
Properties Analysis of Hydraulic PTO Output Fluctuation Regulating Based on Accumulator


Abstract
:1. Introduction
2. Analysis of Pressure Fluctuations in the Hydraulic PTO
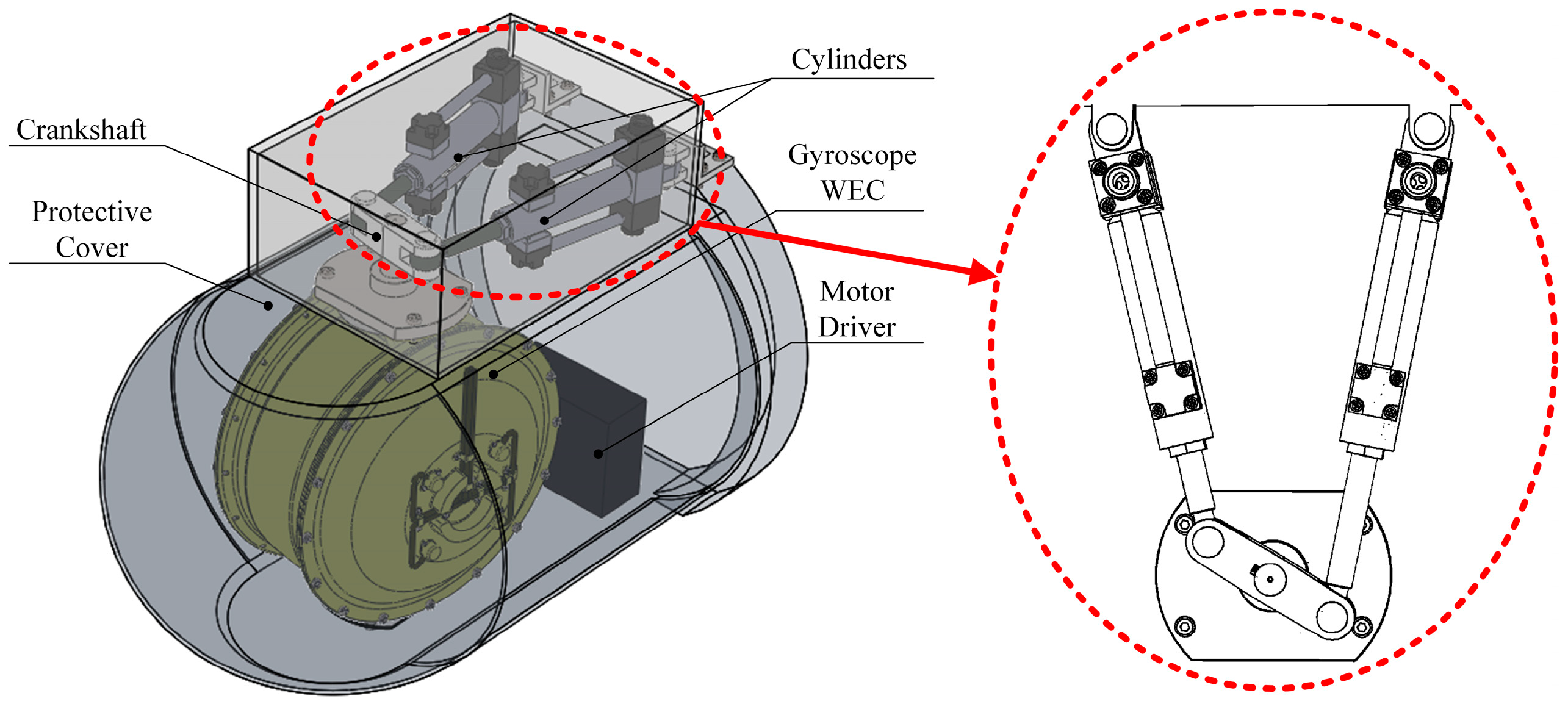
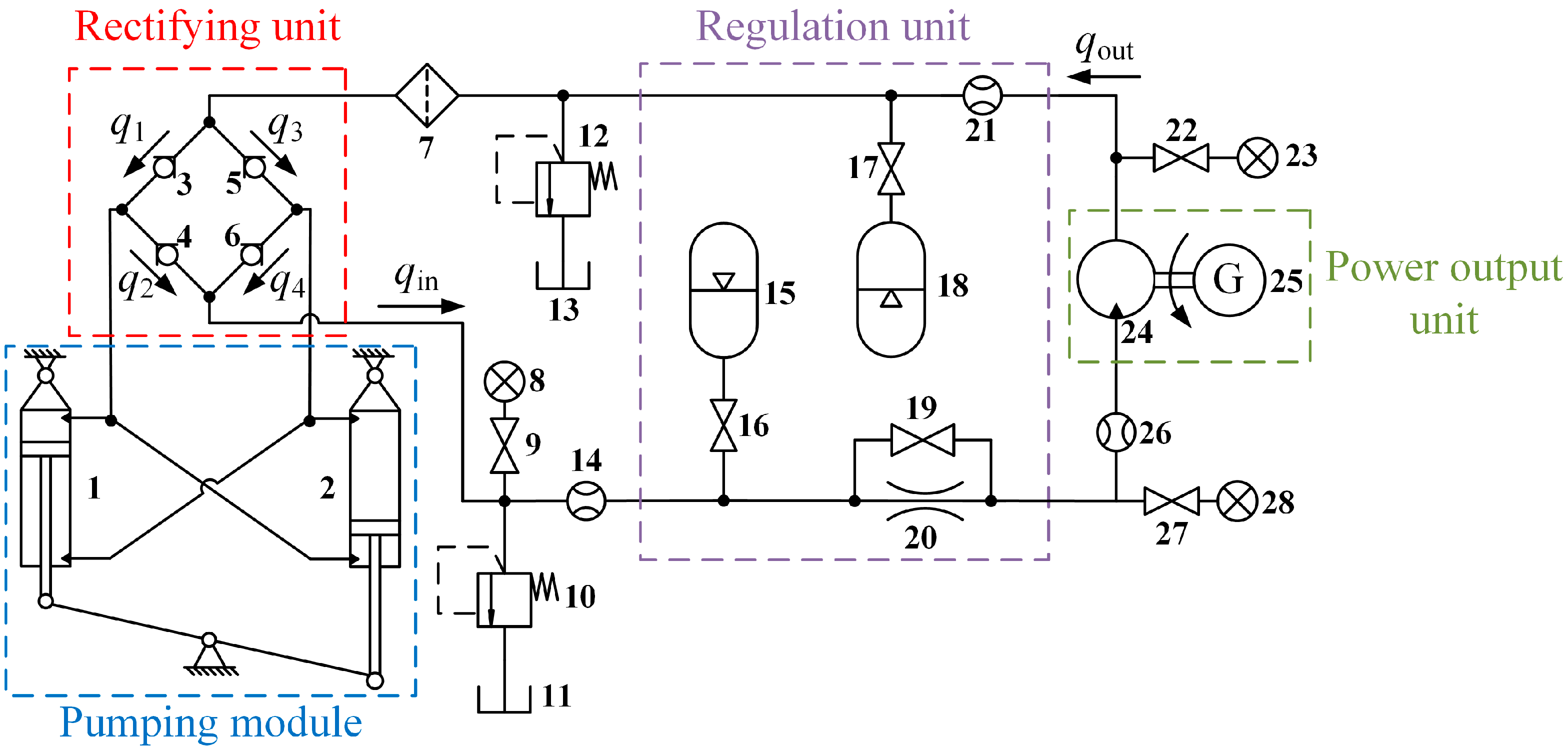
2.1. General Description of the Hydraulic PTO System
2.2. Pressure Fluctuations in the Hydraulic Circuit
3. Modeling and Analysis of Pressure Fluctuations
4. Numerical Calculation and Simulation Verification
4.1. Validation of the Time-Domain Model for the Hydraulic PTO System
4.2. Analysis of Factors Affecting the Transmission Performance of Hydraulic PTO Systems
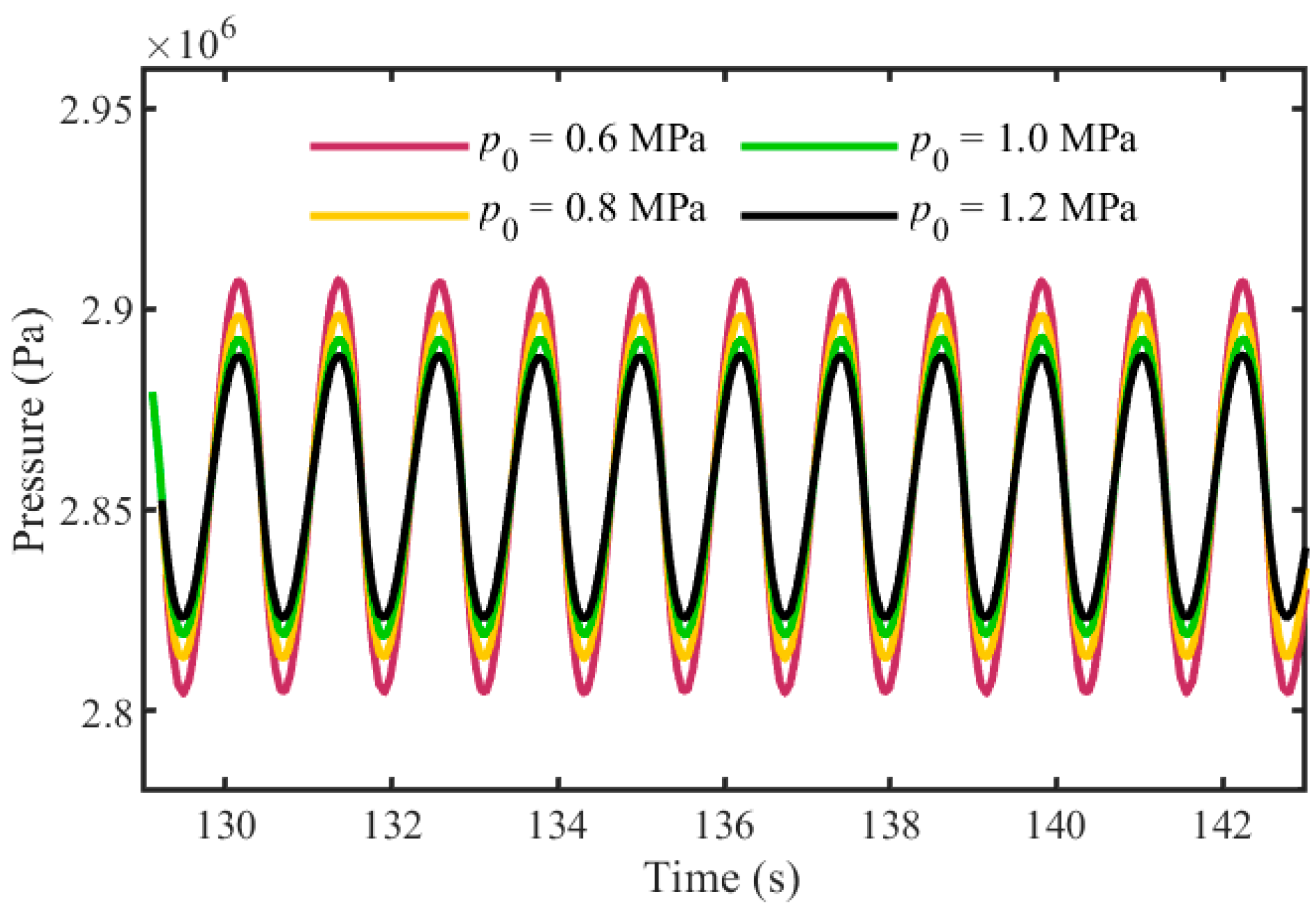
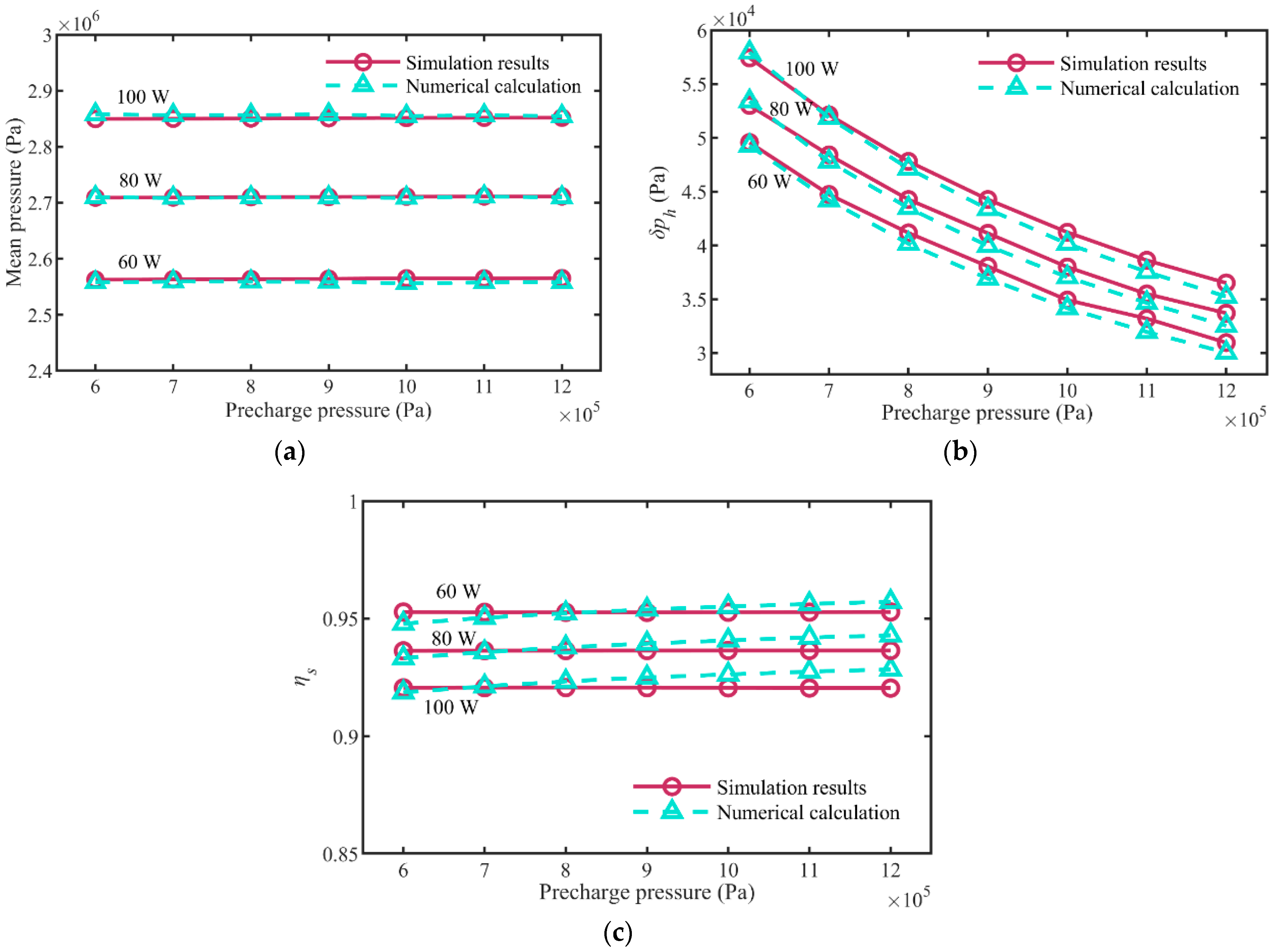
4.2.1. Influence of Pre-Charging Pressure of the Accumulator on Hydraulic PTO System
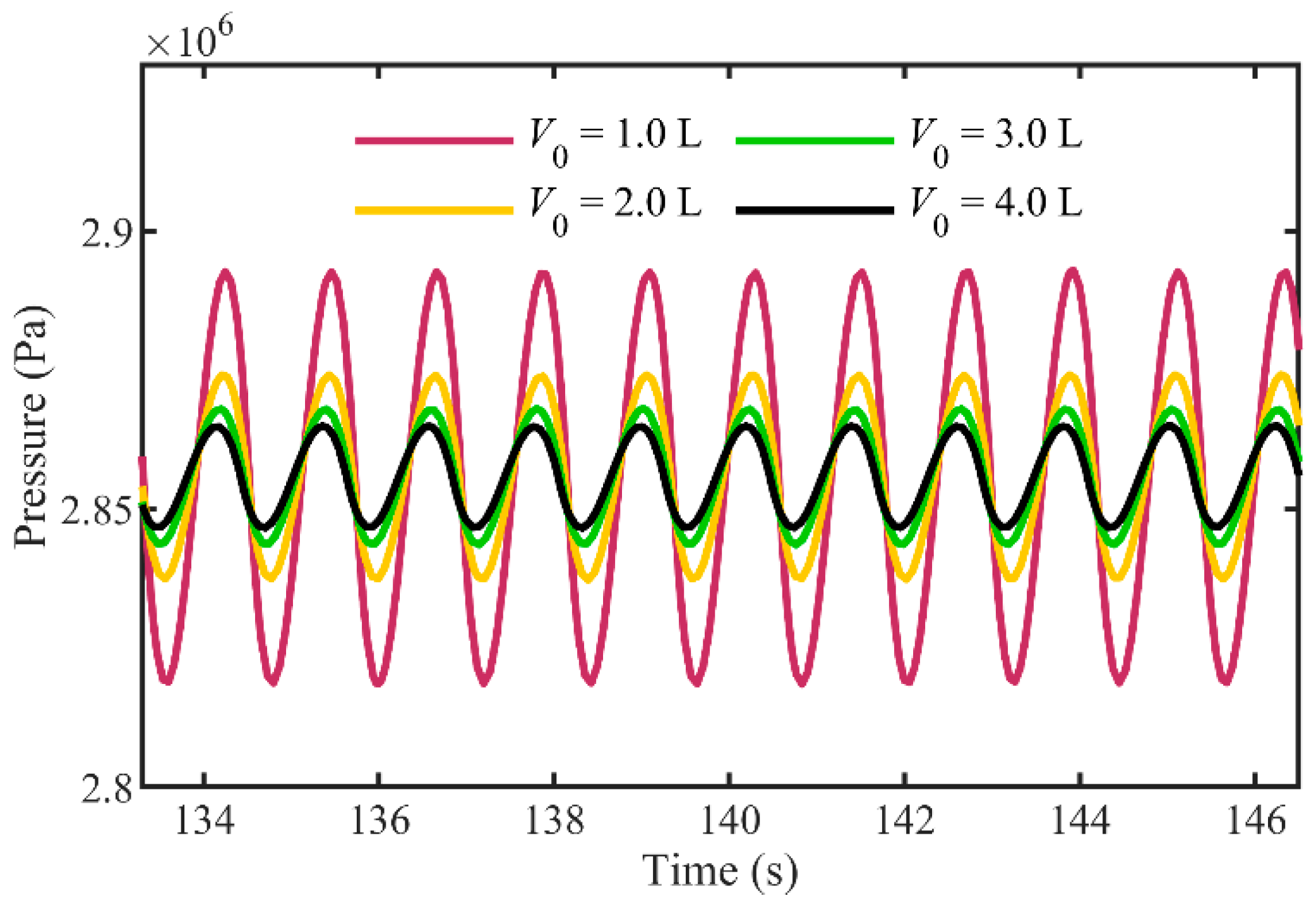
4.2.2. Influence of Volume of the Accumulator on Hydraulic PTO System
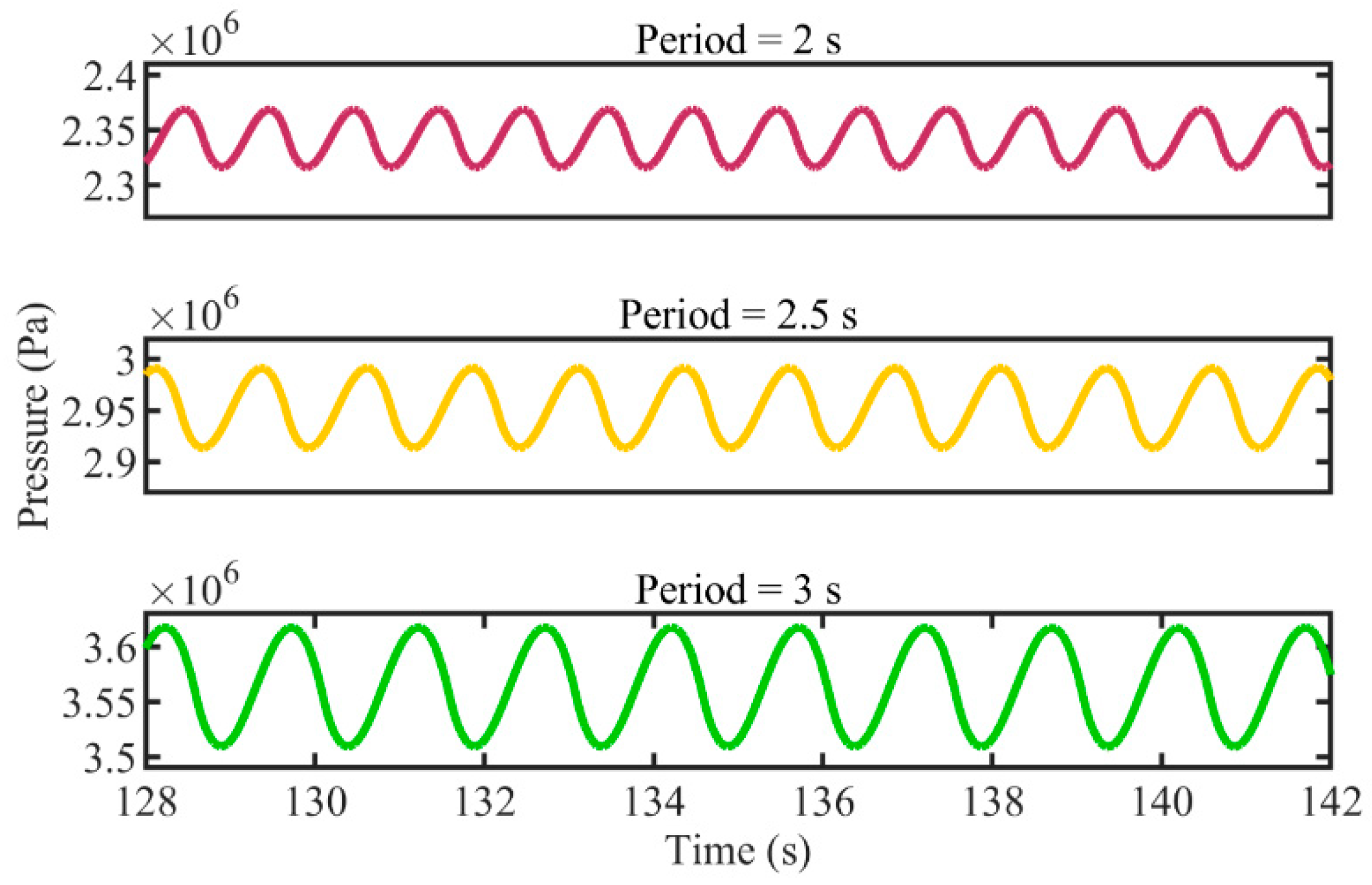
4.2.3. Influence of Period of Input Wave Power on Hydraulic PTO System
5. Conclusions
- (1)
- The compositions and operating principle of the novel hydraulic PTO system with a double-acting hydraulic pump and accumulators are explained. The pressure and flow fluctuation smoothing effect and energy compensation mechanism of the new hydraulic PTO system are analyzed.
- (2)
- A sub-division analysis method for pressure fluctuation compensation of a hydraulic PTO system is proposed. The mathematical model describing the dynamic process of the accumulator smoothing the pressure fluctuation in a hydraulic PTO system is established based on the sub-division principle. The interaction relation between the energy output and the accumulator operating parameters in a hydraulic PTO system is obtained.
- (3)
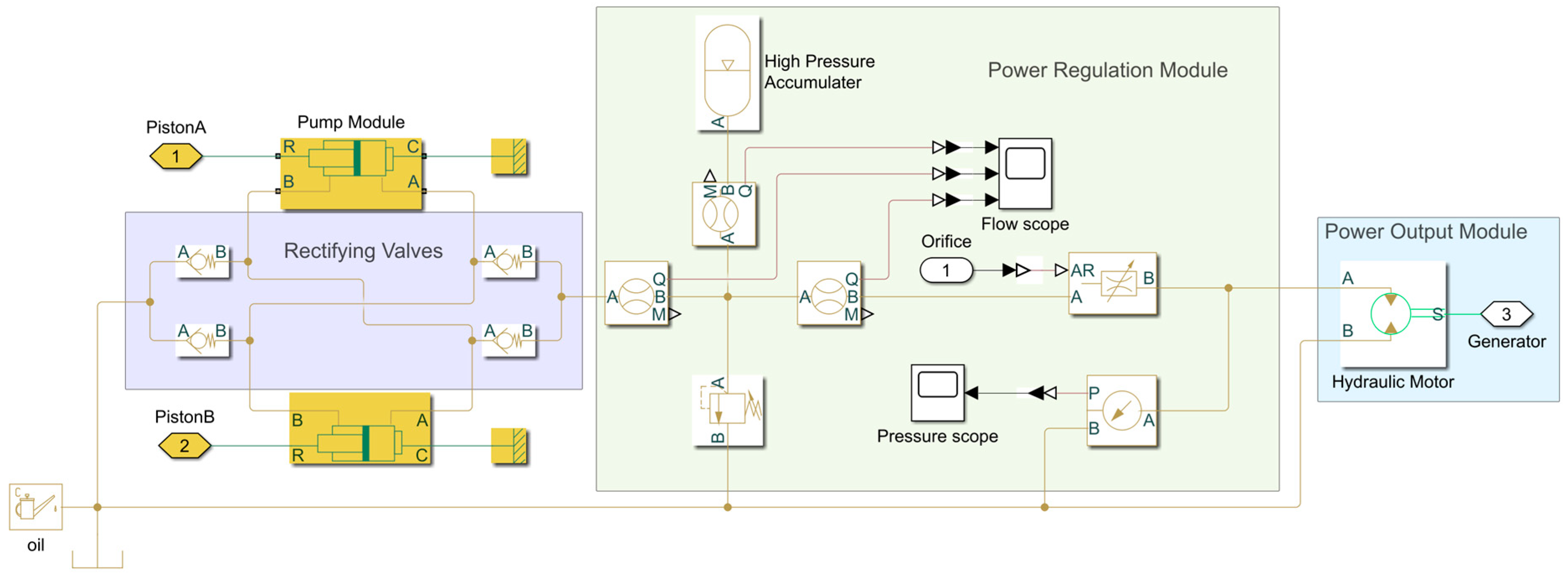
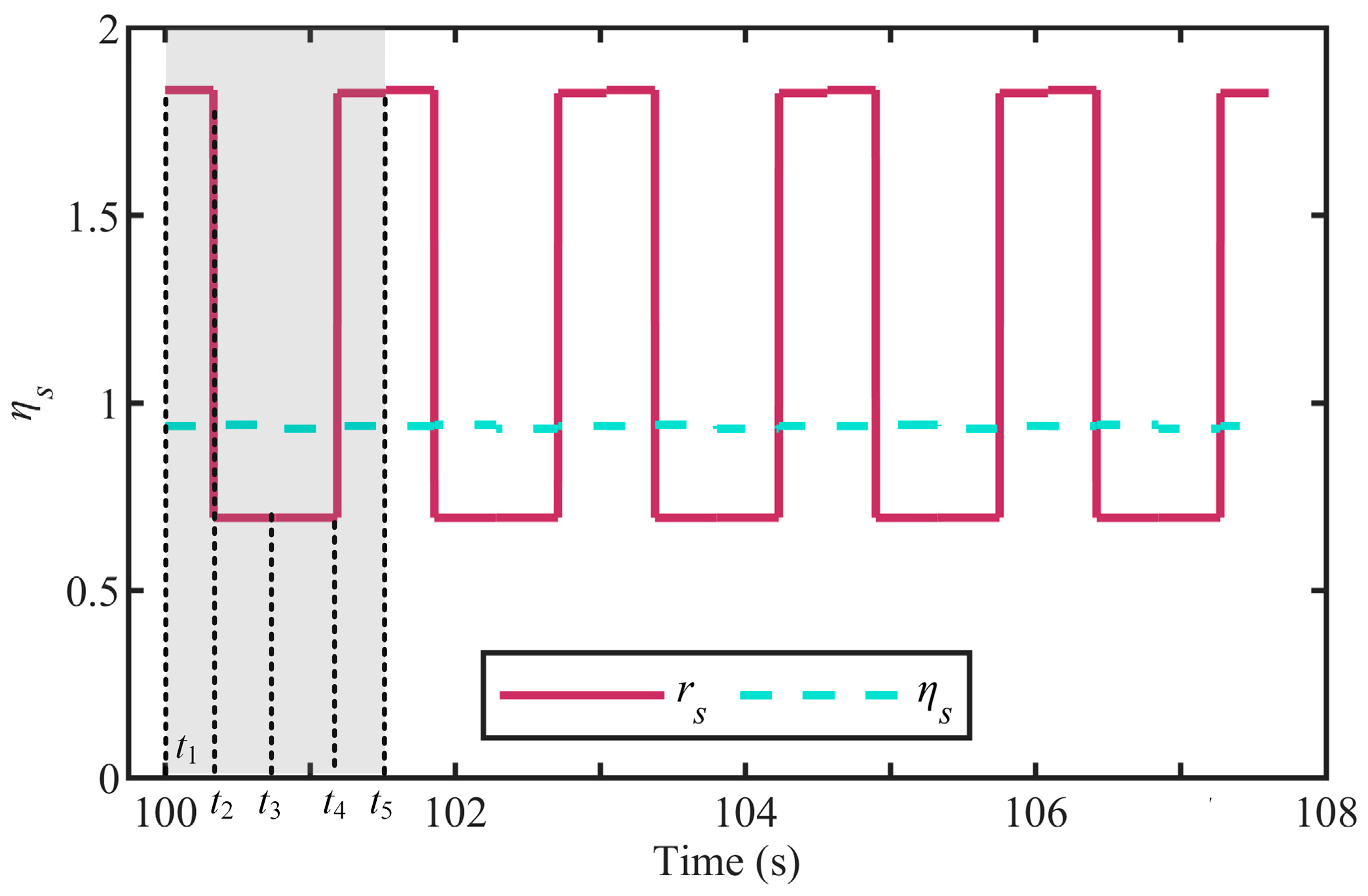
- Based on the mathematical model of energy compensation hydraulic PTO system by means of the sub-division principle, the MATLAB/Simulink simulation model used for analyzing the accumulator compensation hydraulic PTO system is established. The numerical results and MATLAB simulation results of the hydraulic PTO system with accumulator compensation can be mutually verified. It is concluded that the energy transfer efficiency of the hydraulic system with fine compensation of the accumulator in each sub-process is above 90%.
- (4)
- The main factors affecting the output performance of the hydraulic PTO system are analyzed. The results show that the pressure fluctuation amplitude in the hydraulic circuit is negatively correlated with the accumulator pre-charge pressure p0, is negatively correlated with the accumulator volume V0, and is positively correlated with the operating period of the hydraulic pump. To achieve the desired effect of pressure fluctuation compensation, it is necessary to reasonably design the pressure fluctuation amplitude, the accumulator volume, and the parameters of the hydraulic PTO system.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Melikoglu, M. Current status and future of ocean energy sources: A global review. Ocean Eng. 2018, 148, 563–573. [Google Scholar] [CrossRef]
- Penalba, M.; Ringwood, J.V. A Review of Wave-to-Wire Models for Wave Energy Converters. Energies 2016, 97, 506. [Google Scholar] [CrossRef]
- Falcão, A.F.O. Wave energy utilization: A review of the technologies. Renew. Sustain. Energy Rev. 2010, 14, 899–918. [Google Scholar] [CrossRef]
- Rusu, E.; Onea, F. A review of the technologies for wave energy extraction. Clean Energy 2018, 2, 10–19. [Google Scholar] [CrossRef]
- Lasa, J.; Antolin, J.C.; Angulo, C.; Estensoro, P.; Santos, M.; Ricci, P. Design, Construction and Testing of a Hydraulic Power Take-Off for Wave Energy Converters. Energies 2012, 5, 2030–2052. [Google Scholar] [CrossRef]
- Liu, Z.; Shi, H.; Cui, Y.; Kim, K. Experimental study on overtopping performance of a circular ramp wave energy converter. Renew. Energy 2017, 104, 163–176. [Google Scholar] [CrossRef]
- Vicinanza, D.; Di Lauro, E.; Contestabile, P.; Gisonni, C.; Lara, J.L.; Losada, I.J. Review of Innovative Harbor Breakwaters for Wave-Energy Conversion. J. Waterw. Port Coast. Ocean Eng. 2018, 145, 03119001. [Google Scholar] [CrossRef]
- Takao, M.; Setoguchi, T. Air Turbines for Wave Energy Conversion. Int. J. Rotating Mach. 2012, 2012, 717398. [Google Scholar] [CrossRef]
- Henriques, J.C.C.; Gomes, R.P.F.; Gato, L.M.C.; Falcão, A.F.O.; Robles, E.; Ceballos, S. Testing and control of a power take-off system for an oscillating-water-column wave energy converter. Renew. Energy 2016, 85, 714–724. [Google Scholar] [CrossRef]
- Jusoh, M.A.; Ibrahim, M.Z.; Daud, M.Z.; Albani, A.; Yusop, Z.M. Hydraulic Power Take-Off Concepts for Wave Energy Conversion System: A Review. Energies 2019, 1223, 4510. [Google Scholar] [CrossRef]
- Gaspar, J.F.; Calvário, M.; Kamarlouei, M.; Guedes Soares, C. Power take-off concept for wave energy converters based on oil-hydraulic transformer units. Renew. Energy 2016, 86, 1232–1246. [Google Scholar] [CrossRef]
- Yemm, R.; Pizer, D.; Retzler, C.; Henderson, R. Pelamis: Experience from concept to connection. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2012, 370, 365–380. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Yang, Q.; Bao, G. Influence of hydraulic power take-off unit parameters on power capture ability of a two-raft-type wave energy converter. Ocean Eng. 2018, 150, 69–80. [Google Scholar] [CrossRef]
- Hansen, R.H.; Kramer, M.M.; Vidal, E.; Hansen, R.H.; Kramer, M.M.; Vidal, E. Discrete Displacement Hydraulic Power Take-Off System for the Wavestar Wave Energy Converter. Energies 2013, 6, 4001–4044. [Google Scholar] [CrossRef]
- How It Works—Eco Wave Power. Available online: https://www.ecowavepower.com/our-technology/howit-works/ (accessed on 14 June 2024).
- WaveRoller—AW Energy, Oy. Available online: http://aw-energy.com/waveroller/#technology (accessed on 14 June 2024).
- Huang, Q.; Wang, P.; Liu, Y.; Li, B. Modeling and Simulation of Hydraulic Power Take-Off Based on AQWA. Energies 2022, 15, 3918. [Google Scholar] [CrossRef]
- Song, R.; Ming, Y.; Xiaohua, D. Intermittent wave energy generation system with hydraulic energy storage and pressure control for stable power output. J. Mar. Sci. Technol. 2018, 23, 802–813. [Google Scholar] [CrossRef]
- Hansen, A.H.; Asmussen, M.F.; Bech, M.M. Model predictive control of a wave energy converter with discrete fluid power power take-off system. Energies 2018, 11, 635. [Google Scholar] [CrossRef]
- Babarit, A.; Guglielmi, M.; Clément, A.H. Declutching control of a wave energy converter. Ocean Eng. 2009, 36, 1015–1024. [Google Scholar] [CrossRef]
- Hansen, R.H.; Andersen, T.O.; Perdersen, H.C. Analysis of discrete pressure level systems for Wave Energy Converters. In Proceedings of the 2011 International Conference on Fluid Power and Mechatronics, Beijing, China, 17–20 August 2011; pp. 552–558. [Google Scholar]
- Cargo, C.J.; Hillis, A.J.; Plummer, A.R. Optimisation and control of a hydraulic power take-off unit for a wave energy converter in irregular waves. Proc. Inst. Mech. Eng. Part A J. Power Energy 2014, 228, 462–479. [Google Scholar] [CrossRef]
- Jia, H.; Pei, Z.; Tang, Z.; Yang, J. Modeling and Analysis of an Inertia Wave Energy Converter and Its Optimal Design. J. Mar. Sci. Eng. 2023, 117, 1351. [Google Scholar] [CrossRef]
- Zhang, D.; Li, W.; Zhao, H.; Bao, J.; Lin, Y. Design of A Hydraulic Power Take-off System for the Wave Energy Device with An Inverse Pendulum. China Ocean Eng. 2014, 2, 283–292. [Google Scholar] [CrossRef]
- Dießel, D.; Bryans, G.; Verdegem, L.; Murrenhoff, H. Wavepod a transmission for wave energy converters—Set up and testing. Int. J. Fluid Power 2015, 16, 75–82. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Units | Value |
|---|---|---|---|
| Amplitude of piston displacement | X0 | m | 3.0 × 10−2 |
| Area of piston | Ap | m2 | 4.9 × 10−4 |
| Ratio of the area | σ | - | 0.41 |
| Density of fluid | ρ | kg/m3 | 0.8 × 103 |
| Adiabatic index of accumulator | γ | - | 1.4 |
| Displacement of hydraulic motor | - | m3/rev | 1.0 × 10−6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, H.; Pei, Z.; Tang, Z.; Li, M. Properties Analysis of Hydraulic PTO Output Fluctuation Regulating Based on Accumulator. Actuators 2024, 13, 261. https://doi.org/10.3390/act13070261
Jia H, Pei Z, Tang Z, Li M. Properties Analysis of Hydraulic PTO Output Fluctuation Regulating Based on Accumulator. Actuators. 2024; 13(7):261. https://doi.org/10.3390/act13070261
Chicago/Turabian StyleJia, Han, Zhongcai Pei, Zhiyong Tang, and Meng Li. 2024. "Properties Analysis of Hydraulic PTO Output Fluctuation Regulating Based on Accumulator" Actuators 13, no. 7: 261. https://doi.org/10.3390/act13070261
APA StyleJia, H., Pei, Z., Tang, Z., & Li, M. (2024). Properties Analysis of Hydraulic PTO Output Fluctuation Regulating Based on Accumulator. Actuators, 13(7), 261. https://doi.org/10.3390/act13070261