
Design and Analysis of a Robotic Gripper Mechanism for Fruit Picking


Abstract
:1. Introduction
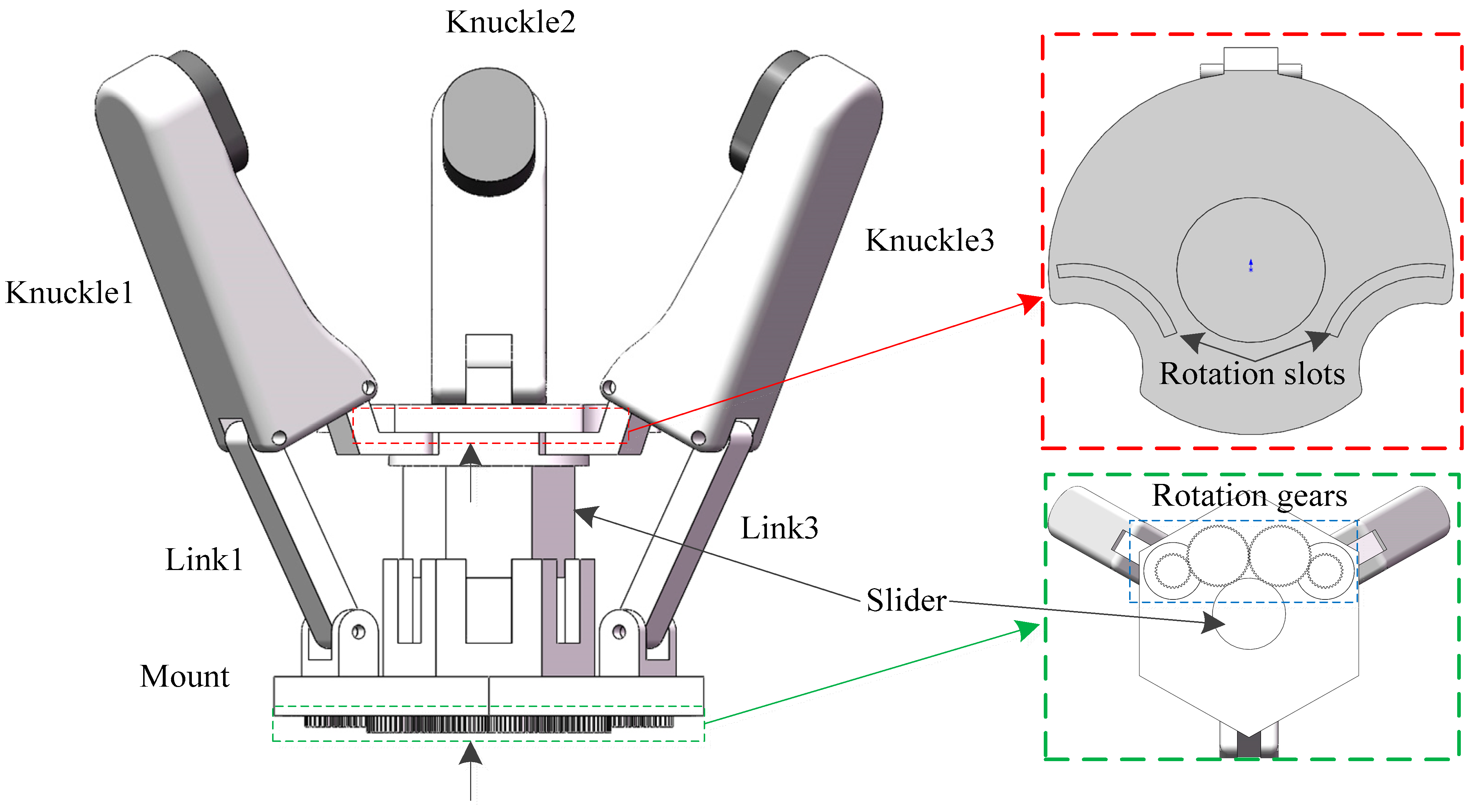
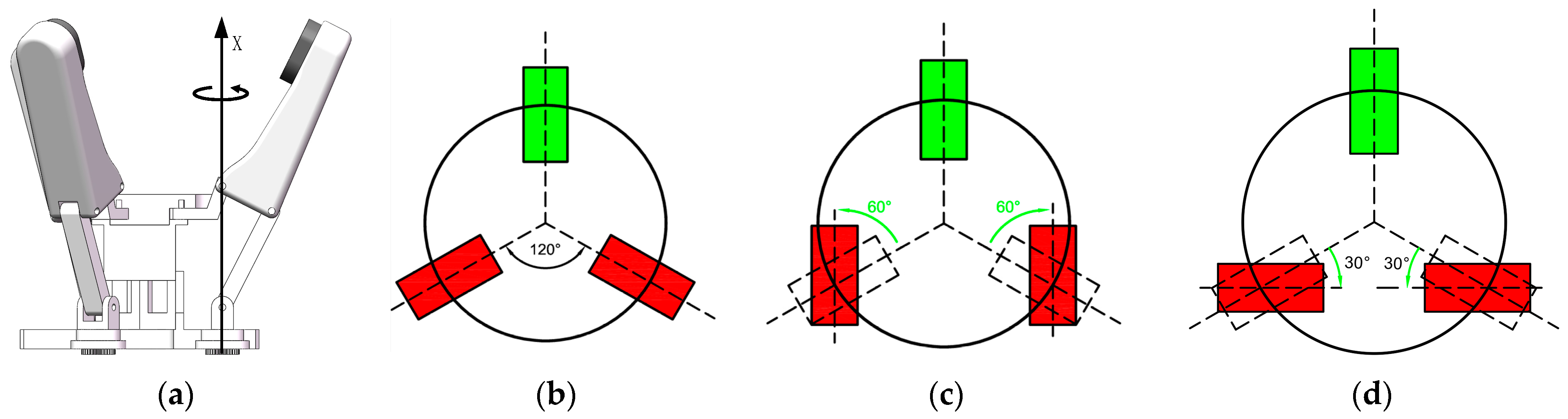
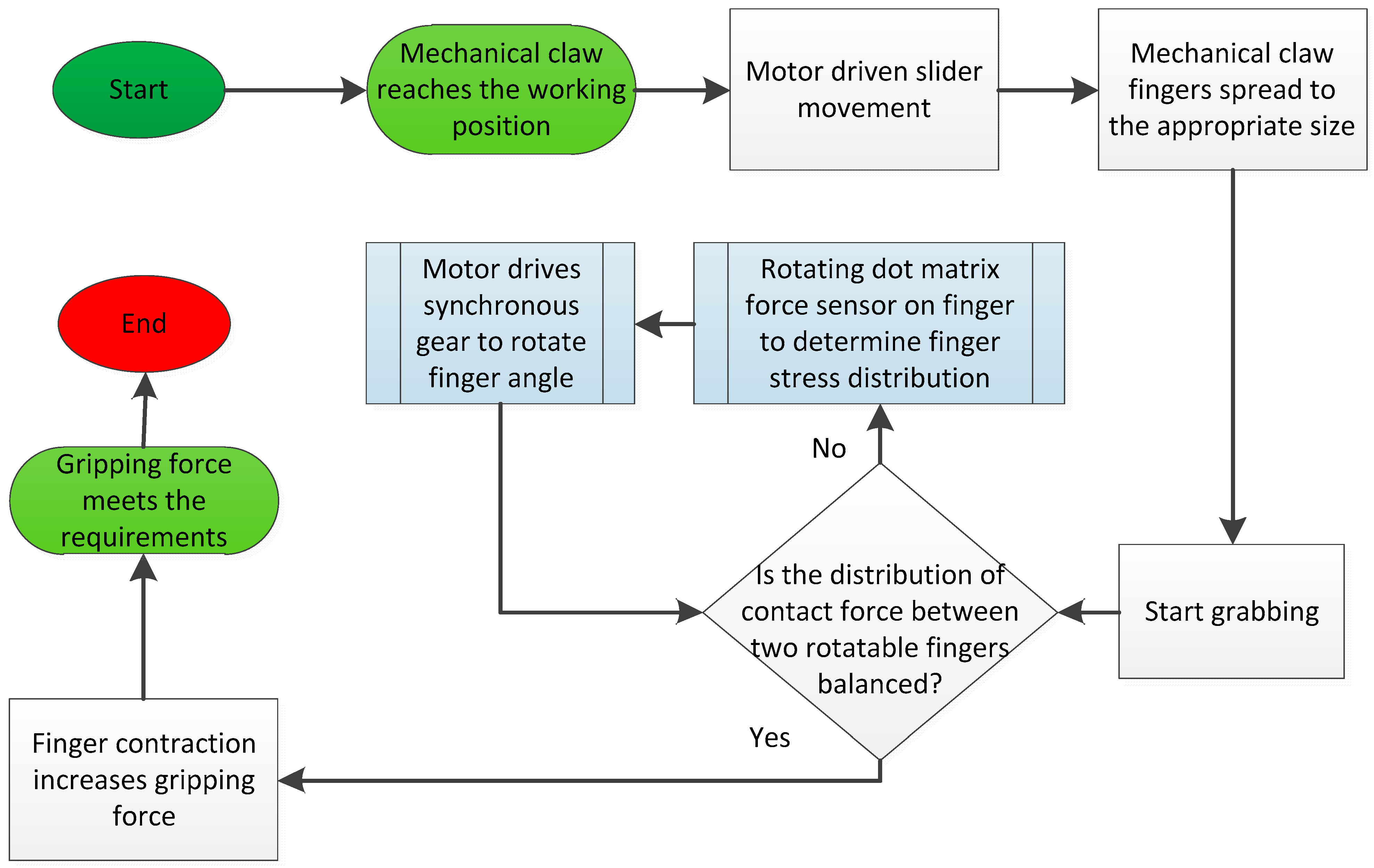
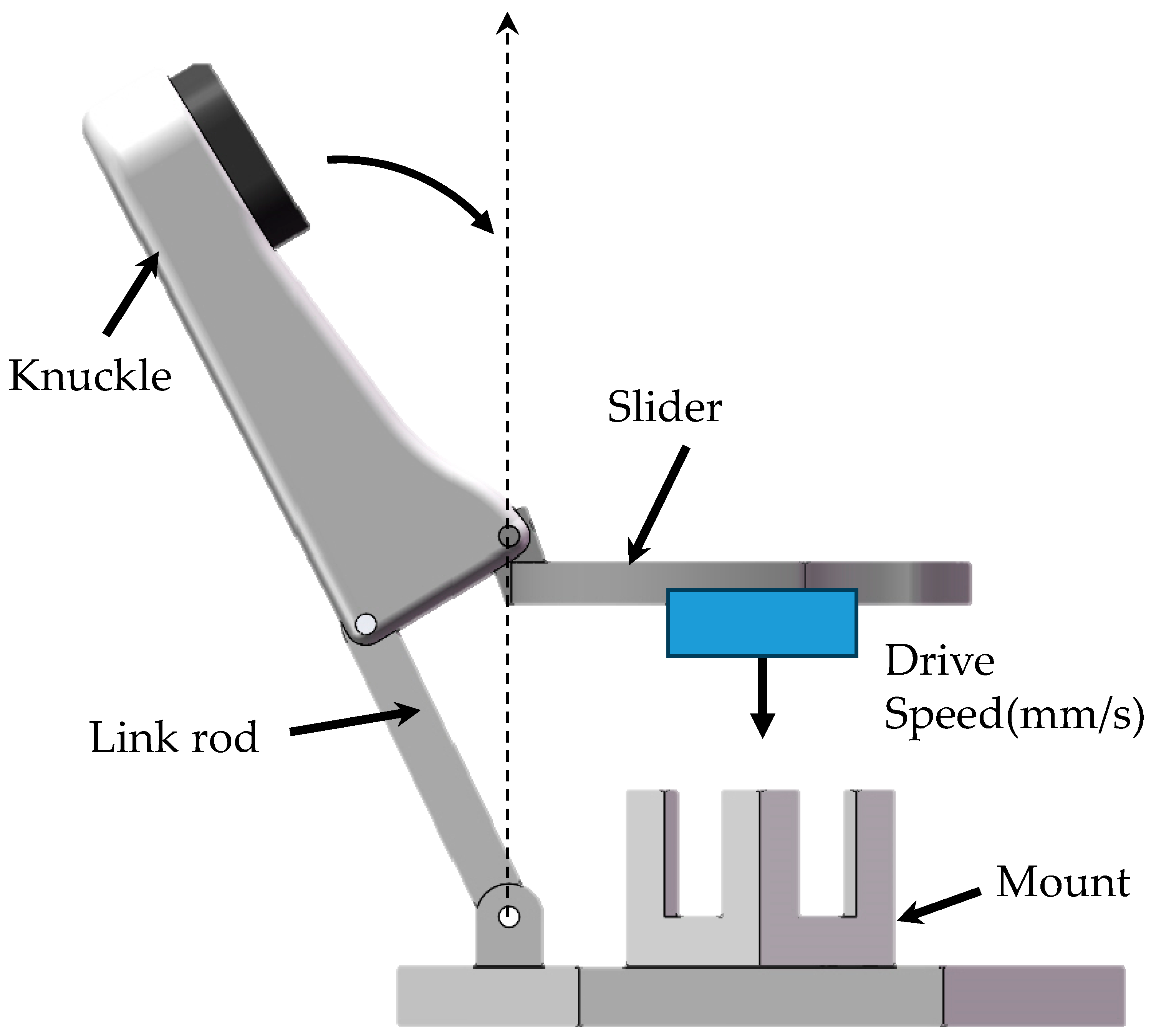
2. Design Scheme and Working Principle
3. Calculation and Simulation
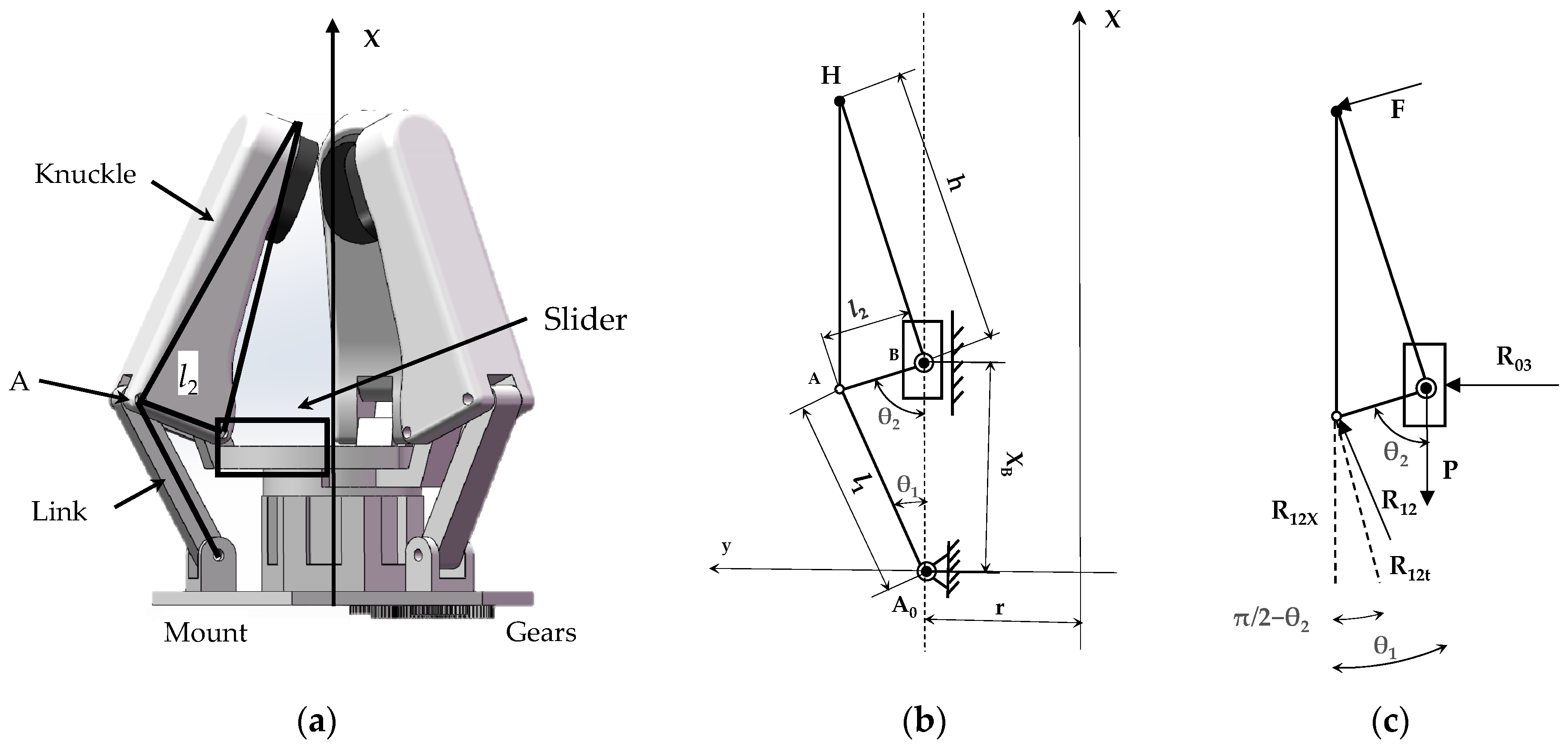
3.1. Motion Analysis
3.2. Grasping Force and Structure Size Calculation
3.3. Finite Element Analysis
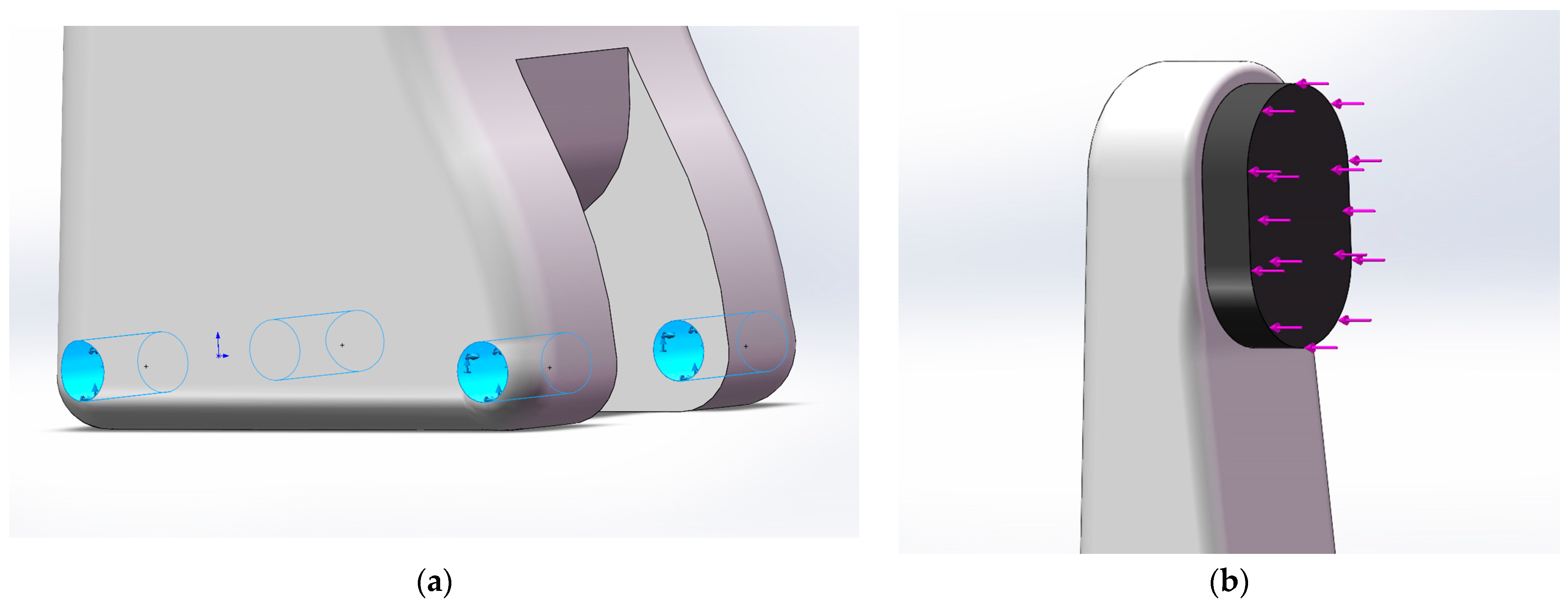
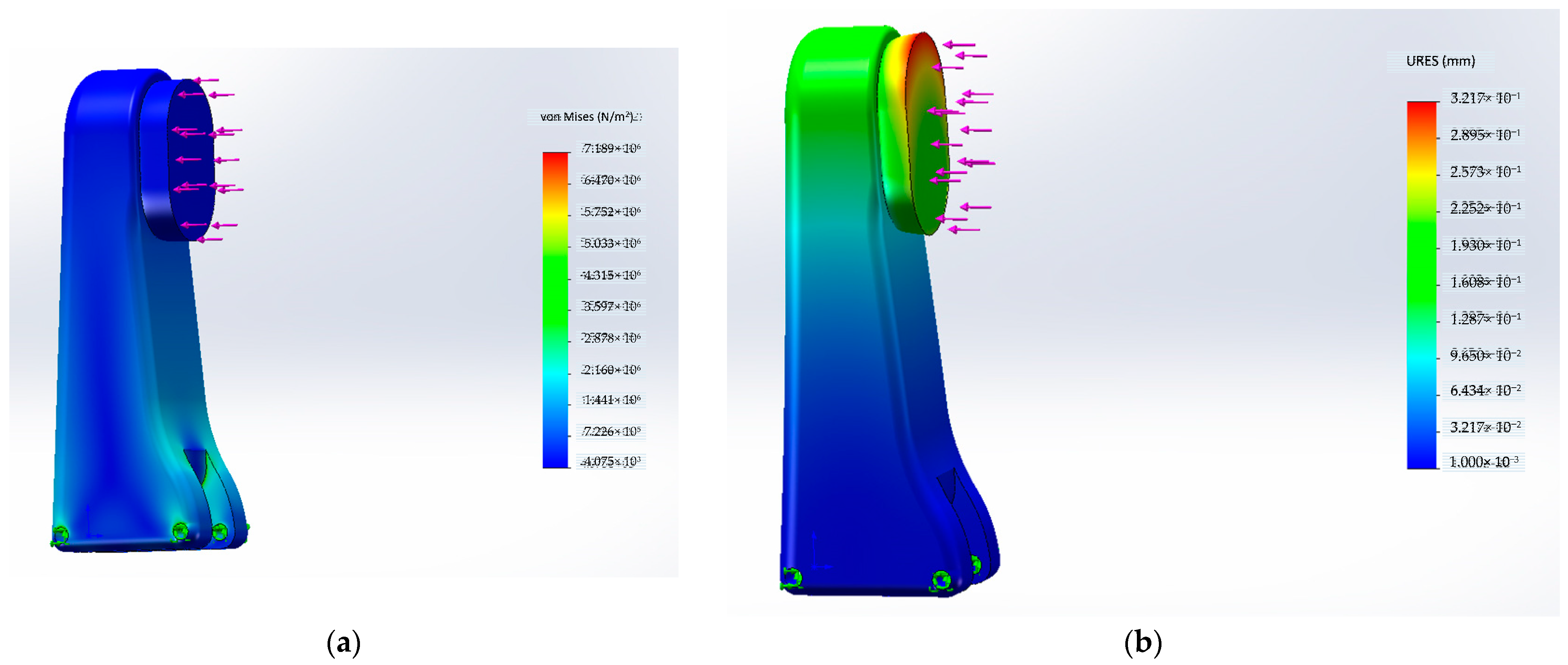
3.3.1. Structural Analysis of Robotic Gripper
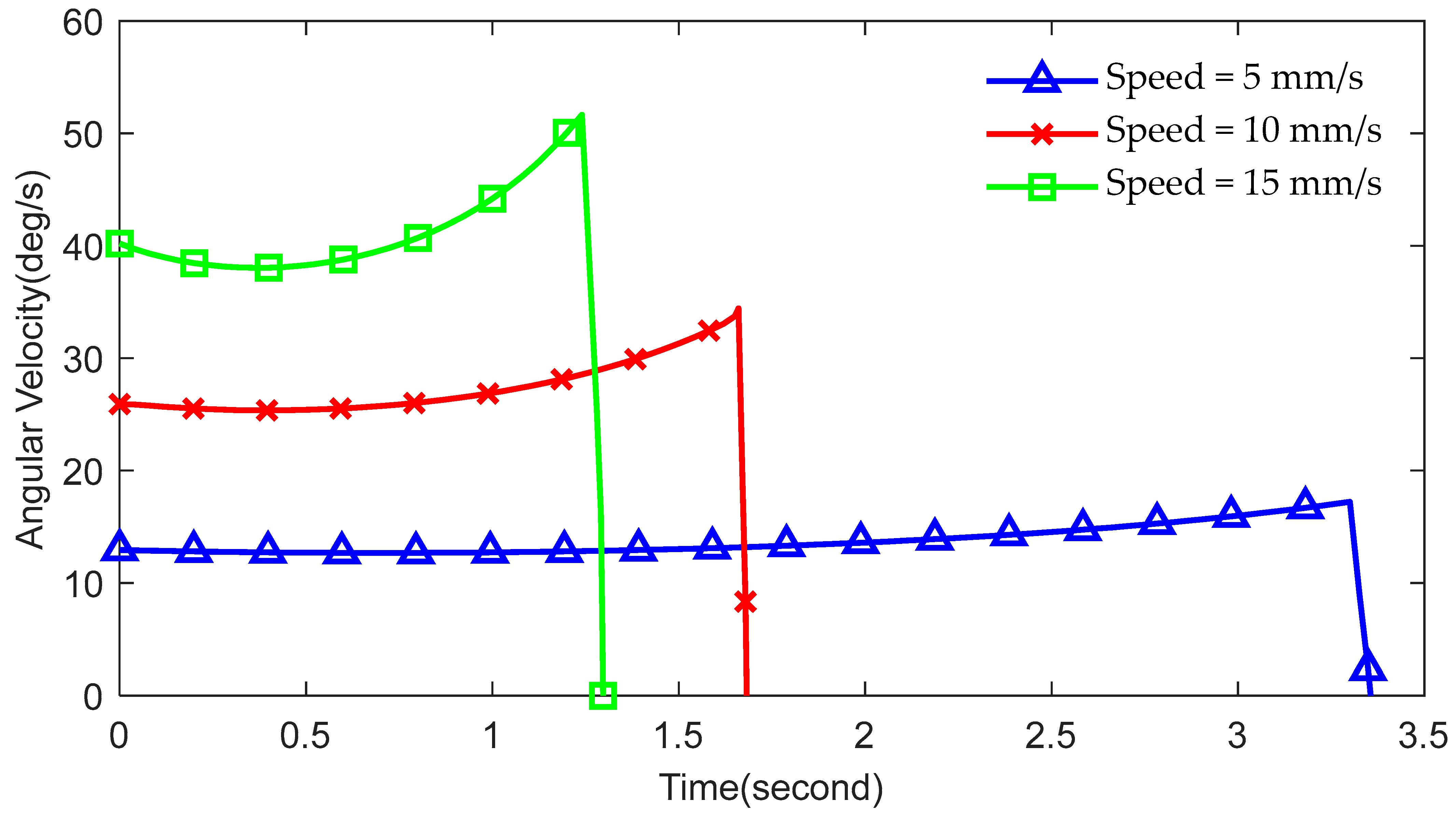
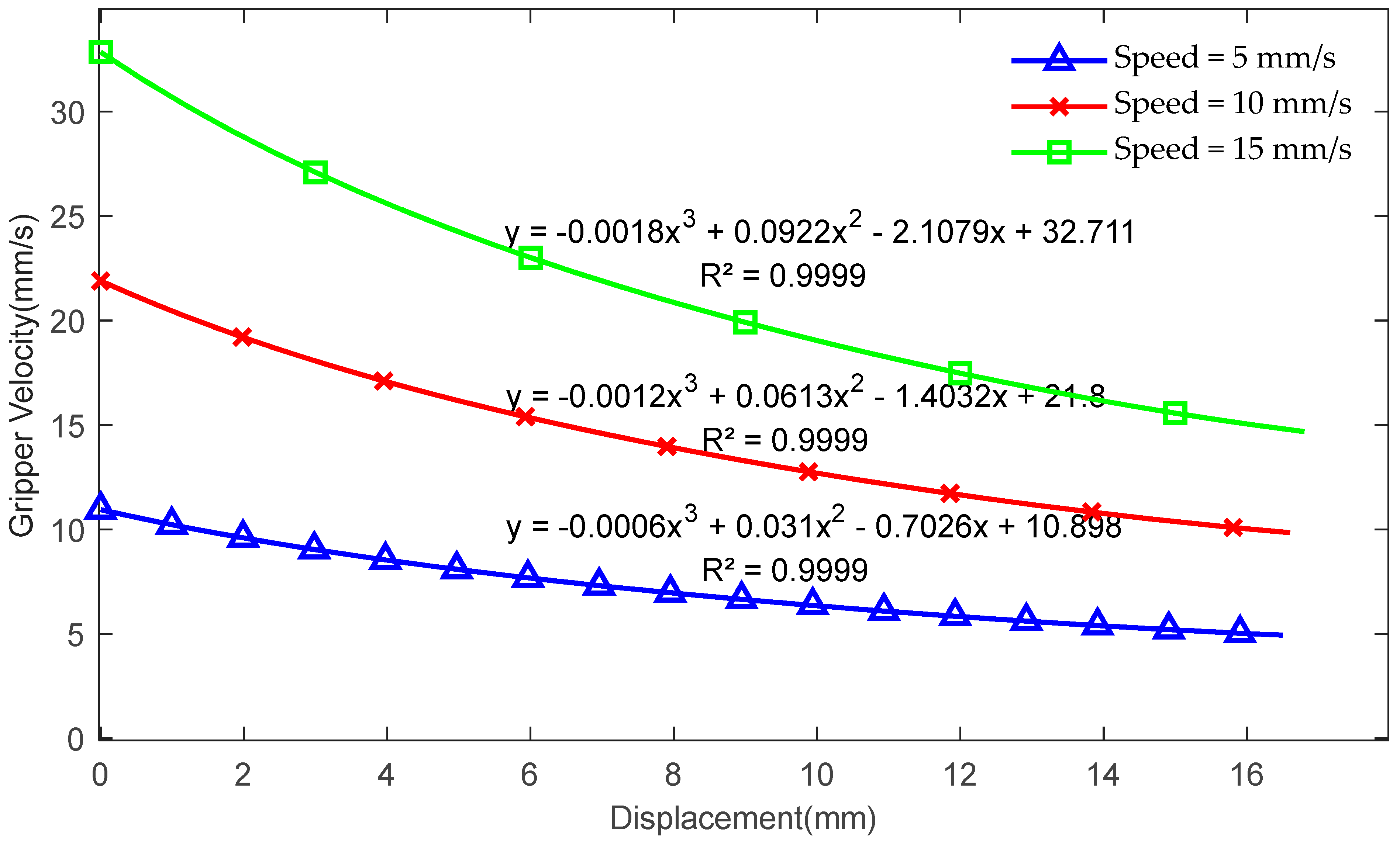
3.3.2. Motion Simulation
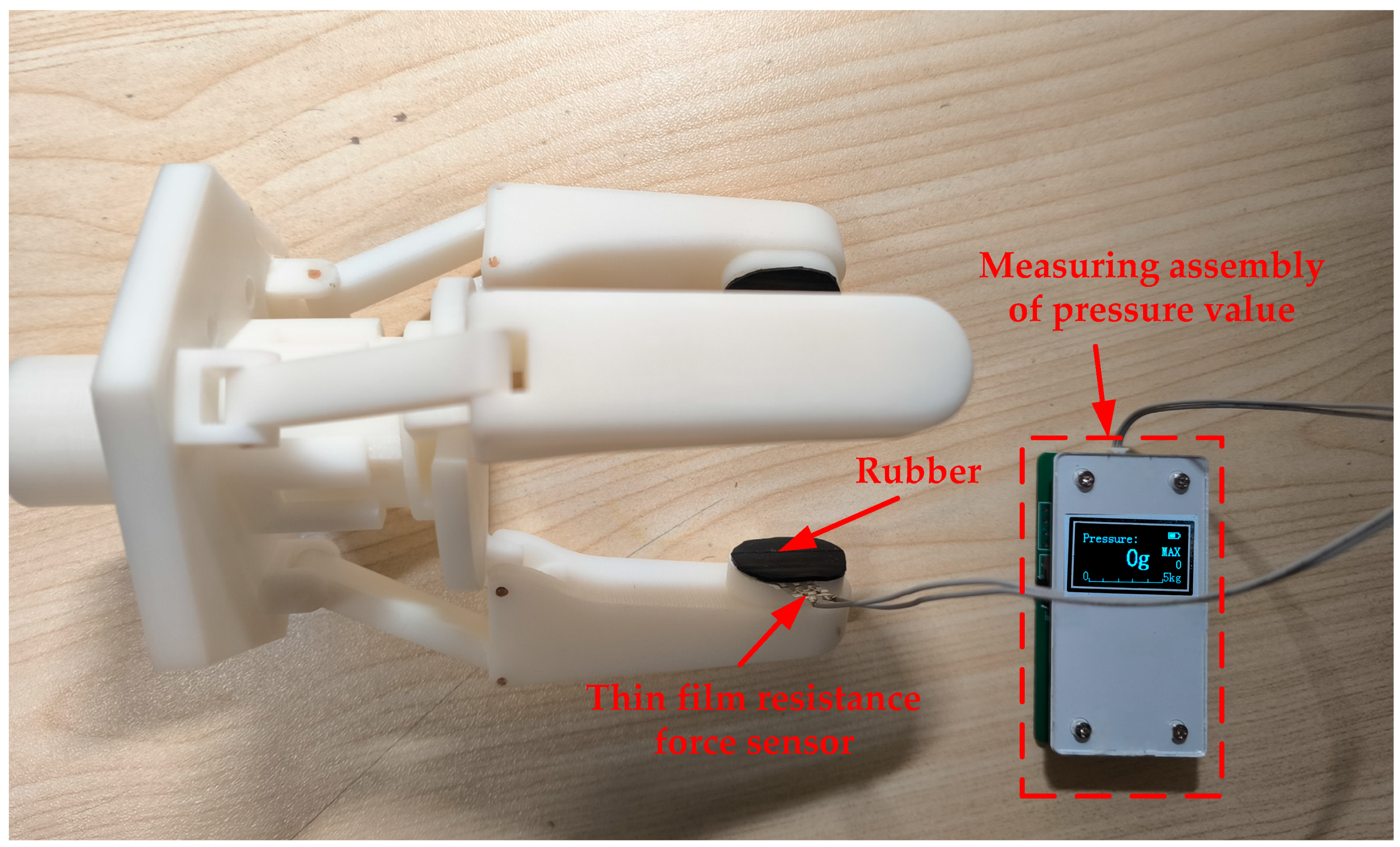
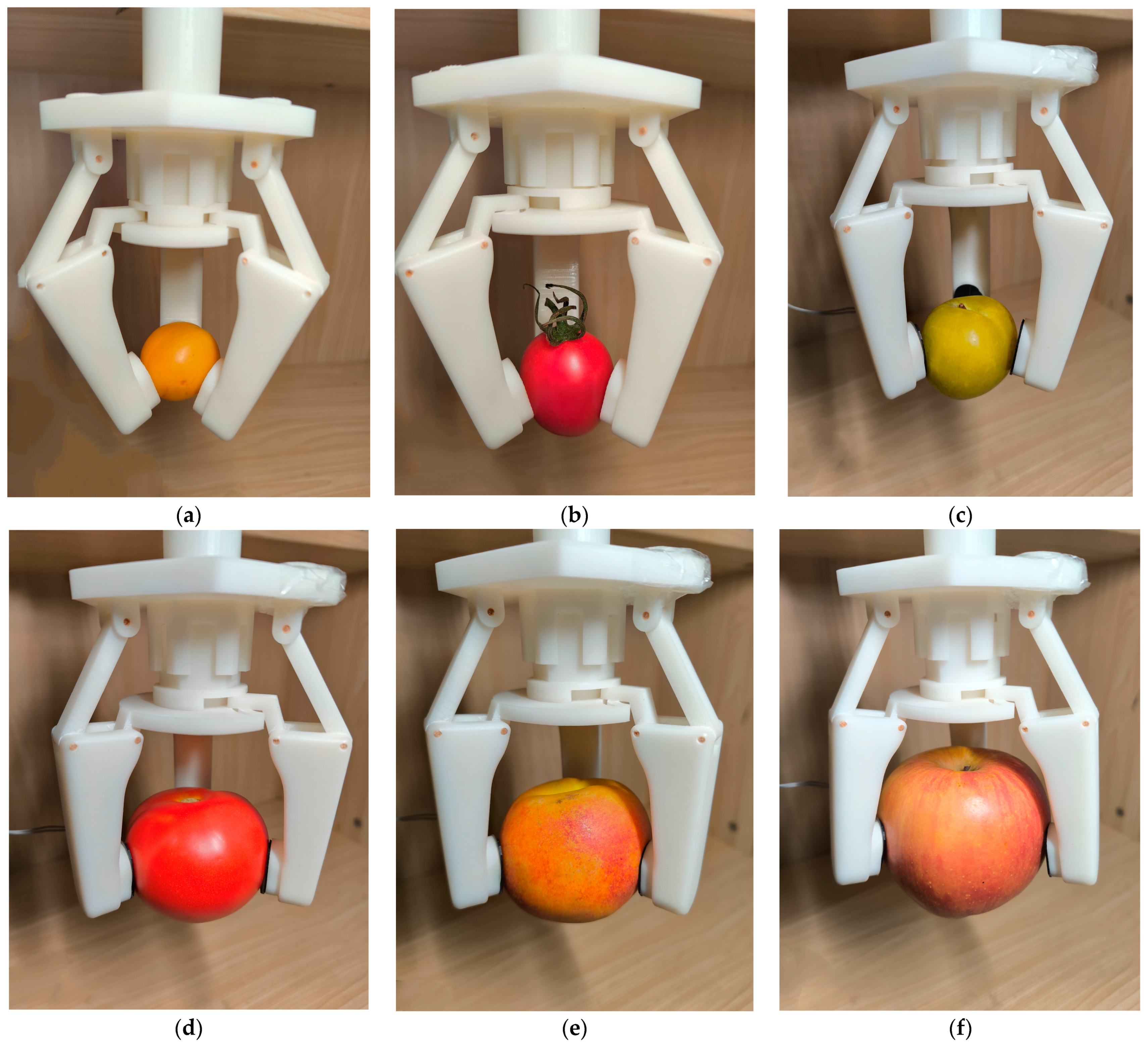
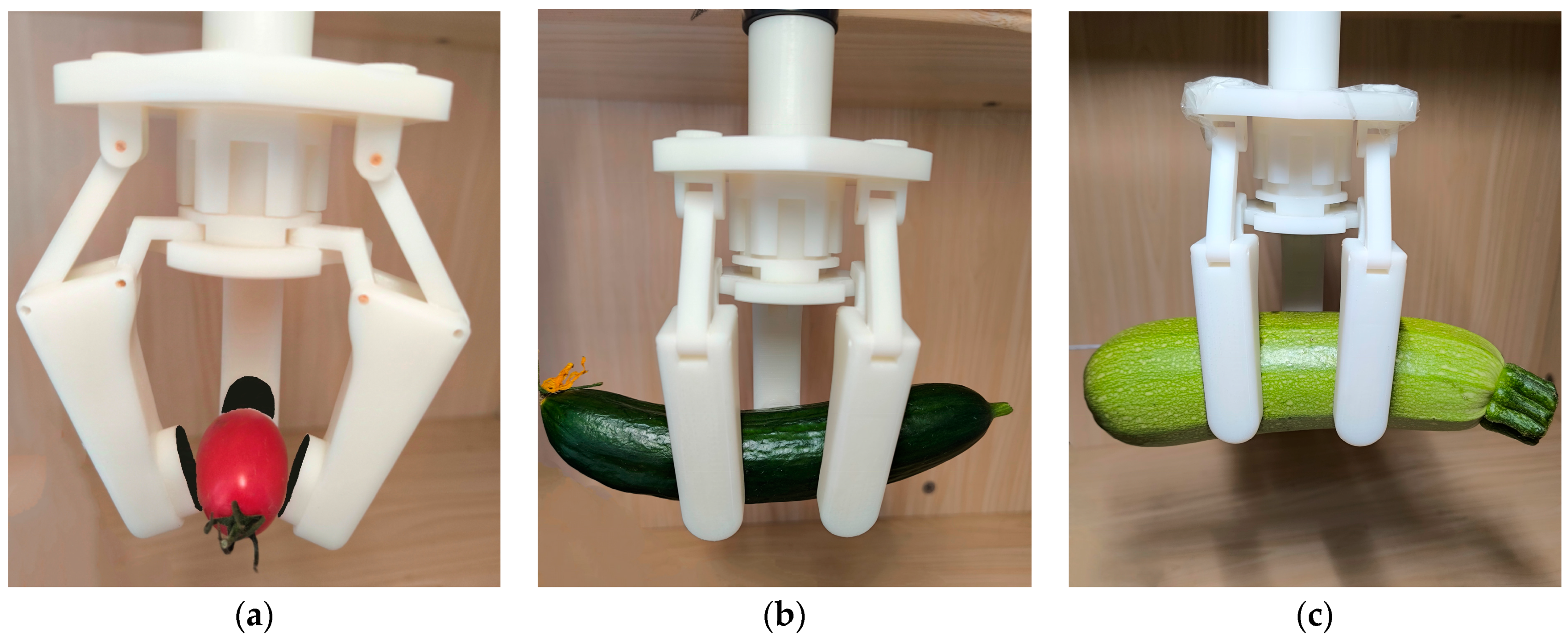
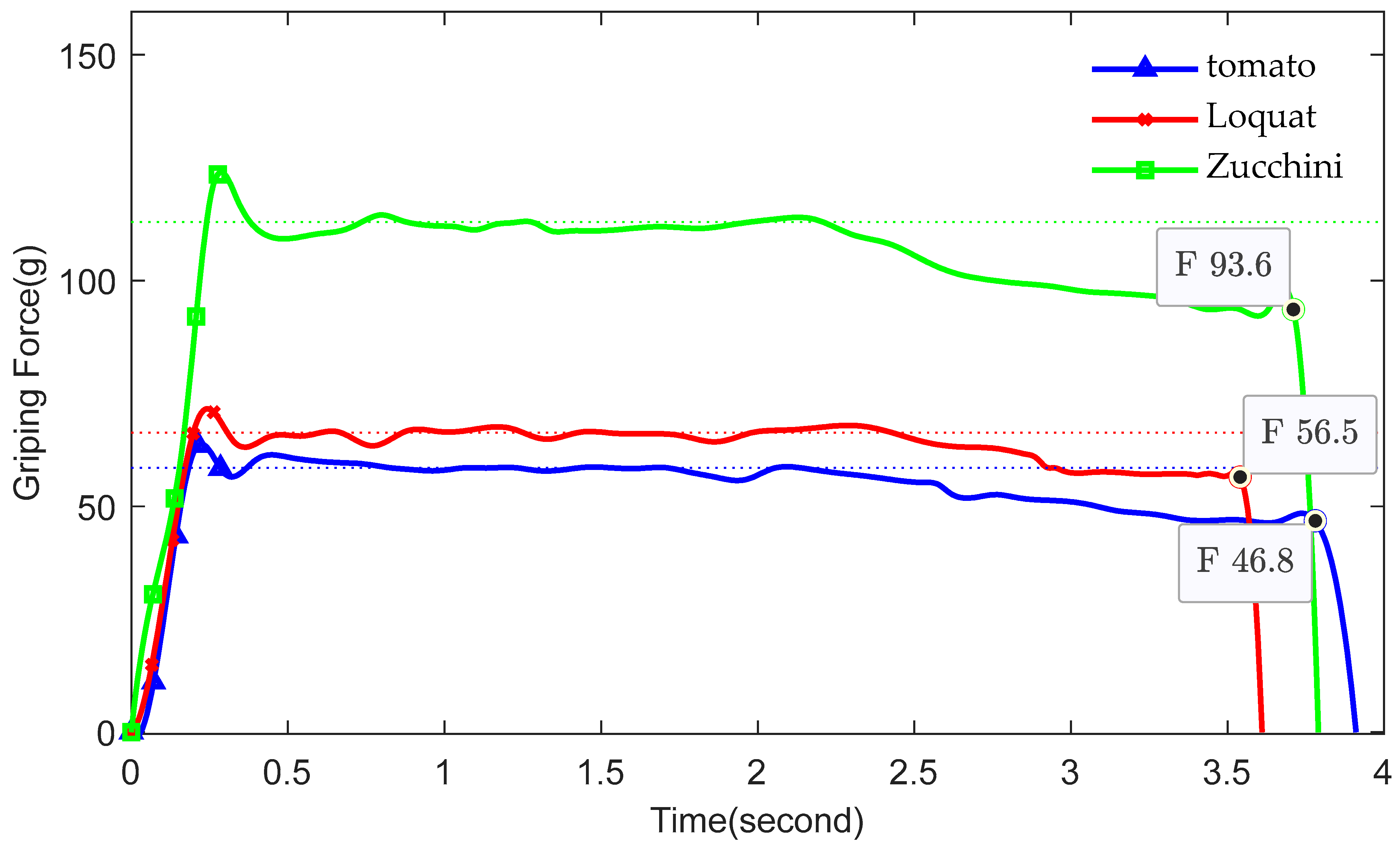
4. Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kovarikova, Z.; Duchon, F.; Trebula, M.; Nagy, F.; Dekan, M.; Labat, D.; Babinec, A. Prototyping an intelligent robotic welding workplace by a cyber-physic tool. Int. J. Adv. Manuf. Tech. 2023, 125, 4855–4882. [Google Scholar] [CrossRef]
- Wang, Z.J.; Zhu, B.C.; Yang, Y.; Li, Z.X. Research on Identifying Robot Collision Points in Human–Robot Collaboration Based on Force Method Principle Solving. Actuators 2023, 12, 320. [Google Scholar] [CrossRef]
- Li, Z.; Li, S.; Luo, X. A Novel Machine Learning System for Industrial Robot Arm Calibration. IEEE Trans. Circuits Syst. II Express Briefs 2024, 71, 2364–2368. [Google Scholar] [CrossRef]
- Bonci, A.; Gaudeni, F.; Giannini, M.C.; Longhi, S. Robot Operating System 2 (ROS2)-Based Frameworks for Increasing Robot Autonomy: A Survey. Appl. Sci. 2023, 13, 12796. [Google Scholar] [CrossRef]
- Zhang, D.; Hu, J.B.; Cheng, J.; Wu, Z.G.; Yan, H.C. A Novel Disturbance Observer Based Fixed-Time Sliding Mode Control for Robotic Manipulators with Global Fast Convergence. IEEE/CAA J. Autom. Sin. 2024, 11, 661–672. [Google Scholar] [CrossRef]
- Zhang, J.; Kang, N.B.; Qu, Q.J.; Zhou, L.H.; Zhang, H.B. Automatic fruit picking technology: A comprehensive review of research advances. Artif. Intell. Rev. 2024, 57, 54. [Google Scholar] [CrossRef]
- Wang, Z.H.; Xun, Y.; Wang, Y.K.; Yang, Q.H. Review of smart robots for fruit and vegetable picking in agriculture. Int. J. Agric. Biol. Eng. 2022, 15, 33–54. [Google Scholar]
- Zhang, B.H.; Xie, Y.X.; Zhou, J.; Wang, K.; Zhang, Z. State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review. Comput. Electron. Agric. 2020, 177, 105694. [Google Scholar] [CrossRef]
- Trung, T.V.; Iwasaki, M. Fast and precise positioning with coupling torque compensation for a flexible lightweight two-link manipulator with elastic joints. IEEE/ASME Trans. Mechatronics 2023, 28, 1025–1036. [Google Scholar]
- Cheng, C.; Fu, J.; Su, H.; Ren, L.Q. Recent Advancements in Agriculture Robots: Benefits and Challenges. Machines 2023, 11, 48. [Google Scholar] [CrossRef]
- Xu, X.; Wang, Y.N.; Jiang, Y.M. Review of Research Advances in Fruit and Vegetable Harvesting Robots. J. Electr. Eng. Technol. 2024, 19, 773–789. [Google Scholar]
- Rong, J.C.; Wang, P.B.; Wang, T.J.; Hu, L.; Yuan, Y. Fruit pose recognition and directional orderly grasping strategies for tomato harvesting robots. Comput. Electron. Agric. 2022, 202, 107430. [Google Scholar] [CrossRef]
- Gorjian, S.; Ebadi, H.; Trommsdorff, M.; Sharon, H.; Demant, M.; Schindele, S. The advent of modern solarpowered electric agricultural machinery: A solution for sustainable farm operations. J. Clean. Prod. 2021, 292, 126030. [Google Scholar] [CrossRef]
- Zahidi, U.A.; Khan, A.; Zhivkov, T.; Dichtl, J.; Li, D.; Parsa, S.; Hanheide, M.; Cielniak, G.; Sklar, E.I.; Pearson, S.; et al. Optimising robotic operation speed with edge computing via 5G network: Insights from selective harvesting robots. J. Field Robot. 2024, 1–19. [Google Scholar] [CrossRef]
- Feng, J.T.; Yang, Q.Y.; Tian, H.; Wang, Z.P.; Tian, S.J.; Xu, H.R. Promising real-time fruit and vegetable quality detection technologies applicable to manipulator picking process. Int. J. Agric. Biol. Eng. 2024, 17, 14–26. [Google Scholar]
- Nie, H.; Zhao, Z.; Chen, L.; Lu, Z.; Li, Z.; Yang, J. Smaller and Faster Robotic Grasp Detection Model via Knowledge Distillation and Unequal Feature Encoding. IEEE Robot. Autom. Let. 2024, 9, 7206–7213. [Google Scholar] [CrossRef]
- Sánchez-Molina, J.A.; Rodríguez, F.; Moreno, J.C.; Sánchez-Hermosilla, J.; Giménez, A. Robotics in greenhouses. Scoping review. Comput. Electron. Agric. 2024, 219, 108750. [Google Scholar] [CrossRef]
- Wang, F.L.; Urquizo, R.C.; Roberts, P.; Mohan, V.; Newenham, C.; Ivanov, A.; Dowling, R. Biologically inspired robotic perception-action for soft fruit harvesting in vertical growing environments. Precis. Agric. 2023, 24, 1072–1096. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Yuan, X.; Wang, C. A review on structural development and recognition–localization methods for end-effector of fruit–vegetable picking robots. Int. J. Adv. Robot. Syst. 2022, 19, 17298806221104906. [Google Scholar] [CrossRef]
- Oliveira, F.; Tinoco, V.; Magalhães, S.; Santos, F.N.; Silva, M.F. End-Effectors for Harvesting Manipulators-State of the Art Review. In Proceedings of the 2022 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Santa Maria da Feira, Portugal, 29–30 April 2022. [Google Scholar]
- Xiong, Y.; Ge, Y.Y.; From, P.J. An obstacle separation method for robotic picking of fruits in clusters. Comput. Electron. Agric. 2020, 175, 105397. [Google Scholar] [CrossRef]
- Chappell, D.; Bello, F.; Kormushev, P.; Rojas, N. The Hydra Hand: A Mode-Switching Underactuated Gripper with Precision and Power Grasping Modes. IEEE Robot. Autom. Let. 2023, 8, 7599–7606. [Google Scholar] [CrossRef]
- Zhou, J.L.; Zhang, Y.Y.; Wang, J.P. A Dragon Fruit Picking Detection Method Based on YOLOv7 and PSP-Ellipse. Sensors 2023, 23, 3803. [Google Scholar] [CrossRef] [PubMed]
- Lu, Q.J.; Baron, N.; Clark, A.B.; Rojas, N. Systematic object-invariant in-hand manipulation via reconfigurable underactuation: Introducing the RUTH gripper. Int. J. Robot. Res. 2021, 40, 1329–1562. [Google Scholar] [CrossRef]
- Gu, L.H.; Huang, Q.J. Adaptive Impedance Control for Force Tracking in Manipulators Based on Fractional-Order PID. Appl. Sci. 2023, 13, 10267. [Google Scholar] [CrossRef]
- Torielli, D.; Bertoni, L.; Fusaro, F.; Tsagarakis, N.; Muratore, L. ROS End-Effector: A Hardware-Agnostic Software and Control Framework for Robotic End-Effectors. J. Intell. Robot. Syst. 2023, 108, 70. [Google Scholar] [CrossRef]
- Ceccarelli, M. Fundamentals of Mechanics of Robotic Manipulation, 2nd ed.; Springer: Cham, Switzerland, 2022; pp. 323–341. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Viable | Min (mm) | Max (mm) |
|---|---|---|
| l1 | 30 | 60 |
| l2 | 15 | 20 |
| r | 30 | 30 |
| Index | ABS | Rubber |
|---|---|---|
| Yield strength (MPa) | 50 | 9.23737 |
| Tensile strength (MPa) | 30 | 13.7817 |
| Modulus of elasticity (N/m2) | 2 × 109 | 6.1 × 106 |
| Poisson’s ratio | 0.394 | 0.49 |
| Mass density (kg/m3) | 1020 | 1500 |
| Shear modulus (N/m2) | 3.189 × 108 | 2.9 × 106 |
| Object | Weight (g) | Max Diameter (mm) | Min Diameter (mm) | Grip Force (g) | Max Slip Force (g) |
|---|---|---|---|---|---|
| Loquat | 8 | 16.8 | 15.4 | - | - |
| Cherry | 15 | 23.5 | 22.4 | - | - |
| Citrus | 46 | 49.4 | 44.5 | 23.4 | - |
| Tomato | 116 | 68.5 | 64.6 | 58.5 | 46.8 |
| Yellow peach | 148 | 67.7 | 53.4 | 66.3 | 56.6 |
| Apple | 220 | 85.5 | 79.5 | 89.3 | 74.1 |
| Object | Weight (g) | Max Diameter (mm) | Length (mm) | Grip Force (g) | Max Slip Force (g) |
|---|---|---|---|---|---|
| Cherry2 | 13 | 23.2 | 51.5 | 5.07 | - |
| Loquat | 108 | 34.5 | 151.2 | 66.3 | 56.6 |
| Zucchini | 290 | 56.4 | 194.1 | 113.1 | 93.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Lv, M.; Xu, Q.; Xu, R. Design and Analysis of a Robotic Gripper Mechanism for Fruit Picking. Actuators 2024, 13, 338. https://doi.org/10.3390/act13090338
Xu Y, Lv M, Xu Q, Xu R. Design and Analysis of a Robotic Gripper Mechanism for Fruit Picking. Actuators. 2024; 13(9):338. https://doi.org/10.3390/act13090338
Chicago/Turabian StyleXu, Yongpeng, Mingming Lv, Qian Xu, and Ruting Xu. 2024. "Design and Analysis of a Robotic Gripper Mechanism for Fruit Picking" Actuators 13, no. 9: 338. https://doi.org/10.3390/act13090338