
Active Disturbance Rejection for Linear Induction Motors: A High-Order Sliding-Mode-Observer-Based Twisting Controller

Abstract
1. Introduction
2. Space-Vector State Model of LIM with Dynamic End Effects
3. Terminal Convergent Control Based on HOSMO
3.1. Extended Models
3.1.1. Flux Extended Model
3.1.2. Extended Velocity Model
3.2. High-Order Sliding Mode Observer Design
3.2.1. Observer Equations
3.2.2. Variable Definitions
3.2.3. Error Dynamics
3.2.4. Extended Error Dynamics
3.3. Terminal Convergent Control Design Based on HOSMO
3.3.1. Tracking Error Definition
3.3.2. Error Dynamics
3.3.3. Control Law Design
3.3.4. Closed-Loop Error Dynamics
3.3.5. Modified Control Laws
3.3.6. Resulting Error Dynamics
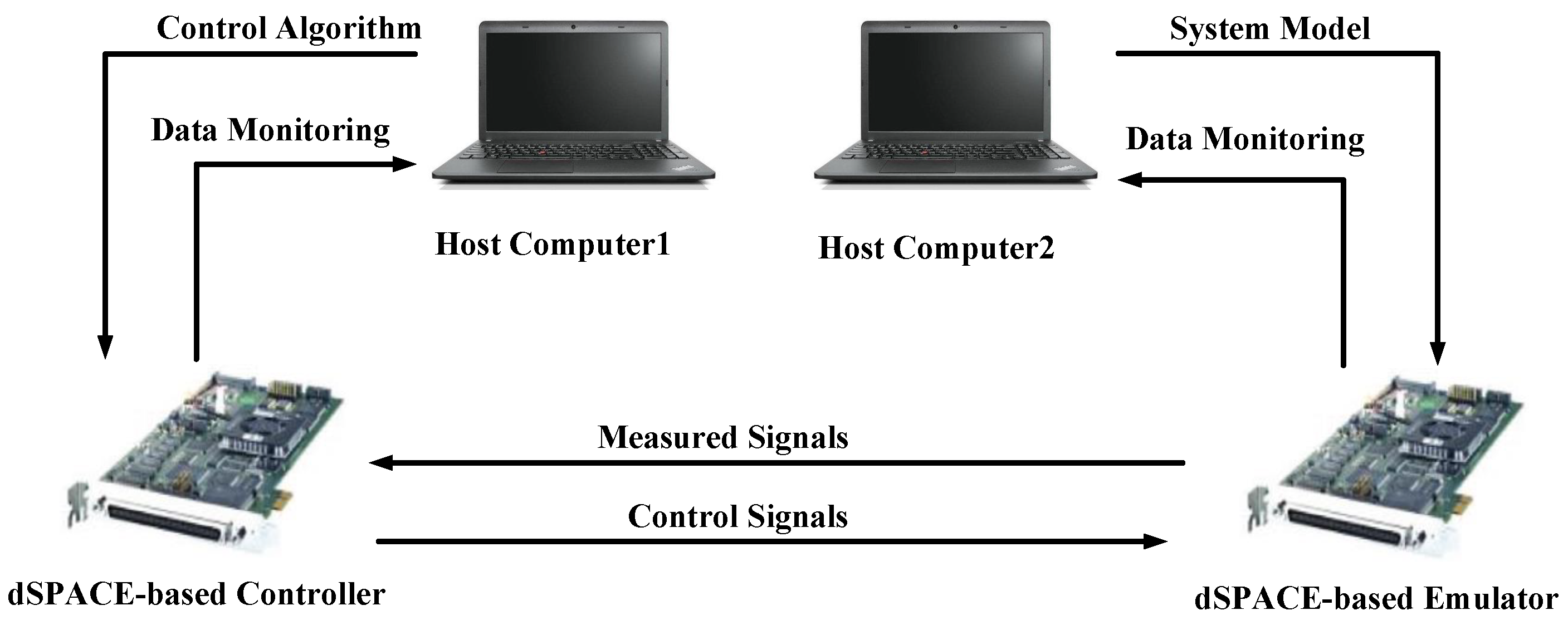
4. Hardware-in-the-Loop Experimental Validation
- Controller dSPACE DS1104: Implements the TC-HOSMO control algorithm at 10 kHz sampling rate.
- Emulator dSPACE DS1104: Simulates the LIM drive system at 10 kHz sampling rate, incorporating:
- –
- Dynamic end-effect model (Equations (1)–(6)). The specific steps are as follows: Firstly, the LIM model is validated using experimental data to ensure its accuracy and effectiveness. Secondly, a real-time simulation environment is established based on the selected processor and I/O module. This involves implementing the system model in software code to enable real-time execution. Finally, the system under test is connected to the simulator, ensuring that all signals are transmitted accurately. The necessary communication protocols are configured to facilitate seamless data exchange between the system and the simulator.
- –
- Park’s transformation is used for voltage and current coordinate conversion between three-phase stator and rotor reference frames. The process typically consists of two stages: first, converting three-phase quantities into a stationary reference frame using Clarke’s transformation, and second, applying a rotational transformation to map these quantities into the dq frame synchronized with the rotor’s electrical position. This approach enhances dynamic performance, reduces computational complexity, and improves stability in modern motor drives, renewable energy systems, and power electronics applications. The nominal parameters of the LIM are shown in the Table 2.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Stator resistance, | 11 |
| Secondary resistance, | 32.57 |
| Stator inductance, | 0.6376 H |
| Magnetizing inductance, | 0.5175 H |
| Secondary inductance, | 0.7578 H |
| Primary mass, M | 20 kg |
| Viscous friction coefficient, D | 20 N·s/m |
| Number of pole pairs, | 3 |
| Pole pitch, h | 0.1 m |
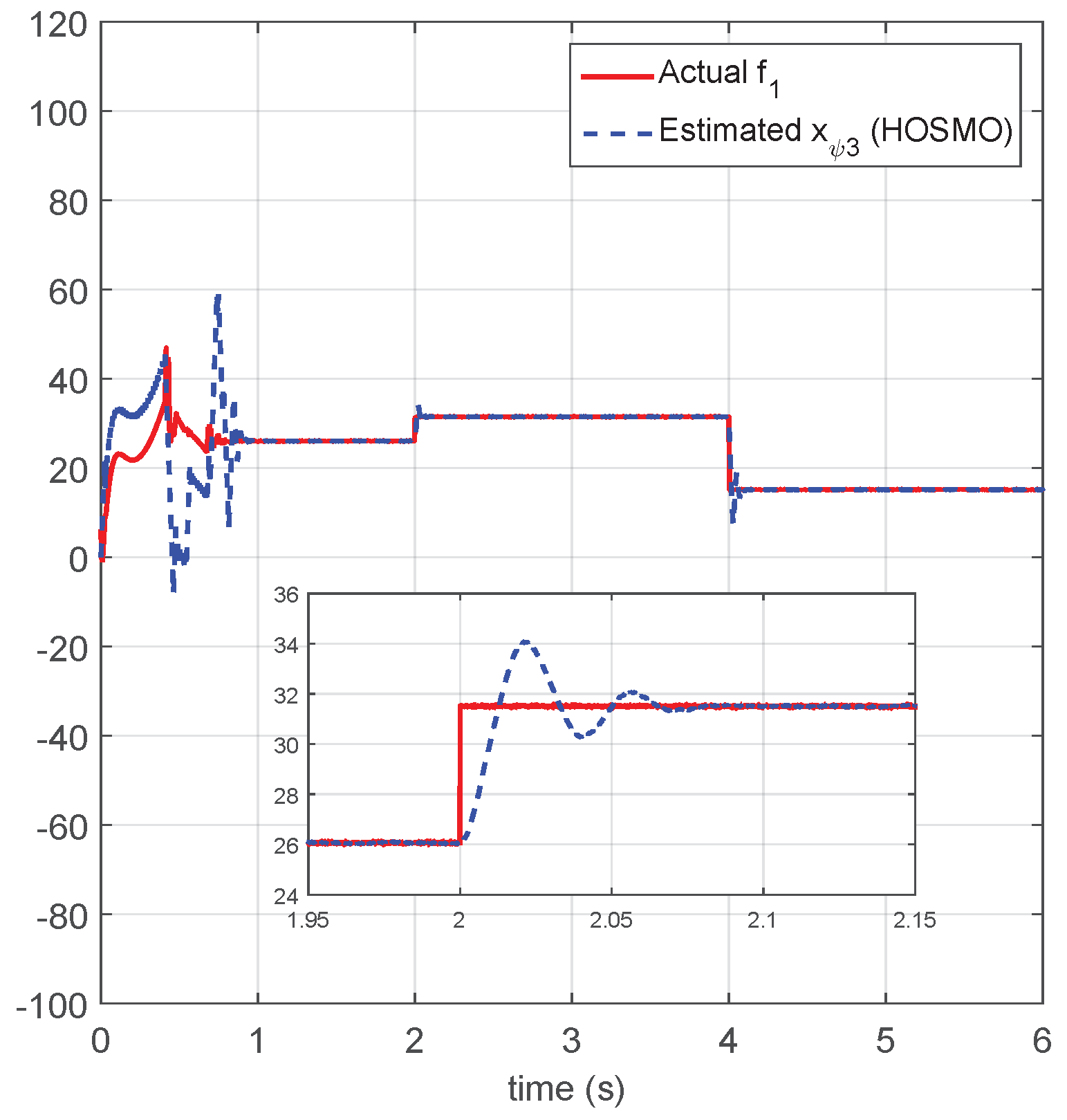
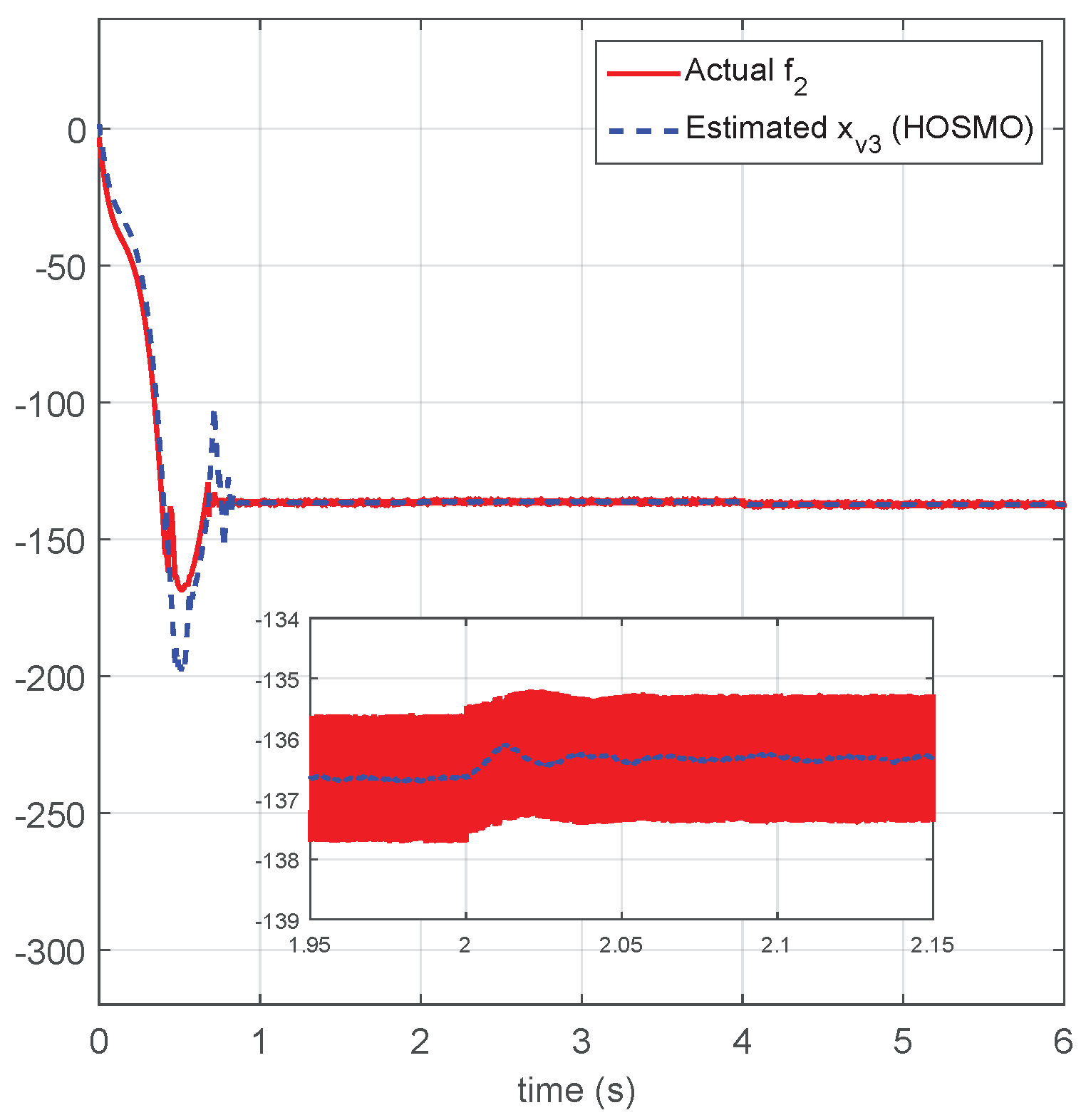
4.1. HOSMO Performance Evaluation
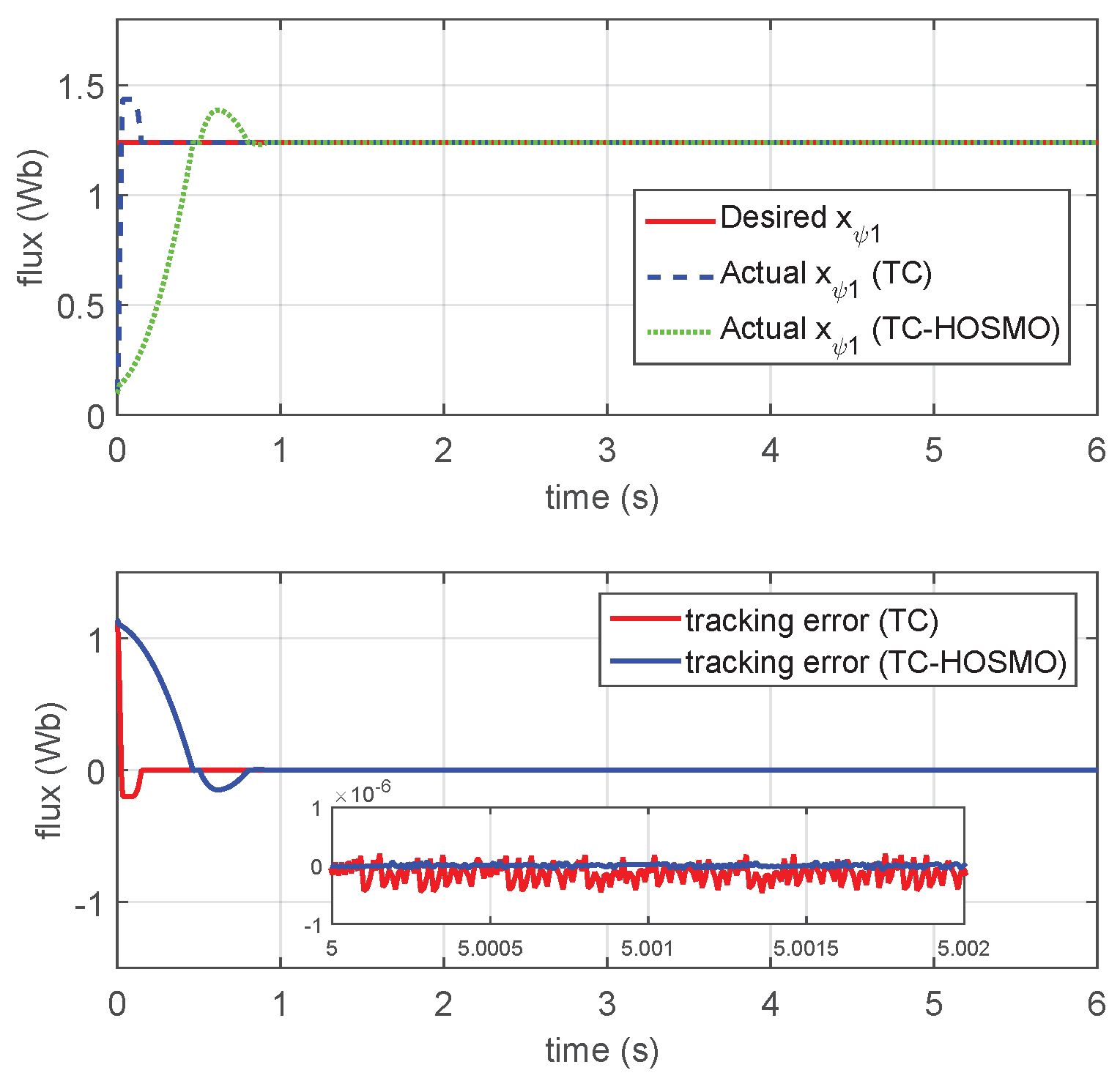
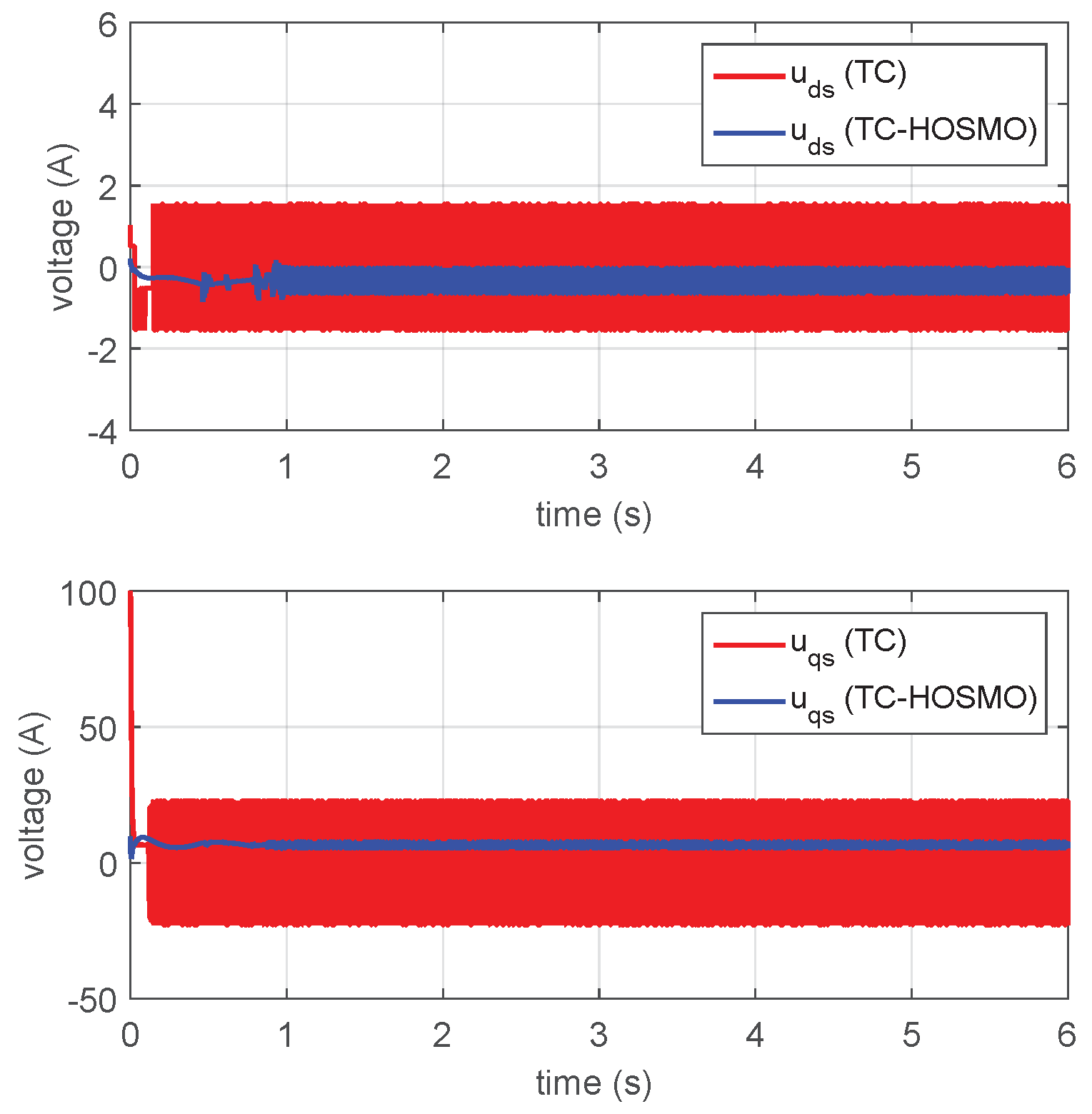
4.2. Comparative Analysis of TC-HOSMO Performance
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Rametti, S.; Pierrejean, L.; Hodder, A.; Paolone, M. Pseudo-Three-Dimensional Analytical Model of Linear Induction Motors for High-Speed Applications. IEEE Trans. Transp. Electrif. 2024, 10, 9109–9120. [Google Scholar] [CrossRef]
- Xiao, X.; Xu, W.; Tang, Y.; Li, W.; Dong, D.; Shangguan, Y.; Huang, S. Improved Loss Minimization Control Based on Time-Harmonic Equivalent Circuit for Linear Induction Motors Adopted to Linear Metro. IEEE Trans. Veh. Technol. 2023, 72, 8601–8612. [Google Scholar] [CrossRef]
- Hamad, S.A.; Ghalib, M.A. Fuzzy MPPT Operation-Based Model Predictive Flux Control for Linear Induction Motors. Int. J. Hydrogen Energy 2024, 50, 1035–1044. [Google Scholar] [CrossRef]
- Zhang, M.; Luo, S.; Liu, Y.; Zhuang, X.; Ma, W. Analysis of the Traction Forces of Two Adjacent Linear Induction Motors. Sci. Rep. 2024, 14, 26760. [Google Scholar] [CrossRef]
- Gomes, D.R.; Chabu, I.E. A Novel Analytical Equivalent Circuit for Single-Sided Linear Induction Motors Considering Secondary Leakage Reactance. Energies 2023, 16, 1261. [Google Scholar] [CrossRef]
- Palka, R.; Woronowicz, K. Linear Induction Motors in Transportation Systems. Energies 2021, 14, 2549. [Google Scholar] [CrossRef]
- Sun, Z.; Xu, L.; Zhao, W.; Du, K. Comparison between Linear Induction Motor and Linear Primary Permanent Magnet Vernier Motor for Railway Transportation. In Proceedings of the 2021 13th International Symposium on Linear Drives for Industry Applications (LDIA), Wuhan, China, 1–3 July 2021; pp. 1–6. [Google Scholar]
- Duncan, J. Linear Induction Motor-Equivalent-Circuit Model. IEE Proc. B (Electr. Power Appl.) 1983, 130, 51–57. [Google Scholar]
- Pucci, M. State Space-Vector Model of Linear Induction Motors. IEEE Trans. Ind. Appl. 2014, 50, 195–207. [Google Scholar] [CrossRef]
- Kang, G.; Nam, K. Field-Oriented Control Scheme for Linear Induction Motor with the End Effect. IEE Proc.-Electr. Power Appl. 2005, 152, 1565–1572. [Google Scholar] [CrossRef]
- Pucci, M. Direct Field Oriented Control of Linear Induction Motors. Elect. Power Syst. Res. 2012, 89, 11–22. [Google Scholar] [CrossRef]
- Karimi, H.; Vaez-Zadeh, S.; Salmasi, F.R. Combined Vector and Direct Thrust Control of Linear Induction Motors with End Effect Compensation. IEEE Trans. Energy Convers. 2016, 31, 196–205. [Google Scholar] [CrossRef]
- Accetta, A.; Cirrincione, M.; D’Ippolito, F.; Pucci, M.; Sferlazza, A. Input–Output Feedback Linearization Control of a Linear Induction Motor Taking into Consideration Its Dynamic End-Effects and Iron Losses. IEEE Trans. Ind. Appl. 2022, 58, 3664–3673. [Google Scholar] [CrossRef]
- Krim, S.; Gdaim, S.; Mtibaa, A.; Faouzi Mimouni, M. FPGA-Based Real-Time Implementation of a Direct Torque Control with Second-Order Sliding Mode Control and Input–Output Feedback Linearisation for an Induction Motor Drive. IET Electr. Power Appl. 2020, 14, 480–491. [Google Scholar] [CrossRef]
- Wu, L.; Liu, J.; Vazquez, S.; Mazumder, S.K. Sliding Mode Control in Power Converters and Drives: A Review. IEEE/CAA J. Autom. Sin. 2021, 9, 392–406. [Google Scholar] [CrossRef]
- Mousavi, Y.; Bevan, G.; Kucukdemiral, I.B.; Fekih, A. Sliding Mode Control of Wind Energy Conversion Systems: Trends and Applications. Renew. Sustain. Energy Rev. 2022, 167, 112734. [Google Scholar] [CrossRef]
- Ye, Z.; Zhang, D.; Cheng, J.; Wu, Z.G. Event-Triggering and Quantized Sliding Mode Control of UMV Systems under DoS Attack. IEEE Trans. Veh. Technol. 2022, 71, 8199–8211. [Google Scholar] [CrossRef]
- Hu, Q.; Han, T.; Xin, M. Three-Dimensional Guidance for Various Target Motions with Terminal Angle Constraints Using Twisting Control. IEEE Trans. Ind. Electron. 2019, 67, 1242–1253. [Google Scholar] [CrossRef]
- Shtessel, Y.B.; Moreno, J.A.; Fridman, L.M. Twisting Sliding Mode Control with Adaptation: Lyapunov Design, Methodology and Application. Automatica 2017, 75, 229–235. [Google Scholar] [CrossRef]
- Utkin, V.; Poznyak, A.; Orlov, Y.; Polyakov, A. Conventional and High Order Sliding Mode Control. J. Frankl. Inst. 2020, 357, 10244–10261. [Google Scholar] [CrossRef]
- Li, B.; Gao, X.; Huang, H.; Yang, H. Improved Adaptive Twisting Sliding Mode Control for Trajectory Tracking of an AUV Subject to Uncertainties. Ocean Eng. 2024, 297, 116204. [Google Scholar] [CrossRef]
- Huang, C.; Li, J.; Mu, S.; Yan, H. Linear Active Disturbance Rejection Control Approach for Load Frequency Control of Two-Area Interconnected Power System. Trans. Inst. Meas. Control 2019, 41, 1562–1570. [Google Scholar] [CrossRef]
- Castillo, A.; García, P.; Sanz, R.; Albertos, P. Enhanced Extended State Observer-Based Control for Systems with Mismatched Uncertainties and Disturbances. ISA Trans. 2018, 73, 1–10. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Wang, H.; Tang, C.; Li, J.; Liang, D.; Qu, Y. Research on Control Strategy of Permanent Magnet Synchronous Motor Based on Fast Terminal Super-Twisting Sliding Mode Observer. IEEE Access 2024, 12, 141905–141915. [Google Scholar] [CrossRef]
- Wang, D.; Liu, X. Sensorless Control of PMSM with Improved Adaptive Super-Twisting Sliding Mode Observer and IST-QSG. IEEE Trans. Transp. Electrif. 2024, 11, 721–731. [Google Scholar] [CrossRef]
- Chalanga, A.; Kamal, S.; Fridman, L.M.; Bandyopadhyay, B.; Moreno, J.A. Implementation of Super-Twisting Control: Super-Twisting and Higher Order Sliding-Mode Observer-Based Approaches. IEEE Trans. Ind. Electron. 2016, 63, 3677–3685. [Google Scholar] [CrossRef]
- Gonzalez-Hernandez, I.; Palacios, F.M.; Cruz, S.S.; Quesada, E.S.E.; Leal, R.L. Real-Time Altitude Control for a Quadrotor Helicopter Using a Super-Twisting Controller Based on High-Order Sliding Mode Observer. Int. J. Adv. Robot. Syst. 2017, 14, 1729881416687113. [Google Scholar] [CrossRef]
- Delavari, H.; Heydarinejad, H.; Baleanu, D. Adaptive Fractional-Order Blood Glucose Regulator Based on High-Order Sliding Mode Observer. IET Syst. Biol. 2018, 13, 43–54. [Google Scholar] [CrossRef]
- Belkhatir, Z.; Laleg-Kirati, T.M. High-Order Sliding Mode Observer for Fractional Commensurate Linear Systems with Unknown Input. Automatica 2017, 82, 209–217. [Google Scholar] [CrossRef]
- Alonge, F.; Cirrincione, M.; D’Ippolito, F.; Pucci, M.; Sferlazza, A. Robust Active Disturbance Rejection Control of Induction Motor Systems Based on Additional Sliding-Mode Component. IEEE Trans. Ind. Electron. 2017, 64, 5608–5621. [Google Scholar] [CrossRef]
- Madonski, R.; Shao, S.; Zhang, H.; Gao, Z.; Yang, J.; Li, S. General Error-Based Active Disturbance Rejection Control for Swift Industrial Implementations. Control Eng. Pract. 2019, 84, 218–229. [Google Scholar] [CrossRef]
- Nigam, S.; Ajala, O.; Domínguez-García, A.D.; Sauer, P.W. Controller Hardware in the Loop Testing of Microgrid Secondary Frequency Control Schemes. Elect. Power Syst. Res. 2021, 190, 106757. [Google Scholar] [CrossRef]

| Symbol | Description |
|---|---|
| Inductor voltages | |
| Inductor currents | |
| Induced part fluxes | |
| Electromagnetic thrust, braking thrust, load thrust | |
| Inductor inductance, induced inductance | |
| Inductor length | |
| Inductor resistance, induced resistance | |
| Induced part time constant | |
| Induced part electrical angular speed | |
| Induced part flux space-vector angle | |
| LIM speed, LIM acceleration | |
| Total leakage factor | |
| Pole-pairs number | |
| h | Pole pitch |
| M | Motor mass |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Zhang, L.; Li, P.; Xu, Y. Active Disturbance Rejection for Linear Induction Motors: A High-Order Sliding-Mode-Observer-Based Twisting Controller. Actuators 2025, 14, 200. https://doi.org/10.3390/act14040200
Liu Y, Zhang L, Li P, Xu Y. Active Disturbance Rejection for Linear Induction Motors: A High-Order Sliding-Mode-Observer-Based Twisting Controller. Actuators. 2025; 14(4):200. https://doi.org/10.3390/act14040200
Chicago/Turabian StyleLiu, Yongwen, Lei Zhang, Pu Li, and Yaoli Xu. 2025. "Active Disturbance Rejection for Linear Induction Motors: A High-Order Sliding-Mode-Observer-Based Twisting Controller" Actuators 14, no. 4: 200. https://doi.org/10.3390/act14040200
APA StyleLiu, Y., Zhang, L., Li, P., & Xu, Y. (2025). Active Disturbance Rejection for Linear Induction Motors: A High-Order Sliding-Mode-Observer-Based Twisting Controller. Actuators, 14(4), 200. https://doi.org/10.3390/act14040200