
Development of a Universal Adaptive Control Algorithm for an Unknown MIMO System Using Recursive Least Squares and Parameter Self-Tuning


Abstract
:1. Introduction
- (1)
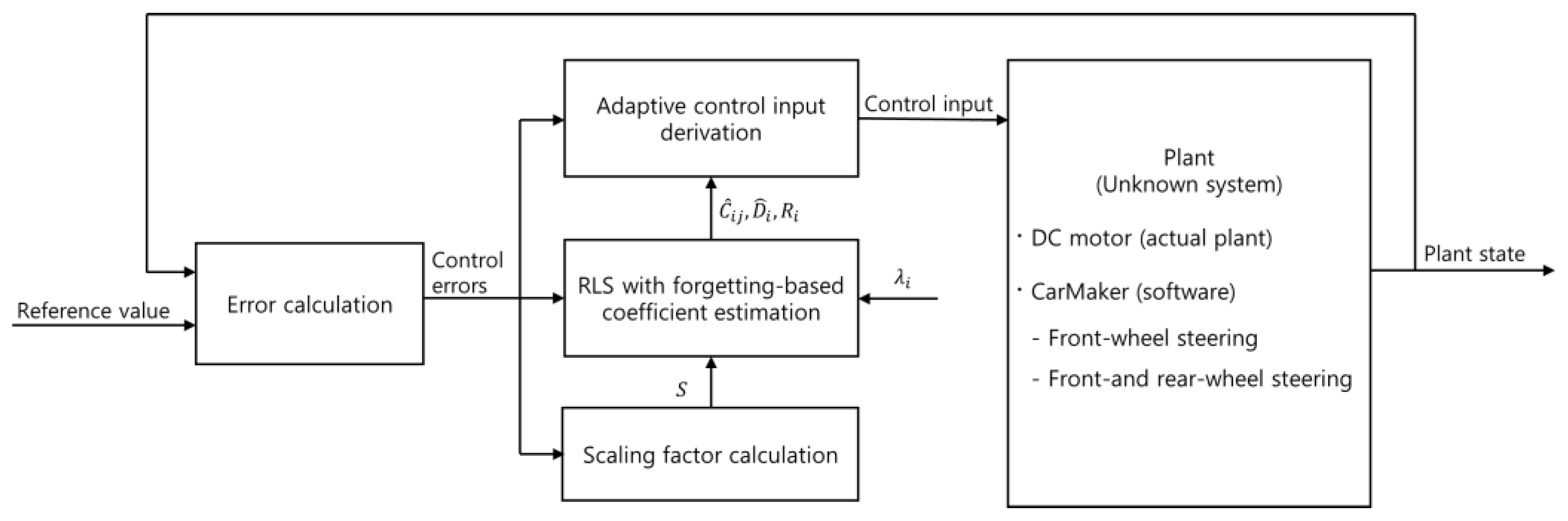
- The proposed algorithm estimates the RLS-based error dynamics coefficients and does not require information regarding the system. Therefore, it can be used as a universal-purpose controller in various unknown systems.
- (2)
- In this study, a virtual test drive simulator, CarMaker, and an actual DC motor platform were used to evaluate the reasonable performance of the proposed universal controller. In the case of the CarMaker-based evaluation, this study attempted to verify the performance of the proposed algorithm in various systems using front-wheel steering vehicles and front-and-rear-wheel steering vehicles.
2. Adaptive Control Algorithm Using RLS and Parameter Self-Tuning
2.1. MIMO System Error Dynamics
- (A1)
- All the control errors have a complex influence on each other.
- (A2)
- At this stage, and the number of control errors and control inputs are the same.
2.2. RLS-Based Coefficient Estimation
2.3. Derivation of Control Input Based on the Lyapunov Direct Method
3. Performance Evaluation
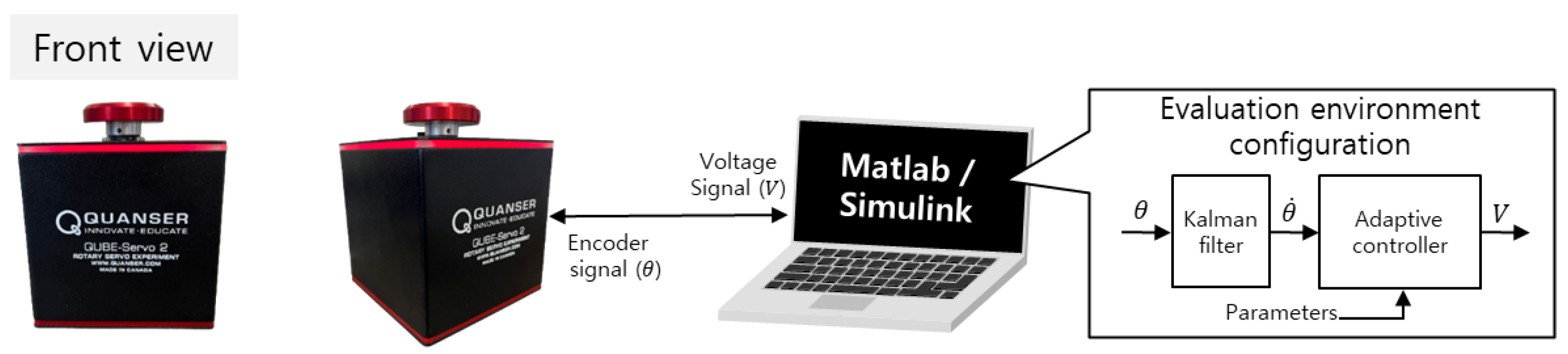
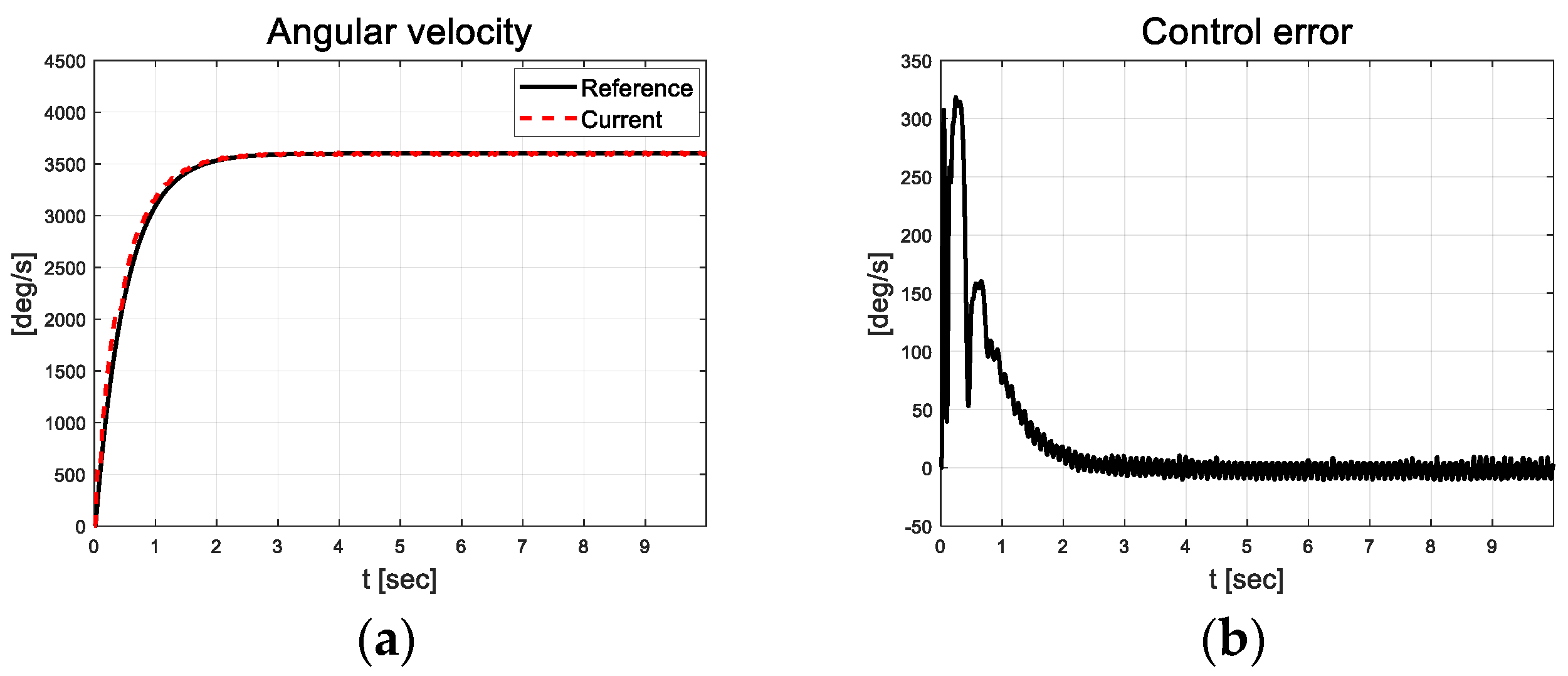
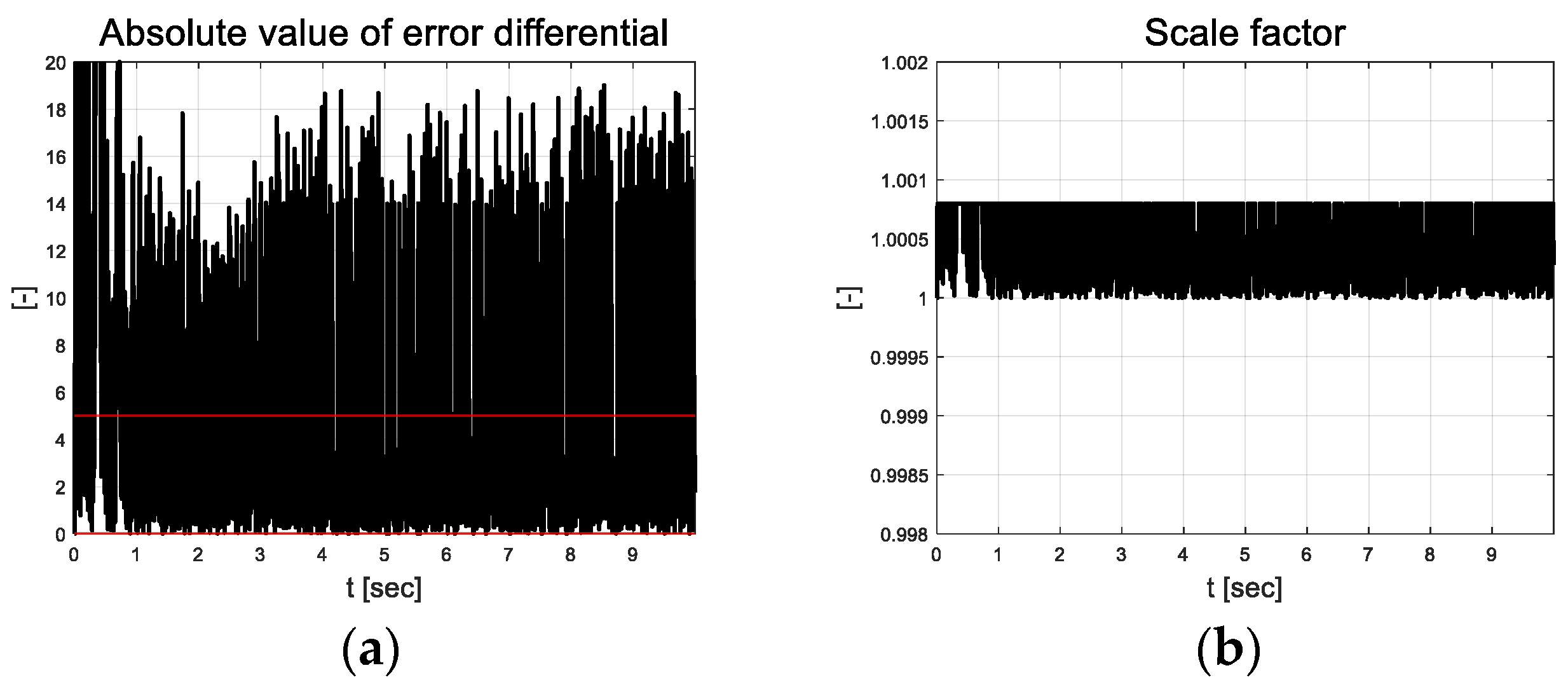
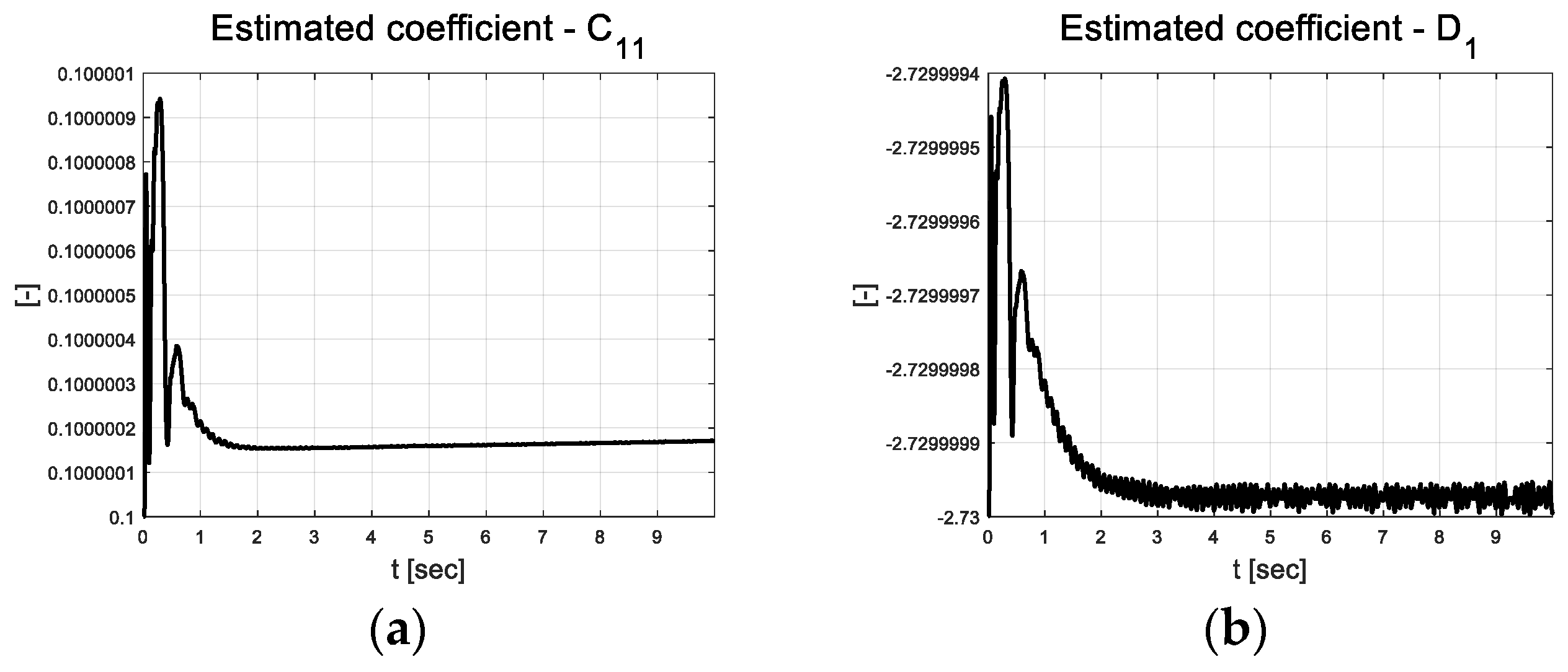
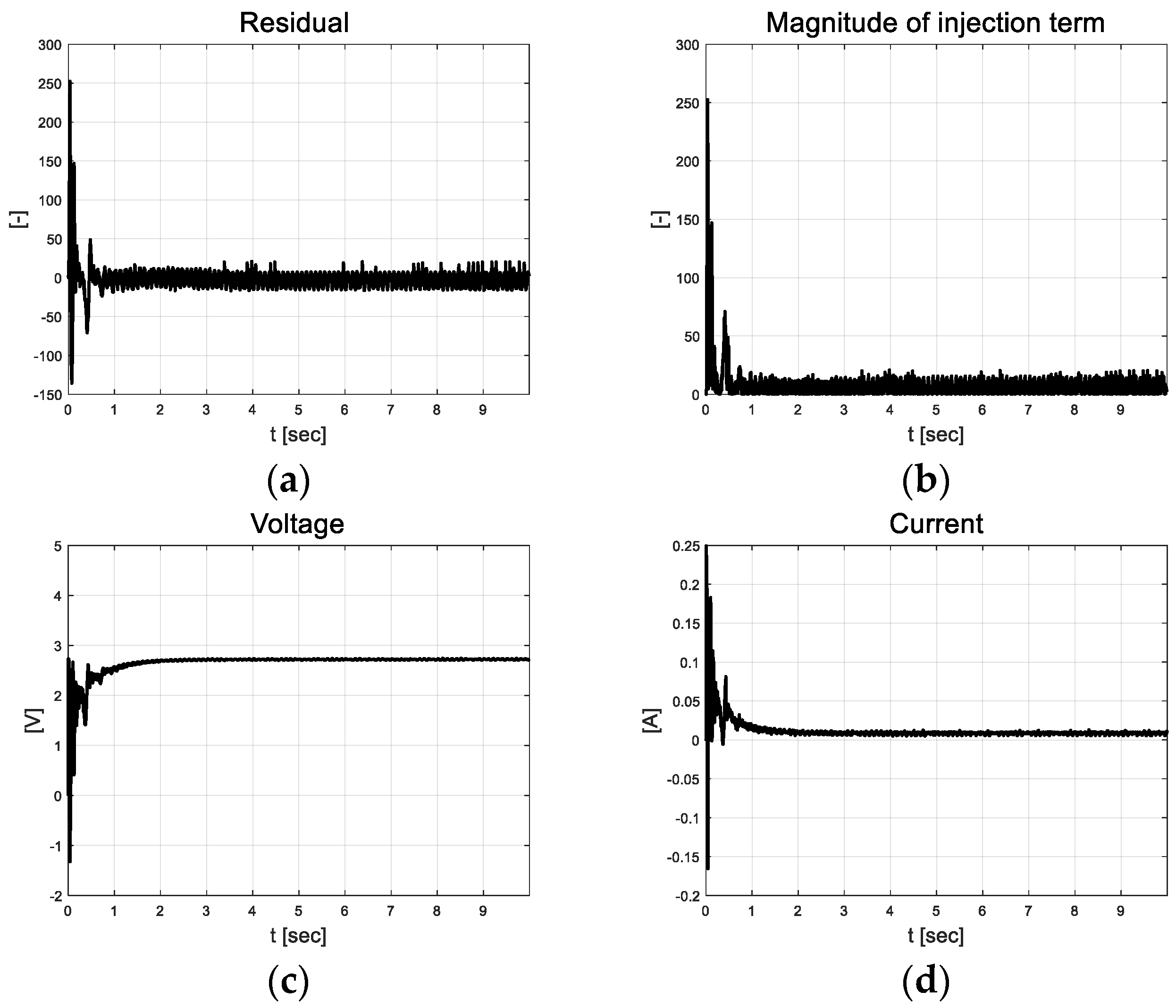
3.1. Performance Evaluation of DC Motor-Based Adaptive Speed Control
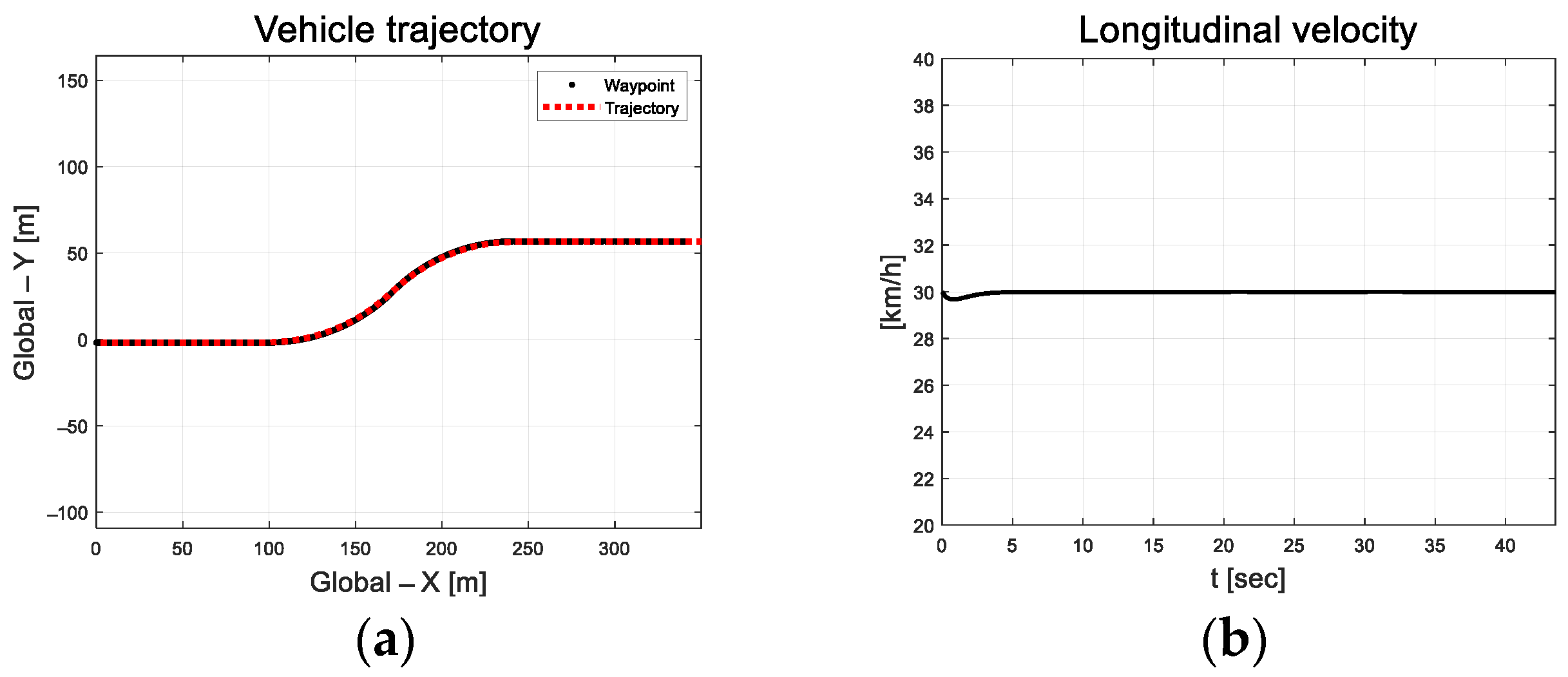
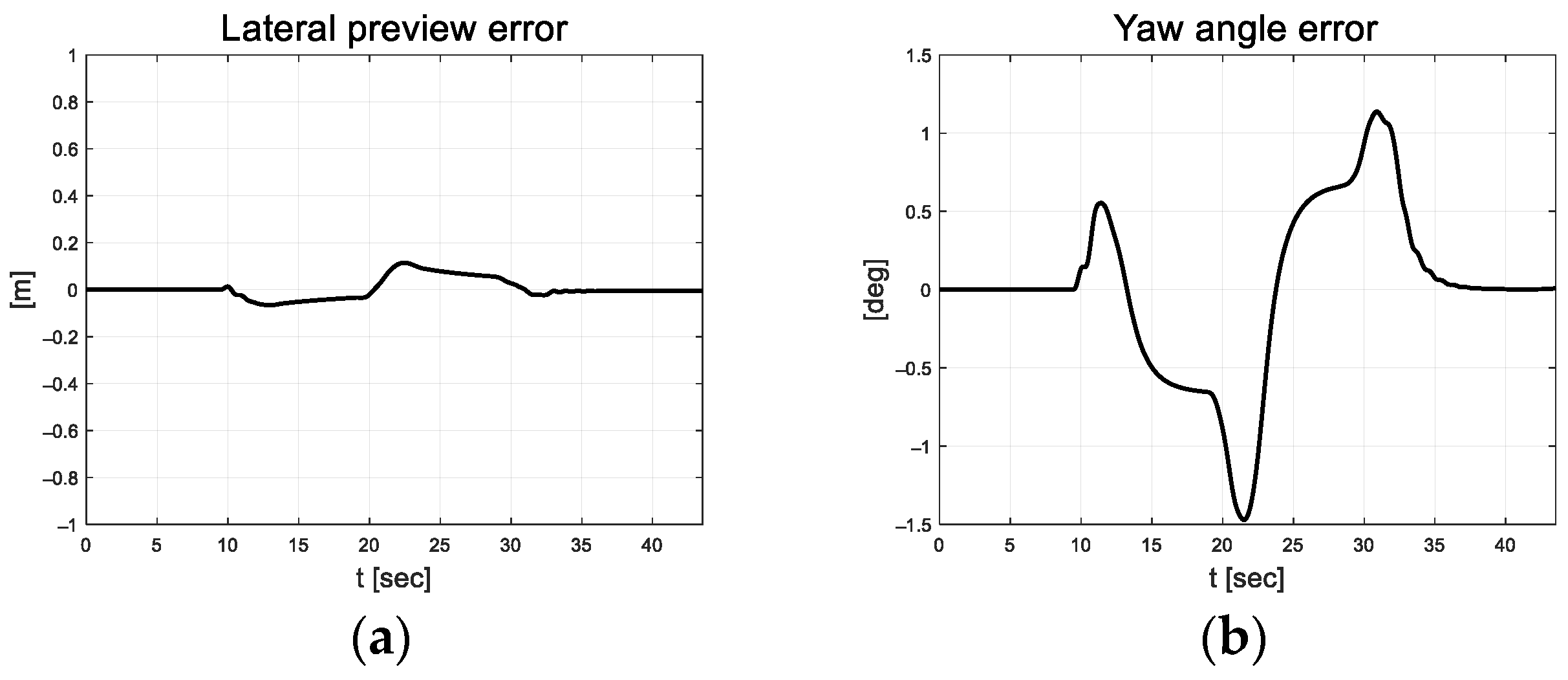
3.2. Performance Evaluation of CarMaker-Based Adaptive Path Tracking Control
3.2.1. Front-Wheel Steering Vehicle-Based Adaptive Path Tracking Control
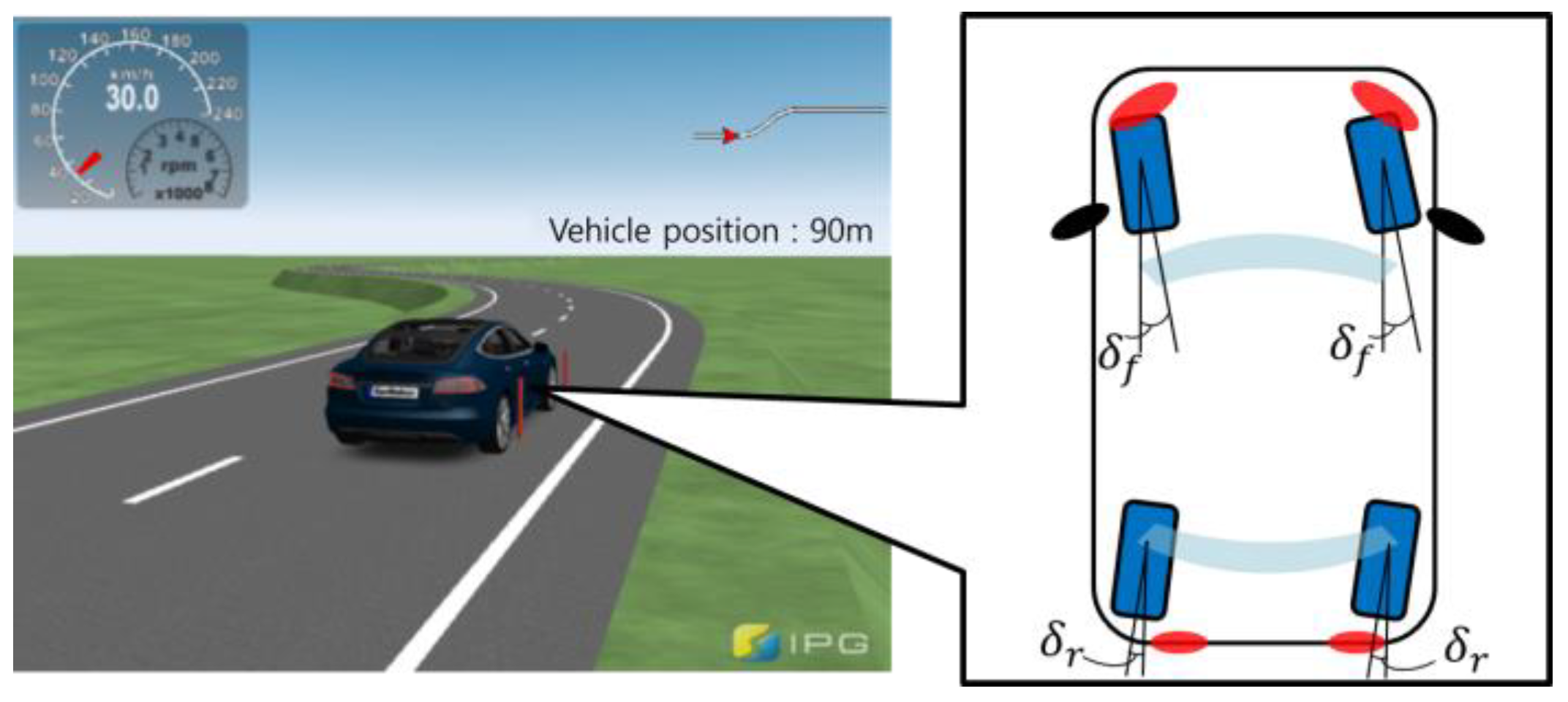
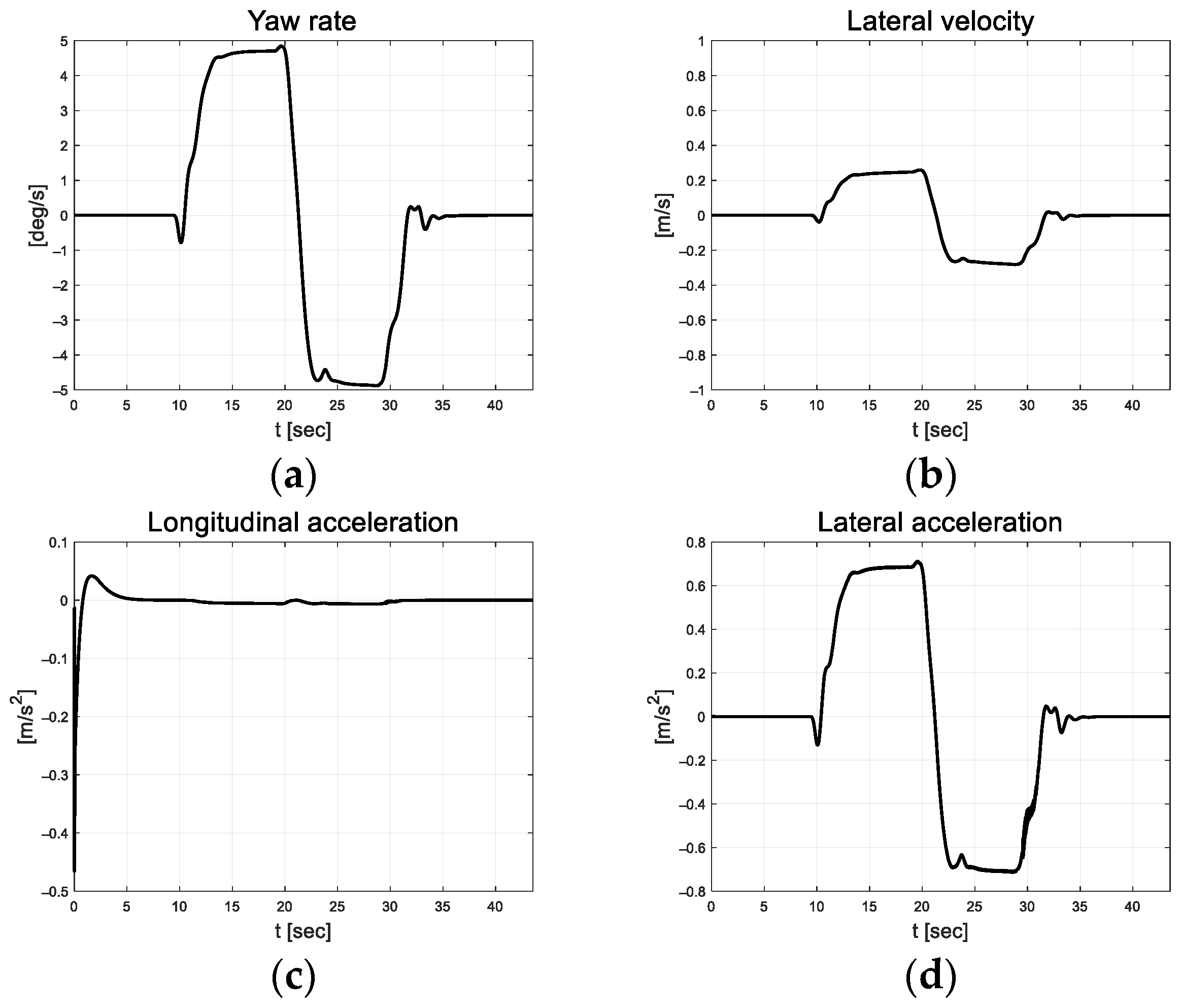
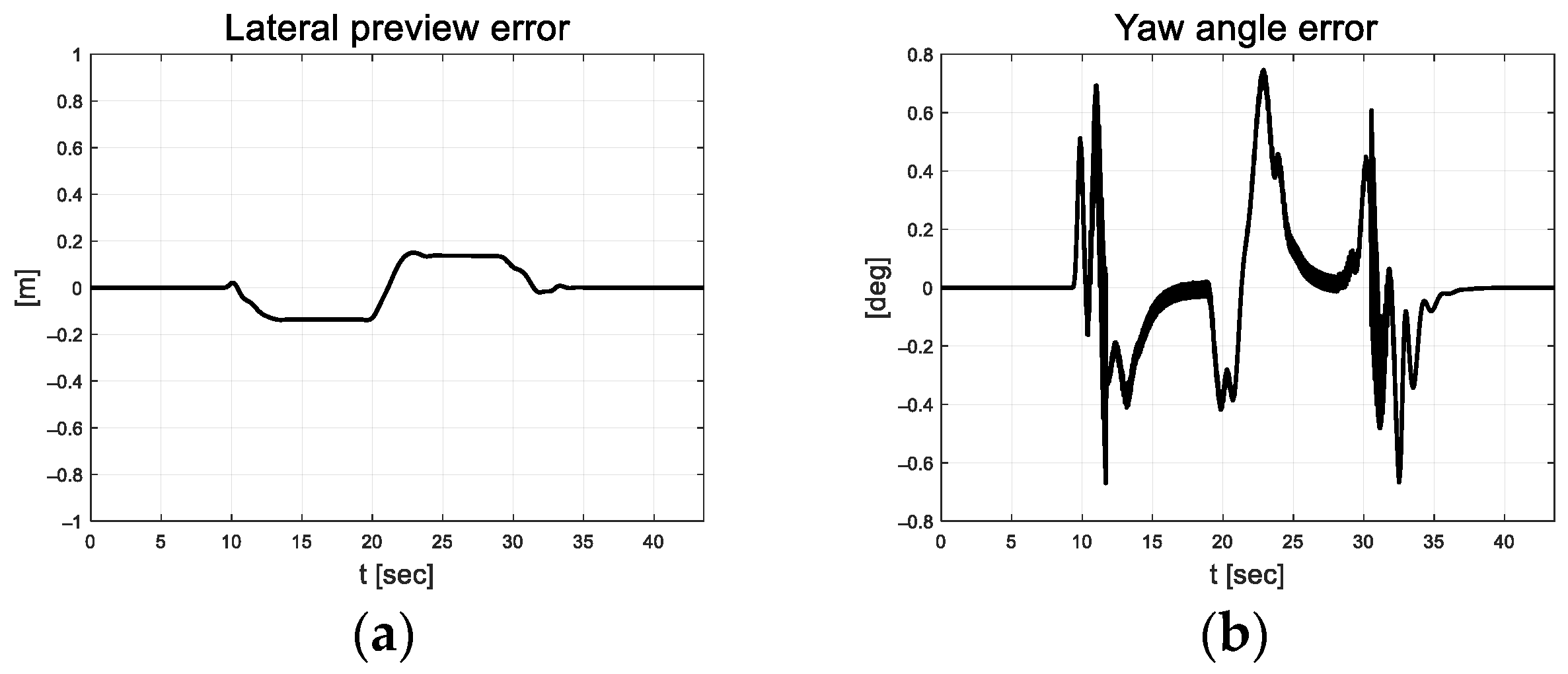
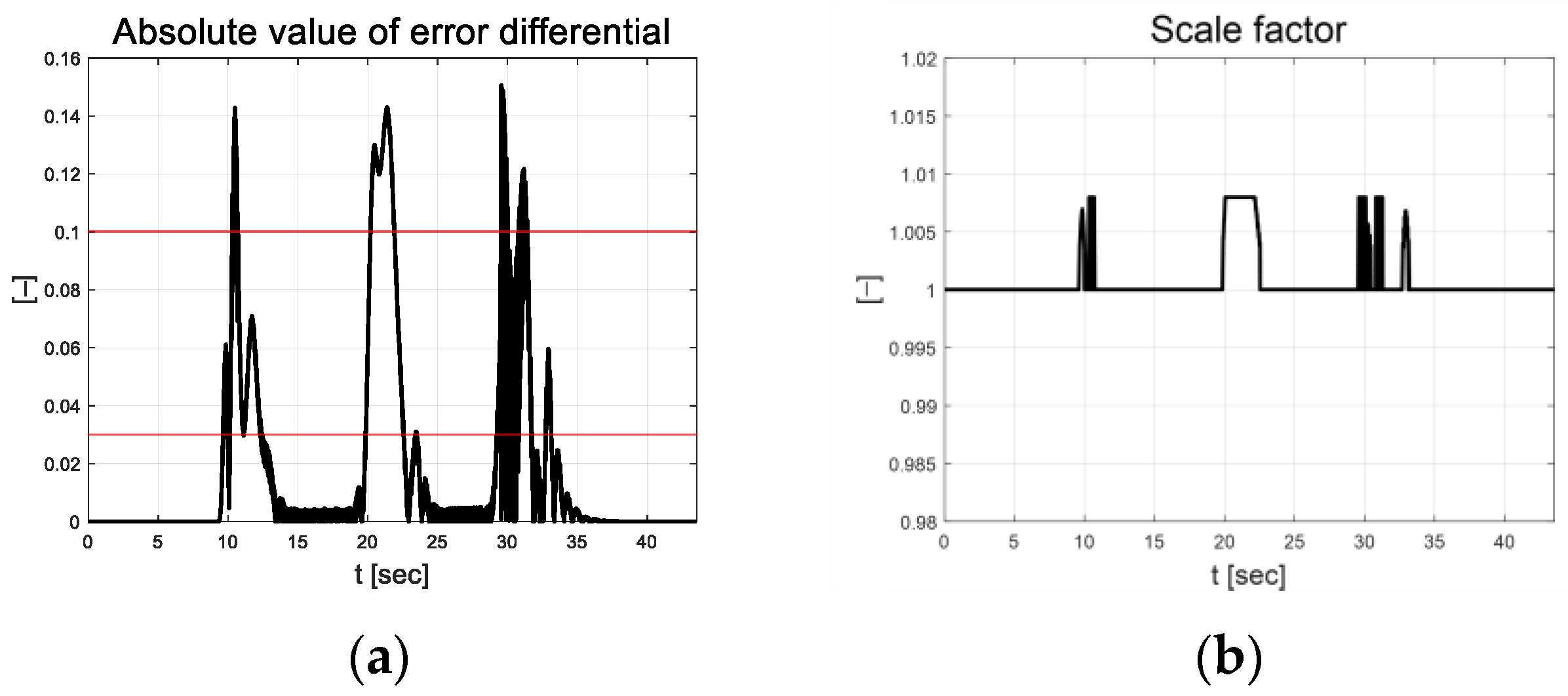
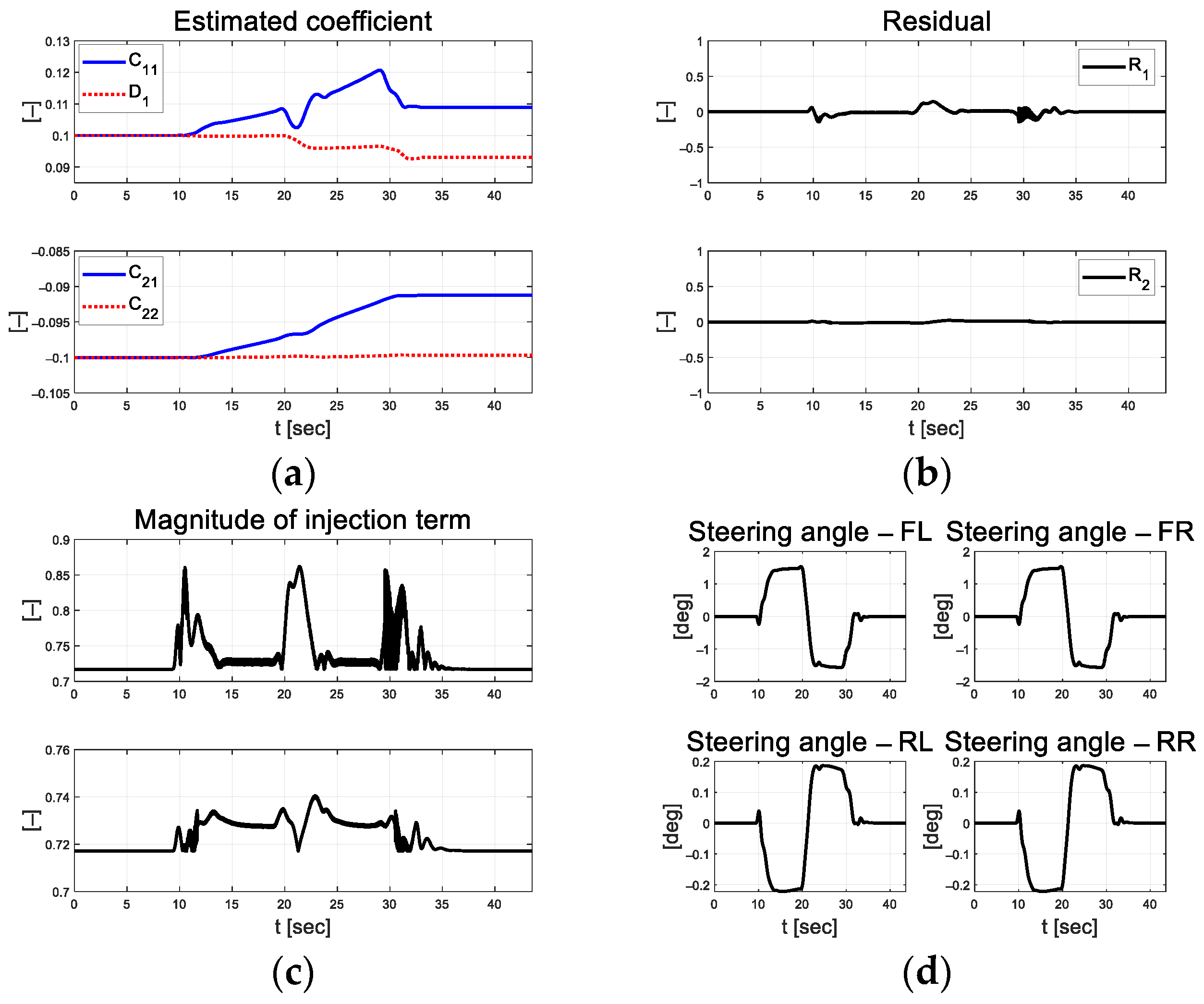
3.2.2. Front-and-Rear-Wheel Steering Vehicle-Based Adaptive Path Tracking Control
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, K.; Meng, F.; Meng, S.; Wang, C. Robust Controller Design for Multi-Input Multi-Output systems using coefficient diagram method. Entropy 2021, 23, 1180. [Google Scholar] [CrossRef] [PubMed]
- Homaeinezhad, M.R.; Mostaghim, M.S. Synthetic Lyapunov stabilization technique for designing actuation-constrained multi-input multi-output control systems. J. Franklin. Inst. 2022, 359, 5891–5918. [Google Scholar] [CrossRef]
- Pongfai, J.; Angeli, C.; Shi, P.; Su, X.; Assawinchaichote, W. Optimal PID controller autotuning design for MIMO nonlinear systems based on the adaptive SLP algorithm. Int. J. Control Autom. Syst. 2021, 19, 392–403. [Google Scholar] [CrossRef]
- Homaeinezhad, M.R.; Ebrahimi, M.M. Tracking control stabilization of systems manipulated by constrained parabolic nonlinear actuator. Int. J. Dyn. Control 2023, 1–18. [Google Scholar] [CrossRef]
- Dhananjaya, M.; Ponuru, D.; Babu, T.S.; Aljafari, B.; Alhelou, H.H. A new multi-output DC-DC converter for electric vehicle application. IEEE Access 2022, 10, 19072–19082. [Google Scholar] [CrossRef]
- Al-Mahturi, A.; Santoso, F.; Garratt, M.A.; Anavatti, S.G. A Robust Self-Adaptive Interval Type-2 TS Fuzzy Logic for Controlling Multi-Input–Multi-Output Nonlinear Uncertain Dynamical Systems. IEEE Trans. Syst. Man Cybern. Syst. 2020, 52, 655–666. [Google Scholar] [CrossRef]
- Mecifi, M.; Boumediene, A.; Boubekeur, D. Fuzzy sliding mode control for trajectory tracking of an electric powered wheelchair. AIMS Electron. Electr. Eng. 2021, 5, 176–193. [Google Scholar] [CrossRef]
- Huang, X.; Song, Y. Distributed and performance guaranteed robust control for uncertain MIMO nonlinear systems with controllability relaxation. IEEE Trans. Autom. Control 2022, 68, 2460–2467. [Google Scholar] [CrossRef]
- Thanh, H.L.N.N.; Vu, M.T.; Nguyen, N.P.; Mung, N.X.; Hong, S.K. Finite-time stability of MIMO nonlinear systems based on robust adaptive sliding control: Methodology and application to stabilize chaotic motions. IEEE Access 2021, 9, 21759–21768. [Google Scholar] [CrossRef]
- Zeghlache, S.; Benyettou, L.; Djerioui, A.; Ghellab, M.Z. Twin rotor MIMO system experimental validation of robust adaptive fuzzy control against wind effects. IEEE Syst. J. 2020, 16, 409–419. [Google Scholar] [CrossRef]
- Usman, H.M.; Mukhopadhyay, S.; Rehman, H. Permanent magnet DC motor parameters estimation via universal adaptive stabilization. Control Eng. Pract. 2019, 90, 50–62. [Google Scholar] [CrossRef]
- Laid, S.; Boubekeur, B. Model-free and adaptive control of a dc motor: A comparative study. In Proceedings of the 2020 International Conference on Electrical Engineering, Istanbul, Turkey, 25–27 September 2020; pp. 1–6. [Google Scholar]
- Mynar, Z.; Vaclavek, P.; Blaha, P. Synchronous reluctance motor parameter and state estimation using extended Kalman filter and current derivative measurement. IEEE Trans. Ind. Electron. 2020, 68, 1972–1981. [Google Scholar] [CrossRef]
- Jiang, Y.; Xu, X.; Zhang, L. Heading tracking of 6WID/4WIS unmanned ground vehicles with variable wheelbase based on model free adaptive control. Mech. Syst. Signal Process. 2021, 159, 107715. [Google Scholar] [CrossRef]
- Wang, J.; Tan, G.; Sun, C. Research on vehicle four-wheel steering based on model-free adaptive control. In Proceedings of the 2020 5th International Conference on Electromechanical Control Technology and Transportation, Nanchang, China, 15–17 May 2020; pp. 372–376. [Google Scholar]
- Fliess, M.; Join, C. An alternative to proportional-integral and proportional-integral-derivative regulators: Intelligent proportional-derivative regulators. Int. J. Robust Nonlinear Control 2022, 32, 9512–9524. [Google Scholar] [CrossRef]
- Liu, S.; Hou, Z.; Tian, T.; Deng, Z.; Li, Z. A novel dual successive projection-based model-free adaptive control method and application to an autonomous car. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 3444–3457. [Google Scholar] [CrossRef] [PubMed]
- Moreno-Gonzalez, M.; Artuñedo, A.; Villagra, J.; Join, C.; Fliess, M. Speed-adaptive model-free lateral control for automated cars. IFAC-PapersOnLine 2022, 55, 84–89. [Google Scholar] [CrossRef]
- Farhan, A.; Abdelrahem, M.; Saleh, A.; Shaltout, A.; Kennel, R. Simplified sensorless current predictive control of synchronous reluctance motor using online parameter estimation. Energies 2020, 13, 492. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, J. Ultra-local model predictive control: A model-free approach and its application on automated vehicle trajectory tracking. Control Eng. Pract. 2020, 101, 104482. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, X. Autonomous path tracking control of intelligent electric vehicles based on lane detection and optimal preview method. Expert Syst. Appl. 2019, 121, 38–48. [Google Scholar] [CrossRef]
- Matraji, I.; Al-Wahedi, K.; Al-Durra, A. Higher-order super-twisting control for trajectory tracking control of skid-steered mobile robot. IEEE Access 2020, 8, 124712–124721. [Google Scholar] [CrossRef]
- Moudoud, B.; Aissaoui, H.; Diany, M. Robust trajectory tracking control based on sliding mode of Differential Driving FourWheeled Mobile Robot. In Proceedings of the 2020 IEEE 6th International Conference on Optimization and Applications, Beni Mellal, Morocco, 20–21 April 2020; pp. 1–5. [Google Scholar]
- Fnadi, M.; Plumet, F.; Benamar, F. Model predictive control based dynamic path tracking of a four-wheel steering mobile robot. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems, Macau, China, 3–8 November 2019; pp. 4518–4523. [Google Scholar]
- Bai, G.; Liu, L.; Meng, Y.; Luo, W.; Gu, Q.; Wang, J. Path tracking of wheeled mobile robots based on dynamic prediction model. IEEE Access 2019, 7, 39690–39701. [Google Scholar] [CrossRef]
- Mohammadzadeh, A.; Taghavifar, H. A novel adaptive control approach for path tracking control of autonomous vehicles subject to uncertain dynamics. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 2115–2126. [Google Scholar] [CrossRef]
- Chen, I.M.; Chan, C.Y. Deep reinforcement learning based path tracking controller for autonomous vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 541–551. [Google Scholar] [CrossRef]
- Shan, Y.; Zheng, B.; Chen, L.; Chen, L.; Chen, D. A reinforcement learning-based adaptive path tracking approach for autonomous driving. IEEE Trans. Veh. Technol. 2020, 69, 10581–10595. [Google Scholar] [CrossRef]
- Moudoud, B.; Aissaoui, H.; Diany, M. Fuzzy adaptive sliding mode controller for electrically driven wheeled mobile robot for trajectory tracking task. J. Control Decis. 2022, 9, 71–79. [Google Scholar] [CrossRef]
- Aware, P.; Hanwate, S.; Wanaskar, V. Yaw rate and sideslip angle control of active 4WS using a two-time scale based novel sliding mode control. In Proceedings of the 2021 5th International Conference on Intelligent Computing and Control Systems, Madurai, India, 6–8 May 2021; pp. 548–553. [Google Scholar]
- Vahidi, A.; Stefanopoulou, A.; Peng, H. Recursive least squares with forgetting for online estimation of vehicle mass and road grade: Theory and experiments. Veh. Syst. Dyn. 2011, 43, 31–55. [Google Scholar] [CrossRef]
- George, J.; Mani, G. A Portrayal of Sliding Mode Control through Adaptive Neuro Fuzzy Inference System with Optimization Perspective. IEEE Access 2024, 12, 3222–3239. [Google Scholar] [CrossRef]
- Herman, P. Numerical test of several controllers for underactuated underwater vehicles. Appl. Sci. 2020, 10, 8292. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Unit | Value |
|---|---|---|
| Resistance | ||
| Torque constant | ||
| Motor back-EMF constant | ||
| Rotor inductance | 1.16 | |
| Inertia | 4.6 |
| Parameter | Unit | Value |
|---|---|---|
| Decay rate of the Lyapunov function () | - | 0.0001 |
| Reachability factor (η) | - | 0.0001 |
| Initial value of estimated states () | - | |
| Initial value of covariance () | - | |
| Forgetting factor | - | |
| Lower scale factor threshold ( | - | 0.01 |
| Upper scale factor threshold ( | - | 0.08 |
| Normalized threshold | - | 1.001 |
| Parameter | Unit | Value |
|---|---|---|
| Mass () | 2108 | |
| Wheelbase () | 2.97 | |
| Distance between CG * and front/rear axle () | ||
| Z-axis rotational inertia () | 3170.6 | |
| Estimated cornering stiffness of front/rear wheels () |
| Parameter | Unit | Value |
|---|---|---|
| Decay rate of the Lyapunov function () | - | 1 |
| Reachability factor (η) | - | 0.01 |
| Initial value of estimated states () | - | |
| Initial value of covariance () | - | |
| Forgetting factor | - | |
| Lower scale factor threshold ( | - | 0.03 |
| Upper scale factor threshold ( | - | 0.1 |
| Normalized threshold | - | 1.008 |
| Parameter | Unit | Value |
|---|---|---|
| Decay rate of the Lyapunov function () | - | 1.2 |
| Reachability factor (η) | - | 0.01 |
| Initial value of estimated states () | - | |
| Initial value of estimated states () | - | |
| Initial value of covariance () | ||
| Initial value of covariance () | ||
| Forgetting factor | - | |
| Forgetting factor | - | |
| Lower scale factor threshold ( | - | 0.03 |
| Upper scale factor threshold ( | - | 0.1 |
| Normalized threshold | - | 1.008 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
La, H.; Oh, K. Development of a Universal Adaptive Control Algorithm for an Unknown MIMO System Using Recursive Least Squares and Parameter Self-Tuning. Actuators 2024, 13, 167. https://doi.org/10.3390/act13050167
La H, Oh K. Development of a Universal Adaptive Control Algorithm for an Unknown MIMO System Using Recursive Least Squares and Parameter Self-Tuning. Actuators. 2024; 13(5):167. https://doi.org/10.3390/act13050167
Chicago/Turabian StyleLa, Hanbyeol, and Kwangseok Oh. 2024. "Development of a Universal Adaptive Control Algorithm for an Unknown MIMO System Using Recursive Least Squares and Parameter Self-Tuning" Actuators 13, no. 5: 167. https://doi.org/10.3390/act13050167
APA StyleLa, H., & Oh, K. (2024). Development of a Universal Adaptive Control Algorithm for an Unknown MIMO System Using Recursive Least Squares and Parameter Self-Tuning. Actuators, 13(5), 167. https://doi.org/10.3390/act13050167