
The Challenges of Piezoelectric Actuators and Motors Application in a Space Environment

Abstract
:1. Introduction
2. Physical Properties of Space Beyond the Earth’s Atmosphere

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Orbit Type | Temperature Variations | Radiation Levels | Vacuum Levels | Electromagnetic Conditions | Microgravity Effects |
|---|---|---|---|---|---|
| LEO | −170 °C to +123 °C | Average 0.1 to 1 mSv per day | 10−9 to 10−11 Torr | Average magnetic field strength: ~25 to 65 µT; Electric field strength: ~1 to 10 mV/m; Magnetic field fluctuations: ~10 to 100 nT. | Atomic oxygen exposure: up to 0.01 mm per year; Total ionizing dose: up to 2000 rads/year. |
| MEO | −130 °C to +100 °C | Average 0.5 to 5 mSv per day | 10−10 to 10−12 Torr | Average magnetic field strength: ~5 to 25 µT; Electric field strength: ~1 to 10 mV/m; Magnetic field fluctuations: ~10 to 100 nT. | Atomic oxygen exposure: negligible; Total ionizing dose: up to 10,000 rads/year. |
| GEO | −180 °C to +125 °C | Average 1 to 10 mSv per day | 10−11 Torr | Average magnetic field strength: ~1 to 5 µT; Electric field strength: ~0; Magnetic field fluctuations: ~0. | Atomic oxygen exposure: negligible; Total ionizing dose: up to 40,000 rads/year. |
| HEO | −210 °C to +150 °C | Average 2 to 20 mSv per day | 10−10 to 10−12 Torr | Average magnetic field strength: at perigee ~10 to 60 µT, at apogee ~1 to 10 µT; Electric field strength: ~1 to 10 mV/m; Magnetic field fluctuations: ~10 to 100 nT. | Atomic oxygen exposure: negligible; Total ionizing dose: up to 50,000 rads/year. |
3. Application of Piezoelectric Actuators and Motors in Space Missions
4. Numerical Investigation of Piezoelectric Actuator Under Orbital Conditions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Allegranza, C.; Gaillard, L.; Le Letty, R.; Patti, S.; Scolamiero, L.; Toso, M. Actuators for Space Applications: State of the Art and New Technologies. In Proceedings of the 14th International Conference on New Actuators, Bremen, Germany, 23–25 June 2014. [Google Scholar]
- Prasad, B.B.; Biju, N.; Panicker, M.R.R.; Kumar, K.; Murugesan, V. Failure Mode Investigation and Redundancy Management of an Electromechanical Control Actuator for Launch Vehicle Application. J. Fail. Anal. Prev. 2020, 20, 1644–1660. [Google Scholar] [CrossRef]
- Sivaprakash, N.; Shanmugam, J. Neural Network Based Three Axis Satellite Attitude Control Using Only Magnetic Torquers. J. Aerosp. Sci. Technol. 2023, 58, 71–77. [Google Scholar] [CrossRef]
- Feldmann, M.; Waldschik, A. Electromagnetic micro-actuators, micro-motors, and micro-robots. In Microelectronics: Design, Technology, and Packaging III; SPIE: Bellingham, WA, USA, 2007; Volume 6798, pp. 252–261. [Google Scholar] [CrossRef]
- Su, X.; Jia, Y.; Han, C.; Hu, Y.; Fu, Z.; Liu, K.; Yu, Y.; Yan, X.; Wang, Y. Flash sintering of lead zirconate titanate ceramics under an alternating current electrical field. Ceram. Int. 2019, 45, 5168–5173. [Google Scholar] [CrossRef]
- Naik, R.; Mohit, S.; Chavan, S. Piezoelectric property investigation on PVDF/ZrO2/ZnO nanocomposite for energy harvesting application. Eng. Res. Express 2021, 3, 025003. [Google Scholar] [CrossRef]
- Koc, B.; Uchino, K.; Motors, P.U. Piezoelectric Ultrasonic Motors. In Reference Module in Materials Science and Materials Engineering; Elsevier: Amsterdam, The Netherlands, 2016. [Google Scholar] [CrossRef]
- Priya, S.; Inman, D.J. Energy Harvesting Technologies; Springer: New York, NY, USA, 2009. [Google Scholar] [CrossRef]
- Mohith, S.; Upadhya, A.R.; Navin, K.P.; Kulkarni, S.M.; Rao, M. Recent trends in piezoelectric actuators for precision motion and their applications: A review. Smart Mater. Struct. 2021, 30, 013002. [Google Scholar] [CrossRef]
- Newnham, R.E. Properties of Materials: Anisotropy, Symmetry, Structure; Oxford University Press: Oxford, UK, 2005; Volume 42. [Google Scholar] [CrossRef]
- Gao, X.; Yang, J.; Wu, J.; Xin, X.; Li, Z.; Yuan, X.; Shen, X.; Dong, S. Piezoelectric Actuators and Motors: Materials, Designs, and Applications. Adv. Mater. Technol. 2020, 5, 1900716. [Google Scholar] [CrossRef]
- Niezrecki, C.; Brei, D.; Balakrishnan, S.; Moskalik, A. Piezoelectric actuation: State of the art. Shock Vib. Dig. 2001, 33, 269–280. [Google Scholar] [CrossRef]
- Mo, C.; Wright, R.; Slaughter, W.S.; Clark, W.W. Behaviour of a unimorph circular piezoelectric actuator. Smart Mater. Struct. 2006, 15, 1094–1102. [Google Scholar] [CrossRef]
- Chi, Z.; Xu, Q. Recent advances in the control of piezoelectric actuators. Int. J. Adv. Robot. Syst. 2014, 11, 182. [Google Scholar] [CrossRef]
- Aldraihem, O.J.; Singh, T.; Wetherhold, R.C. Optimal Size and Location of Piezoelectric Actuator/Sensors: Practical Considerations. J. Guid. Control Dyn. 2000, 23, 509–515. [Google Scholar] [CrossRef]
- Le Letty, R.; Barillot, F.; Fabbro, H.; Guay, P.; Cadiergues, L. Piezoelectric actuators for active optics. In Proceedings of the International Conference on Space Optics—ICSO 2004, Toulouse, France, 30 March–2 April 2004. [Google Scholar] [CrossRef]
- Jono, T.; Takayama, Y.; Ohinata, K.; Kura, N.; Koyama, Y.; Arai, K.; Shiratama, K.; Sodnik, Z.; Bird, A.; Demelenne, B. Demonstrations of ARTEMIS-OICETS inter-satellite laser communications. In Proceedings of the Collection of Technical Papers—24th AIAA International Communications Satellite Systems Conference, ICSSC, San Diego, CA, USA, 11–14 June 2006. [Google Scholar] [CrossRef]
- Wei, Z.; Li, D.; Luo, Q.; Jiang, J. Modeling and analysis of a flywheel microvibration isolation system for spacecrafts. Adv. Space Res. 2015, 55, 761–777. [Google Scholar] [CrossRef]
- Pages, A.; Maillard, T.; Rebufa, J. Piezo actuators for telescope active optics. In Proceedings of the Advances in Optical and Mechanical Technologies for Telescopes and Instrumentation V, Montreal, QC, Canada, 17–22 July 2022. [Google Scholar] [CrossRef]
- Freudling, M.; Grzesik, A.; Erhard, M.; Gerhards, M.; Leitz, S.; Verpoort, S.; Wittrock, U.; Hallibert, P. Space-qualified Piezo Based Deformable Mirror for future Instruments with Active Optics. In Proceedings of the International Conference on Space Optics—ICSO 2020, Online, 30 March–2 April 2021. [Google Scholar] [CrossRef]
- Nagarajaiah, N.K.D.; Neri, G.; Chaliyath, A.J.; Chiarelli, M.R.; Di Rito, G. Use of piezoelectric actuators for thrust vectoring in ion engines: Conceptual design and preliminary analysis. In Proceedings of the 2020 IEEE International Workshop on Metrology for AeroSpace, MetroAeroSpace 2020—Proceedings, Pisa, Italy, 22–24 June 2020. [Google Scholar] [CrossRef]
- Delpero, T.; Bergamini, A.; Ermanni, P. Concurrent Design of Adaptively Damped Structures. In Proceedings of the ICAST 2014, Ota, Nigeria, 29–31 October 2014. [Google Scholar]
- Lu, Y.; Shao, Q.; Yue, H.; Yang, F. A Review of the Space Environment Effects on Spacecraft in Different Orbits. IEEE Access 2019, 7, 93473–93488. [Google Scholar] [CrossRef]
- Messenger, G.C.; Ash, M.S. The Effects of Radiation on Electronic Systems; Springer: Dordrecht, The Netherlands, 1986. [Google Scholar] [CrossRef]
- Rycroft, M.J. The Space environment: Implications for spacecraft design. J. Atmos. Terr. Phys. 1996, 58, 1815–1816. [Google Scholar] [CrossRef]
- Velazco, R.; Fouillat, P.; Reis, R. Radiation Effects on Embedded Systems; Springer: Dordrecht, The Netherlands, 2007. [Google Scholar] [CrossRef]
- Xu, T.B.; Huffine, J. Review on PMN-PT Relaxor Piezoelectric Single Crystal Materials for Cryogenic Actuators. In Proceedings of the AIAA Science and Technology Forum and Exposition, AIAA SciTech Forum 2022, San Diego, CA, USA, 3–7 January 2022. [Google Scholar] [CrossRef]
- Liu, H.L. Variability and predictability of the space environment as related to lower atmosphere forcing. Space Weather 2016, 14, 634–658. [Google Scholar] [CrossRef]
- Gombosi, T.I.; Holman, G.D. Physics of the Space Environment. Phys. Today 1999, 52, 62–63. [Google Scholar] [CrossRef]
- Koons, H.C.; Mazur, J.E.; Selesnick, R.S.; Blake, J.B.; Fennell, J.F.; Roeder, J.L.; Anderson, P.C. The impact of the space environment on space systems. In Proceedings of the 6th Spacecraft Charging Technology Conference, AFRL Science Center, Hanscom AFB, MA, USA, 1 September 2000. [Google Scholar]
- Prölss, G.W. Physics of the Earth’s Space Environment; Springer: Dordrecht, The Netherlands, 2004. [Google Scholar] [CrossRef]
- Bourdarie, S.; Xapsos, M. The near-Earth space radiation environment. IEEE Trans. Nucl. Sci. 2008, 55, 1810–1832. [Google Scholar] [CrossRef]
- Vayner, B.V.; Ferguson, D.C.; Galofaro, J.T. Comparative analysis of arcing in leo and geo simulated environments. In Proceedings of the Collection of Technical Papers—45th AIAA Aerospace Sciences Meeting, Reno, NV, USA, 8–11 January 2007. [Google Scholar] [CrossRef]
- Kiefer, J.; Pross, H. Space radiation effects and microgravity. Mutat. Res. Mol. Mech. Mutagen. 1999, 430, 299–305. [Google Scholar] [CrossRef]
- Snell, E.H.; Helliwell, J.R. Microgravity as an environment for macromolecular crystallization—An outlook in the era of space stations and commercial space flight. Crystallogr. Rev. 2021, 27, 3–46. [Google Scholar] [CrossRef]
- Anderson, M.; Zagrai, A.N.; Daniel, J.D.; Westpfahl, D.J.; Henneke, D. Investigating effect of space radiation environment on piezoelectric sensors: Cobalt-60 irradiation experiment. J. Nondestruct. Eval. Diagn. Progn. Eng. Syst. 2017, 1, 011007. [Google Scholar] [CrossRef]
- Gorney, D.J. Solar cycle effects on the near-Earth space environment. Rev. Geophys. 1990, 28, 315–336. [Google Scholar] [CrossRef]
- Kim, M.Y.; Wilson, J.W.; Cucinotta, F.A. A solar cycle statistical model for the projection of space radiation environment. Adv. Space Res. 2005, 37, 1741–1748. [Google Scholar] [CrossRef]
- Dyer, C. Radiation effects on spacecraft & aircraft. In Proceedings of the Solspa 2001, The Second Solar Cycle and Space Weather Euroconference, Vico Equense, Italy, 24–29 September 2002. [Google Scholar]
- Sharma, A.K.; Sridhara, N. Degradation of thermal control materials under a simulated radiative space environment. Adv. Space Res. 2012, 50, 1411–1424. [Google Scholar] [CrossRef]
- Lachance, J.; Coa, C.; Fozza, A.C.; Czeremuszkin, G.; Houdayer, A.; Wertheimer, M.R. Radiation-induced degradation of polymeric spacecraft materials under protective oxide coatings. Nucl. Instrum. Methods Phys. Res. B 2001, 185, 328–335. [Google Scholar] [CrossRef]
- Patrick, T. Space environment and vacuum properties of spacecraft materials. Vacuum 1981, 31, 351–357. [Google Scholar] [CrossRef]
- Anwar, A.; Albano, M.; Hassan, G.; Delfini, A.; Volpini, F.; Marchetti, M.; Elfiky, D. Vacuum Effect on Spacecraft Structure Materials. Int. Conf. Aerosp. Sci. Aviat. Technol. 2015, 16, 1–10. [Google Scholar] [CrossRef]
- Fayazbakhsh, K.; Abedian, A. Materials selection for applications in space environment considering outgassing phenomenon. Adv. Space Res. 2010, 45, 741–749. [Google Scholar] [CrossRef]
- Urayama, F.; Hayashi, T.; Takeda, N.; Baba, N. Modeling of material outgassing and deposition phenomena. In Proceedings of the Optical Systems Degradation, Contamination, and Stray Light: Effects, Measurements, and Control, Denver, CO, USA, 2–5 August 2004. [Google Scholar] [CrossRef]
- Anderson, J.R.; Wong, A.T.; Fugett, D.; Hoey, W. Modeling Radiation Influence on Spacecraft Materials Outgassing. In Proceedings of the IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 7–14 March 2020. [Google Scholar] [CrossRef]
- Novikov, L.; Chernik, V.N.; Naumov, S.F.; Sokolova, S.P.; Gerasimova, T.I.; Kurilyonok, A.O.; Smirnova, T.N. Degradation Testing of Spacecraft Materials for Long Flights in Low Earth Orbit. J. Spacecr. Rocket. 2006, 43, 534–538. [Google Scholar] [CrossRef]
- Miller, S.K.; Banks, B. Degradation of Spacecraft Materials in the Space Environment. MRS Bull. 2010, 35, 20–24. [Google Scholar] [CrossRef]
- Roberts, E.W. Space tribology: Its role in spacecraft mechanisms. J. Phys. D Appl. Phys. 2012, 45, 503001. [Google Scholar] [CrossRef]
- Walter, N.A.; Scialdone, J.J. Outgassing Data for Selecting Spacecraft Materials; NASA: Greenbelt, MA, USA, 1997; Revision 4. [Google Scholar]
- Grossman, E.; Gouzman, I. Space environment effects on polymers in low earth orbit. Nucl. Instruments Methods Phys. Res. Sect. B Beam Interact. Mater. At. 2003, 208, 48–57. [Google Scholar] [CrossRef]
- Hunstig, M. Piezoelectric Inertia Motors—A Critical Review of History, Concepts, Design, Applications, and Perspectives. Actuators 2017, 6, 7. [Google Scholar] [CrossRef]
- Zhou, X.; Wu, S.; Wang, X.; Wang, Z.; Zhu, Q.; Sun, J.; Huang, P.; Wang, X.; Huang, W.; Lu, Q. Review on piezoelectric actuators: Materials, classifications, applications, and recent trends. Front. Mech. Eng. 2024, 19, 6. [Google Scholar] [CrossRef]
- Deng, J.; Cheng, J.; Guan, Y.; Li, H.; Lu, F.; Chen, W. Research on the Influence of Friction Pairs on the Output Characteristics of the Piezoelectric Ultrasonic Actuator. Actuators 2022, 11, 212. [Google Scholar] [CrossRef]
- Gadalla, M.A. Prediction of temperature variation in a rotating spacecraft in space environment. Appl. Therm. Eng. 2005, 25, 2379–2397. [Google Scholar] [CrossRef]
- Tan, Q.; Li, F.; Liu, L.; Liu, Y.; Leng, J. Effects of vacuum thermal cycling, ultraviolet radiation and atomic oxygen on the mechanical properties of carbon fiber/epoxy shape memory polymer composite. Polym. Test. 2023, 118, 107915. [Google Scholar] [CrossRef]
- Meseguer, J.; Pérez-Grande, I.; Sanz-Andrés, A. Spacecraft Thermal Control; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar] [CrossRef]
- Hengeveld, D.W.; Mathison, M.M.; Braun, J.E.; Groll, E.A.; Williams, A.D. Review of modern spacecraft thermal control technologies. HVAC&R Res. 2010, 16, 189–220. [Google Scholar] [CrossRef]
- Tachikawa, S.; Nagano, H.; Ohnishi, A.; Nagasaka, Y. Advanced Passive Thermal Control Materials and Devices for Spacecraft: A Review. Int. J. Thermophys. 2022, 43, 91. [Google Scholar] [CrossRef]
- Mermer, E.; Ünal, R. Passive thermal control systems in spacecrafts. J. Braz. Soc. Mech. Sci. Eng. 2023, 45, 160. [Google Scholar] [CrossRef]
- Hengeveld, D.W.; Braun, J.E.; Williams, A.D. Review of Modern Spacecraft Thermal Control Technologies and Their Application to Next- Generation Buildings. In Proceedings of the International High Performance Buildings Conference, Purdue, IN, USA, 12–15 July 2010. [Google Scholar]
- Osiander, R.; Firebaugh, S.; Champion, J.; Farrar, D.; GarrisonDarrin, M. Microelectromechanical Devices for Satellite Thermal Control. IEEE Sens. J. 2004, 4, 525–531. [Google Scholar] [CrossRef]
- Huang, J.; Chang, L.; Dong, B.; Liu, Z.; Han, S.; Si, C. Development on Space Environment and Its Dynamic and Thermal Problems of Ultra-LEO Satellites. Chin. J. Space Sci. 2023, 43, 711–713. [Google Scholar] [CrossRef]
- Sadkin, Y. Spacecraft quasi-static test performed on a shaker. In Proceedings of the 5th International Symposium on Environmental Testing for Space Programmes, Noordwijk, The Netherlands, 15–17 June 2004. [Google Scholar]
- Kamesh, D.; Pandiyan, R.; Ghosal, A. Modeling, design and analysis of low frequency platform for attenuating micro-vibration in spacecraft. J. Sound Vib. 2010, 329, 3431–3450. [Google Scholar] [CrossRef]
- Xu, Z.-D.; Chen, Z.-H.; Huang, X.-H.; Zhou, C.-Y.; Hu, Z.-W.; Yang, Q.-H.; Gai, P.-P. Recent advances in multi-dimensional vibration mitigation materials and devices. Front. Mater. 2019, 6, 143. [Google Scholar] [CrossRef]
- Han, Q.; Gao, S.; Chu, F. Micro-Vibration Analysis, Suppression, and Isolation of Spacecraft Flywheel Rotor Systems: A Review. Vibration 2024, 7, 229–263. [Google Scholar] [CrossRef]
- Claeyssen, F.; Le Letty, R.; Barillot, F.; Sosnicki, O. Amplified Piezoelectric Actuators: Static & Dynamic Applications. Ferroelectrics 2007, 351, 3–14. [Google Scholar] [CrossRef]
- Metz, B. Optimizing 3-component force sensor installation for satellite force limited vibration testing. In Proceedings of the 28th Space Simulation Conference—Extreme Environments: Pushing the Boundaries, Baltimore, MY, USA, 3–6 November 2014. [Google Scholar]
- JSC. “NanoAvionics”. NanoAvionics CubeSat Reaction Wheels RW0. Available online: https://nanoavionics.com/ (accessed on 8 August 2024).
- JSC. “AAC CLYDE SPACE”. AAC Clyde Space Reaction wheel RW400. Available online: https://www.aac-clyde.space (accessed on 8 August 2024).
- Yoshikawa, M.; Kawaguchi, J.; Fujiwara, A.; Tsuchiyama, A. The Hayabusa mission. In Sample Return Missions: The Last Frontier of Solar System Exploration; Elsevier: Amsterdam, The Netherlands, 2021. [Google Scholar] [CrossRef]
- Li, C.; Liu, J.; Ren, X.; Zuo, W.; Tan, X.; Wen, W.; Li, H.; Mu, L.; Su, Y.; Zhang, H.; et al. The Chang’e 3 Mission Overview. Space Sci. Rev. 2015, 190, 85–101. [Google Scholar] [CrossRef]
- Haq, M. Application of piezo transducers in biomedical science for health monitoring and energy harvesting problems. Mater. Res. Express 2019, 6, 022002. [Google Scholar] [CrossRef]
- Sherrit, S.; Jones, C.M.; Aldrich, J.B.; Blodget, C.; Bao, X.; Badescu, M.; Bar-Cohen, Y. Multilayer piezoelectric stack actuator characterization. In Proceedings of the Behavior and Mechanics of Multifunctional and Composite Materials 2008, San Diego, CA, USA, 10–13 March 2008. [Google Scholar] [CrossRef]
- Zhu, W.; Chen, G.; Rui, X. Modeling of piezoelectric stack actuators considering bonding layers. J. Intell. Mater. Syst. Struct. 2015, 26, 2418–2427. [Google Scholar] [CrossRef]
- Parrat, D.; Gautsch, S.; Howald, L.; Brändlin-Müller, D.; De Rooij, N.F.; Staufer, U. Design and evaluation of a polyimide spring system for the scanning force microscope of the phoenix mars mission 2007. In Proceedings of the 11th European Space Mechanisms and Tribology Symposium, ESMATS 2005, Lucerne, Switzerland, 21–23 September 2005. [Google Scholar]
- Maillard, T.; Le Letty, R.; Barillot, F.; Rajeev, G. Piezo Mechanisms for Optical and Space Applications in Europe. J. Aerosp. Sci. Technol. 2023, 19, 142–147. [Google Scholar] [CrossRef]
- Ma, L.; Wu, L.-Z.; Zhou, Z.-G.; Guo, L.-C. Fracture analysis of a functionally graded piezoelectric strip. Compos. Struct. 2005, 69, 294–300. [Google Scholar] [CrossRef]
- Chen, J.; Li, X.; Liu, G.; Chen, Z.; Dong, S. A shear-bending mode high temperature piezoelectric actuator. Appl. Phys. Lett. 2012, 101, 012909. [Google Scholar] [CrossRef]
- Tapley, B.D.; Bettadpur, S.; Watkins, M.; Reigber, C. The gravity recovery and climate experiment: Mission overview and early results. Geophys. Res. Lett. 2004, 31, L09607. [Google Scholar] [CrossRef]
- Touboul, P.; Foulon, B.; Christophe, B.; Marque, J.P. CHAMP, GRACE, GOCE instruments and beyond. In Proceedings of the International Association of Geodesy Symposia, Venice, Italy, 9–12 October 2012. [Google Scholar] [CrossRef]
- Sheard, B.S.; Heinzel, G.; Danzmann, K.; Shaddock, D.A.; Klipstein, W.M.; Folkner, W.M. Intersatellite laser ranging instrument for the GRACE follow-on mission. J. Geodesy 2012, 86, 1083–1095. [Google Scholar] [CrossRef]
- Taya, M.; Almajid, A.A.; Dunn, M.; Takahashi, H. Design of bimorph piezo-composite actuators with functionally graded microstructure. Sens. Actuators A Phys. 2003, 107, 248–260. [Google Scholar] [CrossRef]
- Chattaraj, N.; Ganguli, R. Performance improvement of a piezoelectric bimorph actuator by tailoring geometry. Mech. Adv. Mater. Struct. 2017, 25, 829–835. [Google Scholar] [CrossRef]
- Greenhouse, M.A. The JWST science instrument payload: Mission context and status. In Proceedings of the Space Telescopes and Instrumentation 2016: Optical, Infrared, and Millimeter Wave, Edinburgh, UK, 26 June–1 July 2016. [Google Scholar] [CrossRef]
- Birkmann, S.M.; Ferruit, P.; Rawle, T.; Sirianni, M.; de Oliveira, C.A.; Böker, T.; Giardino, G.; Lützgendorf, N.; Marston, A.; Stuhlinger, M.; et al. The JWST/NIRSpec instrument: Update on status and performances. In Proceedings of the Space Telescopes and Instrumentation 2016: Optical, Infrared, and Millimeter Wave, Edinburgh, UK, 26 June–1 July 2016. [Google Scholar] [CrossRef]
- Wright, G.S.; Rieke, G.H.; Colina, L.; van Dishoeck, E.; Goodson, G.; Greene, T.; Lagage, P.-O.; Karnik, A.; Lambros, S.D.; Lemke, D.; et al. The JWST MIRI instrument concept. In Proceedings of the Optical, Infrared, and Millimeter Space Telescopes, Glasgow, UK, 21–25 June 2004. [Google Scholar] [CrossRef]
- Uchino, K. Piezoelectric ultrasonic motors: Overview. Smart Mater. Struct. 1998, 7, 273–285. [Google Scholar] [CrossRef]
- Li, X.; Wen, Z.; Jia, B.; Cao, T.; Yu, D.; Wu, D. A Review of Application and Development Trends in Ultrasonic Motors. ES Mater. Manuf. 2021, 12, 3–16. [Google Scholar] [CrossRef]
- Bekiroglu, E. Ultrasonic motors: Their models, drives, controls and applications. J. Electroceramics 2007, 20, 277–286. [Google Scholar] [CrossRef]
- Jingzhuo, S.; Dongmei, Y. Characteristic model of travelling wave ultrasonic motor. Ultrasonics 2014, 54, 725–730. [Google Scholar] [CrossRef]
- Ryndzionek, R.; Sienkiewicz, Ł. A review of recent advances in the single- and multi-degree-of-freedom ultrasonic piezoelectric motors. Ultrasonics 2021, 116, 106471. [Google Scholar] [CrossRef]
- Riu, L.; Bibring, J.-P.; Pilorget, C.; Poulet, F.; Hamm, V. The on-ground calibration performances of the hyperspectral microscope MicrOmega for the Hayabusa-2 mission. Planet. Space Sci. 2018, 152, 31–44. [Google Scholar] [CrossRef]
- Radi, B.; El Hami, A. The study of the dynamic contact in ultrasonic motor. Appl. Math. Model. 2010, 34, 3767–3777. [Google Scholar] [CrossRef]
- Zhou, H.; Feng, X.; Dong, Z.; Liu, C.; Liang, W. Application of Denoising CNN for Noise Suppression and Weak Signal Extraction of Lunar Penetrating Radar Data. Remote. Sens. 2021, 13, 779. [Google Scholar] [CrossRef]
- Li, C.L.; Xu, R.; Lv, G.; Yuan, L.Y.; He, Z.P.; Wang, J.Y. Detection and calibration characteristics of the visible and near-infrared imaging spectrometer in the Chang’e-4. Rev. Sci. Instrum. 2019, 90, 103106. [Google Scholar] [CrossRef]
- Delaboudinière, J.P.; Artzner, G.E.; Brunaud, J.; Gabriel, A.H.; Hochedez, J.F.; Millier, F.; Song, X.Y.; Au, B.; Dere, K.P.; Howard, R.A.; et al. EIT: Extreme-ultraviolet Imaging Telescope for the SOHO mission. Sol. Phys. 1995, 162, 291–312. [Google Scholar] [CrossRef]
- Meng, Y.; Chen, G.; Huang, M. Piezoelectric Materials: Properties, Advancements, and Design Strategies for High-Temperature Applications. Nanomaterials 2022, 12, 1171. [Google Scholar] [CrossRef]
- Jin, H.; Gao, X.; Ren, K.; Liu, J.; Qiao, L.; Liu, M.; Chen, W.; He, Y.; Dong, S.; Xu, Z.; et al. Review on Piezoelectric Actuators Based on High-Performance Piezoelectric Materials. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2022, 69, 3057–3069. [Google Scholar] [CrossRef]
- ShSharma, Y.; Lee, M.-C.; Pitike, K.C.; Mishra, K.K.; Zheng, Q.; Gao, X.; Musico, B.L.; Mazza, A.R.; Katiyar, R.S.; Keppens, V.; et al. High Entropy Oxide Relaxor Ferroelectrics. ACS Appl. Mater. Interfaces 2022, 14, 11962–11970. [Google Scholar] [CrossRef]
- Jayakrishnan, A.; Silva, J.; Kamakshi, K.; Dastan, D.; Annapureddy, V.; Pereira, M.; Sekhar, K. Are lead-free relaxor ferroelectric materials the most promising candidates for energy storage capacitors? Prog. Mater. Sci. 2023, 132, 101046. [Google Scholar] [CrossRef]



| Type of Motor | Type of Motion Source | Dynamic and Physical Characteristics |
|---|---|---|
| NanoAvionics CubeSat Reaction Wheels RW0 | DC brushless motor | Mass—137 g Maximum speed—6500 RPM Maximum torque—3.2 mNm Power consumption—0.15 W @ 1000 RPM Volume—45.41 cm3 |
| AAC Clyde Space Reaction wheel RW400 | DC brushless motor | Mass—197 g Maximum speed—5000 RPM Maximum torque—8 mNm Power consumption—1.9 W peak Volume—67.5 cm3 |
| Piezoelectric motor used in HAYABUSA (MUSES−C) space mission for sample collection from asteroid | Ultrasonic motor | Mass—150—200 g Maximum speed—1000 RPM Maximum torque—in range from 0.1 to 1 Nm Power consumption—in range from 5 to 20 W Volume—55.2 cm3 |
| Piezoelectric motor used in Chang’e−3 (Yutu rover) space mission for soil sampling and instrument positioning | Ultrasonic motor | Mass—250 g Maximum speed—1200 RPM Maximum torque—in range from 0.2 to 1.2 Nm Power consumption—in range from 8 to 15 W Volume—64.1 cm3 |
| Type of Piezoelectric Actuator | Title of Space Mission | Mission Objective | Instrument Utilizing Piezo Device | Piezoelectric Actuator Specifications |
|---|---|---|---|---|
| Multilayer | Mars Phoenix Lander | Soil and atmospheric analysis on Mars | Satellite antenna deployment | High force, precise displacement, compact and robust structure, high force-to-weight ratio, excellent frequency response, minimal electromagnetic interference. |
| Shear-Type | GRACE (Gravity Recovery and Climate Experiment) | Detailed measurements of Earth’s gravitational field | Fine adjustment of the relative positions of onboard instruments | Precise, multidirectional positioning, compensating for thermal expansions and contractions, maintaining precise alignment. |
| Bimorph | James Webb Space Telescope (JWST) | High-resolution imaging of distant celestial objects | Fine steering mirror | Greater displacement and sensitivity, low power consumption, minimal mechanical complexity, high precision, redundant dual-layer construction for enhanced reliability. |
| Ultrasonic Motor | HAYABUSA (MUSES-C) | Sample collection from asteroid | Deployment mechanisms of sample collection device | Rotary–type motors, compact design 35–40 mm in diameter, 40–50 mm in height, weight in range of 150–200 g, torque output in range of 0.1–1 Nm, angular speed up to 1000 RPM, operational voltage in range of 24–48V, power consumption in range of 5–20 W. |
| Ultrasonic Motor | Chang’e–3 (Yutu rover) | Soil sampling and instrument positioning on the Moon | Robotic arm | Compact, 50 mm diameter, 60 mm length, weight 250 g, torque 0.2–1.2 Nm, angular speed up to 1200 RPM, operational voltage 28–40), power consumption 8–15 W. |
| Ultrasonic Motor | SOHO (Solar and Heliospheric Observatory) | Study the Sun, from its deep core to the outer corona, and solar wind | Precise adjustments of instruments for solar observation | Linear movement, compact 35 mm length, 10 mm diameter, operational speed up to 200 mm/s, low power consumption 2–10 W, high resolution and stability. |
| Material Properties | Stainless Steel DIN 1.4301 | Lead Zirconate Titanate (PZT-8) | Aluminum 6063-T83 |
|---|---|---|---|
| Density, [kg/m3] | 8000 | 7600 | 3980 |
| Young’s modulus, [N/m2] | 193∙109 | 11∙1010 | 6.9∙1010 |
| Poisson’s coefficient | 0.29 | 0.31 | 0.33 |
| Isotropic structural loss factor | 0.02 | − | 0.4∙10−3 |
| Relative permittivity | − | ε11T/ε0 = 1290 ε22T/ε0 = 1290 ε33T/ε0 = 1000 | − |
| Elastic compliance coefficient, [10−12 m2/N] | − | S11E = 11.50 S33E = 13.50 | − |
| Elastic stiffness coefficient c33D, [N/m2] | − | 14.6·1010 | − |
| Piezoelectric constant d33, [10−12 m/V] | − | 225 | − |
| Piezoelectric constant d31, [10−12 m/V] | − | −97 | − |
| Piezoelectric constant d15, [10−12 m/V] | − | 330 | − |
| Coefficient of thermal expansion, [1/K] | 12.3∙10−6 | 5∙10−6 | 23.4∙10−6 |
| Thermal conductivity, [W/(m·K)] | 44.5 | 1.2 | 201 |
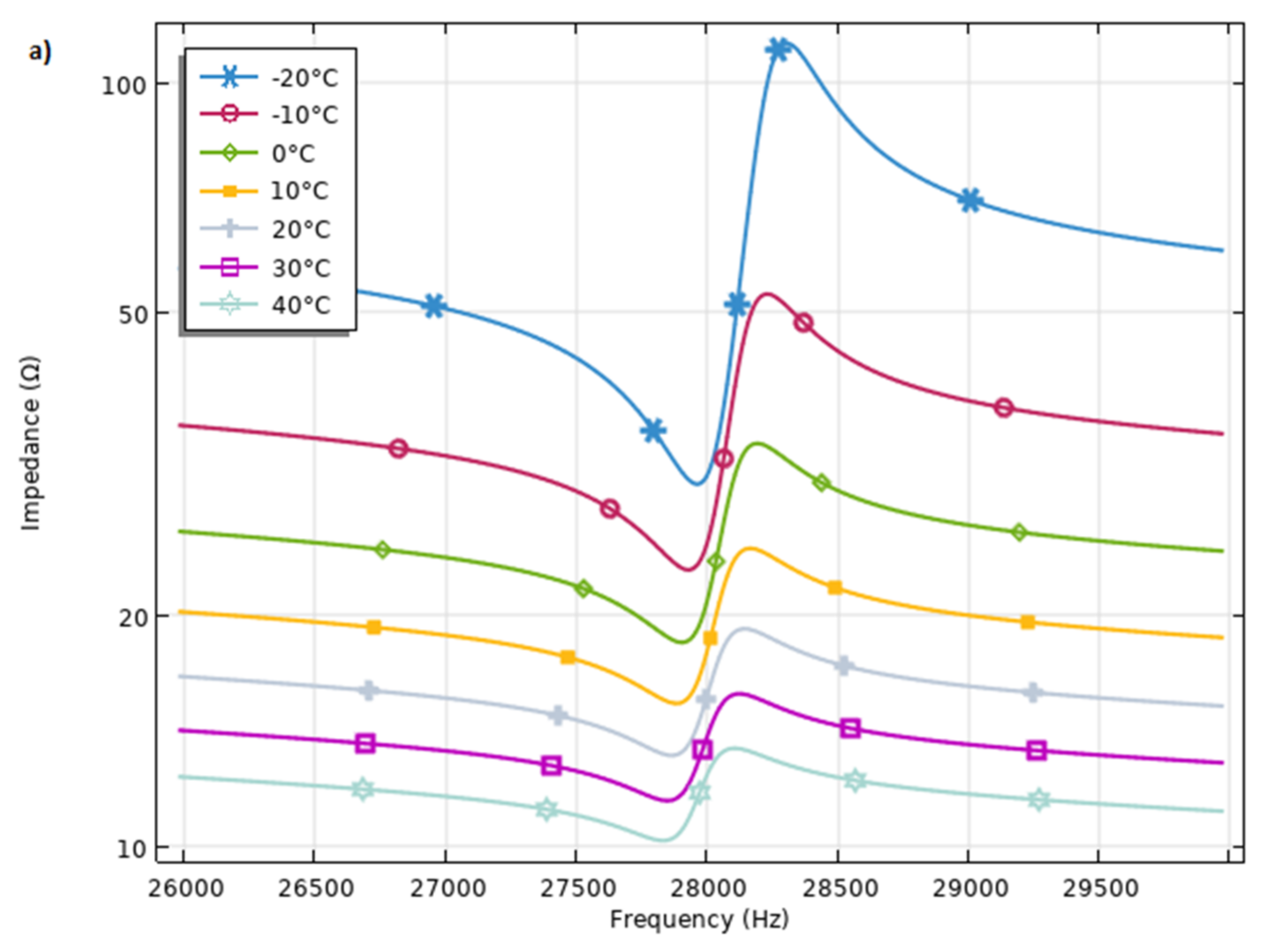
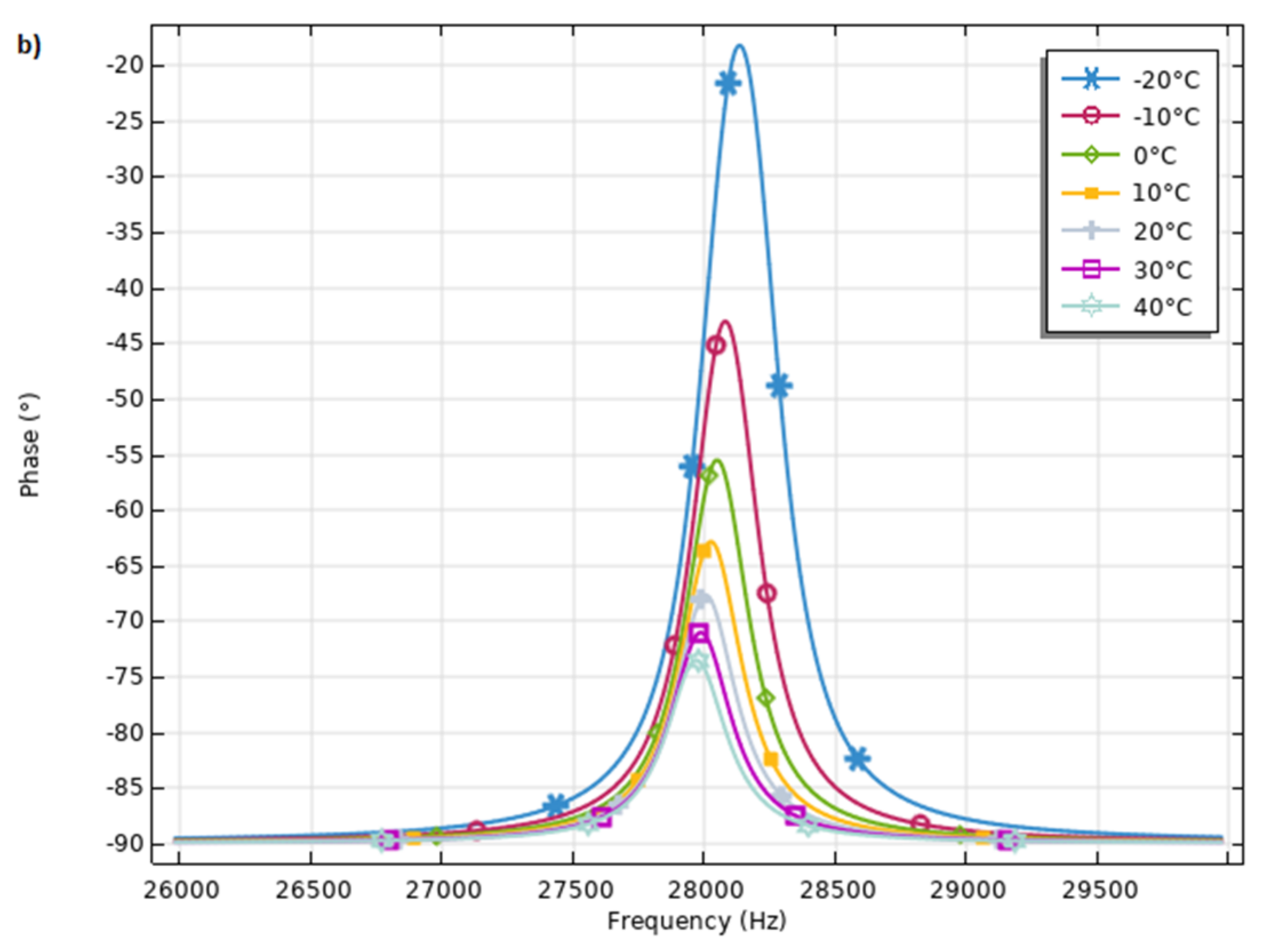
| Temperature [°C] | Resonant Frequency [Hz] | Impedance [Ω] | Phase [°] | keff |
|---|---|---|---|---|
| −20 | 28,036 | 297,316 | −181,652 | 0.0708 |
| −10 | 28,016 | 229,522 | −429,985 | 0.0803 |
| 0 | 28,006 | 184,398 | −554,804 | 0.0860 |
| 10 | 27,986 | 15,343 | −628,345 | 0.0848 |
| 20 | 27,976 | 131,134 | −676,392 | 0.0889 |
| 30 | 27,966 | 114,413 | −710,088 | 0.0929 |
| 40 | 27,946 | 101,445 | −73,5094 | 0.0890 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Šišovas, L.; Čeponis, A.; Borodinas, S. The Challenges of Piezoelectric Actuators and Motors Application in a Space Environment. Actuators 2024, 13, 312. https://doi.org/10.3390/act13080312
Šišovas L, Čeponis A, Borodinas S. The Challenges of Piezoelectric Actuators and Motors Application in a Space Environment. Actuators. 2024; 13(8):312. https://doi.org/10.3390/act13080312
Chicago/Turabian StyleŠišovas, Laurynas, Andrius Čeponis, and Sergejus Borodinas. 2024. "The Challenges of Piezoelectric Actuators and Motors Application in a Space Environment" Actuators 13, no. 8: 312. https://doi.org/10.3390/act13080312