
Diving in Nose First: The Influence of Unfamiliar Search Scale and Environmental Context on the Search Performance of Volunteer Conservation Detection Dog–Handler Teams

 , , ,
, , ,
Abstract
:Simple Summary
Abstract
1. Introduction
2. Experiment 1: Simple Field Conditions (SFC)
2.1. Materials and Methods
2.1.1. Participants
2.1.2. Materials
2.1.3. Procedure
2.1.4. Familiarization
2.1.5. Training Methodology
2.1.6. Search Assessments
2.1.7. Data Analysis
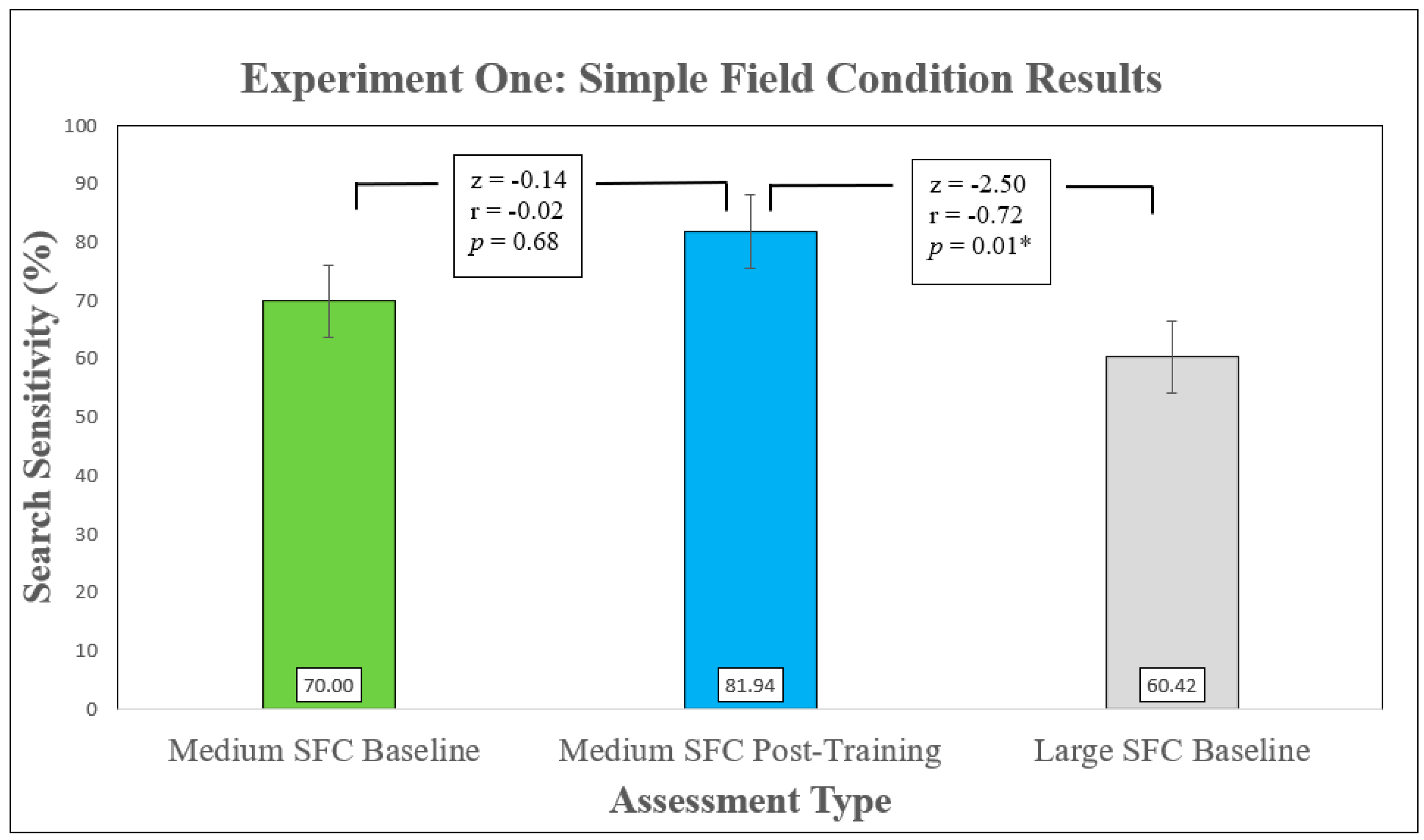
2.2. Results
2.3. Summary
3. Experiment 2: Complex Field Conditions (CFC)
3.1. Materials and Methods
3.1.1. Participants
3.1.2. Materials
3.1.3. Procedure
Familiarization
Training Methodology
Search Assessments
Data Analysis
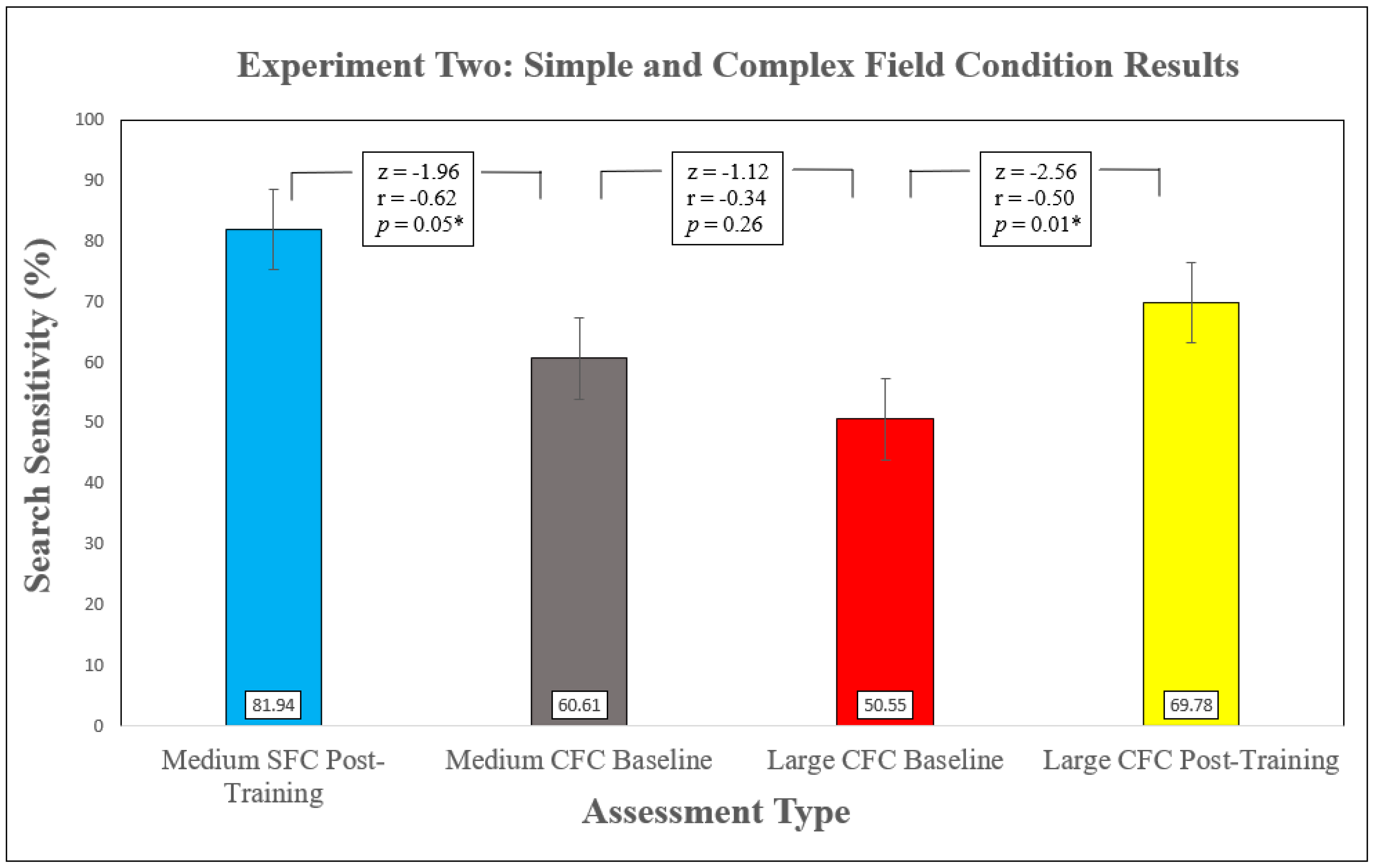
3.2. Results
3.3. Summary
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Beebe, S.C.; Howell, T.J.; Bennett, P.C. Using Scent Detection Dogs in Conservation Settings: A Review of Scientific Literature Regarding Their Selection. Front. Vet. Sci. 2016, 3, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Rolland, M.; Hamilton, P.; Kraus, S.; Davenport, B.; Gillet, R.; Wasser, S. Faecal Sampling Using Detection Dogs to Study Reproduction and Health in North Atlantic Right Whales (Eubalaena glacialis). J. Cetacean Res. Manag. 2006, 8, 121–125. [Google Scholar]
- Wasser, S.K.; Hayward, L.; Hartman, J.; Booth, R.; Broms, K.; Berg, J.; Seely, E.; Lewis, L.; Smith, H. Using Detection Dogs to Conduct Simultaneous Surveys of Northern Spotted (Strix occidentalis caurina) and Barred Owls (Strix varia). PLoS ONE 2012, 7, e42892. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Arnett, E.B. A Preliminary Evaluation on the Use of Dogs to Recover Bat Fatalities at Wind Energy Facilities. Wildl. Soc. Bull. 2006, 34, 1440–1445. [Google Scholar] [CrossRef]
- Dematteo, K.E.; Rinas, M.A.; Sede, M.M.; Davenport, B.; Argüelles, C.F.; Lovett, K.; Parker, P.G. Detection Dogs: An Effective Technique for Bush Dog Surveys. J. Wildl. Manag. 2009, 73, 1436–1440. [Google Scholar] [CrossRef]
- Goodwin, K.M.; Engel, R.E.; Weaver, D.K. Trained Dogs Outperform Human Surveyors in the Detection of Rare Spotted Knapweed (Centaurea stoebe). Invasive Plant Sci. Manag. 2010, 3, 113–121. [Google Scholar] [CrossRef]
- Harrison, R. A Comparison of Survey Methods for Detecting Bobcats. Wildl. Soc. Bull. 2006, 34, 548–552. [Google Scholar] [CrossRef]
- Jenkins, D.; Watson, A.; Miller, G. Population Studies on Red Grouse, Lagopus lagopus scoticus (Lath.) in North-East Scotland. J. Anim. Ecol. 1963, 32, 317–376. [Google Scholar] [CrossRef]
- Pimm, S.; Jenkins, C.; Abell, R.; Brooks, T.M.; Gittleman, J.; Joppa, L.; Raven, P.; Roberts, C.M.; Sexton, J. The Biodiversity of Species and Their Rates of Extinction, Distribution, and Protection. Science 2014, 344, 987–999. [Google Scholar] [CrossRef]
- Browne, C.M.; Stafford, K.J.; Fordham, R.A. The Detection and Identification of Tuatara and Gecko Scents by Dogs. J. Vet. Behav. 2015, 10, 496–503. [Google Scholar] [CrossRef]
- Byosiere, S.-E.; Feng, L.C.; Rutter, N.J. Factors That May Affect the Success of Scent Detection Dogs: Exploring Non-Conventional Models of Preparation and Deployment. Comp. Cogn. Behav. Rev. 2019, 14, 81–86. [Google Scholar] [CrossRef] [Green Version]
- Rutter, N.J.; Howell, T.J.; Stukas, A.A.; Pascoe, J.H.; Bennett, P.C. Can Volunteers Train Their Pet Dogs to Detect a Novel Odour in a Controlled Environment in under 12 Weeks? J. Vet. Behav. 2021, in press. [Google Scholar]
- Rooney, N.; Gaines, S.; Hiby, E. A Practitioner’s Guide to Working Dog Welfare. J. Vet. Behav. 2009, 4, 127–134. [Google Scholar] [CrossRef]
- Scheifele, P.; Martin, D.; Clark, J.G.; Kemper, D.; Wells, J. Effect of Kennel Noise on Hearing in Dogs. Am. J. Vet. Res. 2012, 73, 482–489. [Google Scholar] [CrossRef] [PubMed]
- Troisi, C.A.; Mills, D.S.; Wilkinson, A.; Zulch, H.E. Behavioral and Cognitive Factors That Affect the Success of Scent Detection Dogs. Comp. Cogn. Behav. Rev. 2019, 14, 51–76. [Google Scholar] [CrossRef]
- Leigh, K.A.; Dominick, M.; McPherson, J. An Assessment of the Effects of Habitat Structure on the Scat Finding Performance of a Wildlife Detection Dog. Methods Ecol. Evol. 2015, 6, 745–752. [Google Scholar] [CrossRef]
- Gazit, I.; Goldblatt, A.; Terkel, J. The Role of Context Specificity in Learning: The Effects of Training Context on Explosives Detection in Dogs. Anim. Cogn. 2005, 8, 143–150. [Google Scholar] [CrossRef]
- Reed, S.E.; Bidlack, A.L.; Hurt, A.; Getz, W.M. Detection Distance and Environmental Factors in Conservation Detection Dog Surveys. J. Wildl. Manag. 2011, 75, 243–251. [Google Scholar] [CrossRef]
- Lazarowski, L.; Dorman, D.C. Explosives Detection by Military Working Dogs: Olfactory Generalization from Components to Mixtures. Appl. Anim. Behav. Sci. 2014, 151, 84–93. [Google Scholar] [CrossRef]
- Rutter, N.J.; Mynott, J.H.; Howell, T.J.; Stukas, A.A.; Pascoe, J.H.; Bennett, P.C.; Murphy, N.P. Buzzing with Possibilities: Training and Olfactory Generalisation in Conservation Detection Dogs for an Endangered Stonefly Species. Aquat. Conserv. 2021, 1–6. [Google Scholar] [CrossRef]
- Wright, H.F.; Wilkinson, A.; Croxton, R.S.; Graham, D.K.; Harding, R.C.; Hodkinson, H.L.; Keep, B.; Cracknell, N.R.; Zulch, H.E. Animals Can Assign Novel Odours to a Known Category. Sci. Rep. 2017, 7, 1–16. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Moser, A.Y.; Bizo, L.; Brown, W.Y. Olfactory Generalization in Detector Dogs. Animals 2019, 9, 702. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Snovak, A.E. Guide to Search and Rescue Dogs; Baron’s Educational Series; Hauppauge: New York, NY, USA, 2004; pp. 1–185. [Google Scholar]
- Syrotuck, W.G. Scent and the Scenting Dog; Barkleigh Productions: Mechanicsburg, PA, USA, 1972; pp. 1–112. [Google Scholar]
- Clare, J.D.J.; Anderson, E.M.; Mfarland, D.M.; Sloss, B.L. Comparing the Costs and Detectability of Bobcat Using Scat-Detecting Dog and Remote Camera Surveys in Central Wisconsin. Wildl. Soc. Bull. 2015, 39, 210–217. [Google Scholar] [CrossRef]
- Porritt, F.; Shapiro, M.; Waggoner, P.; Mitchell, E.; Thomson, T.; Nicklin, S.; Kacelnik, A. Performance Decline by Search Dogs in Repetitive Tasks, and Mitigation Strategies. Appl. Anim. Behav. Sci. 2015, 166, 112–122. [Google Scholar] [CrossRef] [Green Version]
- Glen, A.S.; Anderson, D.; Veltman, C.J.; Garvey, P.M.; Nichols, M. Wildlife Detector Dogs and Camera Traps: A Comparison of Techniques for Detecting Feral Cats. N. Z. J. Zool. 2016, 43, 127–137. [Google Scholar] [CrossRef]
- Glen, A.S.; Veltman, C.J. Search Strategies for Conservation Detection Dogs. Wildl. Biol. 2018, 2018, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Braun, B. Wildlife Detector Dogs—A Guideline on the Training of Dogs to Detect Wildlife in Trade; WWF Germany: Berlin, Germany, 2013; pp. 1–16. [Google Scholar]
- Hurt, A.; Smith, D.A. Conservation Dogs. In Canine Ergonomics: The Science of Working Dogs; Helton, W.S., Ed.; Taylor & Francis Group: Boca Raton, FL, USA, 2009; pp. 175–194. [Google Scholar]
- Johnen, D.; Heuwieser, W.; Fischer-Tenhagen, C. Canine Scent Detection—Fact or Fiction? Appl. Anim. Behav. Sci. 2013, 148, 201–208. [Google Scholar] [CrossRef]
- Cablk, M.; Sagebiel, J.; Heaton, J.; Valentin, C. Olfaction-Based Detection Distance: A Quantitative Analysis of How Far Away Dogs Recognize Tortoise Odor and Follow It to Source. Sensors 2008, 8, 2208–2222. [Google Scholar] [CrossRef]
- Bennett, E.M.; Hauser, C.E.; Moore, J.L. Evaluating Conservation Dogs in the Search for Rare Species. Conserv. Biol. 2019, 314–325. [Google Scholar] [CrossRef]
- Pallant, J. Spss Survival Manual, 5th ed.; Allen & Unwin: St Leonards, NSW, Australia, 2013; pp. 1–378. [Google Scholar]
- Cablk, M.E.; Heaton, J.S. Accuracy and Reliability of Dogs in Surveying for Desert Tortoise (Gopherus agassizii). Ecol. Appl. 2006, 16, 1926–1935. [Google Scholar] [CrossRef]
- Nussear, K.E.; Esque, T.C.; Heaton, J.S.; Cablk, M.E.; Drake, K.K.; Valentin, C.; Yee, J.L.; Medica, P.A. Are Wildlife Detector Dogs or People Better at Finding Desert Tortoises (Gopherus agassizii)? Herpetol. Conserv. Biol. 2008, 3, 103–115. [Google Scholar]
- Long, R.A.; Donovan, T.M.; Mackay, P.; Zielinski, W.J.; Buzas, J.S. Effectiveness of Scat Detection Dogs for Detecting Forest Carnivores. J. Wildl. Manag. 2007, 71, 2007–2017. [Google Scholar] [CrossRef]
- Lit, L.; Schweitzer, J.; Oberbauer, A. Handler Beliefs Affect Scent Detection Dog Outcomes. Anim. Cognit. 2011, 14, 387–394. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hauser, C.E.; McCarthy, M.A. Streamlining ‘Search and Destroy’: Cost-Effective Surveillance for Invasive Species Management. Ecol. Lett. 2009, 12, 683–692. [Google Scholar] [CrossRef] [PubMed]
- Stukas, A.; Snyder, M.; Clary, E.G. Volunteerism and Community Involvement: Antecedents, Experiences, and Consequences for the Person and the Situation. In The Oxford Handbook of Prosocial Behavior; Schroeder, D.A., Graziano, W., Eds.; Oxford University Press: New York, NY, USA, 2015; pp. 459–493. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dog–Handler Team Number# | Owner-Reported Dog Breed | Dog Sex | Dog Age (years) | Handler Gender | Handler Age (years) | % of the 19 Training Sessions Attended (No of Sessions) |
|---|---|---|---|---|---|---|
| #1 | Rhodesian Ridgeback | Intact male | 5.8 | M | 39 | 74% (14) |
| #2 | Australian Kelpie | Intact male | 5.7 | F | 58 | 79% (15) |
| #3 | Miniature Poodle | Neutered female | 2.5 | F | 60 | 90% (17) |
| #4 | Samoyed | Neutered female | 2.2 | F | 34 | 74% (14) |
| #5 | Rough Collie | Neutered male | 6.6 | F | 63 | 95% (18) |
| #6 | Cocker Spaniel × Toy Poodle | Neutered male | 2.1 | F | 29 | 58% (11) |
| #7 | Weimaraner | Intact male | 4.9 | M | 54 | 74% (14) |
| #8 | Labrador × Kelpie | Neutered male | 3.3 | F | 31 | 63% (12) |
| #9 | Cavoodle | Neutered male | 1.8 | F | 50 | 68% (13) |
| #10 | Australian Cattle Dog | Neutered female | 7.3 | F | 65 | 50% (6/12) * |
| #11 | Border Collie | Neutered female | 4.7 | M | 68 | 58% (11) |
| #12 | Border Collie | Neutered female | 3.8 | F | 25 | 74% (14) |
| #13 | Border Collie | Neutered female | 8.6 | F | 67 | 68% (13) |
| #14 | Labrador | Neutered male | 2.7 | F | 37 | 37% (7) |
| Assessment Number and Search Size | N Dog–Handler Teams | N Trials per Team | N Targets per Search | Targets Available for Analysis * | Total Correct Alerts | Grand Mean Sensitivity (%) ** | Total False Alerts | Search Precision | Search Effort (Time) (Min:Sec) | |||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Mean | SD | Min | Max | |||||||||
| PREVIOUS ASSESSMENT: Controlled indoor conditions Post-Training. Weather data not collected. | ||||||||||||
| Standard room search | 17 | 1 | 1 | 17 | 16 | 94.12 | 1 | 0.94 | 0:21 | 0:18 | 0:06 | 1:25 |
| ASSESSMENT 1: Simple Field Conditions Baseline. Weather data not collected. | ||||||||||||
| Small | 10 | 1 | 1 | 10 | 6 | 60.00 | 2 | 0.75 | 1:18 | 1:41 | 1:09 | 2:20 |
| Medium | 10 | 1 | 1 | 10 | 7 | 70.00 | 0 | 1.00 | 2:38 | 2:02 | 0:20 | 5:00 |
| ASSESSMENT 2: Simple Field Conditions Post-2 weeks of training in Medium plots. Temperature: 6 °C–12 °C (M = 8 °C). Humidity: 55–97% (Mean = 65%). | ||||||||||||
| Medium | 12 | 3 | 2 | 64 | 54 | 81.94 | 11 | 0.83 | 5:17 | 1:58 | 1:30 | 9:53 |
| Medium (Target absent | 12 | 1 | 0 | 0 | - | - | 4 | - | 5:28 | 2:20 | 1:35 | 10:00 |
| Large | 12 | 1 | 4 | 48 | 29 | 60.42 | 2 | 0.94 | 16:30 | 2:28 | 13:25 | 20:00 |
| ASSESSMENT 3: Complex Field Conditions Baseline. Temperature: 3 °C–13 °C (M = 10 °C). Humidity: 47–97% (Mean = 64%). | ||||||||||||
| Medium | 12 | 1 | 3 | 36 | 22 | 60.61 | 0 | 1.00 | 7:32 | 2:26 | 4:00 | 10:00 |
| Medium (Target absent) | 11 | 1 | 0 | 0 | 1 | - | 6:34 | 1:46 | 3:08 | 8:52 | ||
| Large | 13 | 1 | 7 | 91 | 46 | 50.55 | 3+ | 0.94 | 21:14 | 3:52 | 15:02 | 25:00 |
| ASSESSMENT 4: Complex Field Conditions Post-seven weeks of Training in Medium and Large plots. Search 1: Temperature: 16 °C–25 °C (M = 21 °C). Humidity: 28–45% (Mean = 36%). Wind conditions: Occasional gust 0–6 km/h. Search 2: Temperature: 20 °C–25 °C (M= 23 °C). Humidity: 29–48% (Mean= 36%). Wind conditions: Occasional gust 0–13 km/h. | ||||||||||||
| Search 1: Large | 13 | 1 | 7 | 91 | 61 | 67.03 | 5+ | 0.92 | 22:55 | 2:41 | 17:13 | 25:00 |
| Search 2: Large | 13 | 1 | 7 | 91 | 66 | 72.53 | 7++ | 0.90 | 23:38 | 1:52 | 19:73 | 25:00 |
| Combined total | 13 | 2 | 7 | 182 | 127 | 69.78 | 12 | 0.91 | 23:17 | 2:18 | 17:16 | 25:00 |
| Search 1 | Search 2 | Searches 1 and 2 Combined | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Dog–Handler Team No. | Search Sensitivity % (Total = 7) | Total False Alerts | Search Effort (mm:ss) | Search Sensitivity % (Total = 7) | Total False Alerts | Search Effort (mm:ss) | Total Search Sensitivity % | Total Search Precision | Mean Search Effort (mm:ss) |
| #1 | 57.14 (4) | 1 | 25:00 | 85.71 (6) | 1 | 24:26 | 71.43 | 0.83 | 24:43 |
| #2 | 57.14 (4) | 0 | 21:32 | 85.71 (6) | 0 | 19:43 | 71.43 | 1.00 | 20:37 |
| #3 | 28.57 (2) | 0 | 23:06 | 28.57 (2) | 1 | 25:00 | 28.57 | 0.80 | 24:03 |
| #4 | 57.14 (4) | 0 | 24:22 | 100.00 (7) | 0 | 25:00 | 78.57 | 1.00 | 24:36 |
| #5 | 71.43 (5) | 1 | 25:00 | 85.71 (6) | 1 | 24:44 | 78.57 | 0.85 | 24:52 |
| #6 | 42.86 (3) | 1 | 20:29 | 85.71 (6) | 0 | 21:54 | 64.29 | 0.90 | 21:11 |
| #7 | 42.86 (3) | 0 | 23:51 | 71.43 (5) | 1 | 24:19 | 57.14 | 0.89 | 24:05 |
| #8 | 85.71 (6) | 1 | 25:00 | 71.43 (5) | 1 | 25:00 | 78.57 | 0.85 | 25:00 |
| #9 | 85.71 (6) | 1 | 25:00 | 42.86 (3) | - | - | 64.29 | 0.86 | - |
| #11 | 100.00 (7) | 0 | 25:00 | 57.14 (4) | - | - | 78.57 | 1.00 | - |
| #12 | 85.71 (6) | 0 | 17:13 | 85.71 (6) | 0 | 21:36 | 85.71 | 1.00 | 19:24 |
| #13 | 85.71 (6) | 0 | 18:24 | 57.14 (4) | 0 | 23:13 | 71.43 | 1.00 | 20:38 |
| #14 | 71.43 (5) | 0 | 24:04 | 85.71 (6) | 2 | 25:00 | 78.57 | 0.85 | 24:32 |
| Mean | 67.03 (61) | 0.34 | 22.55 | 72.53 (66) | 0.54 | 23.38 | 69.78 | 0.91 | 23:17 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rutter, N.J.; Howell, T.J.; Stukas, A.A.; Pascoe, J.H.; Bennett, P.C. Diving in Nose First: The Influence of Unfamiliar Search Scale and Environmental Context on the Search Performance of Volunteer Conservation Detection Dog–Handler Teams. Animals 2021, 11, 1177. https://doi.org/10.3390/ani11041177
Rutter NJ, Howell TJ, Stukas AA, Pascoe JH, Bennett PC. Diving in Nose First: The Influence of Unfamiliar Search Scale and Environmental Context on the Search Performance of Volunteer Conservation Detection Dog–Handler Teams. Animals. 2021; 11(4):1177. https://doi.org/10.3390/ani11041177
Chicago/Turabian StyleRutter, Nicholas J., Tiffani J. Howell, Arthur A. Stukas, Jack H. Pascoe, and Pauleen C. Bennett. 2021. "Diving in Nose First: The Influence of Unfamiliar Search Scale and Environmental Context on the Search Performance of Volunteer Conservation Detection Dog–Handler Teams" Animals 11, no. 4: 1177. https://doi.org/10.3390/ani11041177
APA StyleRutter, N. J., Howell, T. J., Stukas, A. A., Pascoe, J. H., & Bennett, P. C. (2021). Diving in Nose First: The Influence of Unfamiliar Search Scale and Environmental Context on the Search Performance of Volunteer Conservation Detection Dog–Handler Teams. Animals, 11(4), 1177. https://doi.org/10.3390/ani11041177