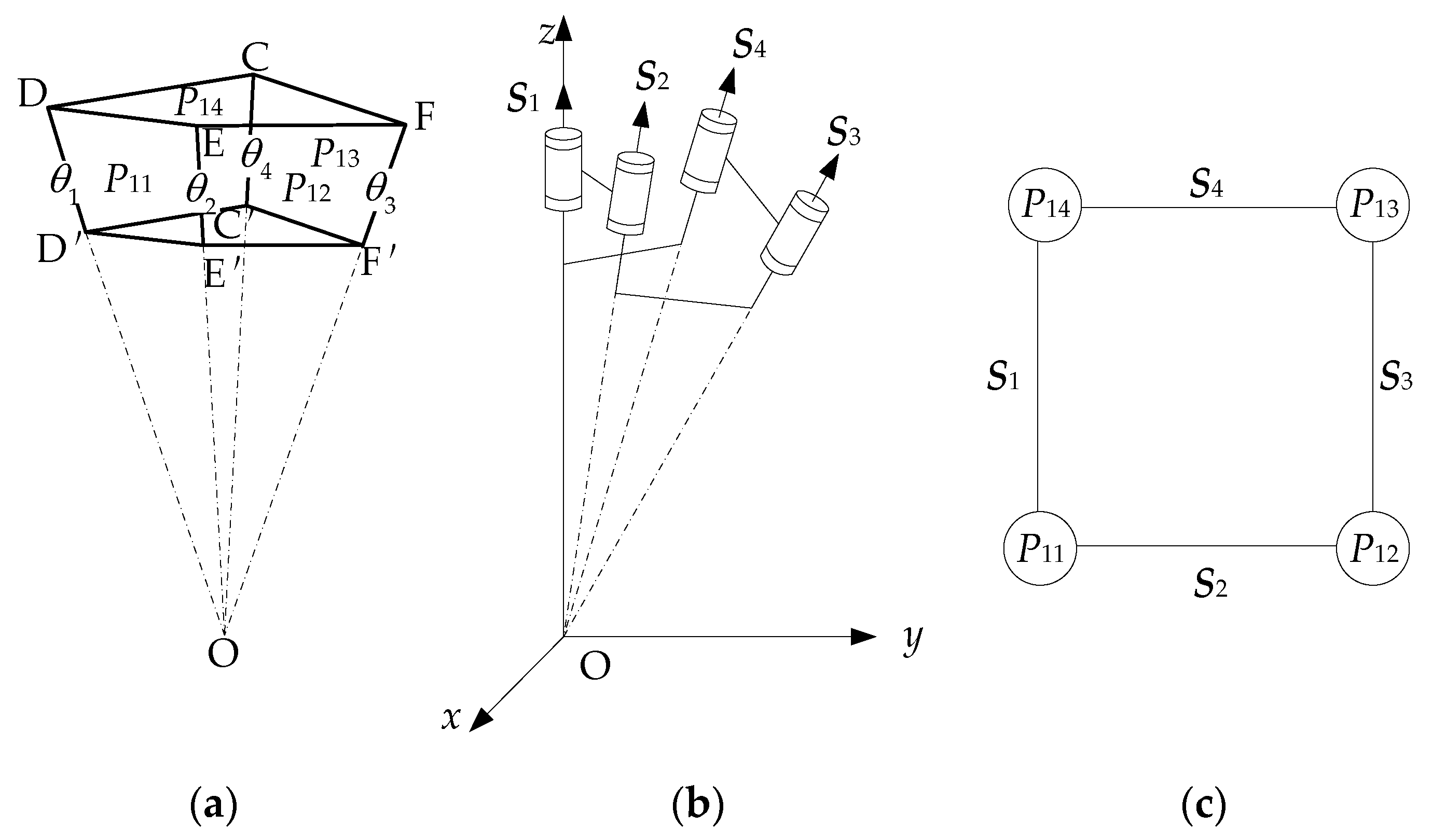
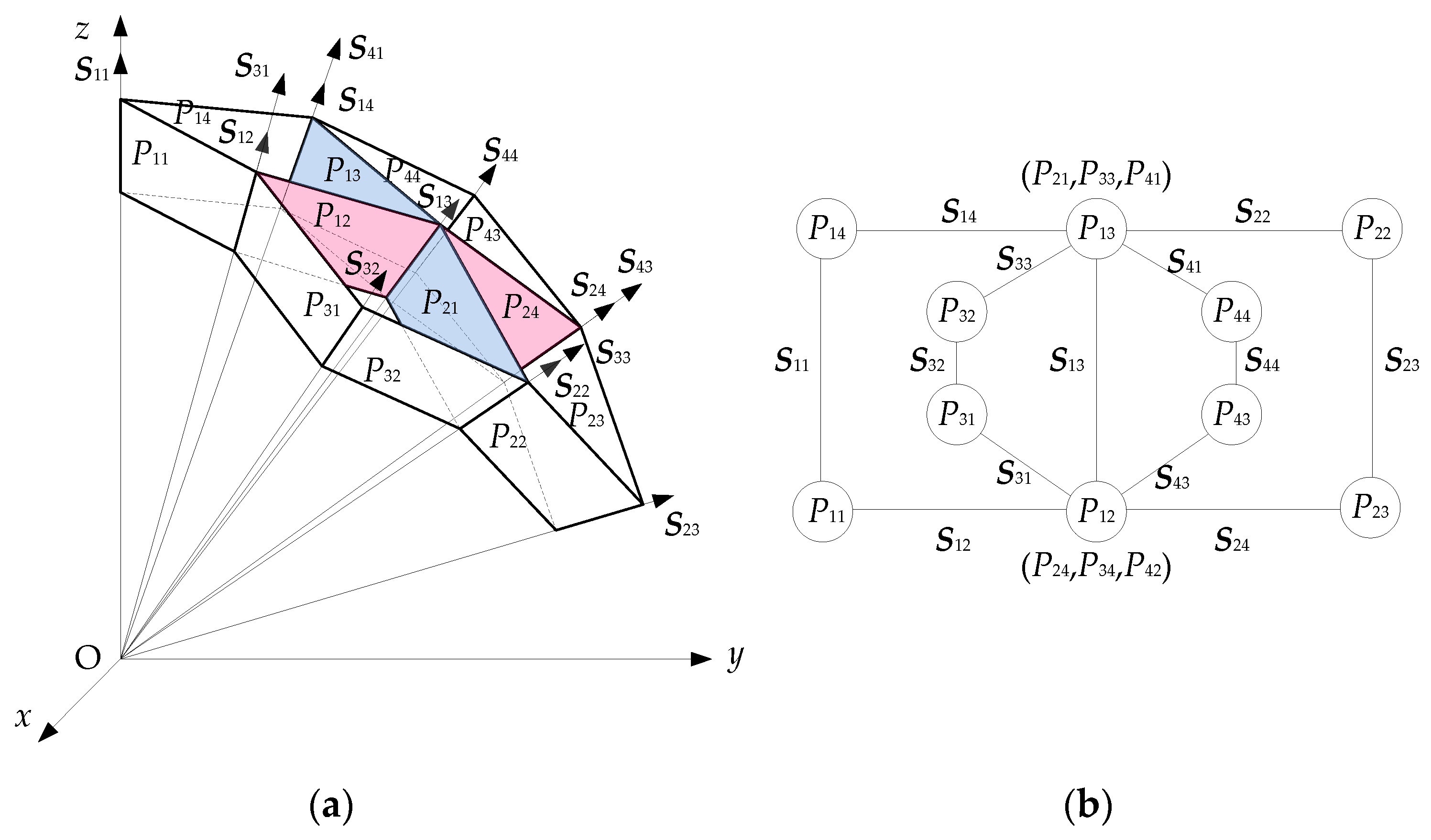
As illustrated in
Figure 10, the axes of the SOTC’s four creases intersect at a common point O. The panels of the SOTC are described as P
1i,
. In rigid origami, the creases and panels can be treated as revolute joints and linkages [
34]. The equivalent kinematic mechanism of the SOTC is a spherical 4R linkage. The topology of this mechanism is a closed single-loop chain.
S1,
S2,
S3, and
S4 are the twists of the four creases of the SOTC. To analyze the mobility of this linkage, the coordinate frame attached at point O is set as the global frame. The
z-axis is along the axis of
S1, and the
y-axis is perpendicular to the
z-axis and coplanar with the axis of
S3. The
x-axis is determined using the right-handed rule.
The motion screws of the SOTC’s equivalent mechanism, expressed in the global frame, are represented as follows:
Based on the screw theory, it can be concluded that there are three constraint screws in the SOTC. They can be expressed as follows:
According to the modified Kutzbach–Grübler mobility formula [
35], the degree of freedom is calculated as follows:
where
DoF is the degree of freedom of mechanism,
d is the rank of the mechanism,
n represents the number of links in the mechanism,
g represents the number of joints,
is the degree of freedom of the
i-th crease,
is the number of redundant constraints, and
represents the local degree of freedom.
According to Equations (2) and (3), the rank of the mechanism is
d = 6 − 3 = 3. Based on the given information of having four links and four joints and no redundant constraints or local mobility, the degree of freedom of SOTC is calculated as follows:
This means that the SOTC has only one degree of freedom.
The constraint screws indicate that forces along the x-axis restrict movement in that direction, while forces along the y-axis and z-axis limit movement accordingly in those respective directions. Therefore, the SOTC has only one rotational degree of freedom around an axis passing through the center of the sphere. The endpoints C, D, E, and F on the SOTC move on the surface of the outer sphere with a radius of R1. Similarly, the points C’, D’, E’, and F’ on the SOTC move on the surface of the inner sphere with a radius of R2. The variation in distances between points on the cell enables the SOTC to have the functionality of contraction and expansion while maintaining a constant curvature.
2.3.2. Mobility Analysis of Deployable Origami Modules
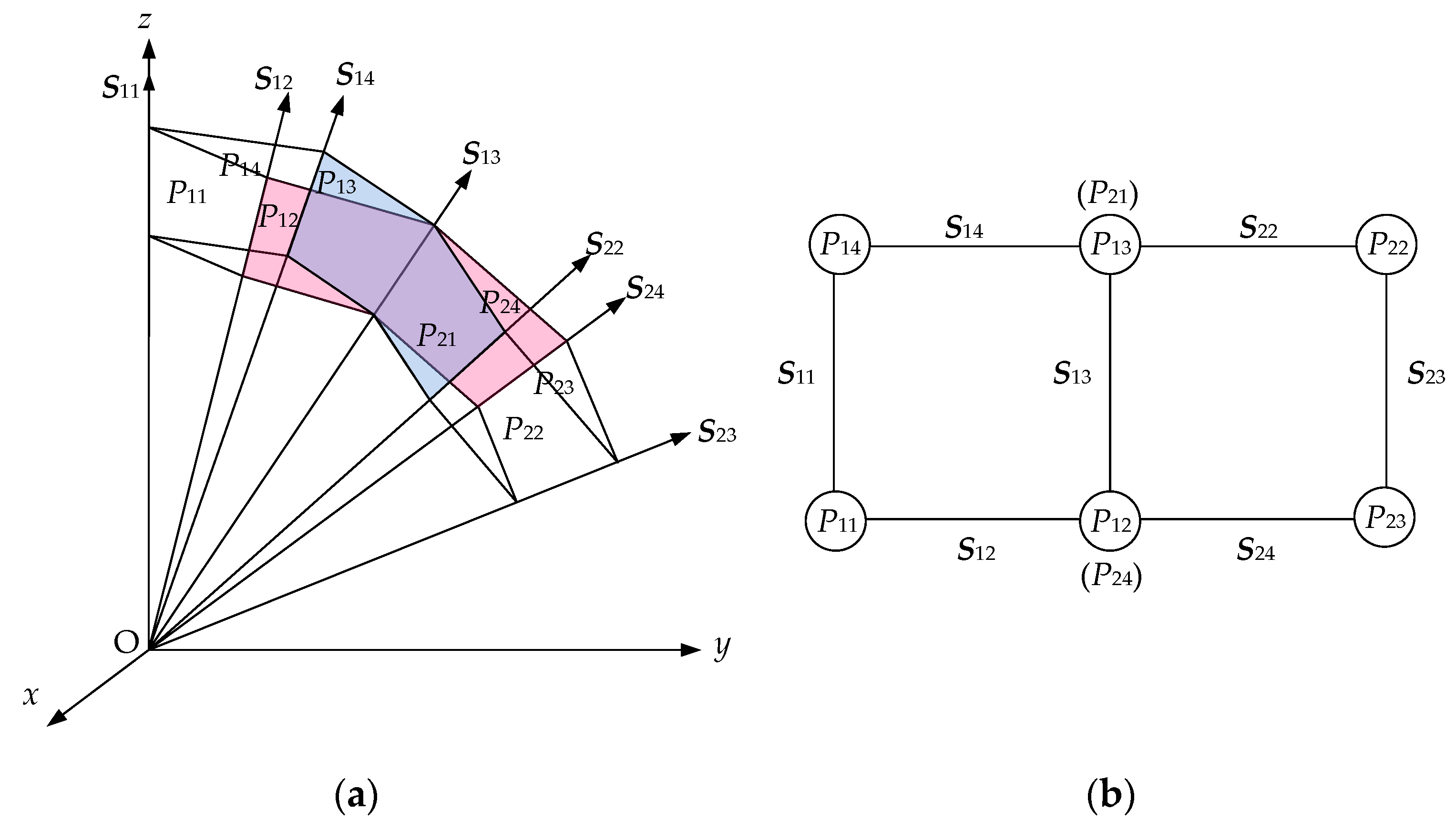
As shown in
Figure 11, OM1_L1 is a multi-closed-loop mechanism. There are seven motion screws in OM1_L1. The motion screws of OM1_L1, expressed in the global frame, is represented as follows:
There are three constraint screws as follows:
The rank of OM1_L1 is
d = 6 − 3 = 3. Based on the information of having six links and seven joints and no redundant constraints or local mobility, the degree of freedom of OM1_L1 is calculated as follows:
It is evident that the constraint screw system of OM1_L1, comprising two combined SOTCs, is identical to that of a single SOTC. They possess the same degree of freedom, exhibiting the same spherical motion. Consequently, if more OM1_L1s are assembled by LU1, the proposed deployable origami structures retain a single degree of freedom.
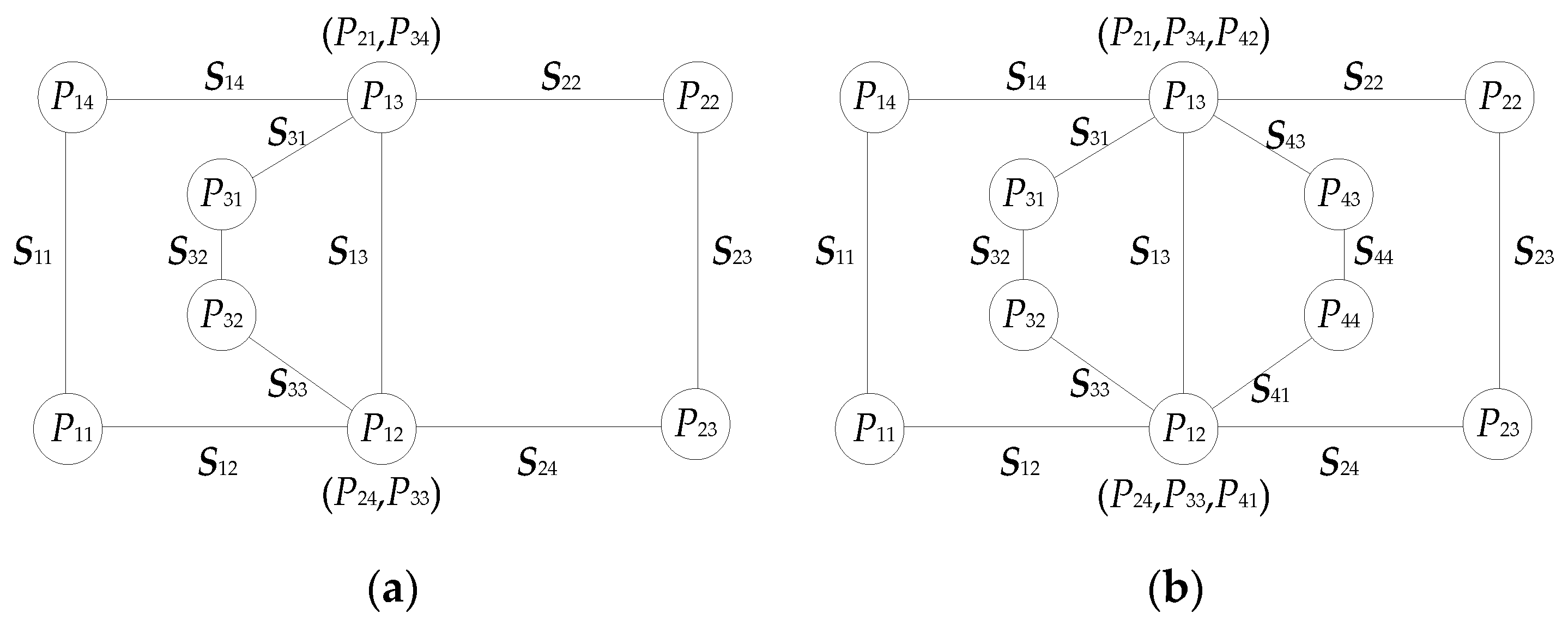
Similarly, the mobility analysis of OM1_L2, OM3, and OM4 are presented. The constraint screw systems of OM1_L2, OM3, and OM4 are identical to that of OM1_L1. The rank of OM1_L2, OM3, and OM4 is
d = 6 − 3 = 3. In
Figure 12, there are 10 links and 13 joints and no redundant constraints or local mobility. The degree of freedom of OM1_L2 is calculated as follows:
In
Figure 13a, there are eight links and ten joints and no redundant constraints or local mobility. The degree of freedom of OM3 is calculated as follows:
In
Figure 13b, the topology diagram of OM4 is similar to that of OM1_L2. The degree of freedom of OM4 is 1.
4. Case Studies for Deployable Structures in Spherical Actuators
In this section, four cases for deployable structures in spherical actuators are presented. Deployable structures are designed based on four deployable origami modules. The designed deployable structures can expand and contract to form a sphere while maintaining a consistent radius. The feasibility of creating spherical structures with constant curvature based on SOTC is validated.
4.1. Case 1
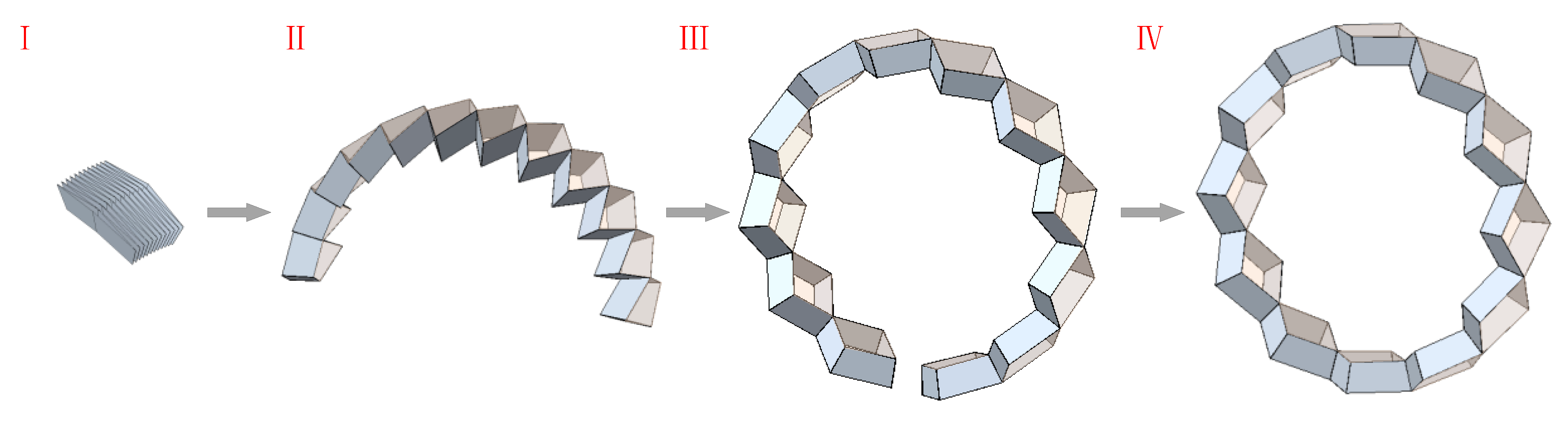
As illustrated in
Figure 17, doubly symmetric SOTCs are assembled into OM1_L1 first. OM1_L1 is always symmetric about the
xoz and
yoz planes. Assuming the geometric parameters of the isosceles trapezoid panels in the doubly symmetric SOTC are as follows:
a = 80,
b = 100, and
. A monolayer spherical deployable origami structure is constructed using twelve doubly symmetric SOTCs, named MSDOS. It is proven that the motion trajectory of the upper endpoints of this spherical deployable origami structure on the
yoz plane forms a circle with a constant radius,
R1 = 287.94. The edge angle
of each SOTC is
when two sides of the structure touch each other at the bottom in state (Ⅳ), as shown in
Figure 17. According to Equations (14)–(16), the kinematic parameters in each SOTC are determined as
and
. Moreover, this structure exhibits versatility in its applications. Not only can it function as an actuator, but it can also be integrated as a crucial component in the assembly of more intricate actuator systems.
4.2. Case 2
To enhance the stability of the deployable origami structure, we propose the combination of OM1_L2s to develop a bilayer spherical deployable origami structure, named BSDOS, as shown in
Figure 18. The BSDOS is composed of 28 identical doubly symmetric SOTCs. The geometric parameters of the SOTCs in the BSDOS are the same as those of the MSDOS. OM1_L2 is always symmetric about the
xoz and
yoz planes, as illustrated in
Figure 8b. The kinematic parameters of the first and second cells are always identical, as well as the kinematic parameters of the third and fourth cells. The folding angle of the
j-th crease in the
i-th cell of OM1_L2 is denoted as
(
). The relationship between the folding angles of four SOTCs in OM1_L2 can be represented as follows:
The motion trajectory of the upper endpoints of this BSDOS on the
yoz plane also forms a circle with a constant radius,
R1 = 287.94. The edge angle
of the first and second cells in each OM1_L2 is
when two sides of the BSDOS touch each other at the bottom in state (Ⅳ), as shown in
Figure 18. According to Equations (14)–(16), the kinematic parameters in each SOTC are determined as
,
,
, and
.
The enveloping surface of this structure is larger compared to the MSDOS. This increased size enables the deployable origami structures to cover a larger area or volume, providing more space for deployment and functionality. By expanding the enveloping surface, the bilayer spherical deployable origami structure can be utilized as an actuator to accommodate larger objects or incorporate additional components within its structure.
4.3. Case 3
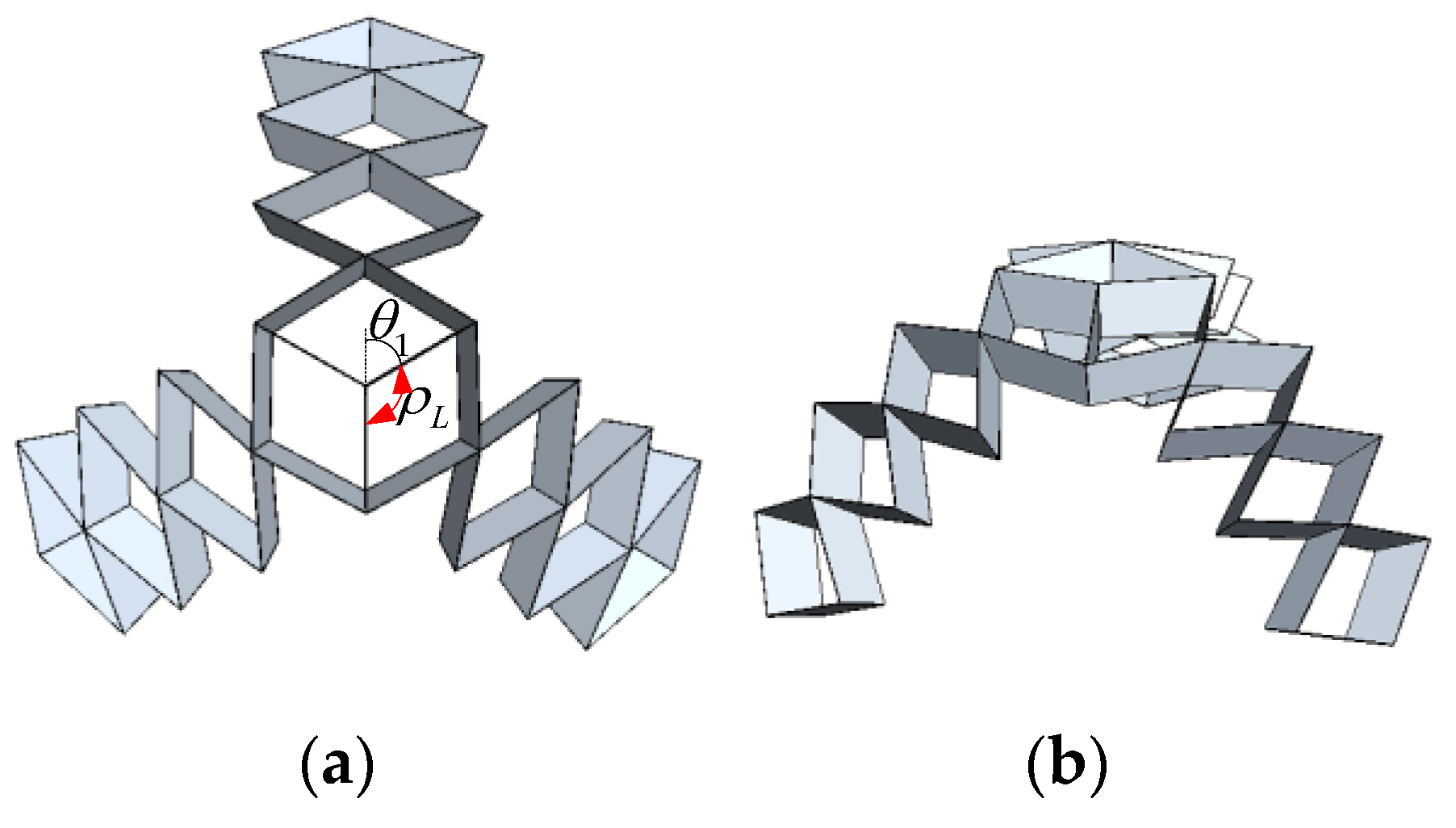
Based on OM3, a spherical deployable origami structure with three branches is proposed, named SDOS3. With the increase in the folding angles and , SDOS3 can be deployed to approximate a spherical shape. If SDOS3 is constructed by the same doubly symmetric SOTCs with geometric parameters a = 80, b = 100, and , each branch of this SDOS3 maintains a consistent curvature while unfolding and folding, ensuring predictable deployment on a sphere with a fixed radius R1 = 287.94.
Because of the shape of LU2’s components, the range of dihedral angles
between two components is
. When
reaches its maximum, the branches of SDOS3 cannot be folded compactly. As depicted in
Figure 19. The SDOS3 comprised by the same doubly symmetric SOTCs is a stable structure when
.
To improve the folding ratio of SDOS3 and minimize its volume when folded, we can construct OM3 by connecting three singly symmetric SOTCs. This OM3 can be further assembled with three monolayer spherical deployable origami structures, resulting in the creation of SDOS3 with a high folding ratio. There are one singly symmetric SOTC and five doubly symmetric SOTCs in each branch. The parameters of singly symmetric SOTCs are derived based on Equations (20) and (23). Let the geometric parameters of SDOS3 be
a1 = 105.66,
b1 = 132.08,
,
a2 = 80,
b2 = 100, and
, its kinematic simulation is illustrated in
Figure 20. The edge angle
of singly symmetric SOTC is the sum of
and
. The edge angle
of doubly symmetric SOTC is equal to
. The angles
and
satisfy
when three branches of the structure touch each other at the bottom in state (Ⅳ), as shown in
Figure 20. The kinematic parameters in singly symmetric SOTC are determined as
,
,
. The kinematic parameters in each doubly symmetric SOTC are
and
. The ability of SDOS3 to deploy and collapse along a spherical surface enables accurate movements, offering the potential for diverse applications in spherical actuators.
4.4. Case 4
In
Figure 21, a spherical deployable origami structure with four branches is proposed, named SDOS4. OM4 is constructed by connecting four singly symmetric SOTCs at first. OM4 is further assembled with four monolayer spherical deployable origami structures, resulting in the creation of the SDOS4 with a high folding ratio. There are one singly symmetric SOTC and four doubly symmetric SOTCs in each branch. With the increase in the folding angles
and
, SDOS4 can also be deployed to approximate a spherical shape. In this SDOS4,
a1 = 115.06,
b1 = 143.83,
,
a2 = 80,
b2 = 100, and
. The angles
and
satisfy
when four branches of the structure touch each other at the bottom in state (Ⅳ), as shown in
Figure 21. According to Equations (21) and (22), the kinematic parameters in the singly symmetric SOTC are
,
, and
. The kinematic parameters in each doubly symmetric SOTC are
and
. SDOS4 is similar to SDOS3 and can be utilized in the design of spherical actuators.
By designing individual linking units, it is possible to construct deployable origami structures with numerous branches. These structures can be deployed with a consistent curvature, making them suitable for creating intricate and adaptable origami-based structures. They have the ability to achieve specific movements to perform various tasks. The proposed structures have the potential to be used in the design of spherical actuators.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




















