

A Hybrid Three-Finger Gripper for Automated Harvesting of Button Mushrooms

 , ,
, ,  ,
, 
 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
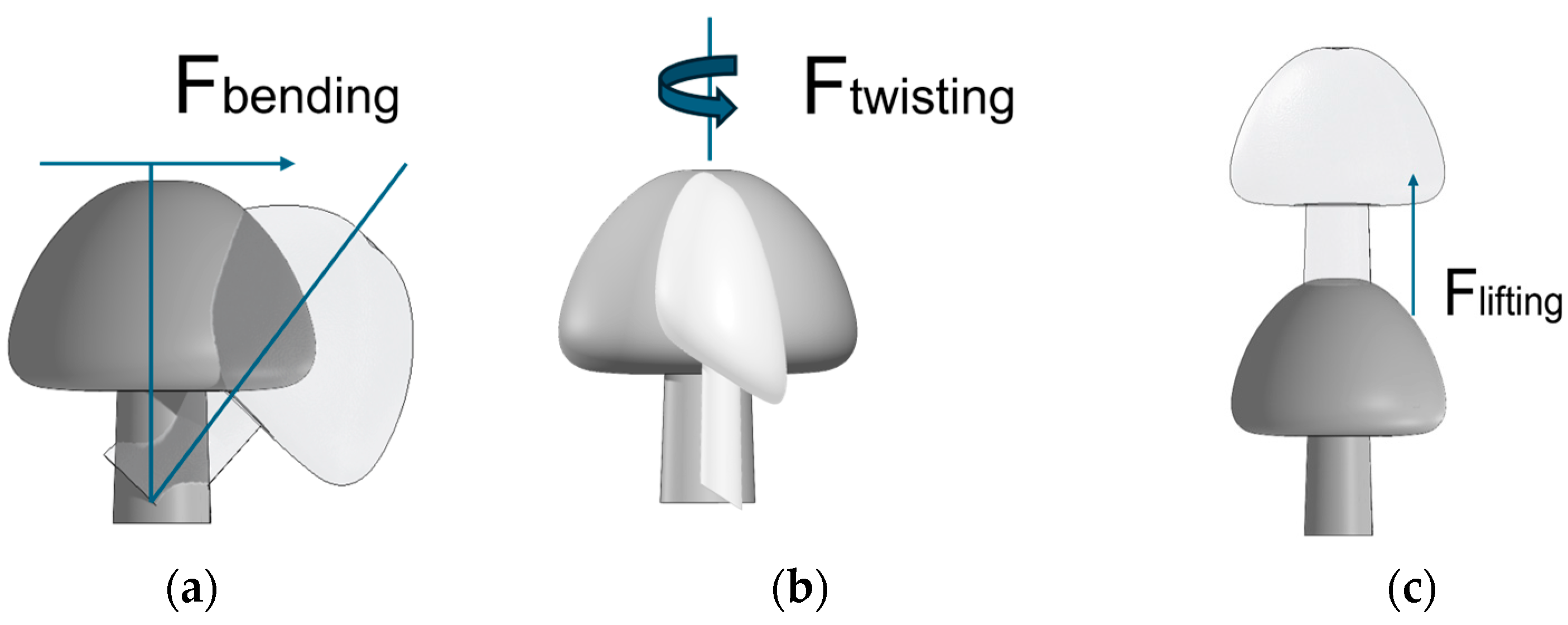
2.1. Analysis of the Mushroom-Picking Mechanism
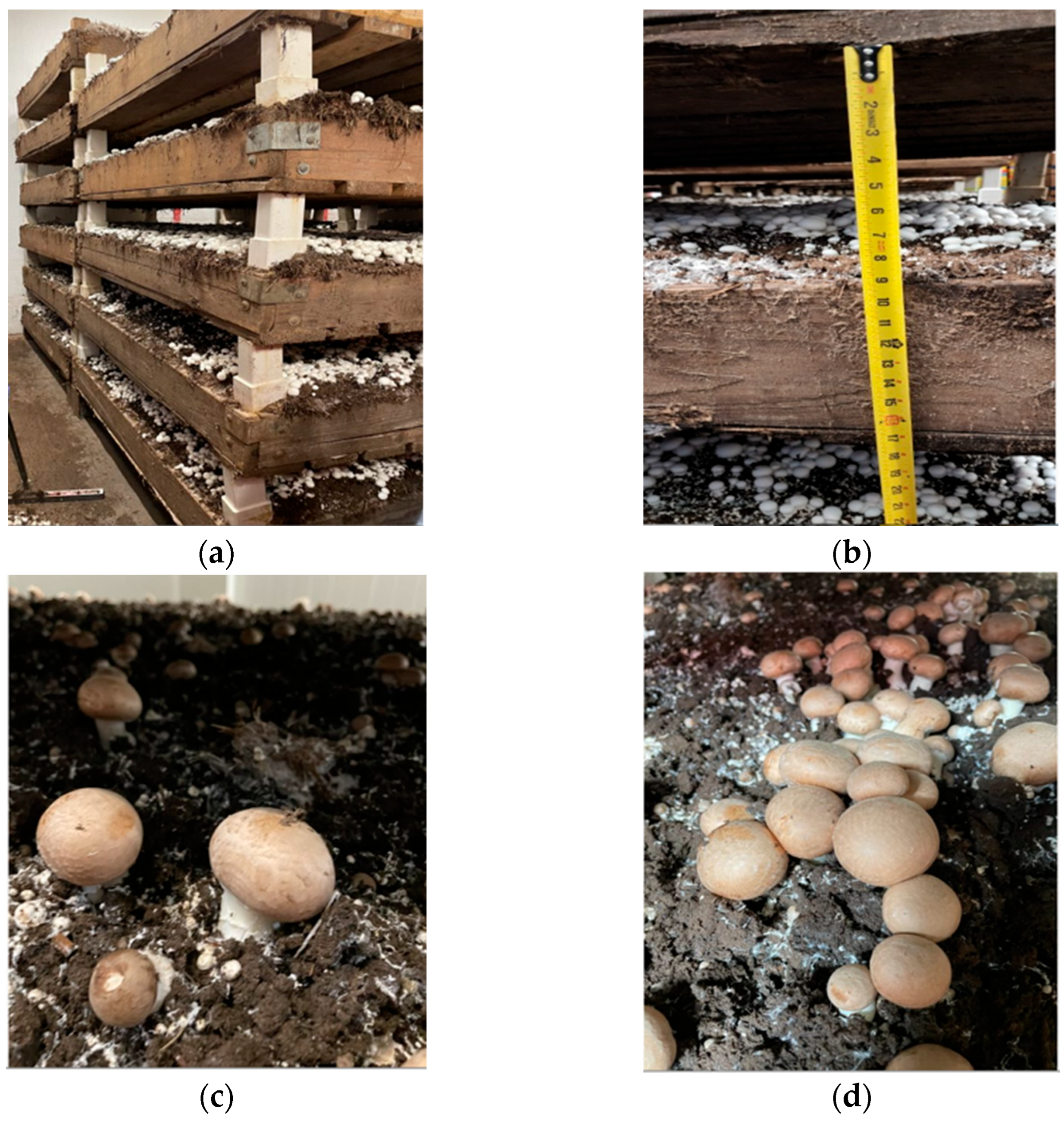
2.2. Mushroom Growing Environment
2.3. Gripper Design
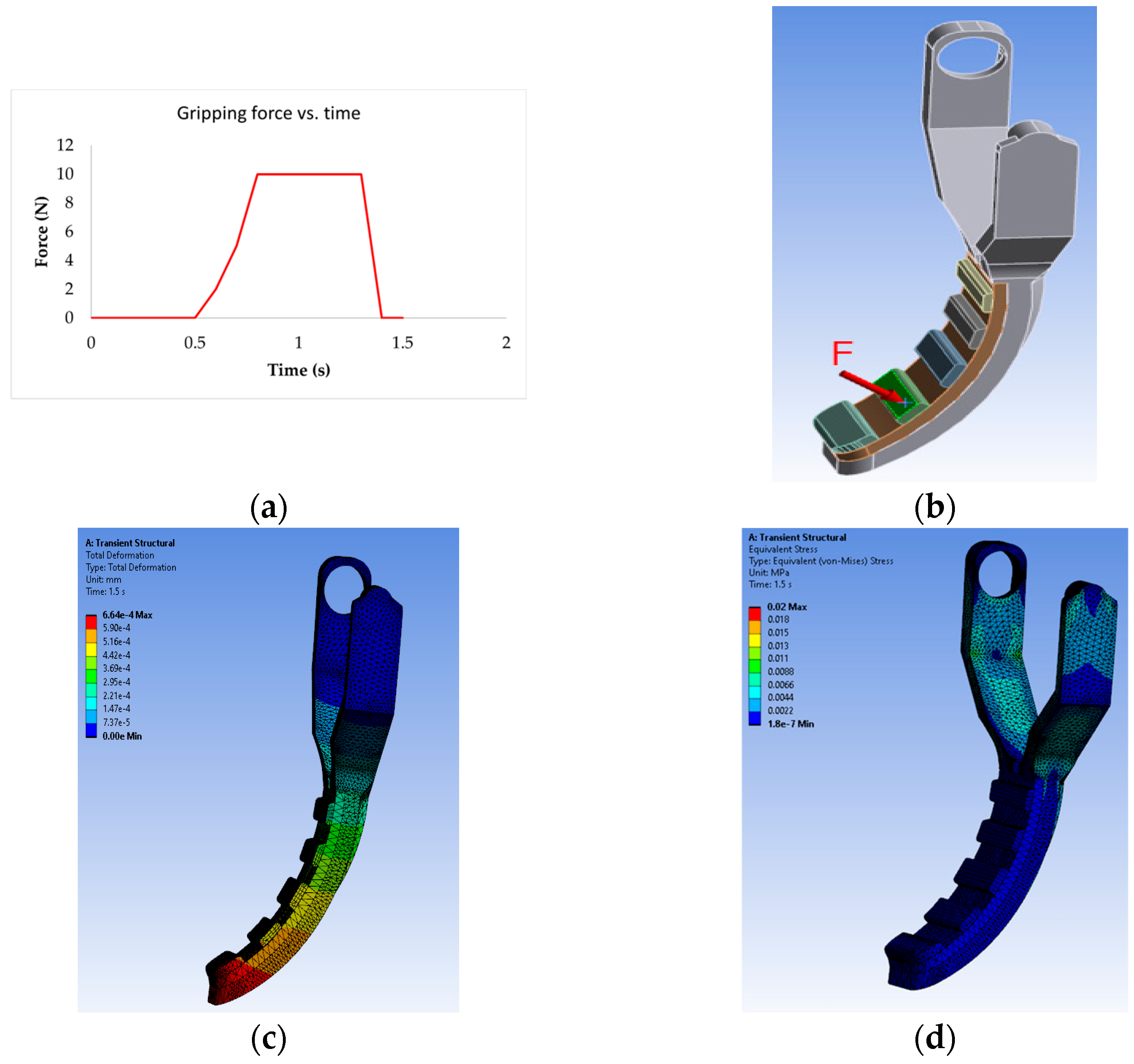
2.4. Gripper Analysis
2.5. Materials and Fabrication Methods
3. Results
3.1. Calculation of Gripping Force F1
3.1.1. Gripping Test with Plain Soft Pads
3.1.2. Gripping Force with Irregular Textured Soft Pads
3.1.3. Mushroom Damage Analysis
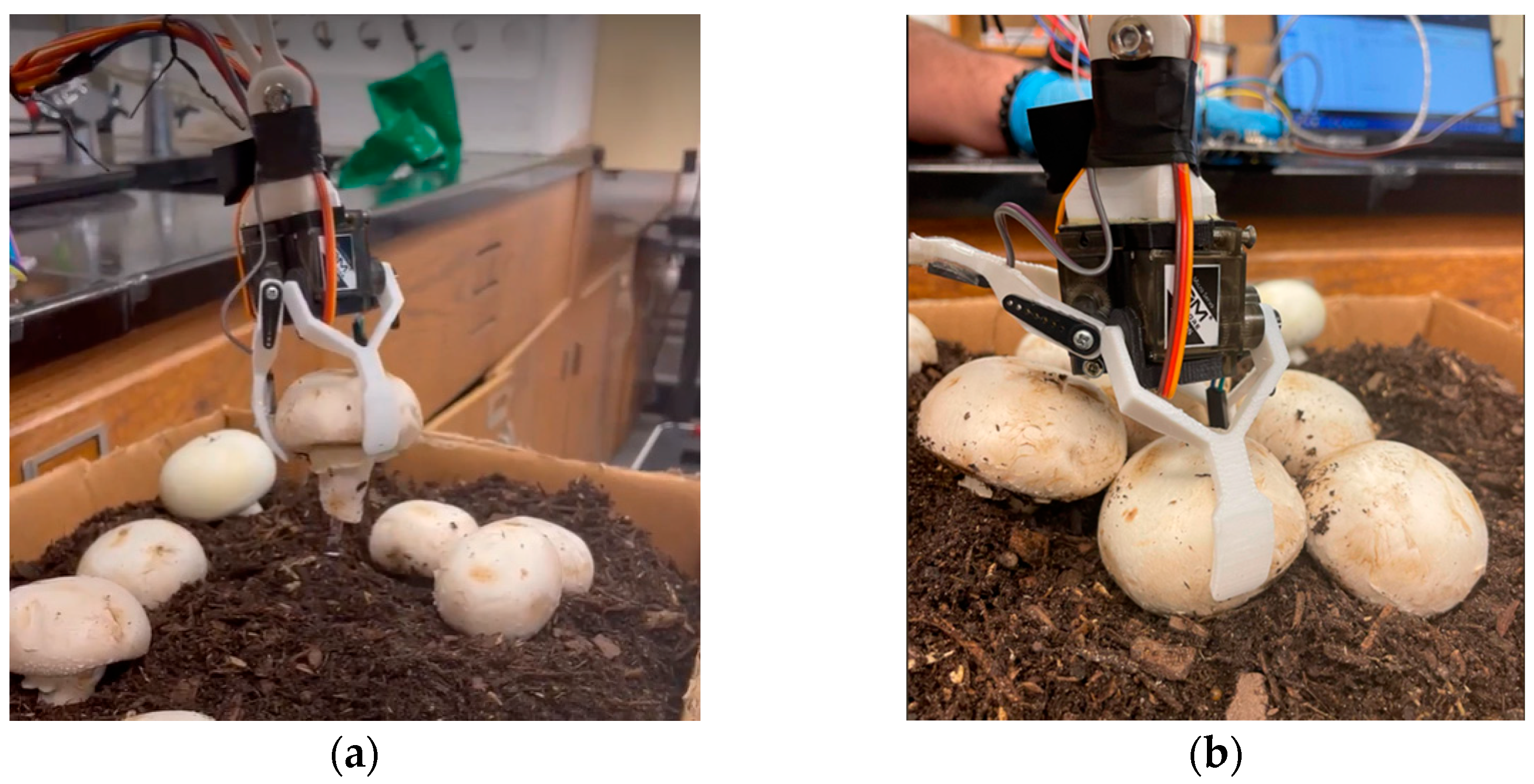
3.2. Harvesting Performance
4. Discussion
5. Conclusions and Future Works
- A compact lightweight gripper, 44 mm in height and 80.2 g in weight, was designed to accommodate the smallest mushroom shelf. A low-cost and fast gripper was presented, which can be used with any type of manipulator.
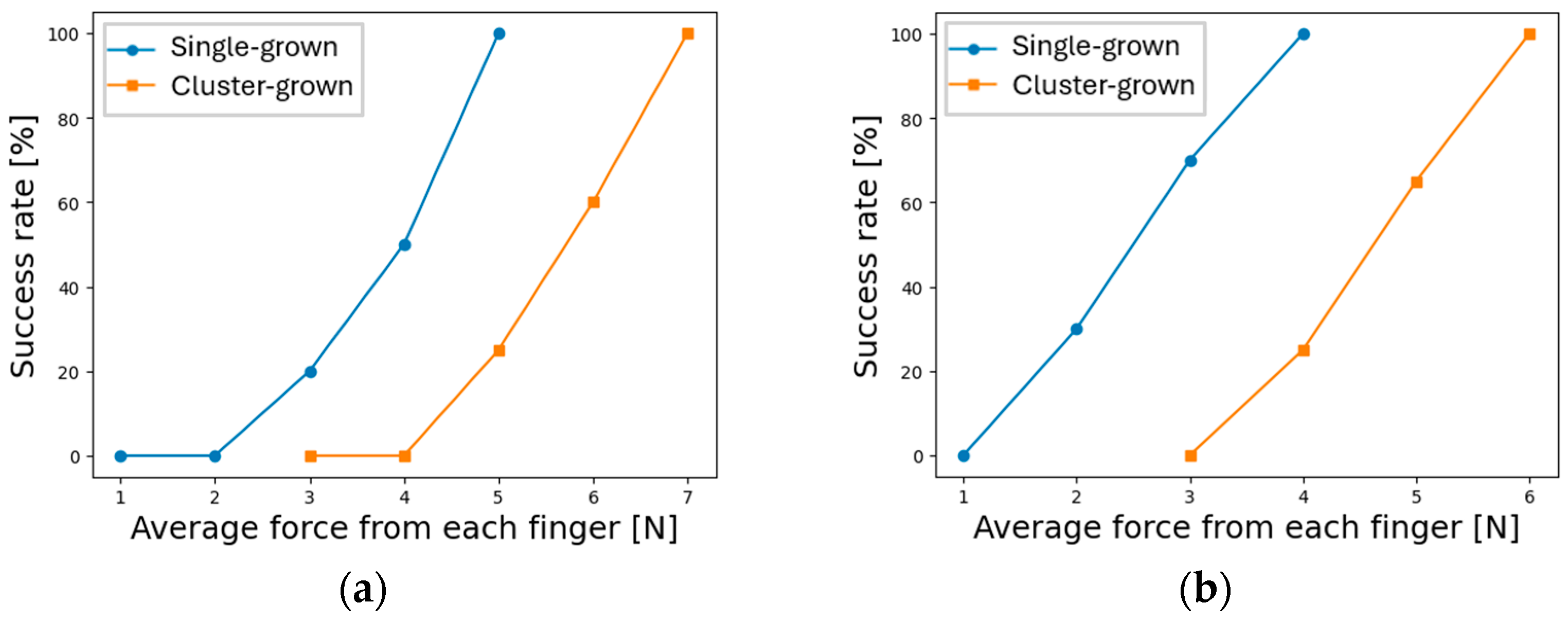
- Compared with plain soft pads, using irregular textured soft pads reduced the gripping force and picking time by 20% for single-grown mushroom picking. For a cluster-grown mushroom, the irregular textured soft pad required 17% less force and was 6.7% faster. A detailed study on soft pads can improve the results further.
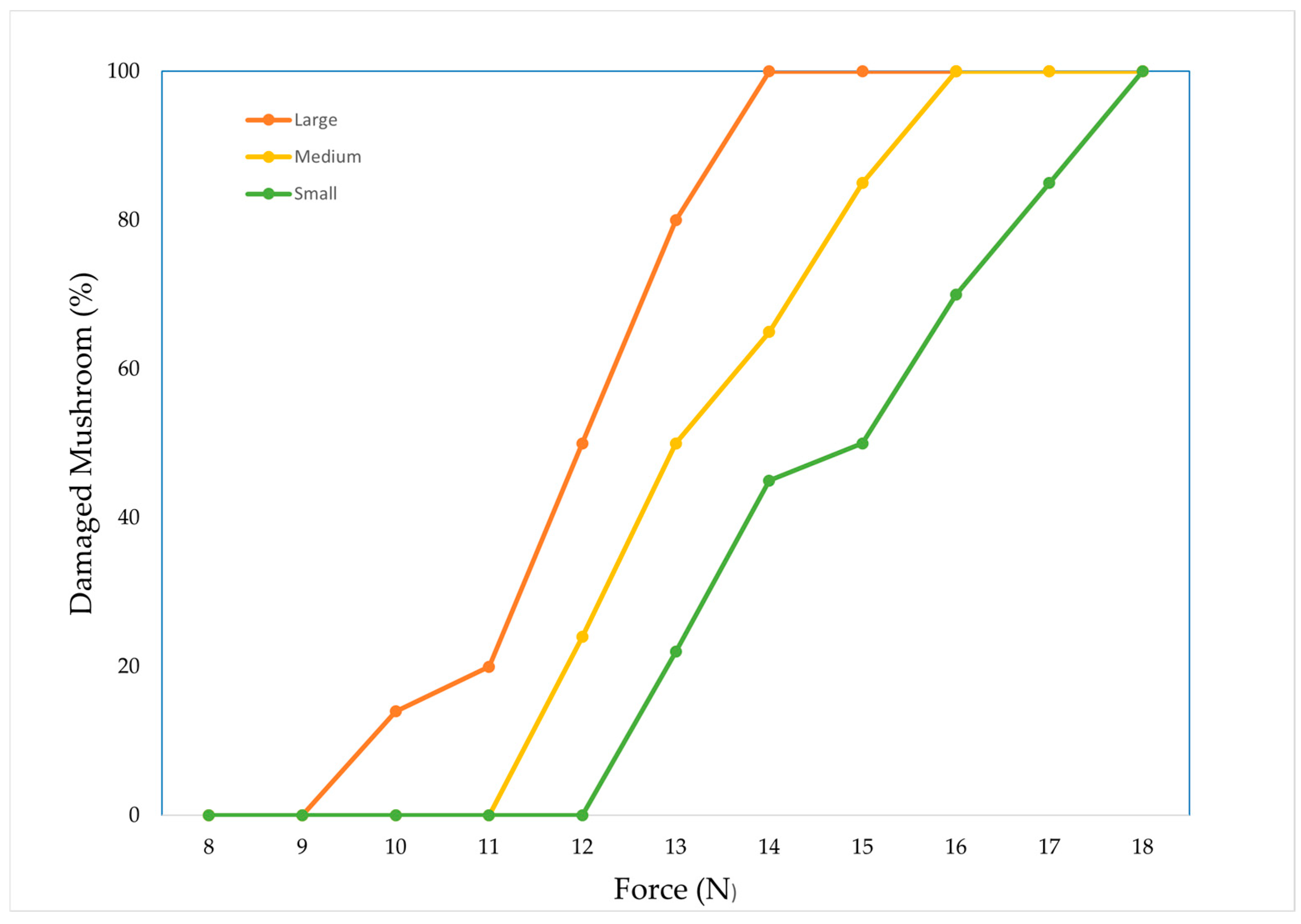
- The gripping force depended on the mushroom’s size and density. A force of more than 10 N damaged larger mushrooms, and the safe force to pick both single and cluster mushrooms was 6 N with irregular textured soft pads. An impressive 100% success rate with 0 damage was recorded for single-grown mushrooms. For cluster-grown mushrooms, even with the safe force, a significant damage rate of 36% was observed.
- For cluster mushroom picking, only two fingers were used when the space was limited. Although the total picking force for cluster mushrooms was less than for single-grown mushrooms, the damage rate was significant, which calls for further improvement.
- The gripper performance with bending and twisting mechanisms was not studied. The picking performance on mushrooms aligned at an angle besides vertical was also not considered. Furthermore, mushroom picking along with the stem was not performed. These works will be explored in the future.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- El-Ramady, H.; Abdalla, N.; Badgar, K.; Llanaj, X.; Törős, G.; Hajdú, P.; Eid, Y.; Prokisch, J. Edible Mushrooms for Sustainable and Healthy Human Food: Nutritional and Medicinal Attributes. Sustainability 2022, 14, 4941. [Google Scholar] [CrossRef]
- Banerjee, D.K.; Das, A.K.; Banerjee, R.; Pateiro, M.; Nanda, P.K.; Gadekar, Y.P.; Biswas, S.; McClements, D.J.; Lorenzo, J.M. Application of Enoki Mushroom (Flammulina Velutipes) Stem Wastes as Functional Ingredients in Goat Meat Nuggets. Foods 2020, 9, 432. [Google Scholar] [CrossRef] [PubMed]
- Ibrahim, S.; Huda-Faujan, H.S. Potential Use of Underutilised Mushroom Stems in Meat Products and Meat Analogues: A Mini Review. Malays. J. Sci. Health Technol. 2023, 9, 147–152. [Google Scholar] [CrossRef]
- Global Market Insights White Mushroom Market Size. Available online: https://www.gminsights.com/industry-analysis/white-mushroom-market (accessed on 12 June 2024).
- Rajendran, V.; Debnath, B.; Mghames, S.; Mandil, W.; Parsa, S.; Parsons, S.; Amir, G.-E. Towards Autonomous Selective Harvesting: A Review of Robot Perception, Robot Design, Motion Planning and Control. J. Field Robot. 2023, 1–33. [Google Scholar] [CrossRef]
- Galley, A.; Knopf, G.K.; Kashkoush, M. Pneumatic Hyperelastic Actuators for Grasping Curved Organic Objects. Actuators 2019, 8, 76. [Google Scholar] [CrossRef]
- Bachche, S. Deliberation on Design Strategies of Automatic Harvesting Systems: A Survey. Robotics 2015, 4, 194–222. [Google Scholar] [CrossRef]
- Recchia, A.; Strelkova, D.; Urbanic, J.; Kim, E.; Anwar, A.; Murugan, A.S. A Prototype Pick and Place Solution for Harvesting White Button Mushrooms Using a Collaborative Robot. Robot. Rep. 2023, 1, 67–81. [Google Scholar] [CrossRef]
- Mycionics Inc. System and Method for Autonomous Harvesting of Mushrooms. U.S. Patent 11,154,010, 26 October 2021. [Google Scholar]
- Huang, M.; He, L.; Choi, D.; Pecchia, J.; Li, Y. Picking Dynamic Analysis for Robotic Harvesting of Agaricus Bisporus Mushrooms. Comput. Electron. Agric. 2021, 185, 106145. [Google Scholar] [CrossRef]
- Huang, M.; Jiang, X.; He, L.; Choi, D.; Pecchia, J.; Li, Y. Development of a Robotic Harvesting Mechanism for Button Mushrooms. Trans. ASABE 2021, 64, 565–575. [Google Scholar] [CrossRef]
- Yang, S.; Ji, J.; Cai, H.; Chen, H. Modeling and Force Analysis of a Harvesting Robot for Button Mushrooms. IEEE Access 2022, 10, 78519–78526. [Google Scholar] [CrossRef]
- Zhao, K.; Li, H.; Ji, J.; Li, Q.; Li, M.; He, Y.; Li, J.; Xing, S. Pressure-Stabilized Flexible End-Effector for Selective Picking of Agaricus Bisporus. Agriculture 2023, 13, 2256. [Google Scholar] [CrossRef]
- Rowley, J. Developing Flexible Automation for Mushroom Harvesting (Agaricus Bisporus): Innovation Report. Ph.D. Thesis, University of Warwick, Coventry, UK, 2009. [Google Scholar]
- Mbakop, S.; Tagne, G.; Lagache, A.; Youcef-Toumi, K.; Merzouki, R. Integrated Design of a Bio-Inspired Soft Gripper for Mushrooms Harvesting. In Proceedings of the 2023 IEEE International Conference on Soft Robotics, RoboSoft 2023, Singapore, 3–7 April 2023. [Google Scholar]
- Li, J.; Feng, Q.; Ru, M.; Sun, J.; Guo, X.; Zheng, W. Design of Shiitake Mushroom Robotic Picking Grasper: Considering Stipe Compressive Stress Relaxation. Machines 2024, 12, 241. [Google Scholar] [CrossRef]
- Mbakop, S.; Tagne, G.; Frouin, M.H.; Achille, M.; Merzouki, R. Inverse Dynamics Model-Based Shape Control of Soft Continuum Finger Robot Using Parametric Curve. IEEE Robot. Autom. Lett. 2021, 6, 8053–8060. [Google Scholar] [CrossRef]
- Porichis, A.; Vasios, K.; Iglezou, M.; Mohan, V.; Chatzakos, P. Visual Imitation Learning for Robotic Fresh Mushroom Harvesting. In Proceedings of the 2023 31st Mediterranean Conference on Control and Automation, MED 2023, Limassol, Cyprus, 26–29 June 2023; pp. 535–540. [Google Scholar]
- Tao, K.; Wang, Z.; Yuan, J.; Liu, X. Design of a Novel End-Effector for Robotic Bud Thinning of Agaricus Bisporus Mushrooms. Comput. Electron. Agric. 2023, 210, 107880. [Google Scholar] [CrossRef]
- Gaweł, A.; Kuciel, S.; Liber-Kneć, A.; Mierzwiński, D. Examination of Low-Cyclic Fatigue Tests and Poisson’s Ratio Depending on the Different Infill Density of Polylactide (PLA) Produced by the Fused Deposition Modeling Method. Polymers 2023, 15, 1651. [Google Scholar] [CrossRef] [PubMed]
- MatWeb Overview of Materials for Polylactic Acid (PLA) Biopolymer. Available online: https://www.matweb.com/search/DataSheet.aspx?MatGUID=ab96a4c0655c4018a8785ac4031b9278 (accessed on 9 July 2024).
- MatWeb Overview of Materials for Silicone Rubber. Available online: https://www.matweb.com/search/DataSheet.aspx?MatGUID=cbe7a469897a47eda563816c86a73520&ckck=1 (accessed on 9 July 2024).
- Amazon Miuzei MG90S 9G Micro Servo Motor Metal Geared Motor Kit for RC Car Robot Helicopter, Mini Servos for Arduino Project. Available online: https://www.amazon.com/Miuzei-Geared-Helicopter-Arduino-Project/dp/B0CP98TZJ2?th=1 (accessed on 12 June 2024).
- Amazon Smooth-On Ecoflex 00-50 Platinum Silicone 2 Lb Kit. Available online: https://www.amazon.com/Smooth-Ecoflex-00-50-Platinum-Silicone/dp/B00GJ80HIC (accessed on 12 June 2024).
- Amazon Thin Film Pressure Sensor 20 g–2 Kg DF9-16 High Precise Force Sensitive Resistor Force Sensor Pressure Sensor Resistance Type Thin Film Pressure Sensor Force Sensing Resistor. Available online: https://www.amazon.com/Pressure-Precise-Force-Sensitive-Resistor-Resistance-type/dp/B07T1CHY58 (accessed on 12 June 2024).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Density [g/cc] | Tensile Yield Strength [MPa] | Modulus of Elasticity [GPa] | Poisson’s Ratio |
|---|---|---|---|---|
| Polylactic acid (PLA) [20,21] | 1.3 | 15.4 | 2.1 | 0.35 |
| Silicone rubber [22] | 1.23 | 10.4 | 0.0167 | 0.47 |
| Parts | Weight (gm) | Cost (USD) |
|---|---|---|
| Motor housing | 11.2 | 0.22 |
| Servo motors | 41*3 | 8.2 |
| Fingers | 4.2*3 | 0.25 |
| Soft pads | 0.8*3 | 0.1 |
| Force sensors | - | 12.5 |
| Total | 164.2 | 21.27 |
| Soft Pad Type | Single-Grown | Cluster-Grown | ||||
|---|---|---|---|---|---|---|
| Gripping Force [N] | Picking Time [s] | Damage Rate [%] | Gripping Force [N] | Picking Time [s] | Damage Rate [%] | |
| Plain | 5 | 1.5 | 0 | 7 | 3 | 40 |
| Irregular textured | 4 | 1.2 | 0 | 6 | 2.8 | 36 |
| End Effector Types | Authors [Ref] | Gripping Force (Pressure) [N/KPa] | Picking Time [s] | Success Rate | ||
|---|---|---|---|---|---|---|
| Single-Grown [%] | Cluster-Grown [%] | |||||
| Conventional hand picking | Huang et al. [10] | 4 N | 3 s | 100 | 100 | |
| Huang et al. [10] | 172 KPa | 1.7 | 100 | - | ||
| Vacuum suction | Yang et al. [12] | 9.3 N | 3.5 | 88.2 | - | |
| Zhao et al. [13] | 9.2 KPa | - | 98.5 | - | ||
| Soft gripper | Mbakop et al. [15] | 1 N | 3 | 85 | - | |
| Closed gripper | Galley et al. [6] | 18 N | - | - | - | |
| Recchia et al. [8] | 3 N | - | - | - | ||
| Three-finger gripper | This work | 6 N | 1.2 | 100 | 64 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koirala, B.; Kafle, A.; Nguyen, H.C.; Kang, J.; Zakeri, A.; Balan, V.; Merchant, F.; Benhaddou, D.; Zhu, W. A Hybrid Three-Finger Gripper for Automated Harvesting of Button Mushrooms. Actuators 2024, 13, 287. https://doi.org/10.3390/act13080287
Koirala B, Kafle A, Nguyen HC, Kang J, Zakeri A, Balan V, Merchant F, Benhaddou D, Zhu W. A Hybrid Three-Finger Gripper for Automated Harvesting of Button Mushrooms. Actuators. 2024; 13(8):287. https://doi.org/10.3390/act13080287
Chicago/Turabian StyleKoirala, Bikram, Abishek Kafle, Huy Canh Nguyen, Jiming Kang, Abdollah Zakeri, Venkatesh Balan, Fatima Merchant, Driss Benhaddou, and Weihang Zhu. 2024. "A Hybrid Three-Finger Gripper for Automated Harvesting of Button Mushrooms" Actuators 13, no. 8: 287. https://doi.org/10.3390/act13080287
APA StyleKoirala, B., Kafle, A., Nguyen, H. C., Kang, J., Zakeri, A., Balan, V., Merchant, F., Benhaddou, D., & Zhu, W. (2024). A Hybrid Three-Finger Gripper for Automated Harvesting of Button Mushrooms. Actuators, 13(8), 287. https://doi.org/10.3390/act13080287