

Data-Driven Feedforward Force Control of a Single-Acting Pneumatic Cylinder with a Nonlinear Hysteresis Characteristic

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- A data-driven neural network modeling method is presented to achieve accurate actuating force modeling and feedforward control.
- (2)
- The input layer of the neural network is analyzed to reveal the effect of different elements on the accuracy of the neural network model in modeling the actuating force, which could provide a reference for studying the modeling and control mechanisms of a single-acting pneumatic system.
- (3)
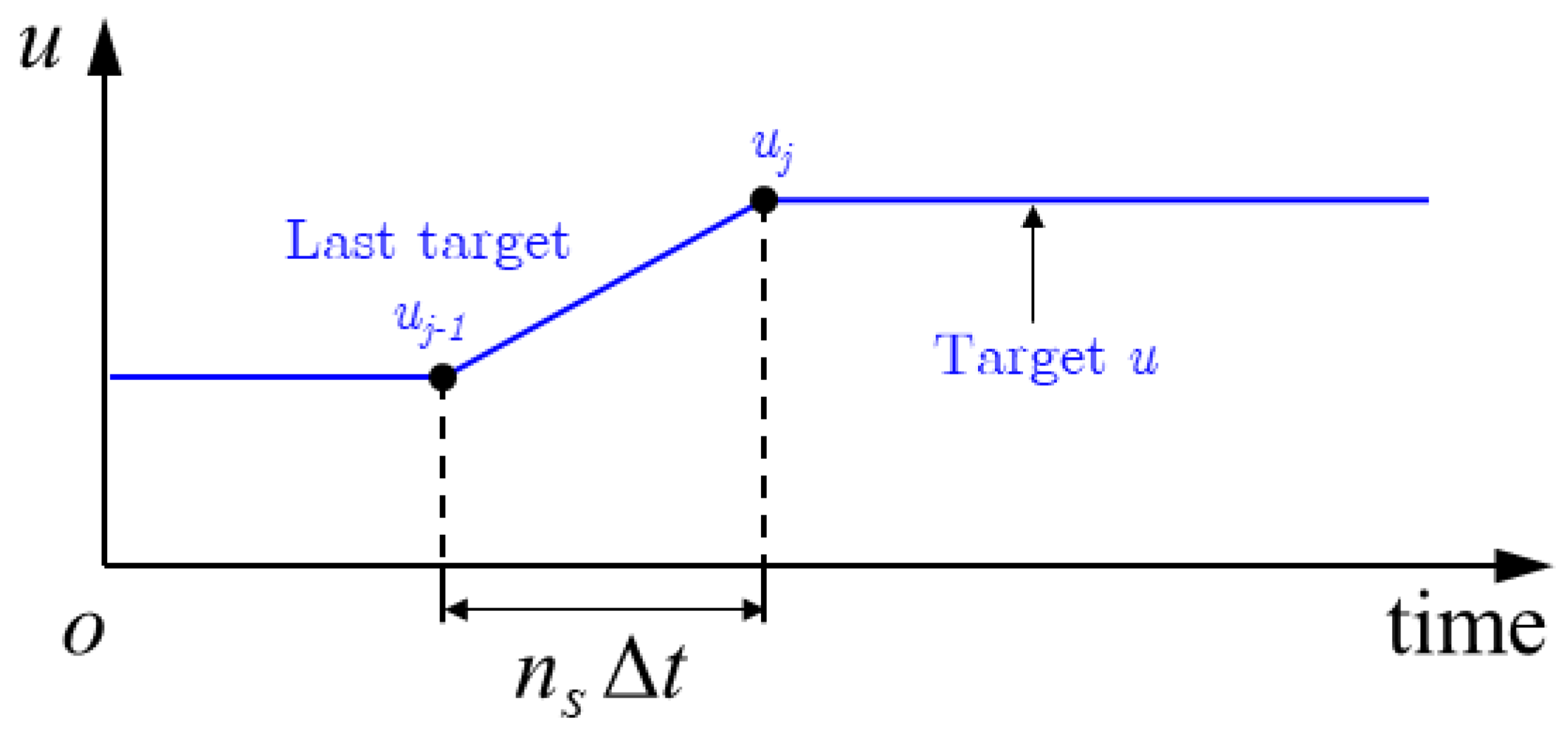
- An instruction smoothing method for feedforward step force control is proposed to enhance the open-loop actuating force control performance of the single-acting pneumatic system.
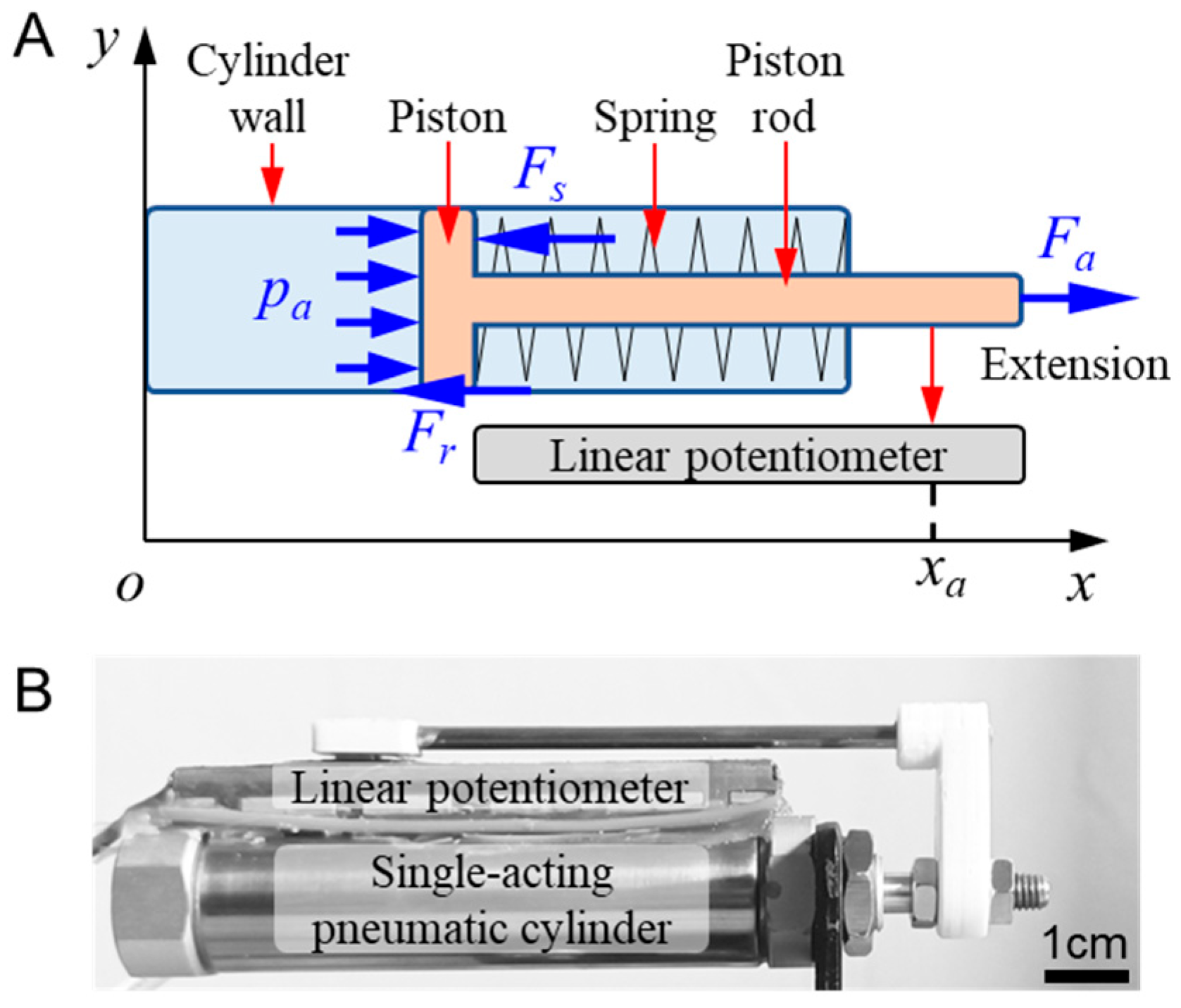
2. Pneumatic Force Control System
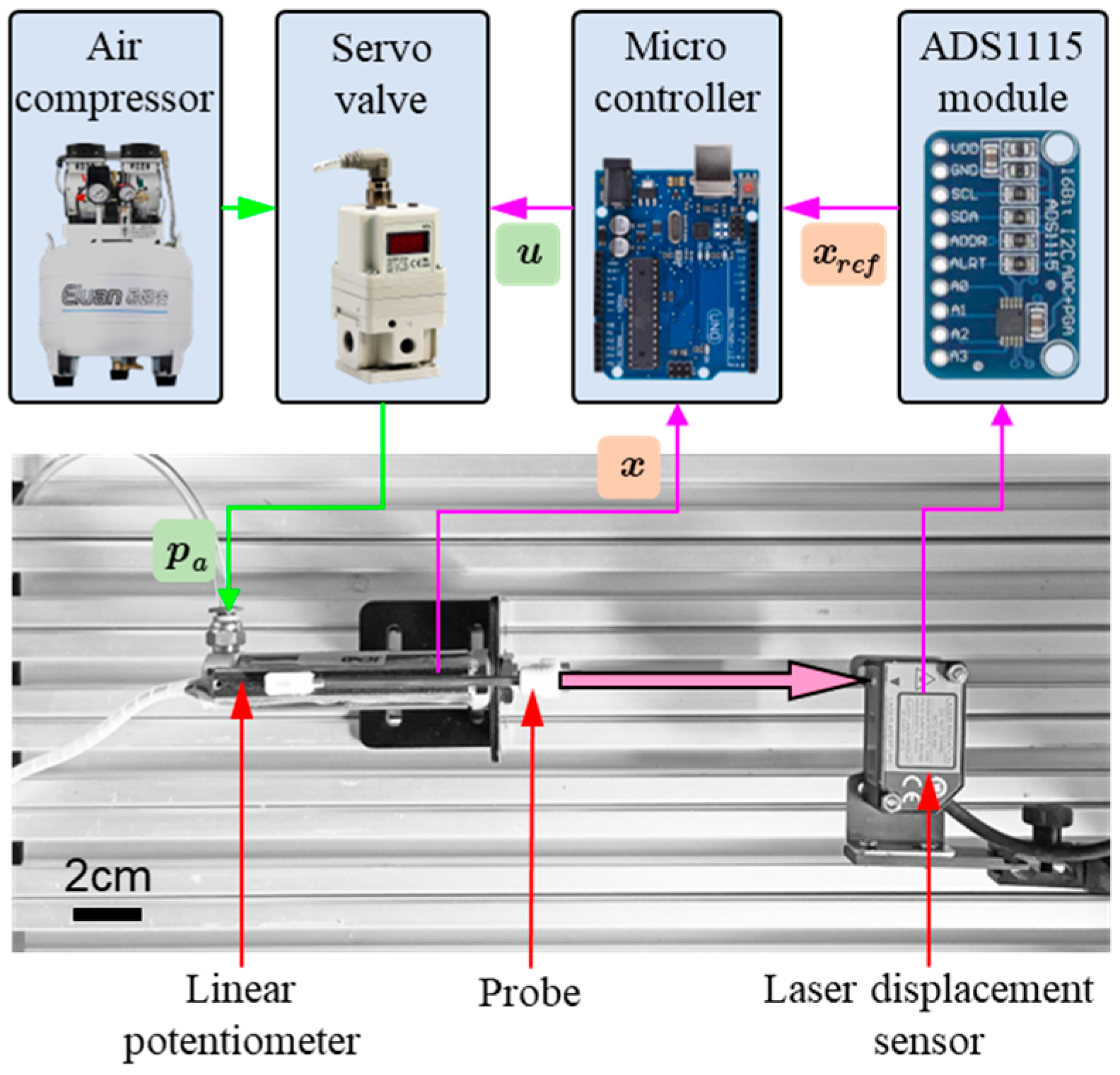
2.1. Hardware Description
2.2. Problem Description
3. Neural Network Modeling
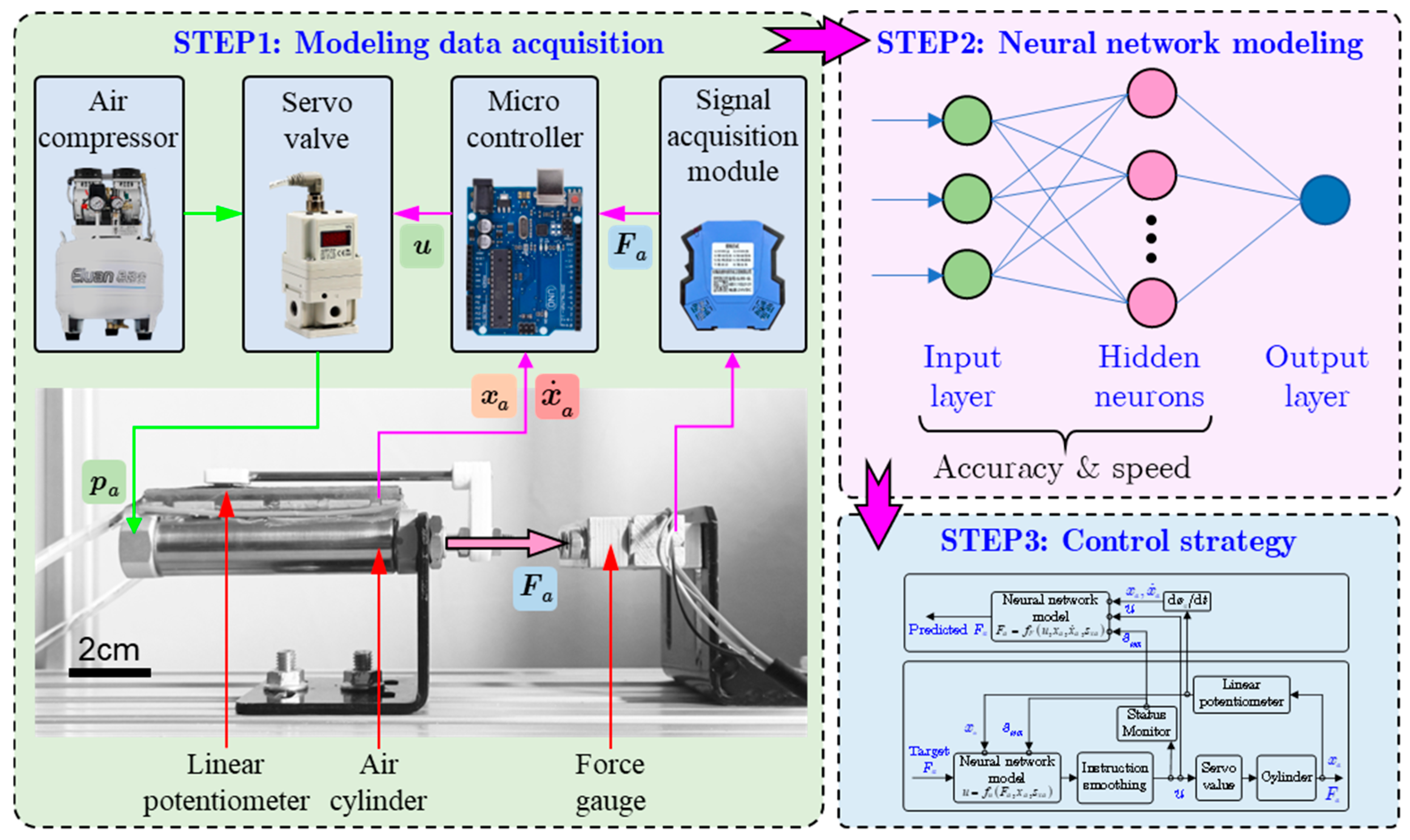
- (1)
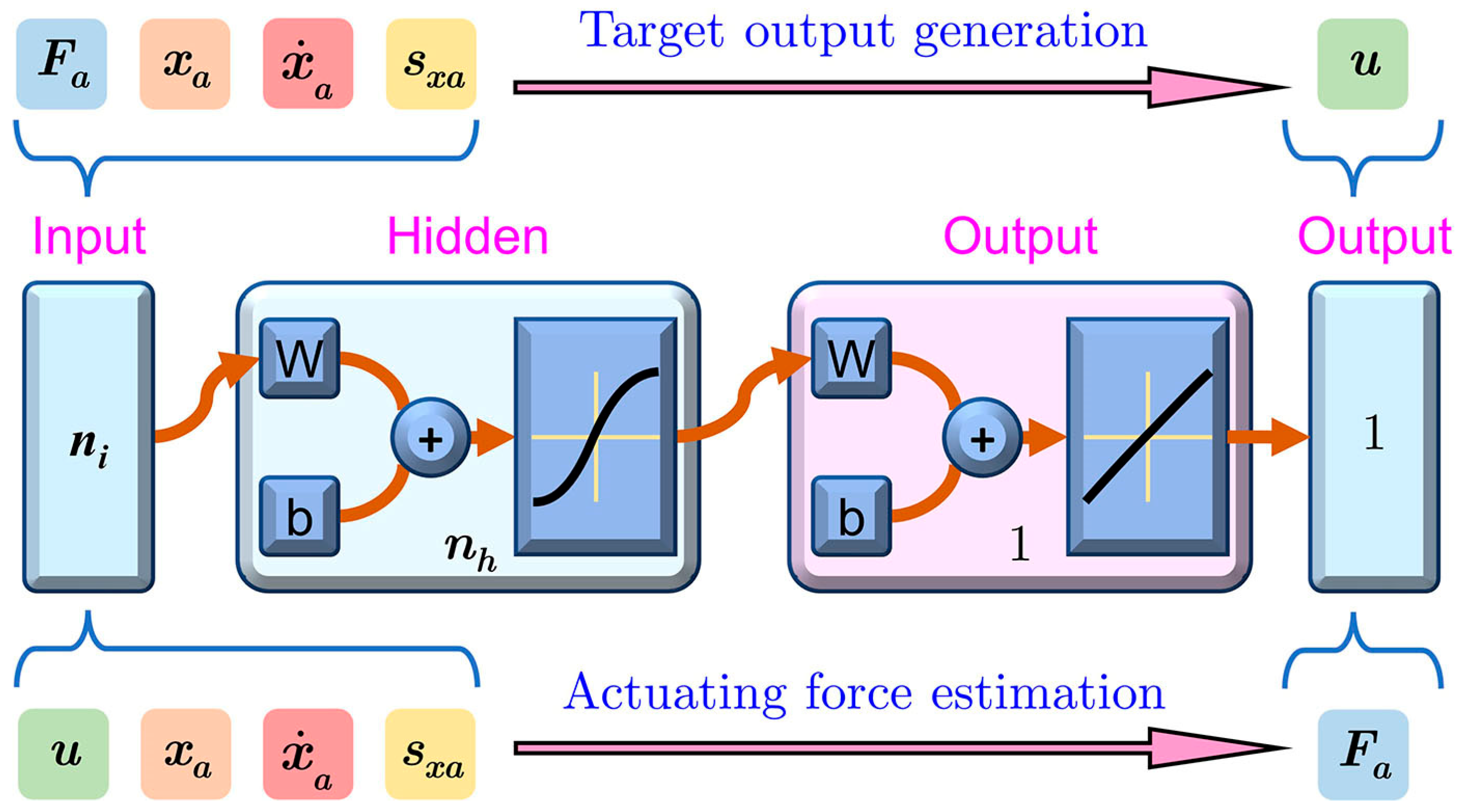
- Data acquisition. Sampe the essential data for the input and output layers of the neural network model according to Equations (5) and (6).
- (2)
- Neural network modeling and analysis. Train and obtain an optimal neural network model based on the data from the input and output layers. Since execution speed is an essential requirement for real-time control, a larger dimension of the input layer and a greater number of hidden neurons could lead to a reduction in the real-time execution speed. Therefore, the effects of different input layer designs and different numbers of hidden neurons on modeling accuracy and execution speed will be quantitatively evaluated to obtain an optimal balance between the modeling accuracy and real-time execution speed.
- (3)
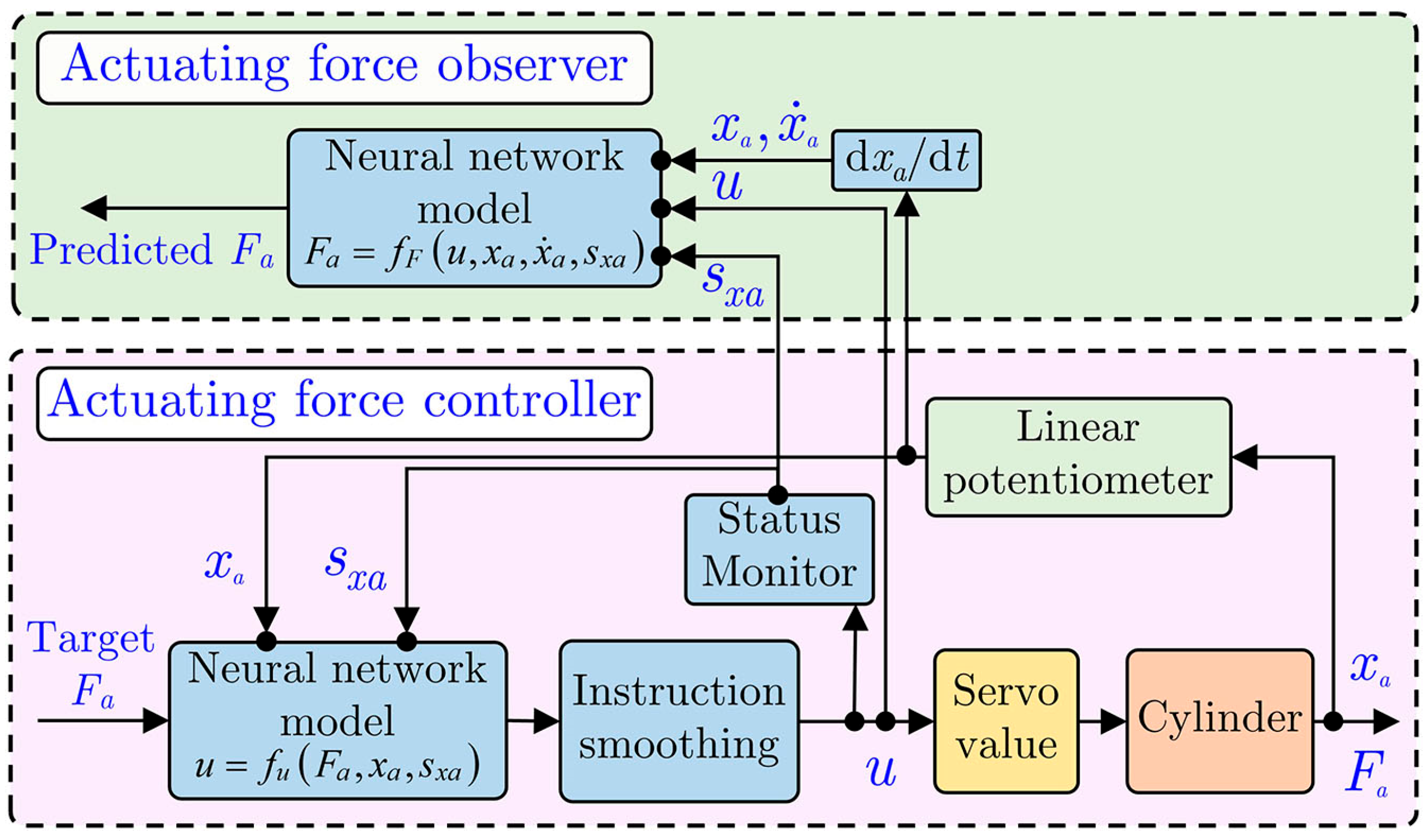
- Control strategy design. Construct the control strategy for the feedforward actuating force control based on the neural network model.
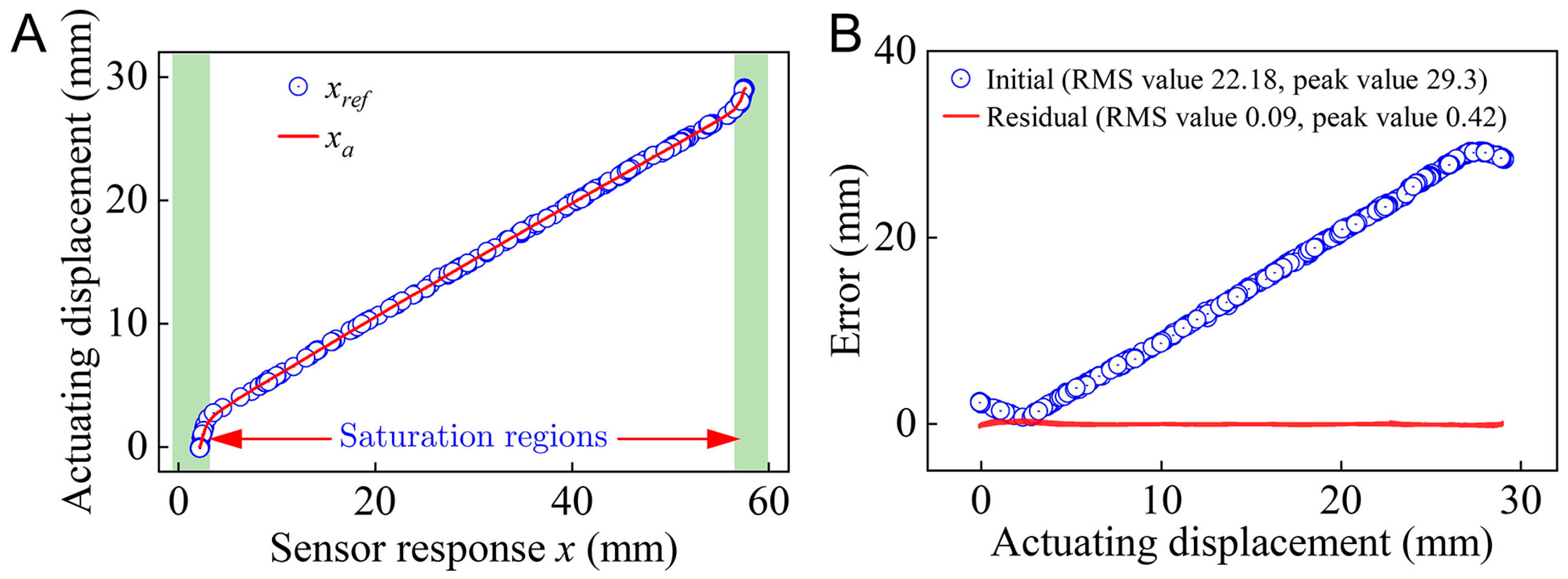
3.1. Experimental Setup
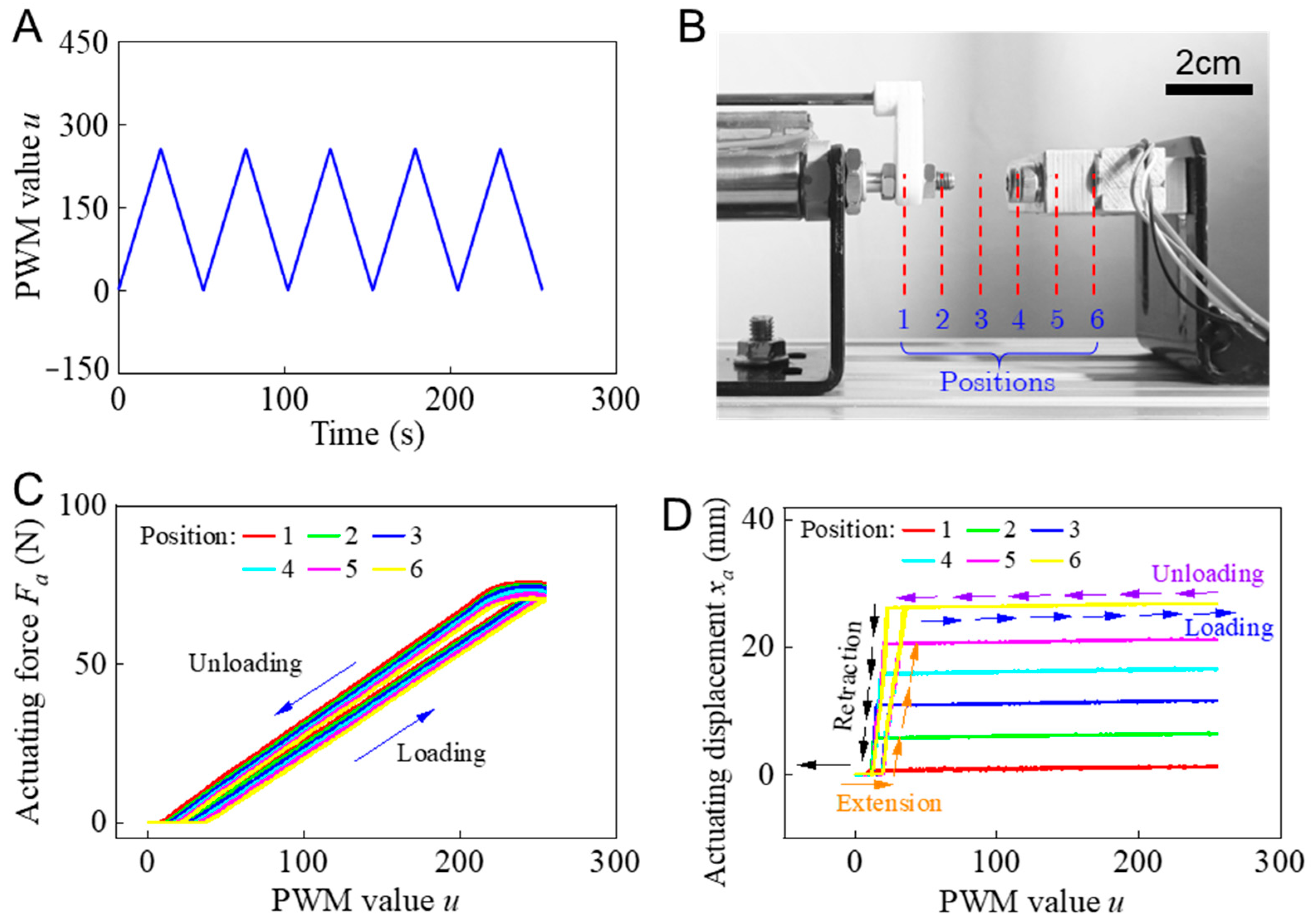
3.2. Data Acquisition
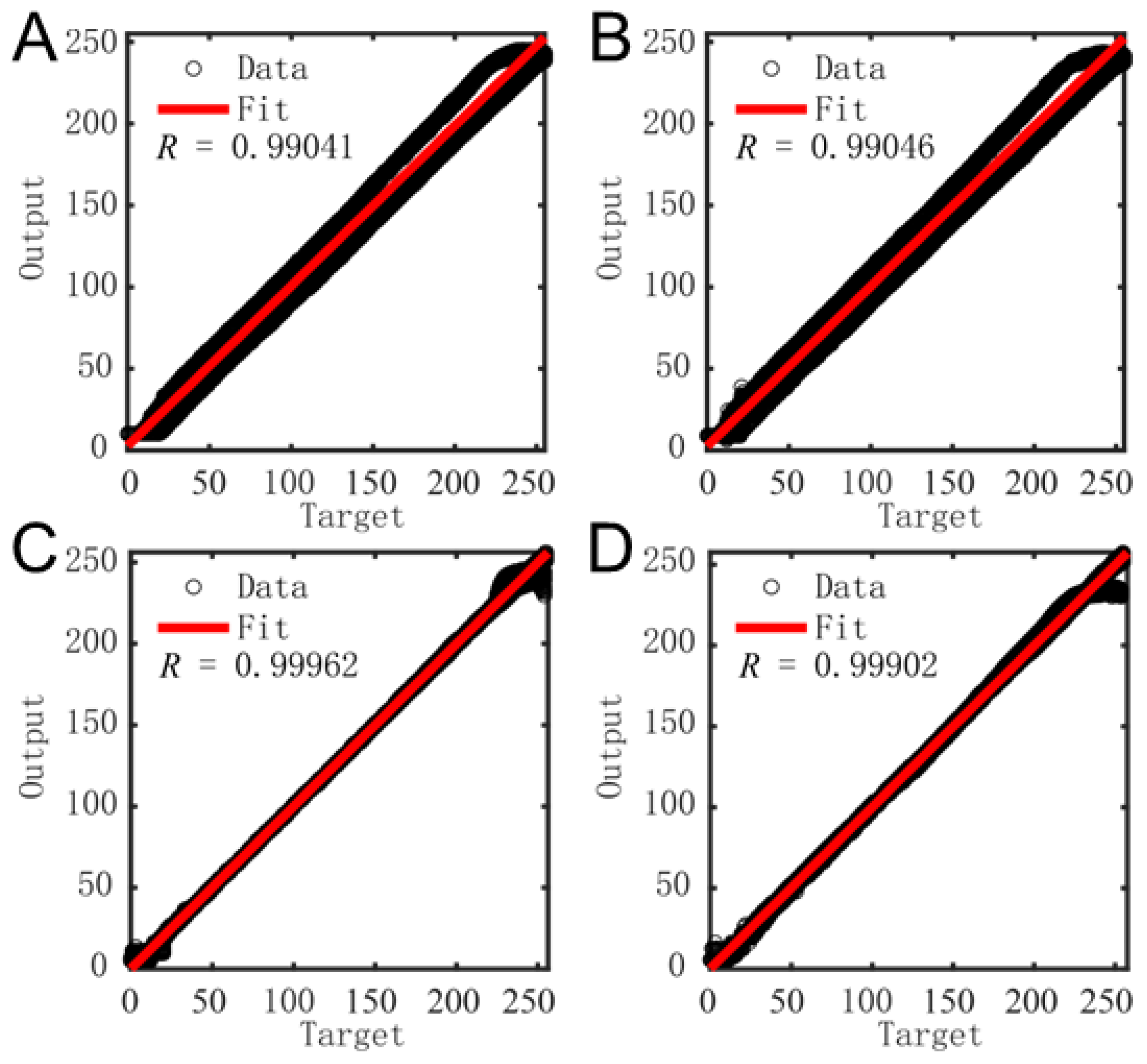
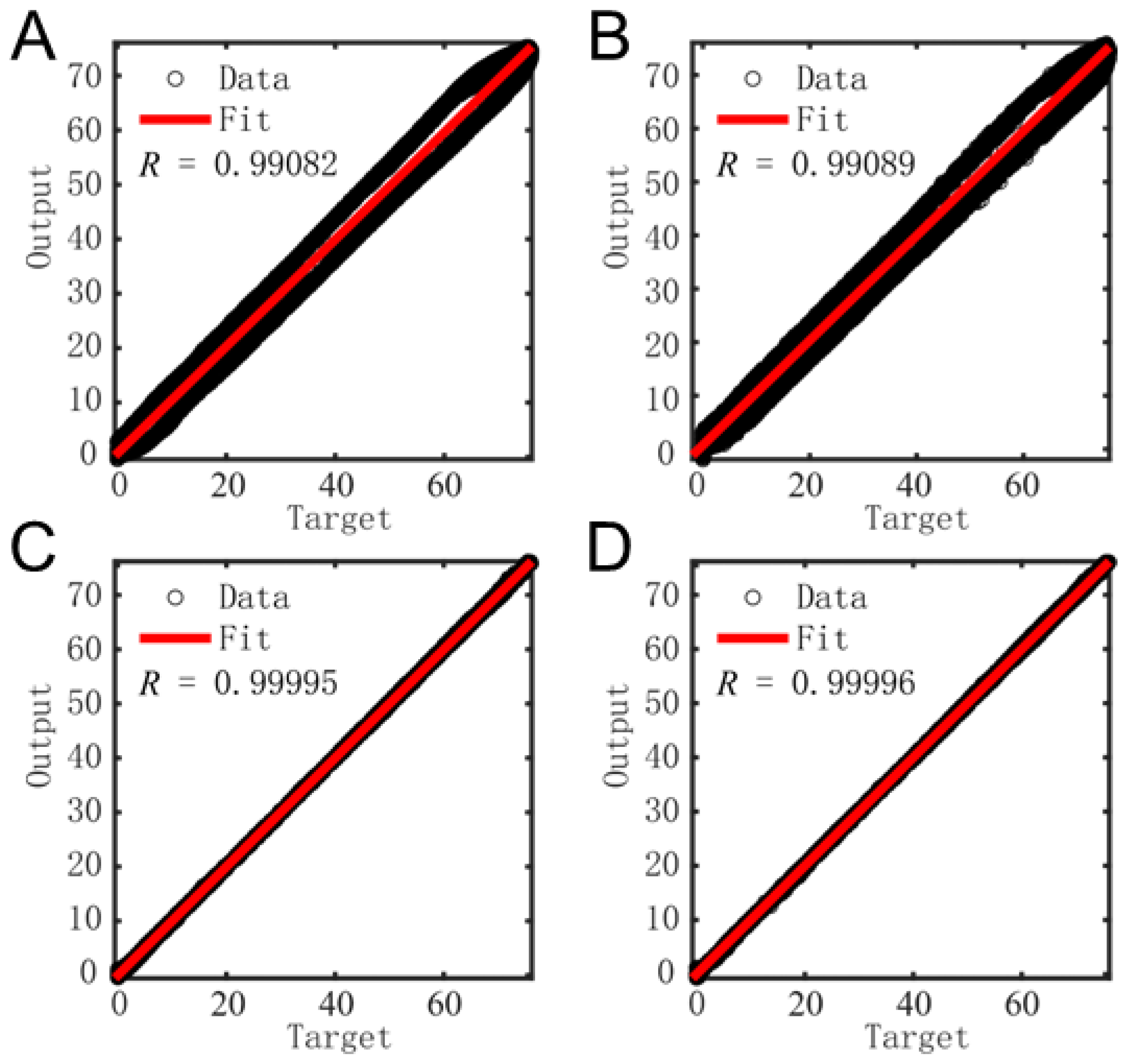
3.3. Neural Network Structure Analysis
- (1)
- Input layer design
- (2)
- Computing cost
3.4. Feedforward Control Strategy
4. Experimental Results and Discussion
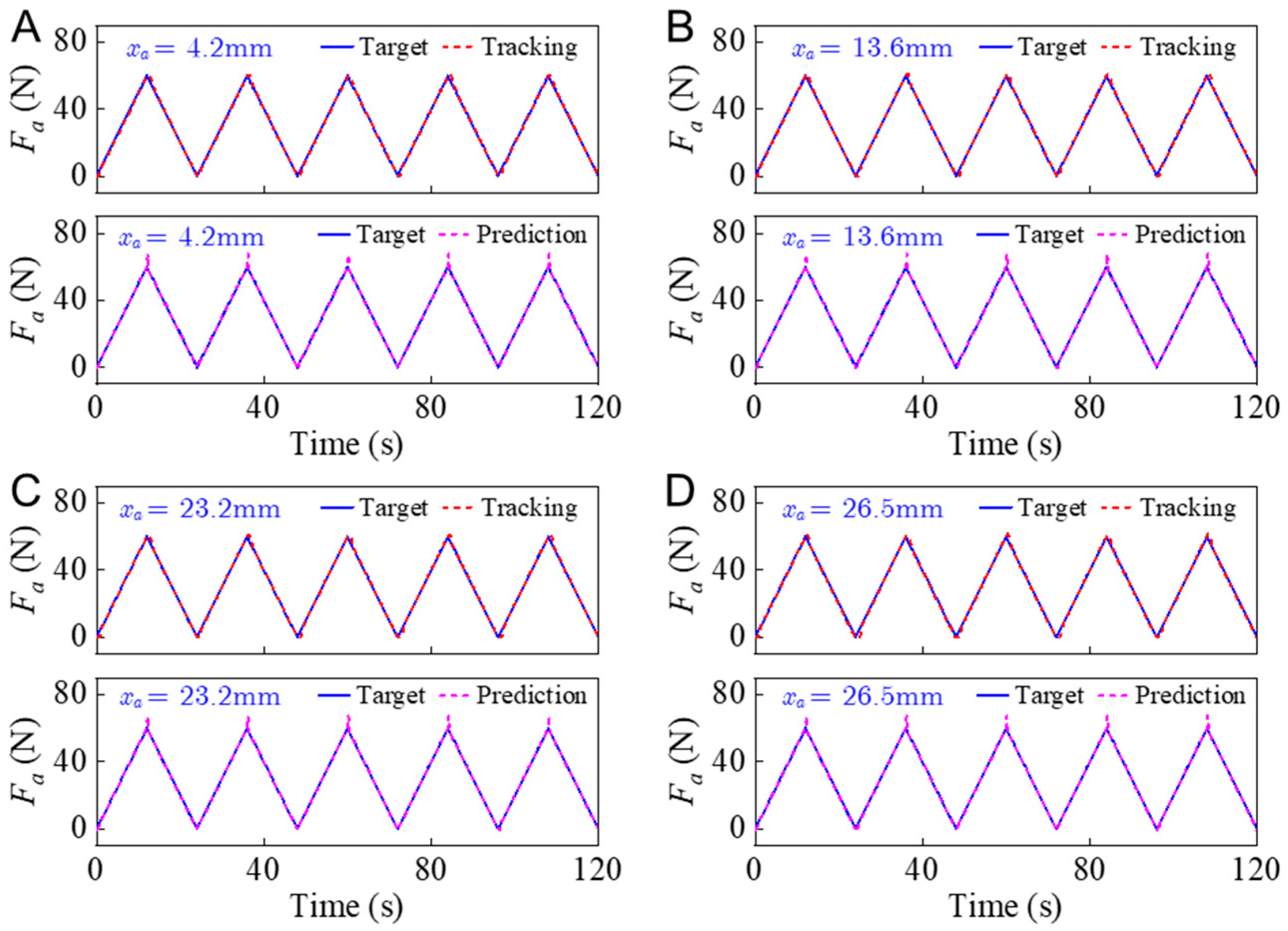
4.1. Actuating Force Tracking Control
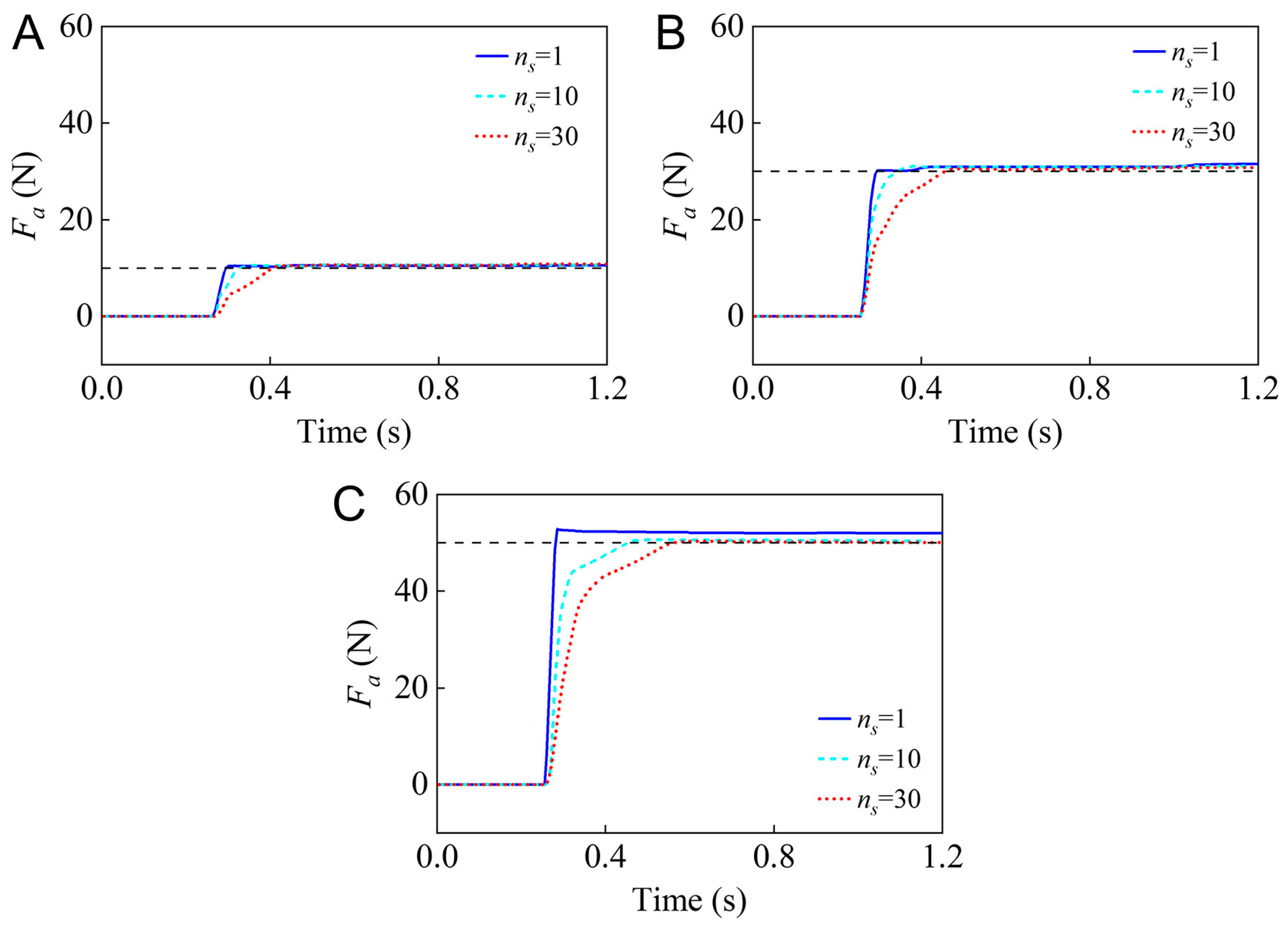
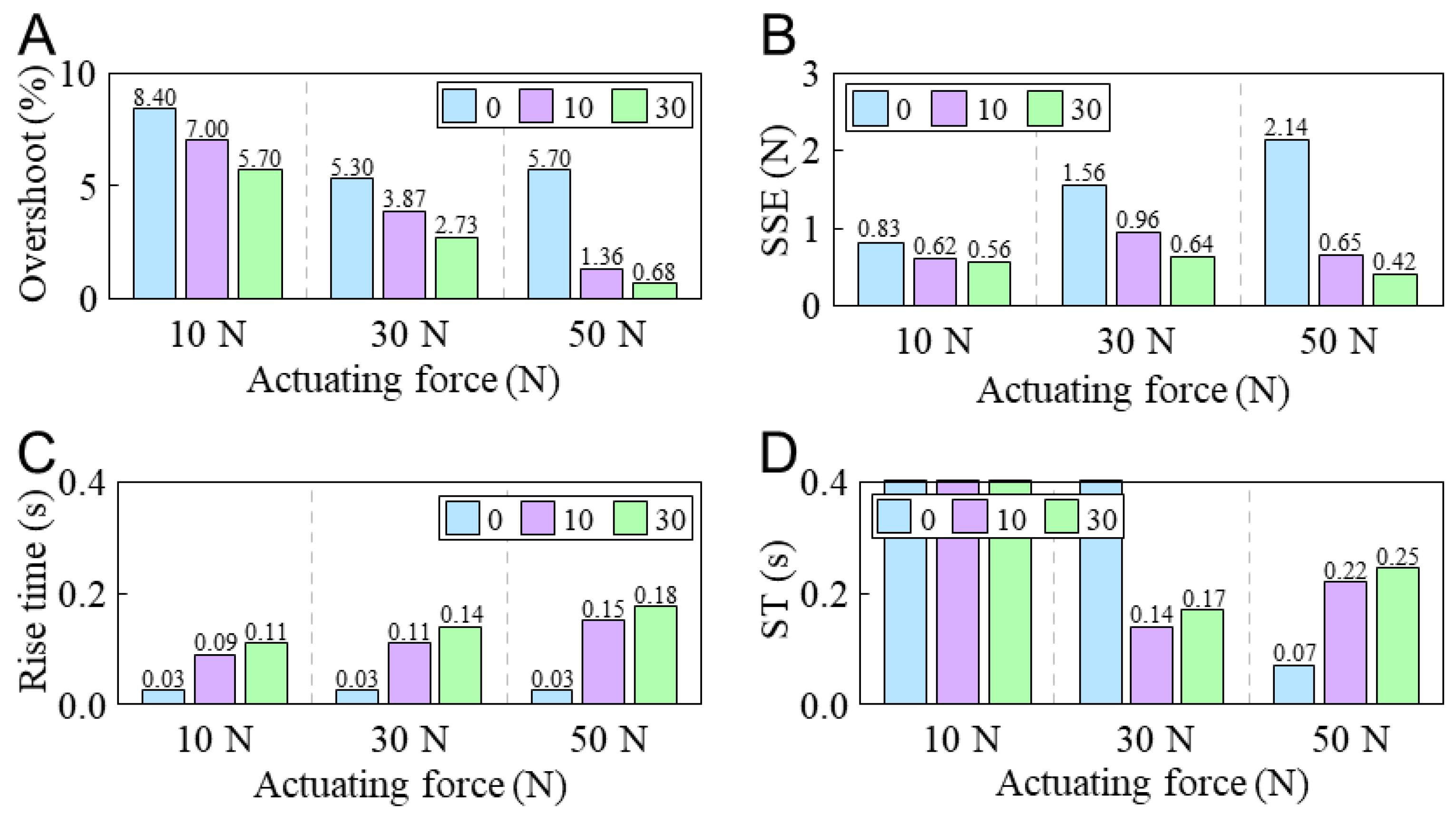
4.2. Step Force Control
5. Conclusions
- (1)
- The established neural network models of the actuating force can be executed on a microcontroller within 2 ms, thereby fulfilling the real-time requirement in actuating force control.
- (2)
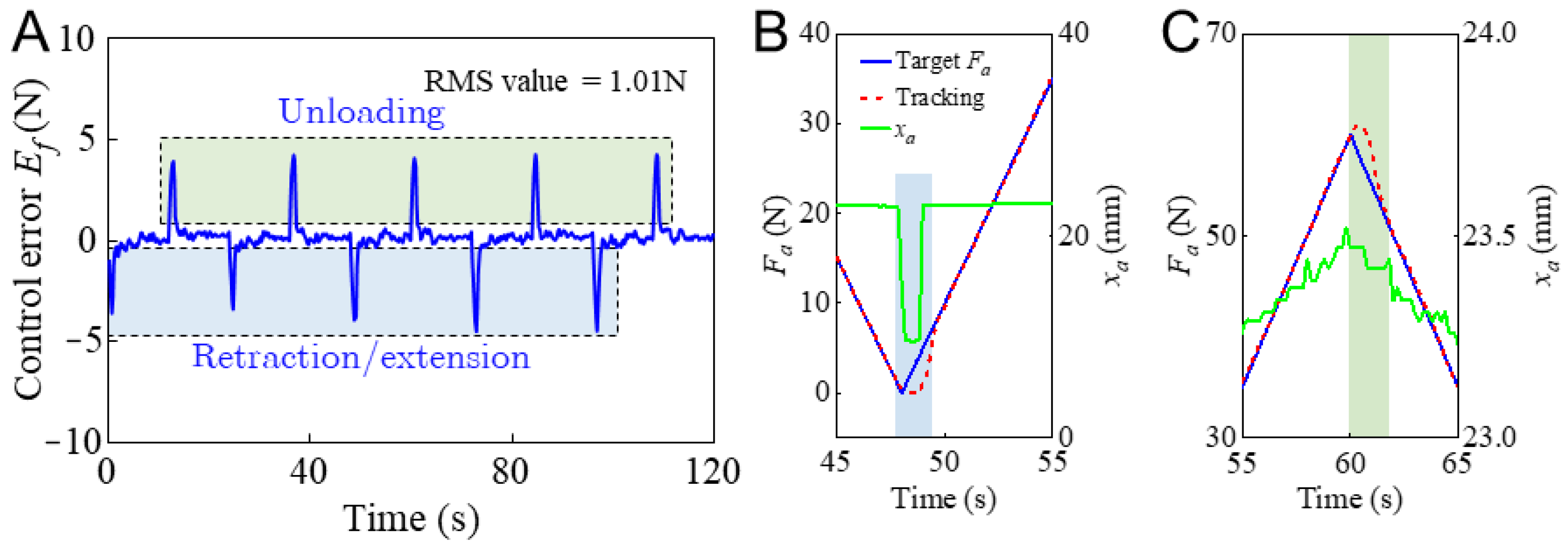
- The actuating force can achieve ideal tracking of the target via a feedforward approach. In the loading and unloading processes, the amplitude of the control error is less than 0.5 N. The overall RMS value of the control error is about 1 N.
- (3)
- In step force control, a larger step variation of the target can lead to an increase in the steady-state error and affect the control accuracy. An instruction smoothing operation can reduce the percent overshoot and steady-state error of the feedforward step actuating force control.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Dong, J.; Shi, J.; Liu, C.; Yu, T. Research of Pneumatic Polishing Force Control System Based on High Speed On/off with PWM Controlling. Robot. Comput. Integr. Manuf. 2021, 70, 102133. [Google Scholar]
- Li, J.; Guan, Y.; Chen, H.; Wang, B.; Zhang, T.; Liu, X.; Hong, J.; Wang, D.; Zhang, H. A High-Bandwidth End-Effector with Active Force Control for Robotic Polishing. IEEE Access 2020, 8, 169122–169135. [Google Scholar] [CrossRef]
- Fan, C.; Hong, G.S.; Zhao, J.; Zhang, L.; Zhao, J.; Sun, L. The integral sliding mode control of a pneumatic force servo for the polishing process. Precis. Eng. 2019, 55, 154–170. [Google Scholar] [CrossRef]
- Kakogawa, A.; Kaizu, Y.; Ma, S. Sensor-Less and Control-Less Underactuated Grippers with Pull-In Mechanisms for Grasping Various Objects. Front. Robot. AI 2021, 8, 631242. [Google Scholar]
- Zhang, B.; Xie, Y.; Zhou, J.; Wang, K.; Zhang, Z. State-of-the-art robotic grippers, grasping and control strategies, as well as their applications in agricultural robots: A review. Comput. Electron. Agric. 2020, 177, 105694. [Google Scholar]
- Zhong, G.; Hou, Y.; Dou, W. A soft pneumatic dexterous gripper with convertible grasping modes. IJMS 2019, 153–154, 445–456. [Google Scholar]
- Yanqiong, F.; Jiangbei, W.; Wu, P. A Novel Fabric-Based Versatile and Stiffness-Tunable Soft Gripper Integrating Soft Pneumatic Fingers and Wrist. Soft Robot. 2019, 6, 1–20. [Google Scholar]
- Tanaka, K.; Nishikawa, S.; Niiyama, R. Kuniyoshi, Immediate generation of jump-and-hit motions by a pneumatic humanoid robot using a lookup table of learned dynamics. IEEE Robot. Autom. Lett. 2021, 6, 5557–5564. [Google Scholar]
- Ren, H.-P.; Jiao, S.-S.; Li, J.; Deng, Y. Adaptive neural network control of pneumatic servo system considering state constraints. Mech. Syst. Signal Process. 2022, 162, 107979. [Google Scholar]
- Li, X.; Yu, H.; Feng, H.; Zhang, S.; Fu, Y. Design and control for WLR-3P: A hydraulic wheel-legged robot. Cyborg Bionic Syst. 2023, 4, 0025. [Google Scholar]
- Wang, B.; Wang, Z.; Song, Y.; Zong, W.; Zhang, L.; Ji, K.; Manoonpong, P.; Dai, Z. A neural coordination strategy for attachment and detachment of a climbing robot inspired by gecko locomotion. Cyborg Bionic Syst. 2023, 4, 0008. [Google Scholar]
- Jiménez, M.; Kurmyshev, E.; Castaneda, C. Experimental study of double-acting pneumatic cylinder. Exp. Tech. 2020, 44, 355–367. [Google Scholar]
- Cheng, P.; Jia, J.; Ye, Y.; Wu, C. Modeling of a Soft-Rigid Gripper Actuated by a Linear-Extension Soft Pneumatic Actuator. Sensors 2021, 21, 493. [Google Scholar] [CrossRef] [PubMed]
- Azman, M.A.; Elnimair, M.O.; Hikmat, O.F.; Osman, K.; Kai, C.C. P-adaptive neuro-fuzzy and PD-fuzzy controller design for position control of a modified single acting pneumatic cylinder. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, NSW, Australia, 9–12 July 2013; pp. 176–181. [Google Scholar]
- Hua, H.; Liao, Z.; Wu, X.; Chen, Y.; Feng, C. A Back-drivable Linear Force Actuator for Adaptive Grasping. J. Mech. Sci. Technol. 2022, 36, 4213–4220. [Google Scholar]
- Hua, H.; Song, J.; Zhao, J.; Liao, Z. Sensor-less Grasping Force Control of a Pneumatic Underactuated Robotic Gripper. J. Mech. Robot. 2024, 16, 031005. [Google Scholar]
- Hamon, P.; Michel, L.; Plestan, F.; Chablat, D. Model-free based control of a gripper actuated by pneumatic muscles. Mechatronics 2023, 95, 103053. [Google Scholar]
- Chen, F.; Zhao, H.; Li, D.; Chen, L.; Tan, C.; Ding, H. Contact force control and vibration suppression in robotic polishing with a smart end effector. Robot. Comput. Integr. Manuf. 2019, 57, 391–403. [Google Scholar]
- Pei, G.; Yu, M.; Xu, Y.; Ma, C.; Lai, H.; Chen, F.; Lin, H. An Improved PID Controller for the Compliant Constant-Force Actuator Based on BP Neural Network and Smith Predictor. Appl. Sci. 2021, 11, 2685. [Google Scholar] [CrossRef]
- Mazare, M.; Taghizadeh, M.; Kazemi, M.G. Optimal hybrid scheme of dynamic neural network and PID controller based on harmony search algorithm to control a PWM-driven pneumatic actuator position. J. Vib. Control 2018, 24, 3538–3554. [Google Scholar]
- Jiang, X.; Wang, Z.; Zhang, C.; Yang, L. Fuzzy neural network control of the rehabilitation robotic arm driven by pneumatic muscles. Ind. Robot. Int. J. 2015, 42, 36–43. [Google Scholar]
- Chavoshian, M.; Taghizadeh, M.; Mazare, M. Hybrid dynamic neural network and PID control of pneumatic artificial muscle using the PSO algorithm. Int. J. Autom. Comput. 2020, 17, 428–438. [Google Scholar] [CrossRef]
- Zhao, L.; Zhang, B.; Yang, H.; Wang, Y. Observer-based integral sliding mode tracking control for a pneumatic cylinder with varying loads. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 2650–2658. [Google Scholar] [CrossRef]
- Krause, J.; Bhounsule, P. A 3D printed linear pneumatic actuator for position, force and impedance control. Actuators 2018, 7, 24. [Google Scholar] [CrossRef]
- Zhao, L.; Yang, Y.; Xia, Y.; Liu, Z. Active disturbance rejection position control for a magnetic rodless pneumatic cylinder. ITIE 2015, 62, 5838–5846. [Google Scholar] [CrossRef]
- Taheri, B.; Case, D.; Richer, E. Force and stiffness backstepping-sliding mode controller for pneumatic cylinders. IEEE/ASME Trans. Mechatron. 2014, 19, 1799–1809. [Google Scholar]
- Hua, H.; Liao, Z.; Wu, X.; Chen, Y. A Bezier based state calibrating method for low-cost potentiometer with inherent nonlinearity. Measurement 2021, 178, 109325. [Google Scholar] [CrossRef]
- Hua, H.; Wu, X.; Shi, N.; Zhang, J.; Zhao, C.; Zhu, Z. Design and evaluation of a novel dual-channel complementary potentiometer for rotation measurement. Measurement 2024, 230, 114548. [Google Scholar]
- Hua, H.; Liao, Z.; Song, J.; Liu, Y. A Sparse Piecewise Calibration Method for Potentiometer with Inherent Nonlinearity: A Comparison Study. Measurement 2022, 204, 112033. [Google Scholar] [CrossRef]
- Chen, Y.; Tao, G.; Liu, H. High Precision Adaptive Robust Neural Network Control of a Servo Pneumatic System. Appl. Sci. 2019, 9, 3472. [Google Scholar] [CrossRef]
- Li, Y.; Cao, Y.; Jia, F. A Neural Network Based Dynamic Control Method for Soft Pneumatic Actuator with Symmetrical Chambers. Actuators 2021, 10, 112. [Google Scholar] [CrossRef]
- Pham, V.-H.; Nguyen, T.-D.; Bui, T.-A. Behavior of Friction in Pneumatic Cylinders with Different Relative Humidity. Tribol. Ind. 2020, 42, 400. [Google Scholar] [CrossRef]
- Nguyen, T.-D.; Pham, V.-H. Study of the effects of relative humidity and velocity on the friction characteristics of pneumatic cylinders. Int. J. Mod. Phys. B 2020, 34, 2040139. [Google Scholar] [CrossRef]
- Hua, H.; Zhang, J.; Zhao, C.; Wu, Z.; Song, J.; Liao, Z. Prediction-Based Rapid Force Control of a Single-Acting Pneumatic Cylinder Under Hysteresis Nonlinearity. ISA Trans. 2025, 158, 686–696. [Google Scholar] [CrossRef] [PubMed]
- Turkseven, M.; Ueda, J. Model-based force control of pneumatic actuators with long transmission lines. IEEE/ASME Trans. Mechatron. 2018, 23, 1292–1302. [Google Scholar] [CrossRef]
- Banerjee, C.; Mukherjee, T.; Pasiliao, E., Jr. An empirical study on generalizations of the ReLU activation function. In Proceedings of the 2019 ACM Southeast Conference, Kennesaw, GA, USA, 18 April 2019; pp. 164–167. [Google Scholar]
- Gunawardane, P.D.S.H.; Cheung, P.; Zhou, H.; Alici, G.; de Silva, C.W.; Chiao, M. A versatile 3d-printable soft pneumatic actuator design for multi-functional applications in soft robotics. Soft Robot. 2024, 11, 709–723. [Google Scholar] [CrossRef]
- Le, X.T.; Gunawardane, P.H.; Mallikarachchi, S.; Chiao, M.; Godage, I.S. Hybrid Control of 3D-Printed Multimodal Soft Pneumatic Actuators. In Proceedings of the 2024 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2024; pp. 1753–1758. [Google Scholar]
- Yongkang, J.; Diansheng, C.; Che, L.; Jian, L. Chain-Like Granular Jamming: A Novel Stiffness-Programmable Mechanism for Soft Robotics. Soft Robot. 2019, 6, 118–132. [Google Scholar]
- Lubecki, M.; Stosiak, M.; Skačkauskas, P.; Karpenko, M.; Deptuła, A.; Urbanowicz, K. Development of composite hydraulic actuators: A review. Actuators 2022, 11, 365. [Google Scholar] [CrossRef]
- Yao, Z.; Xu, F.; Jiang, G.-P.; Yao, J. Data-driven control of hydraulic manipulators by reinforcement learning. IEEE/ASME Trans. Mechatron. 2023, 29, 2673–2684. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, X.; Hua, H.; Feng, S.; Zhao, Y.; Yang, Y.; Liao, Z. Data-Driven Feedforward Force Control of a Single-Acting Pneumatic Cylinder with a Nonlinear Hysteresis Characteristic. Actuators 2025, 14, 162. https://doi.org/10.3390/act14040162
Wu X, Hua H, Feng S, Zhao Y, Yang Y, Liao Z. Data-Driven Feedforward Force Control of a Single-Acting Pneumatic Cylinder with a Nonlinear Hysteresis Characteristic. Actuators. 2025; 14(4):162. https://doi.org/10.3390/act14040162
Chicago/Turabian StyleWu, Xiaofeng, Hongliang Hua, Songquan Feng, Yanli Zhao, Yuhong Yang, and Zhenqiang Liao. 2025. "Data-Driven Feedforward Force Control of a Single-Acting Pneumatic Cylinder with a Nonlinear Hysteresis Characteristic" Actuators 14, no. 4: 162. https://doi.org/10.3390/act14040162
APA StyleWu, X., Hua, H., Feng, S., Zhao, Y., Yang, Y., & Liao, Z. (2025). Data-Driven Feedforward Force Control of a Single-Acting Pneumatic Cylinder with a Nonlinear Hysteresis Characteristic. Actuators, 14(4), 162. https://doi.org/10.3390/act14040162