
Calculating Volume of Pig Point Cloud Based on Improved Poisson Reconstruction

 ,
,
Abstract
:Simple Summary
Abstract
1. Introduction
2. Materials and Methods
2.1. Experimental Data Acquisition and Algorithmic Process
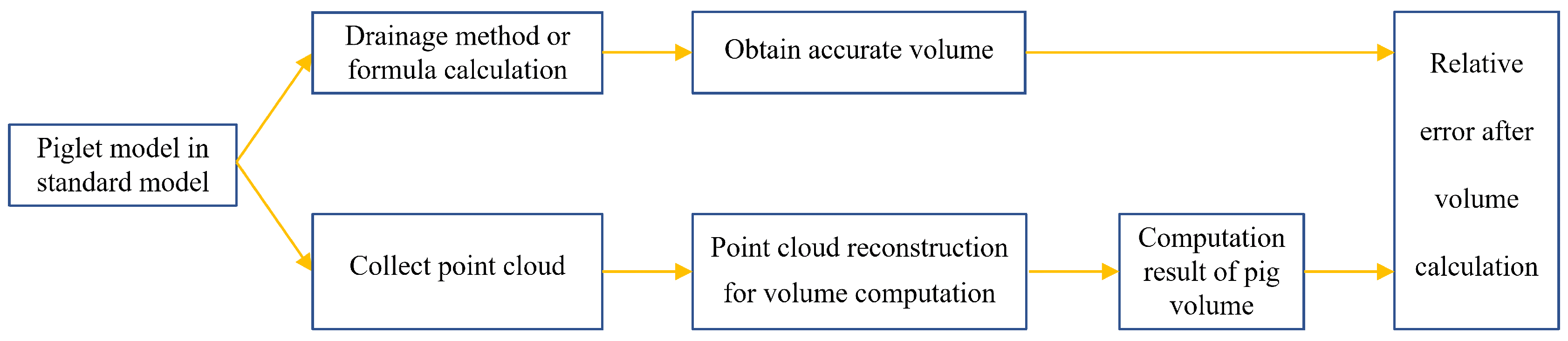
2.2. Validation of Pig Body Volume Calculation Method
2.3. Pig Point Cloud Smoothing
2.4. Estimating Normal Vector via Principal Component Analysis
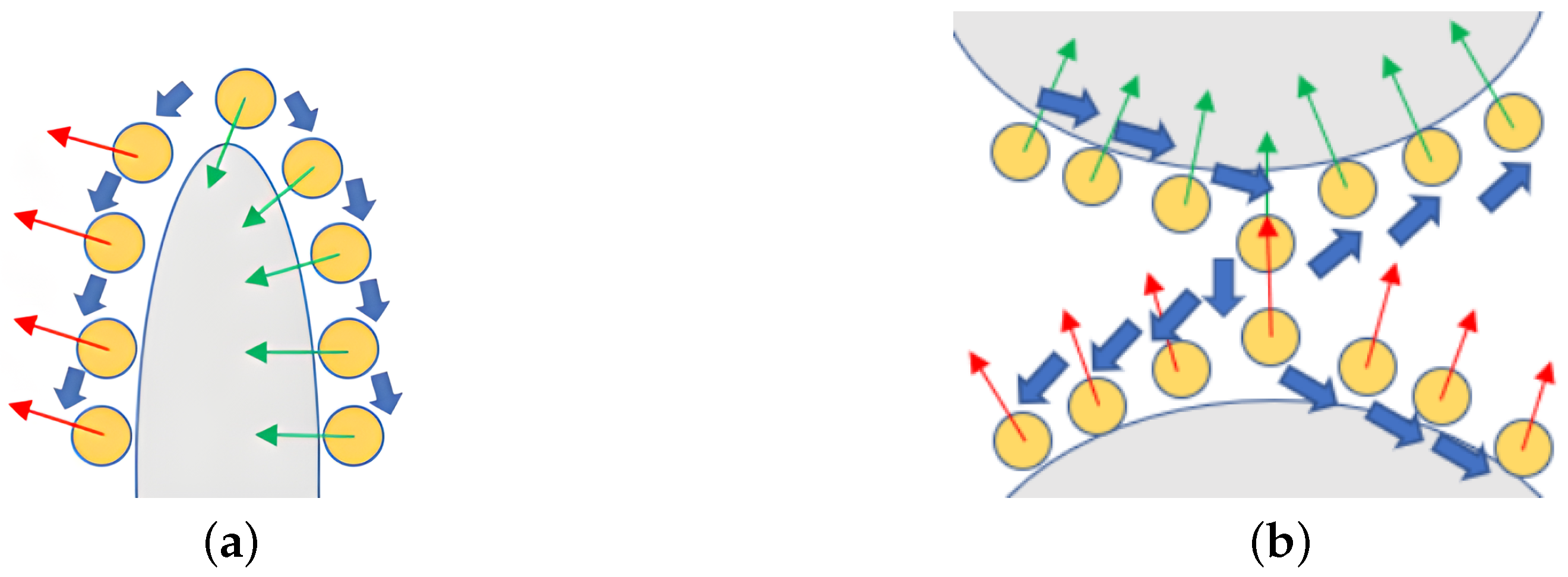
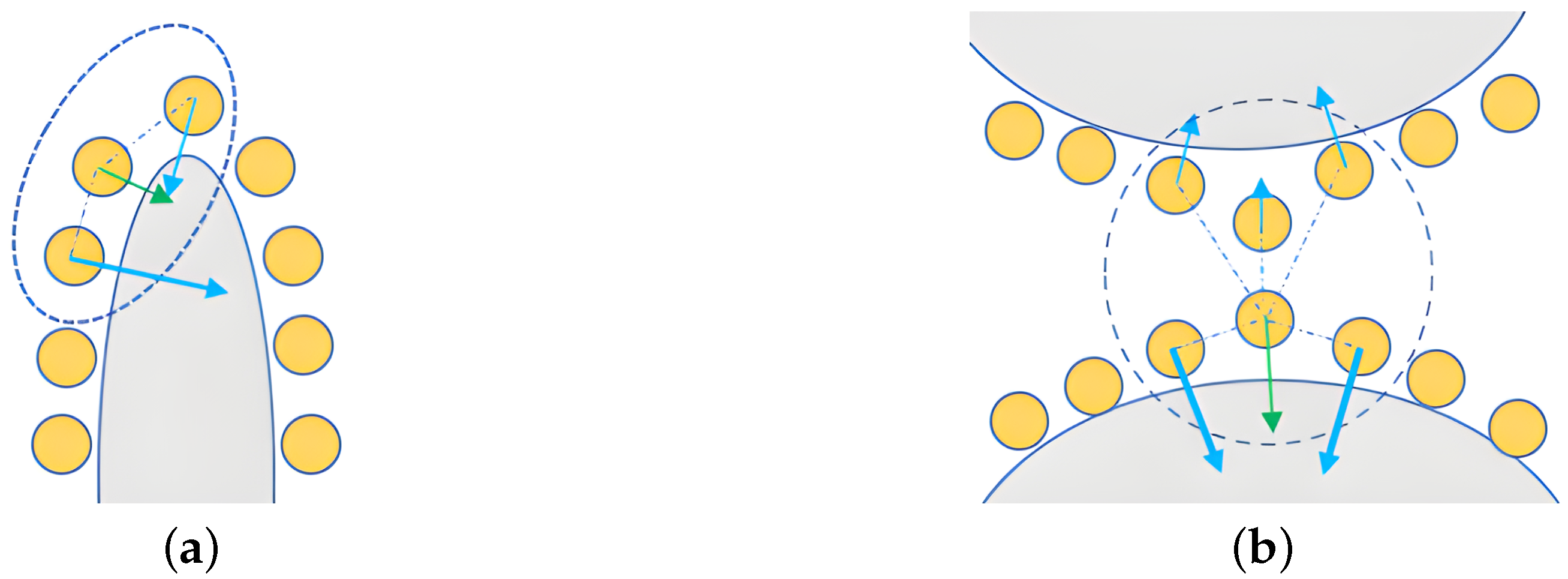
2.5. Redirected Point Cloud Normal Vector
2.6. Reconstructing Mesh Model
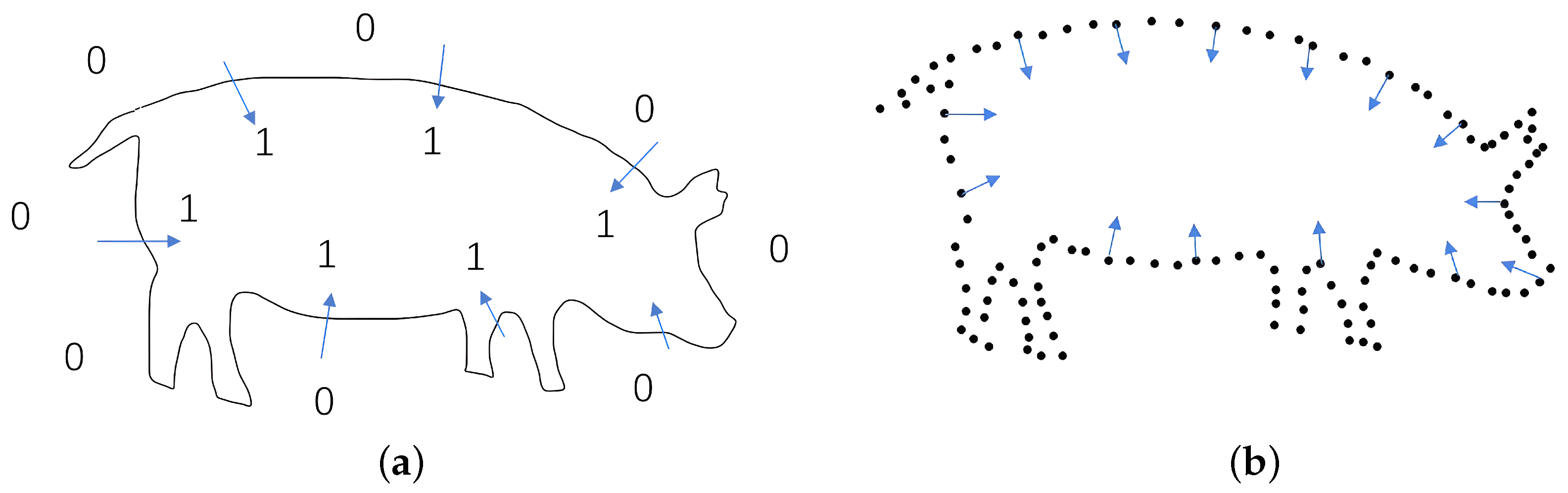
2.6.1. Surface Reconstruction Based on Poisson Equation
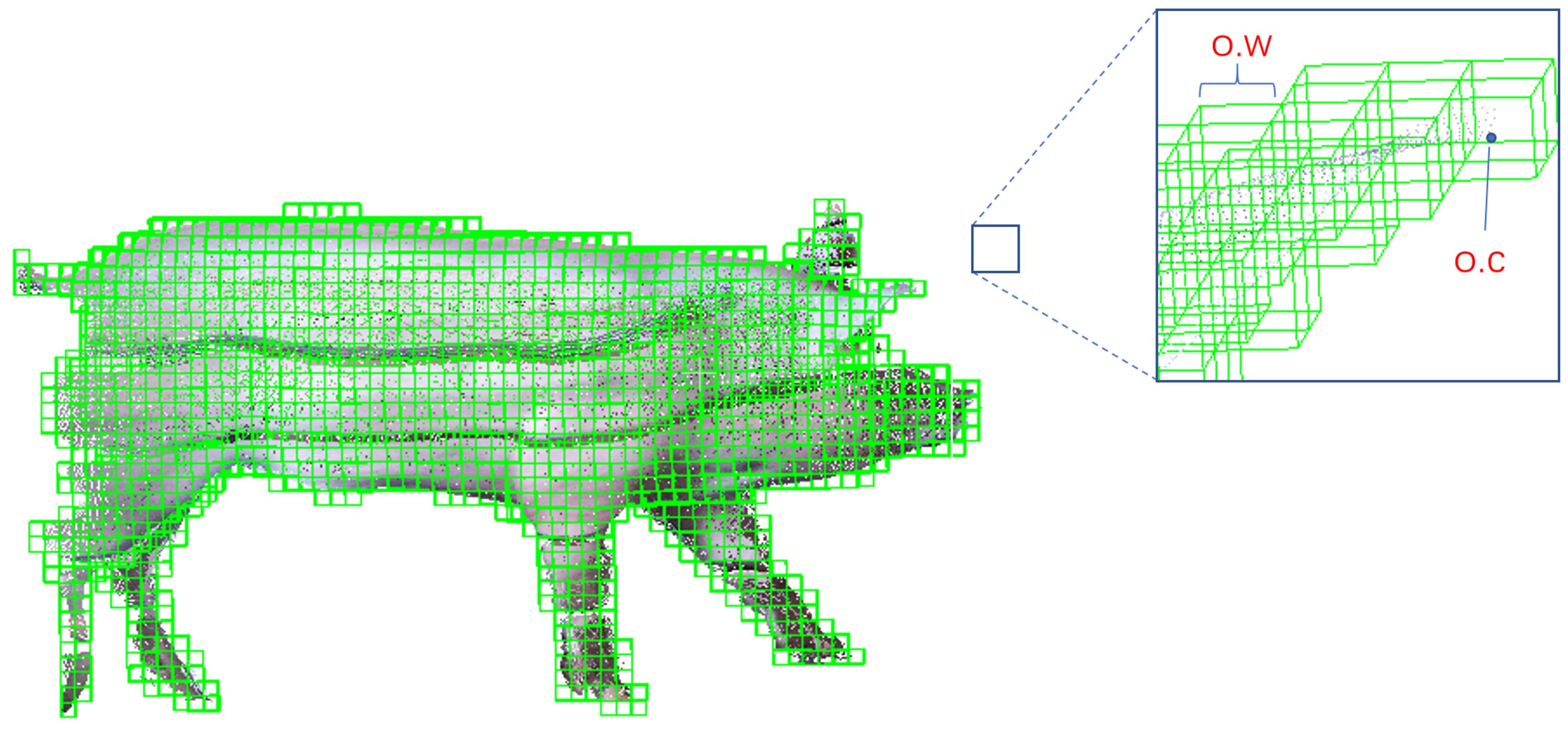
2.6.2. Octree Space Discretization
2.6.3. Isosurface Extraction
2.6.4. Improved Poisson Equation Surface Reconstruction
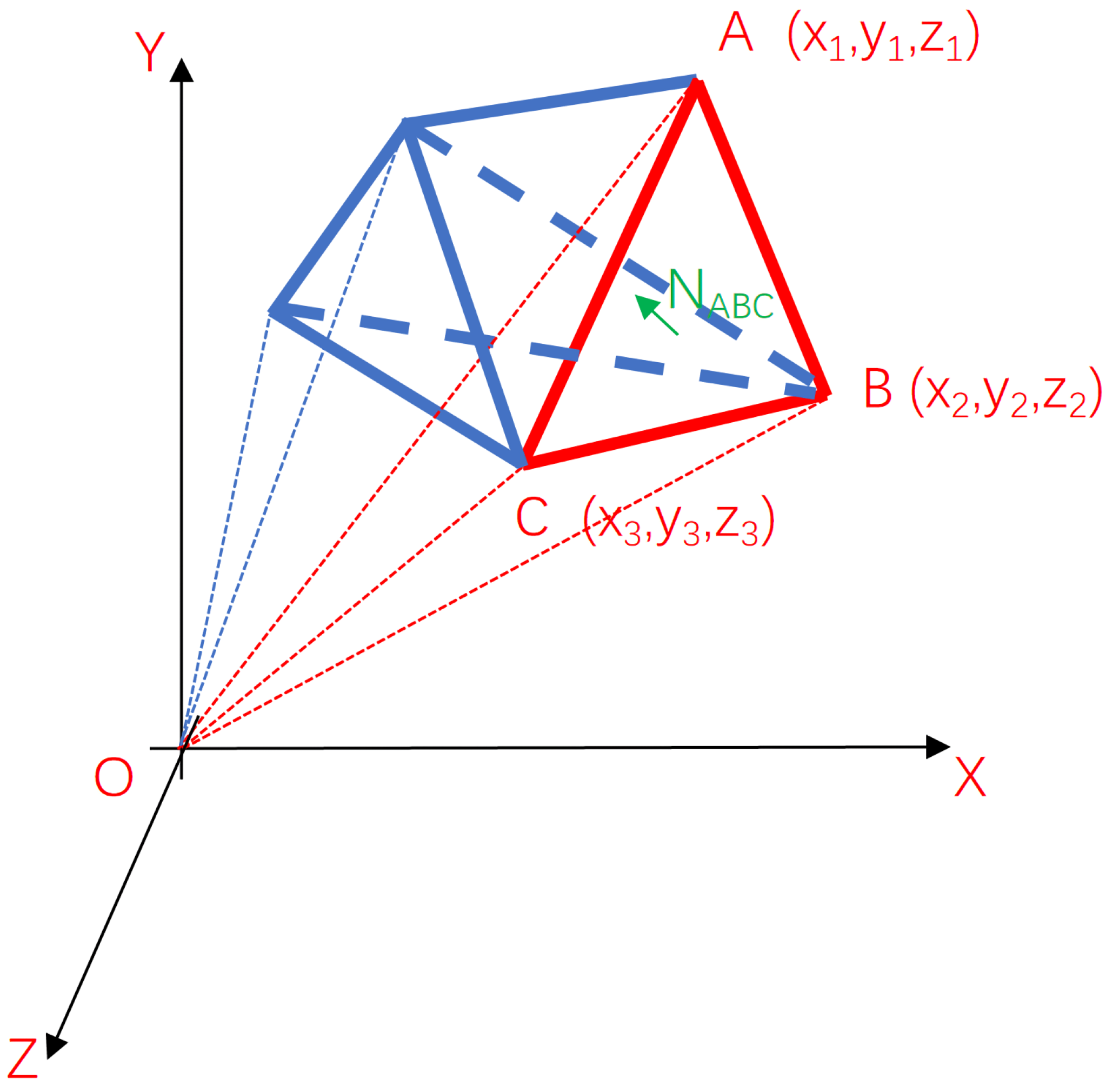
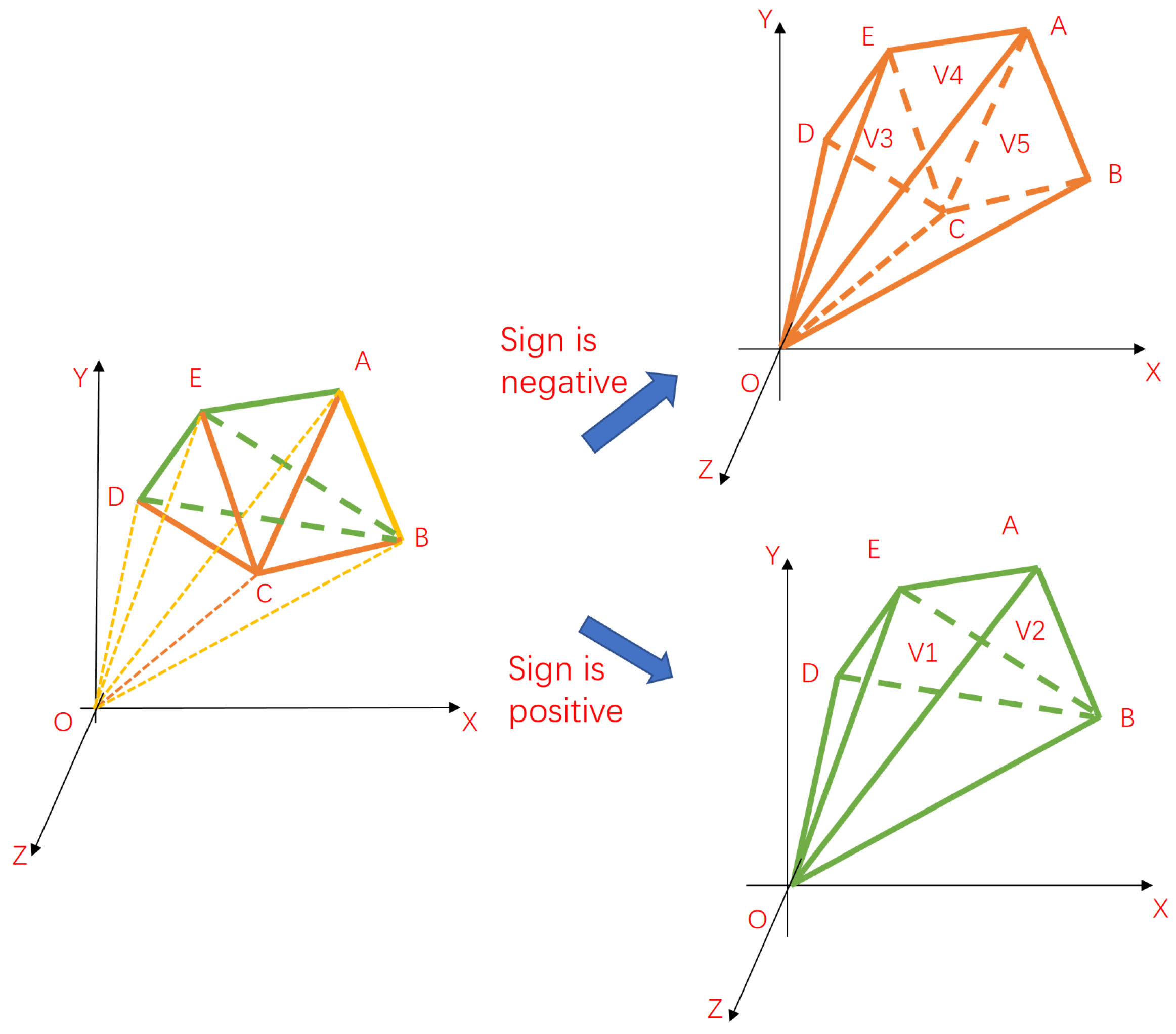
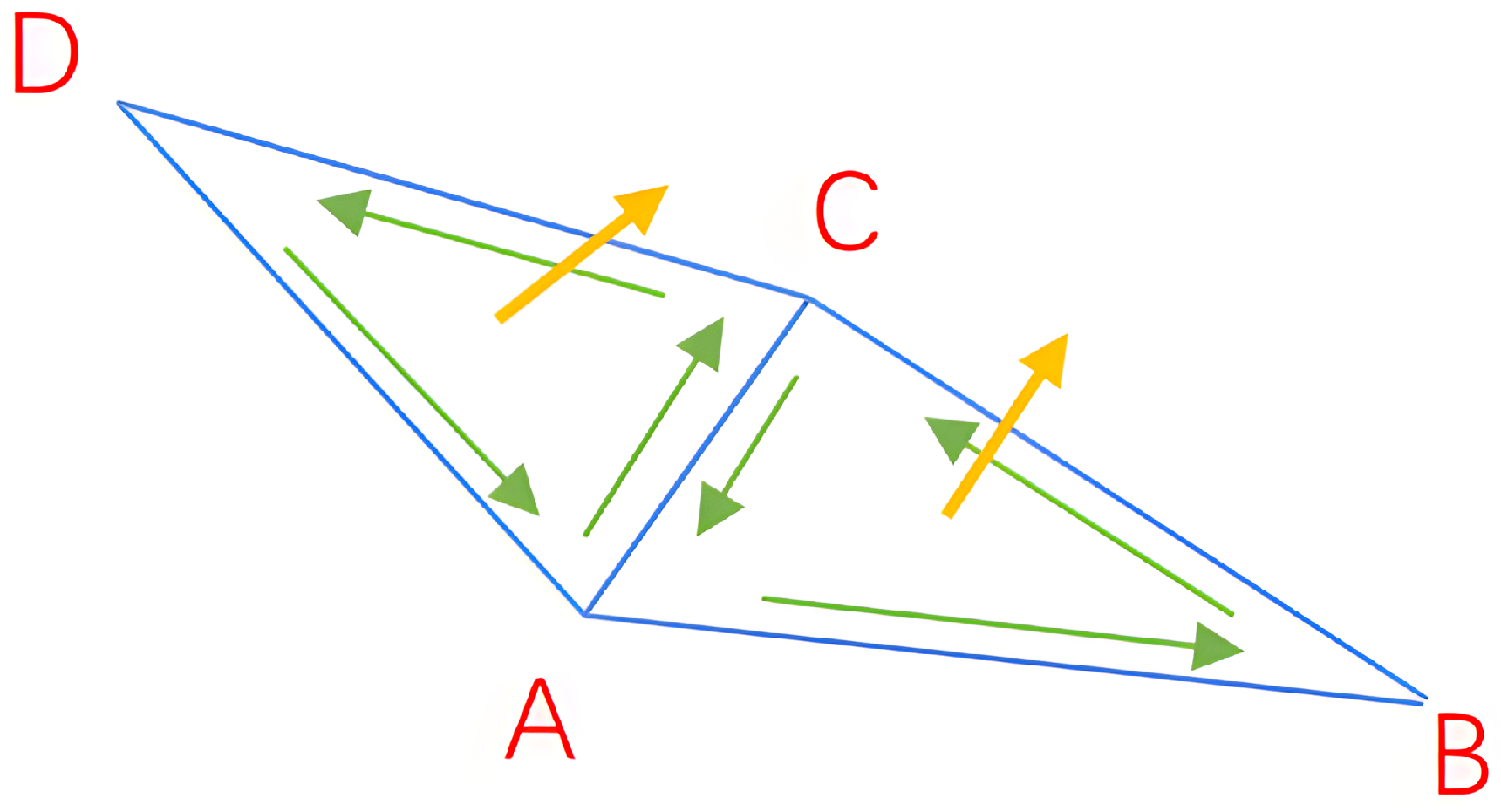
2.7. Volume Calculation of Three-Dimensional Mesh Models
3. Experimental Results and Analysis
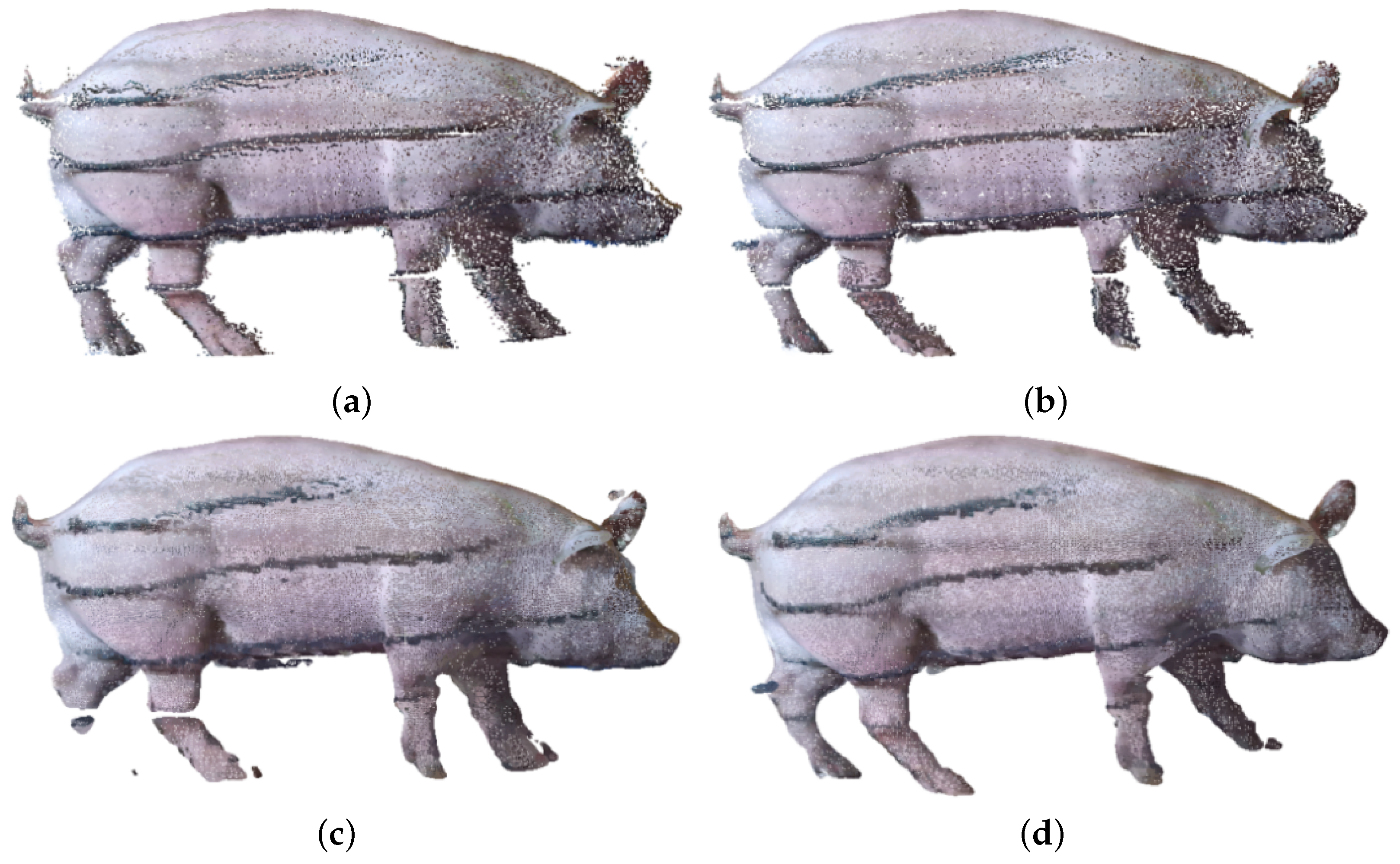
3.1. Analysis of Point Cloud Reconstruction Results
3.2. Analysis of Volume Calculation Results
4. Discussion
- (1)
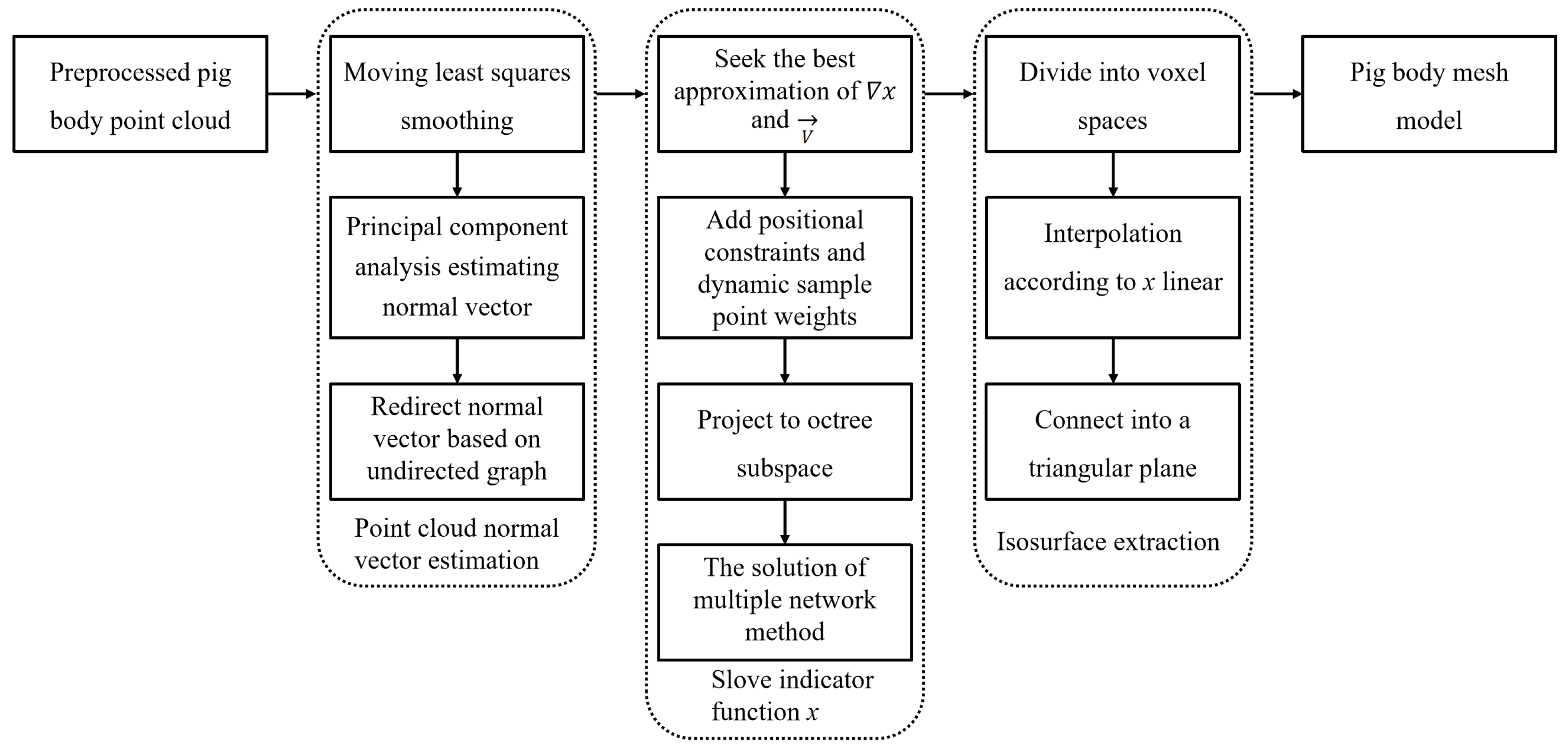
- High-quality target pig point clouds are obtained by using the moving least squares method to further smooth pig body point cloud data for subsequent point cloud reconstruction and volume calculation.
- (2)
- The maximum spanning tree is constructed based on the undirected graph to redirect pig body point cloud normal vector, thus improving the accuracy of the point cloud normal vector, which in turn makes our method conducive to reducing the erroneous reconstruction caused by the Poisson reconstruction algorithm in the complex area of the pig body point cloud.
- (3)
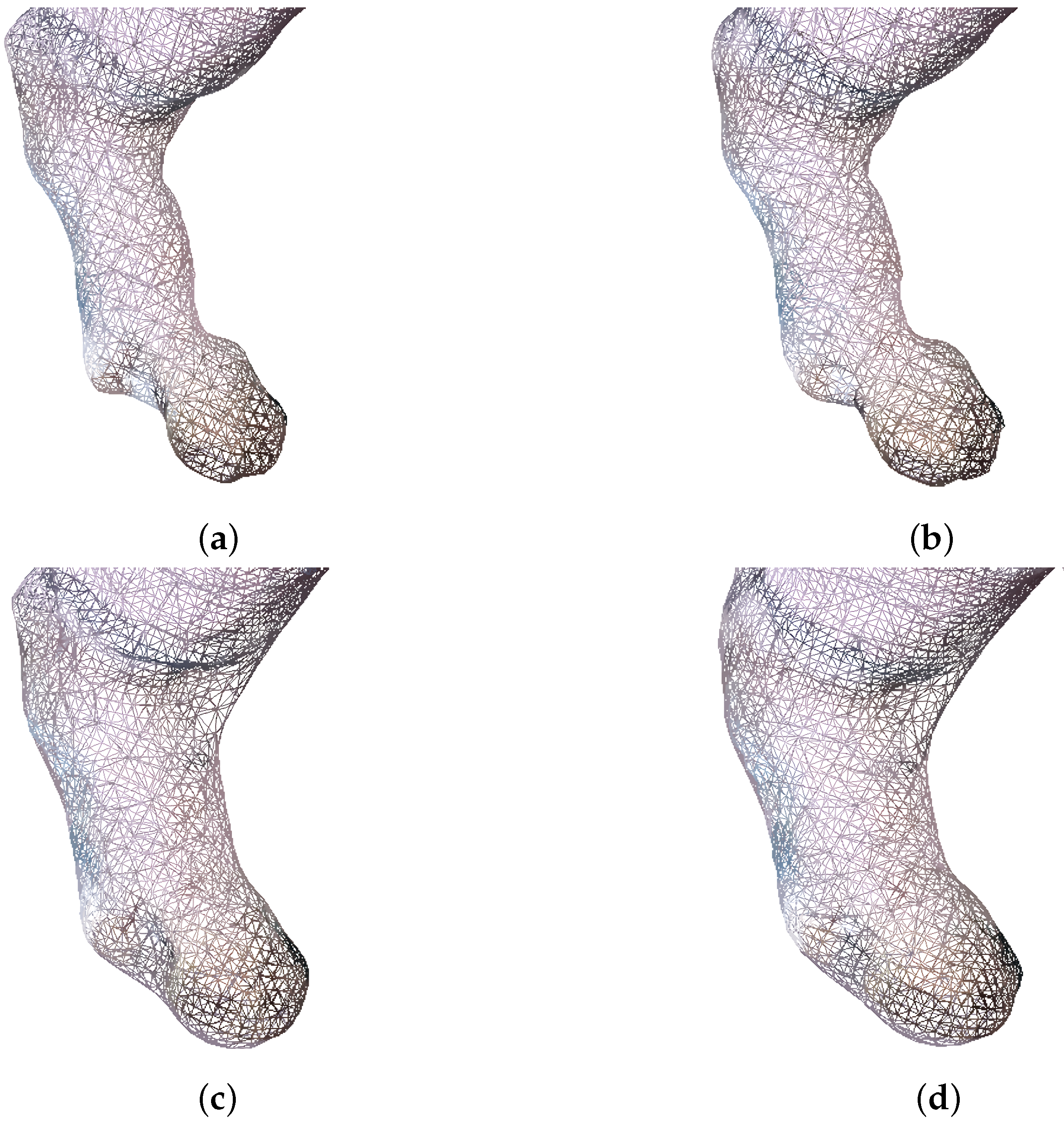
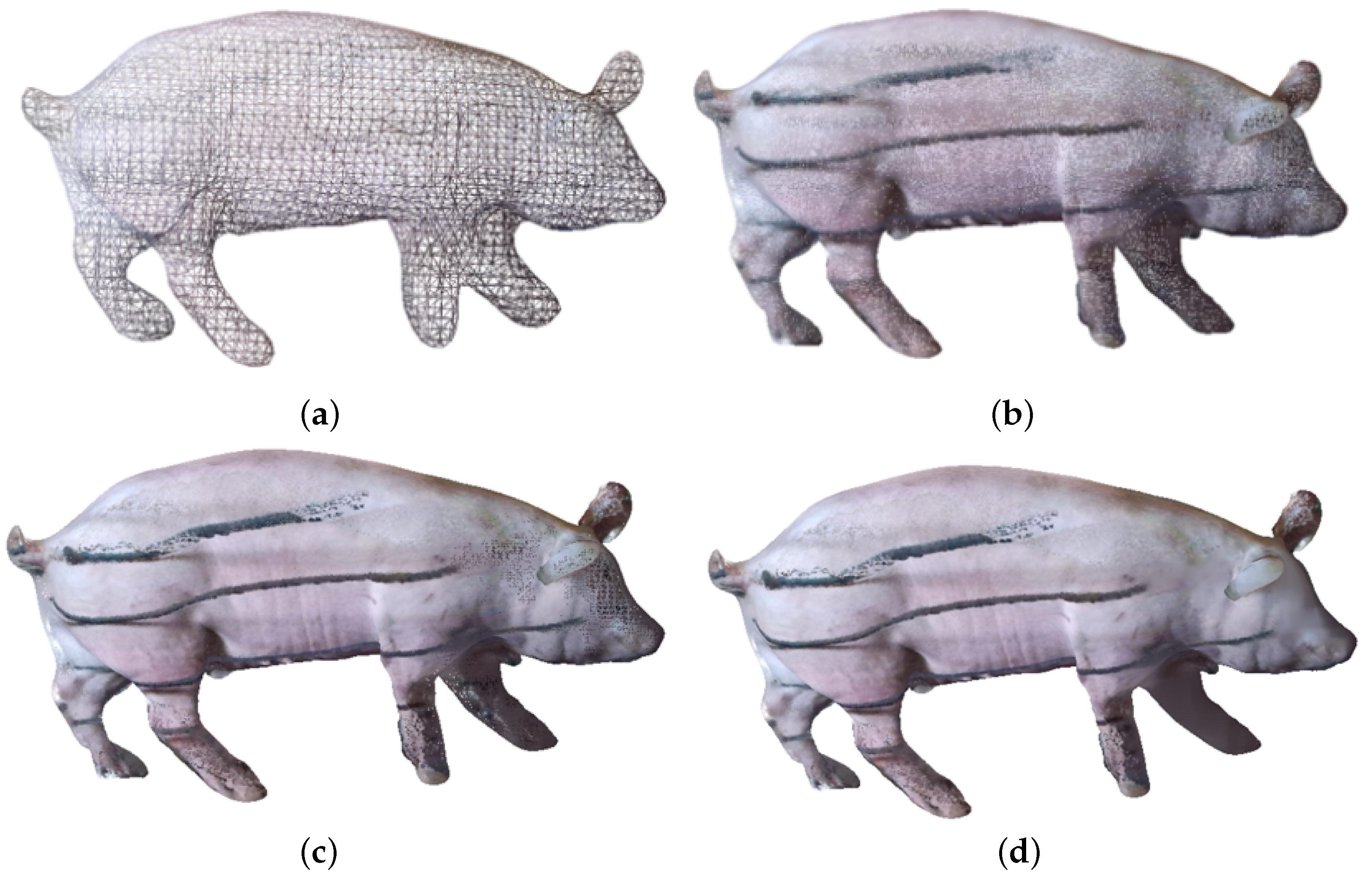
- The improved Poisson reconstruction algorithm, with the addition of position constraints and dynamic sample point weights, can more accurately represent complex surfaces and more advantageously repair small-scale voids in the pig point cloud in actual scenes, and it can reduce the errors generated during reconstruction. Meanwhile, experimental outcomes show that superior reconstruction effects can be achieved in voids and the pig leg point cloud.
- (4)
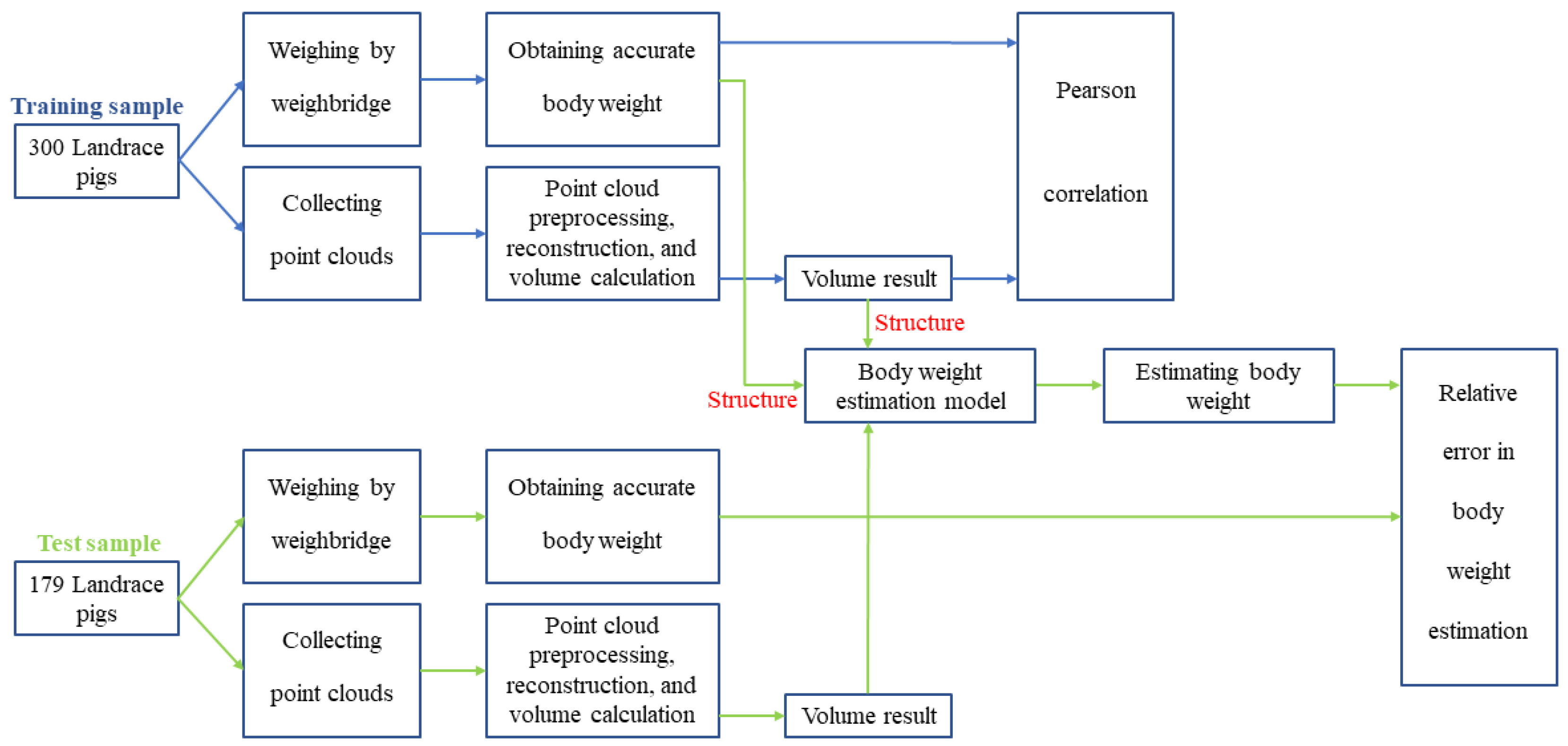
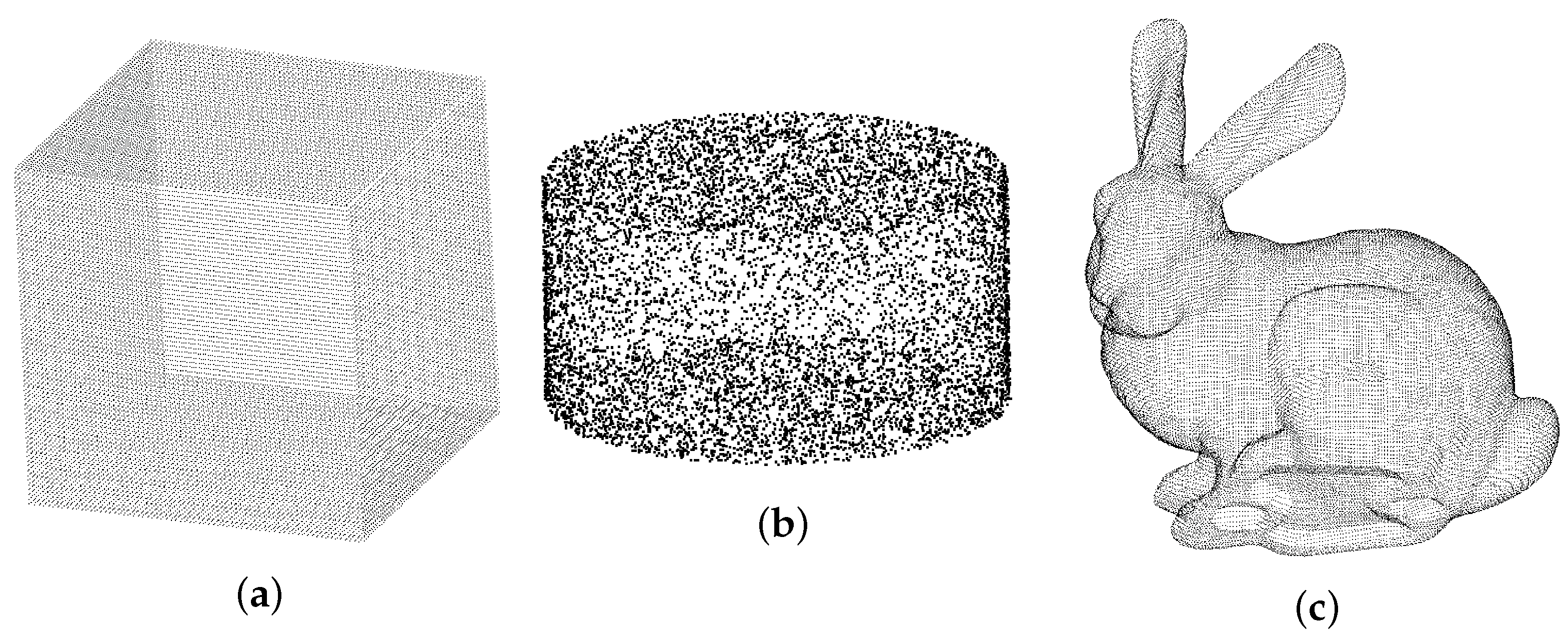
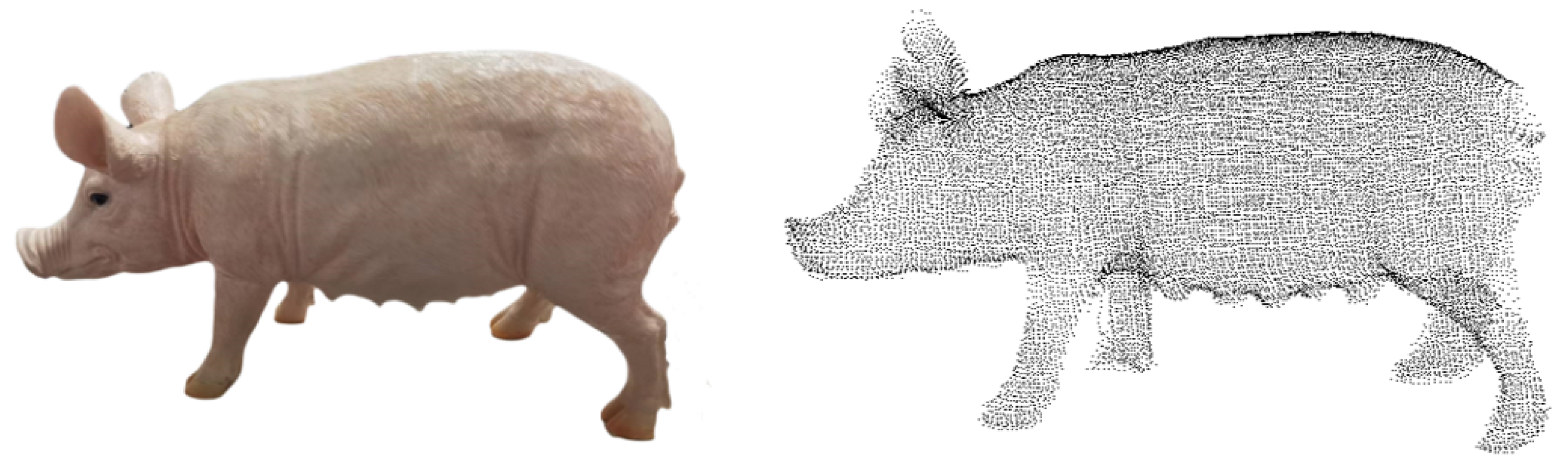
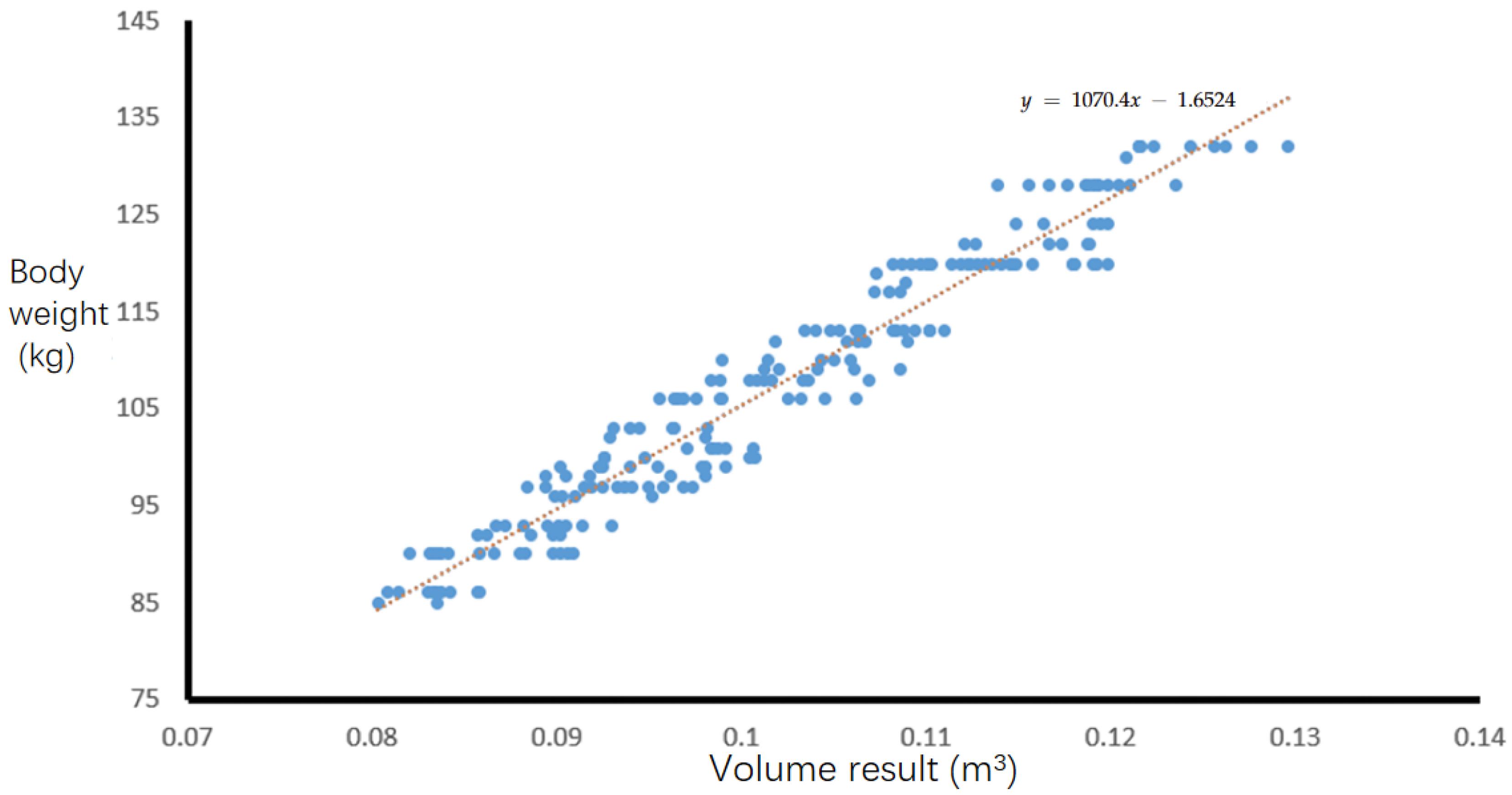
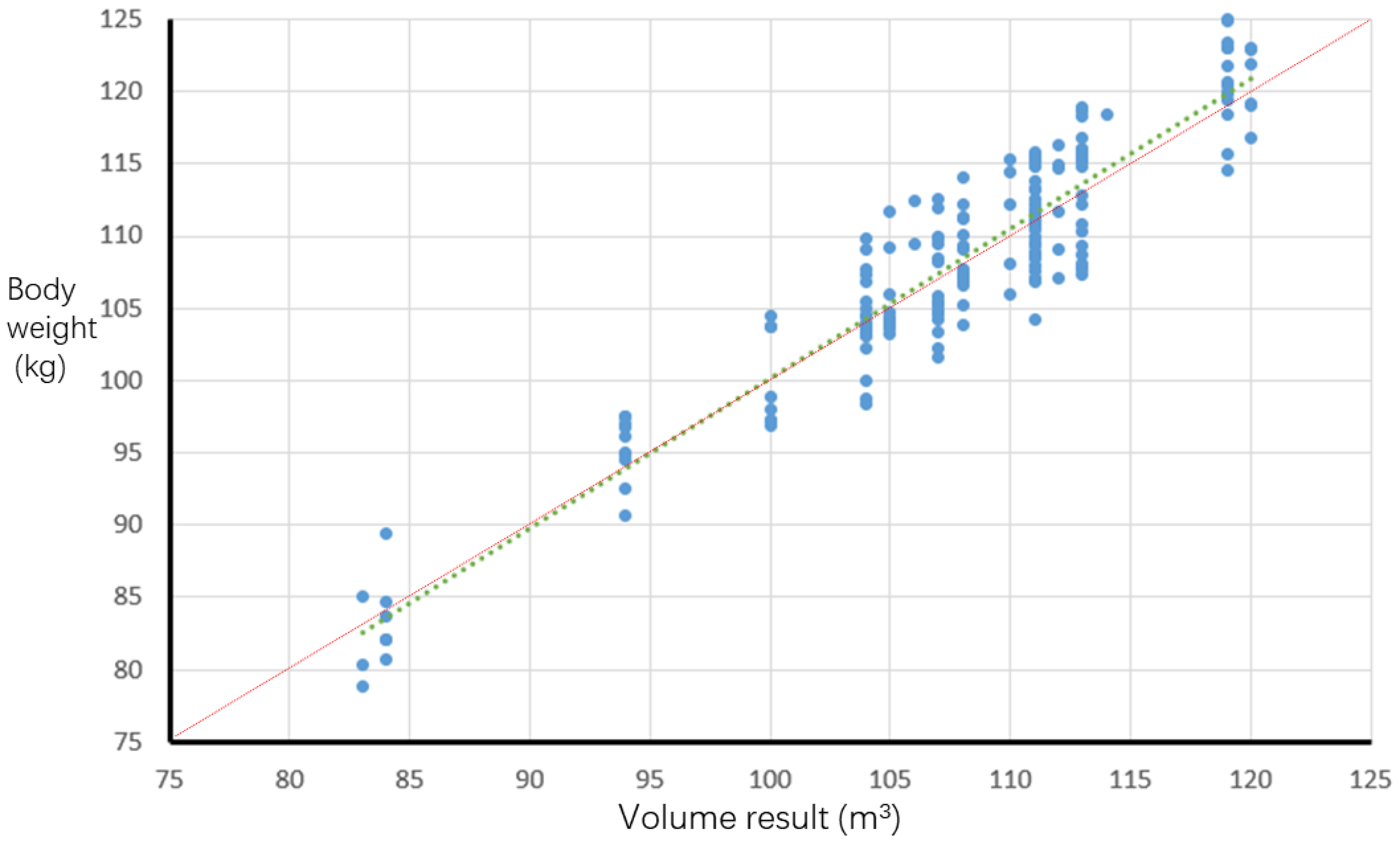
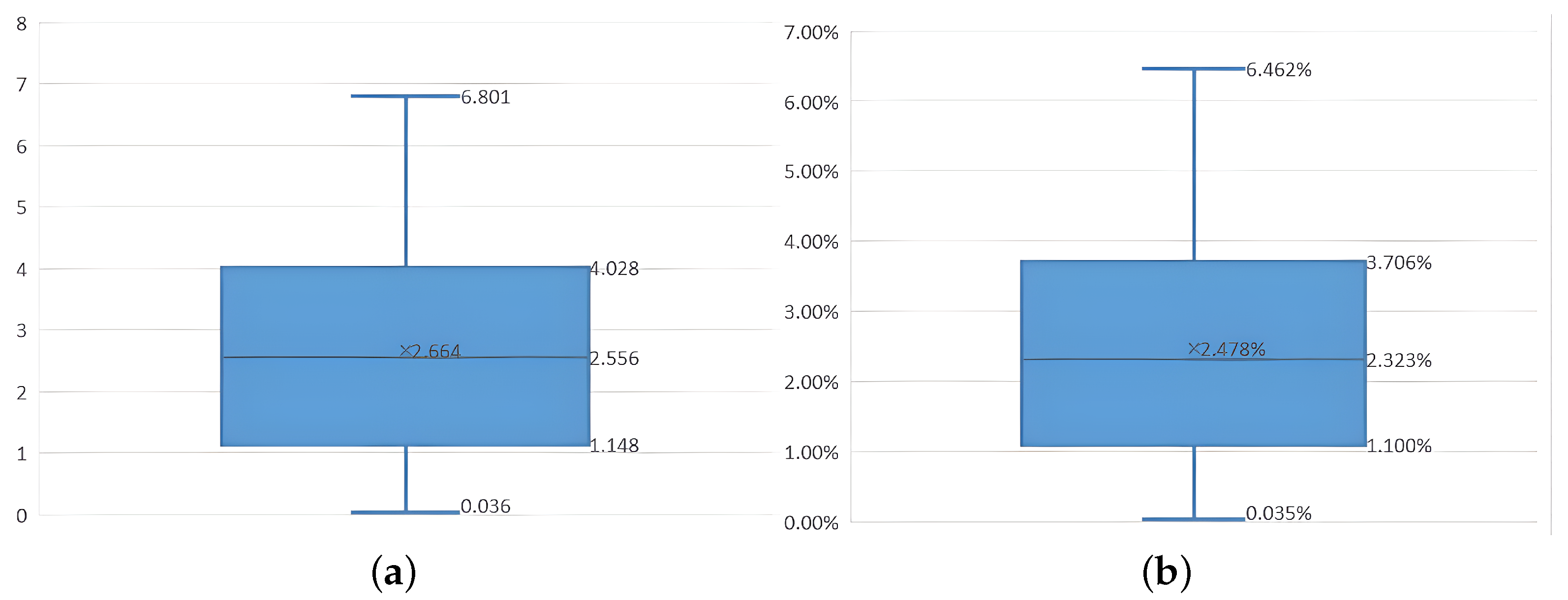
- By decomposing the reconstructed pig mesh model into multiple tetrahedrons, the signed volumes of all tetrahedrons are summed to obtain the mesh model volume. Through the experiments on the standard model, the relative errors of the volume calculation results were all less than 1%, which proves that the tetrahedron summation method has a high accuracy in calculating the volume of the standard model. According to the volume calculation experiment conducted on the piglet model after collecting its point cloud, the relative error of the volume result obtained from Poisson reconstruction was about 5.6%, while the relative error of the volume result obtained from improved Poisson reconstruction was about 4%. The 479 pig point cloud data sets collected from the pig farm were divided into 300 training samples and 179 test samples. An estimation model for body weight was first established by using the volume calculation results of the training sample point cloud. The pig body weight was subsequently estimated using the volume calculation results of 179 test samples. Finally, comparisons were made between the estimated pig body weight and the actual pig body weight for further analyses. The experimental results reveal that the maximum absolute error of body weight estimation was 6.801 kg; the average absolute error was 2.664 kg; the maximum relative error and the average value were 6.462% and 2.478%, respectively. Given the difficulty in obtaining live pig body volume, we put forward in this paper a method to indirectly verify the accuracy of pig body point cloud volume calculation, confirming that the correlation coefficient between pig body volume and pig body weight was 0.95.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Specialized Terminology | Description |
| Cutting | It refers to the process of dividing a large point cloud dataset into multiple subsets, which typically represent different objects or different parts of objects within the point cloud. |
| Cutting direction | When performing segmentation of three-dimensional point cloud data, a directional segmentation strategy can be adopted, which involves selecting one or more predefined directions for segmentation. These directions can align with the standard coordinate axes (X, Y, Z axes) of the point cloud data, or they can be non-axial directions selected based on specific scene requirements. |
| Cutting interval | It refers to the distance selected for segmentation along a specific direction in three-dimensional point cloud data. |
| Point cloud contour fitting | It refers to fitting a set of scattered three-dimensional point clouds into contours with specific geometric shapes using mathematical models. |
| Point cloud multi-contour | Contours of multiple independent objects appear simultaneously in a single point cloud dataset. In a complex scene’s point cloud, there may be multiple different objects, each with its own contours and boundaries. |
| Point cloud multi-contour fitting | It refers to the process of analyzing and processing complex point cloud data to identify and fit the multiple contours of these objects. |
| Slice | Point cloud slicing refers to subsets obtained by cutting three-dimensional point cloud data along specific directions, which can be viewed as polygonal prisms. |
| Slice contour | Slice contour defines the bottom contour of the prism. |
| Slice integration | It refers to a technique used to calculate the volume of three-dimensional point clouds. For more details, refer to Zhi et al. [36]. |
| Slice interval, Slice spacing | The slice interval defines the height of the prism. |
| Slice projection | It refers to the process of projecting a prism onto a two-dimensional plane. |
References
- He, D.; Liu, D.; Zhao, K. Review of perceiving animal information and behavior in precision livestock farming. Trans. Chin. Soc. Agric. Mach. 2016, 47, 231–244. [Google Scholar]
- Wongsriworaphon, A.; Arnonkijpanich, B.; Pathumnakul, S. An approach based on digital image analysis to estimate the live weights of pigs in farm environments. Comput. Electron. Agric. 2015, 115, 26–33. [Google Scholar] [CrossRef]
- Menesatti, P.; Costa, C.; Antonucci, F.; Steri, R.; Pallottino, F.; Catillo, G. A low-cost stereovision system to estimate size and weight of live sheep. Comput. Electron. Agric. 2014, 103, 33–38. [Google Scholar] [CrossRef]
- Banhazi, T.; Tscharke, M.; Ferdous, W.; Saunders, C.; Lee, S. Improved image analysis based system to reliably predict the live weight of pigs on farm: Preliminary results. Aust. J. Multi-Discip. Eng. 2011, 8, 107–119. [Google Scholar] [CrossRef]
- Li, G.; Liu, X.; Ma, Y.; Wang, B.; Zheng, L.; Wang, M. Body size measurement and live body weight estimation for pigs based on back surface point clouds. Biosyst. Eng. 2022, 218, 10–22. [Google Scholar] [CrossRef]
- Liu, T.H.; Li, Z.; Teng, G.H.; Luo, C. Prediction of pig weight based on radical basis function neural network. Trans. Chin. Soc. Agric. Mach. 2013, 44, 245–249. [Google Scholar]
- Wu, Y.; Liu, Z.Y.; Gu, Y.N.; Zhao, H.J. Sow weight estimation based on machine vision. Electron. Technol. Softw. Eng. 2020, 01, 100–101. [Google Scholar]
- Chen, H.; Liang, Y.; Huang, H.; Huang, Q.; Gu, W.; Liang, H. Live pig-weight learning and prediction method based on a multilayer RBF network. Agriculture 2023, 13, 253. [Google Scholar] [CrossRef]
- Nguyen, A.H.; Holt, J.P.; Knauer, M.T.; Abner, V.A.; Lobaton, E.J.; Young, S.N. Towards rapid weight assessment of finishing pigs using a handheld, mobile RGB-D camera. Biosyst. Eng. 2023, 226, 155–168. [Google Scholar] [CrossRef]
- Thapar, G.; Biswas, T.K.; Bhushan, B.; Naskar, S.; Kumar, A.; Dandapat, P.; Rokhade, J. Accurate estimation of body weight of pigs through smartphone image measurement app. Smart Agric. Technol. 2023, 4, 100194. [Google Scholar] [CrossRef]
- Cang, Y.; He, H.; Qiao, Y. An intelligent pig weights estimate method based on deep learning in sow stall environments. IEEE Access 2019, 7, 164867–164875. [Google Scholar] [CrossRef]
- Du, X.D.; Li, X.X.; Fan, S.R.; Yan, Z.C.; Ding, X.D.; Yang, J.F.; Zhang, L.P. A review of the methods of pig body size measurement and body weight estimation. Chin. J. Anim. Sci. 2023, 59, 41–46+56. [Google Scholar] [CrossRef]
- Cominotte, A.; Fernandes, A.; Dorea, J.; Rosa, G.; Ladeira, M.; Van Cleef, E.; Pereira, G.; Baldassini, W.; Neto, O.M. Automated computer vision system to predict body weight and average daily gain in beef cattle during growing and finishing phases. Livest. Sci. 2020, 232, 103904. [Google Scholar] [CrossRef]
- Condotta, I.C.; Brown-Brandl, T.M.; Silva-Miranda, K.O.; Stinn, J.P. Evaluation of a depth sensor for mass estimation of growing and finishing pigs. Biosyst. Eng. 2018, 173, 11–18. [Google Scholar] [CrossRef]
- Kongsro, J. Estimation of pig weight using a Microsoft Kinect prototype imaging system. Comput. Electron. Agric. 2014, 109, 32–35. [Google Scholar] [CrossRef]
- Paudel, S.; de Sousa, R.V.; Sharma, S.R.; Brown-Brandl, T. Deep Learning Models to Predict Finishing Pig Weight Using Point Clouds. Animals 2023, 14, 31. [Google Scholar] [CrossRef]
- Fu, W.; Teng, G.; Yang, Y. Research on three-dimensional model of pig’s weight estimating. Trans. CSAE 2006, 22, 84–87. [Google Scholar]
- Chu, M.Y. Research on Body Size Measurement and Weight Estimation of Cow Based on Three-Dimensional Reconstruction. Master’s Thesis, Hebei Agricultural University, Baoding, China, 2021. [Google Scholar]
- Hao, H.; Jincheng, Y.; Ling, Y.; Gengyuan, C.; Sumin, Z.; Huan, Z. An improved PointNet++ point cloud segmentation model applied to automatic measurement method of pig body size. Comput. Electron. Agric. 2023, 205, 107560. [Google Scholar] [CrossRef]
- Okayama, T.; Kubota, Y.; Toyoda, A.; Kohari, D.; Noguchi, G. Estimating body weight of pigs from posture analysis using a depth camera. Anim. Sci. J. 2021, 92, e13626. [Google Scholar] [CrossRef]
- Pezzuolo, A.; Guarino, M.; Sartori, L.; González, L.A.; Marinello, F. On-barn pig weight estimation based on body measurements by a Kinect v1 depth camera. Comput. Electron. Agric. 2018, 148, 29–36. [Google Scholar] [CrossRef]
- Wang, K.; Guo, H.; Ma, Q.; Su, W.; Chen, L.; Zhu, D. A portable and automatic Xtion-based measurement system for pig body size. Comput. Electron. Agric. 2018, 148, 291–298. [Google Scholar] [CrossRef]
- Le Cozler, Y.; Allain, C.; Caillot, A.; Delouard, J.; Delattre, L.; Luginbuhl, T.; Faverdin, P. High-precision scanning system for complete 3D cow body shape imaging and analysis of morphological traits. Comput. Electron. Agric. 2019, 157, 447–453. [Google Scholar] [CrossRef]
- Ozkaya, S.; Neja, W.; Krezel-Czopek, S.; Oler, A. Estimation of bodyweight from body measurements and determination of body measurements on Limousin cattle using digital image analysis. Anim. Prod. Sci. 2015, 56, 2060–2063. [Google Scholar] [CrossRef]
- Pezzuolo, A.; Guarino, M.; Sartori, L.; Marinello, F. A feasibility study on the use of a structured light depth-camera for three-dimensional body measurements of dairy cows in free-stall barns. Sensors 2018, 18, 673. [Google Scholar] [CrossRef]
- Ruchay, A.; Kober, V.; Dorofeev, K.; Kolpakov, V.; Miroshnikov, S. Accurate body measurement of live cattle using three depth cameras and non-rigid 3-D shape recovery. Comput. Electron. Agric. 2020, 179, 105821. [Google Scholar] [CrossRef]
- Shuai, S.; Ling, Y.; Shihao, L.; Haojie, Z.; Xuhong, T.; Caixing, L.; Aidong, S.; Hanxing, L. Research on 3D surface reconstruction and body size measurement of pigs based on multi-view RGB-D cameras. Comput. Electron. Agric. 2020, 175, 105543. [Google Scholar] [CrossRef]
- Weales, D.; Moussa, M.; Tarry, C. A robust machine vision system for body measurements of beef calves. Smart Agric. Technol. 2021, 1, 100024. [Google Scholar] [CrossRef]
- Yin, L.; Cai, G.; Tian, X.; Sun, A.; Shi, S.; Zhong, H.; Liang, S. Three dimensional point cloud reconstruction and body size measurement of pigs based on multi-view depth camera. Trans. Chin. Soc. Agric. Eng. 2019, 35, 201–208. [Google Scholar]
- Du, A.; Guo, H.; Lu, J.; Su, Y.; Ma, Q.; Ruchay, A.; Marinello, F.; Pezzuolo, A. Automatic livestock body measurement based on keypoint detection with multiple depth cameras. Comput. Electron. Agric. 2022, 198, 107059. [Google Scholar] [CrossRef]
- Luo, X.; Hu, Y.; Gao, Z.; Guo, H.; Su, Y. Automated measurement of livestock body based on pose normalisation using statistical shape model. Biosyst. Eng. 2023, 227, 36–51. [Google Scholar] [CrossRef]
- Liu, Y.; Zhou, J.; Bian, Y.; Wang, T.; Xue, H.; Liu, L. Estimation of Weight and Body Measurement Model for Pigs Based on Back Point Cloud Data. Animals 2024, 14, 1046. [Google Scholar] [CrossRef] [PubMed]
- Xu, J.; Moyer, D.; Grant, P.E.; Golland, P.; Iglesias, J.E.; Adalsteinsson, E. SVoRT: Iterative transformer for slice-to-volume registration in fetal brain MRI. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Singapore, 18–22 September 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 3–13. [Google Scholar]
- Kwon, K.; Mun, D. Iterative offset-based method for reconstructing a mesh model from the point cloud of a pig. Comput. Electron. Agric. 2022, 198, 106996. [Google Scholar] [CrossRef]
- Qiao, J.F.; Zhou, Y.Z.; Wang, Y.; Fan, X.; Nong, Y.H.; Li, B.Y.; Zi, W.H. Advances in 3D laser scanning volume measurement technology and application. Laser Infrared 2021, 51, 1115–1122. [Google Scholar]
- Zhi, Y.; Zhang, Y.; Chen, H.; Yang, K.; Xia, H. A method of 3d point cloud volume calculation based on slice method. In Proceedings of the 2016 International Conference on Intelligent Control and Computer Application (ICCA 2016), Zhengzhou, China, 16–17 January 2016; Atlantis Press: Amsterdam, The Netherlands, 2016; pp. 155–158. [Google Scholar]
- Bi, X.W.; Zhang, J.C.; Chen, Y.; Yan, X.G.; Li, B. A method for calculating point cloud object volume based on opposite-direction slicing method. J. Gansu Sci. 2021, 33, 18–26. [Google Scholar]
- Chang, W.C.; Wu, C.H.; Tsai, Y.H.; Chiu, W.Y. Object volume estimation based on 3D point cloud. In Proceedings of the 2017 International Automatic Control Conference (CACS), Pingtung, Taiwan, 12–15 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–5. [Google Scholar]
- Liu, D.L.; Wang, J.X. Calculation of mass center and volume of irregular objects. Geotech. Investig. Surv. 2021, 49, 46–50. [Google Scholar]
- Biljecki, F.; Ledoux, H.; Stoter, J. Error propagation in the computation of volumes in 3D city models with the Monte Carlo method. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 31–39. [Google Scholar] [CrossRef]
- Covre, N.; Luchetti, A.; Lancini, M.; Pasinetti, S.; Bertolazzi, E.; De Cecco, M. Monte Carlo-based 3D surface point cloud volume estimation by exploding local cubes faces. Acta IMEKO 2022, 2022, 1–9. [Google Scholar] [CrossRef]
- Jaekel, U. A Monte Carlo method for high-dimensional volume estimation and application to polytopes. Procedia Comput. Sci. 2011, 4, 1403–1411. [Google Scholar] [CrossRef]
- Raychaudhuri, S. Introduction to Monte Carlo simulation. In Proceedings of the 2008 Winter Simulation Conference, Miami, FL, USA, 7–10 December 2008; pp. 91–100. [Google Scholar]
- Lv, X.; Wu, J.; Zhang, M.; Zhang, B.; Li, N. Volume measurement study of 3D medical reconstruction model based on Quasi-Monte Carlo method. Appl. Res. Comput. 2014, 31, 612–614+618. [Google Scholar]
- Chen, S.; Zhang, S.; Liu, M.; Zheng, R. Underwater terrain three-dimensional reconstruction algorithm based on improved Delaunay triangulation. Comput. Sci. 2020, 47, 137–141. [Google Scholar]
- Jie, Y.; Pin, L.; Changwen, Z. A comparative research on methods of delaunay triangulation. Image Graph 2010, 15, 1158–1167. [Google Scholar]
- Kazhdan, M.; Hoppe, H. Screened poisson surface reconstruction. ACM Trans. Graph. (ToG) 2013, 32, 1–13. [Google Scholar] [CrossRef]
- Ouyang, N.; Yang, B.W. Three-dimensional point cloud reconstruction of normal estimated screened Poisson algorithm. TV Technol. 2017, 41, 237–242. [Google Scholar] [CrossRef]
- Stanford University. The Stanford 3D Scanning Repository. 2014. Available online: https://graphics.stanford.edu/data/3Dscanrep/ (accessed on 1 April 2023).
- Cheng, L.F. Research and Implementation of the Volume Calculation of Cattle Based on Point Cloud. Master’s Thesis, Northwest A&F University, Xianyang, China, 2016. [Google Scholar]
- Guo, X.F.; Gu, Y.N.; Xie, R.J. Development and research of pig weight measurement system based on laser thunder based on laser radar. Comput. Meas. Control 2022, 30, 88–94. [Google Scholar] [CrossRef]
- Lin, R.; Hu, H.; Wen, Z.; Yin, L. Research on denoising and segmentation algorithm application of pigs’ point cloud based on DBSCAN and PointNet. In Proceedings of the 2021 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), Trento-Bolzano, Italy, 3–5 November 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 42–47. [Google Scholar]
- Ren, H.; Cheng, J.; Huang, A. The complex variable interpolating moving least-squares method. Appl. Math. Comput. 2012, 219, 1724–1736. [Google Scholar] [CrossRef]
- Sanchez, J.; Denis, F.; Coeurjolly, D.; Dupont, F.; Trassoudaine, L.; Checchin, P. Robust normal vector estimation in 3D point clouds through iterative principal component analysis. ISPRS J. Photogramm. Remote Sens. 2020, 163, 18–35. [Google Scholar] [CrossRef]
- Jakob, J.; Buchenau, C.; Guthe, M. Parallel globally consistent normal orientation of raw unorganized point clouds. In Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2019; Volume 38, pp. 163–173. [Google Scholar]
- Haoran, L.; Tiancan, M.; Zhi, G. 3D face reconstruction based on global ICP and improved Poisson. Acta Geod. Cartogr. Sin. 2023, 52, 454. [Google Scholar]
- Liu, J.; Li, H. Volume measurement of irregular objects based on improved point cloud slicing method. Acta Opt. Sin. 2021, 41, 133–145. [Google Scholar]
- Salazar-Cuytun, R.; Garcia-Herrera, R.A.; Munoz-Benitez, A.L.; Munoz-Osorio, G.; Camacho-Perez, E.; Ptacek, M.; Portillo-Salgado, R.; Vargas-Bello-Perez, E.; Canul, A.J.C. Relationship between body volume and body weight in Pelibuey ewes. Trop. Subtrop. Agroecosystems 2021, 24, 1–7. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Poisson Reconstruction | Improved Poisson Reconstruction | |||
|---|---|---|---|---|
| Depth | Time (s) | Number of Triangular Facets | Time (s) | Number of Triangular Facets |
| 6 | 0.328 | 8802 | 0.554 | 9322 |
| 8 | 2.251 | 109,350 | 2.343 | 122,734 |
| 10 | 7.854 | 451,246 | 8.192 | 458,122 |
| 12 | 12.891 | 493,294 | 16.408 | 546,662 |
| Model | True Volume Value | Slicing Method | Poisson Reconstruction, d = 8 | Poisson Reconstruction, d = 12 | Improved Poisson Reconstruction, d = 8 | Improved Poisson Reconstruction, d = 12 |
|---|---|---|---|---|---|---|
| Cube | 1 | 0.9999 | 1.0009 | 1.0009 | 0.9992 | 0.9992 |
| Cylinder | 3.1415 | 3.1483 | 3.126 | 3.126 | 3.1245 | 3.1244 |
| Rabbit | 753,955 | 936,250 | 756,517 | 756,501 | 755,526 | 755,515 |
| Model | Slicing Method | Poisson Reconstruction, d = 8 | Poisson Reconstruction, d = 12 | Improved Poisson Reconstruction, d = 8 | Improved Poisson Reconstruction, d = 12 |
|---|---|---|---|---|---|
| Cube | 0.01% | 0.09% | 0.09% | 0.08% | 0.08% |
| Cylinder | 0.2164% | 0.4933% | 0.4933% | 0.5411% | 0.5443% |
| Rabbit | 24.1784% | 0.3398% | 0.3376% | 0.2083% | 0.2069% |
| Reconstruction Method | Volume Result | Absolute Error | Relative Error |
|---|---|---|---|
| Poisson reconstruction, d = 6 | 4788.3 | 251 | 5.532% |
| Poisson reconstruction, d = 8 | 4283.5 | 253.8 | 5.5936% |
| Poisson reconstruction, d = 12 | 4283.6 | 253.7 | 5.591% |
| Improved Poisson reconstruction, d = 6 | 4803.1 | 265.8 | 5.858% |
| Improved Poisson reconstruction, d = 8 | 4350.9 | 186.4 | 4.1081% |
| Improved Poisson reconstruction, d = 12 | 4352.1 | 185.2 | 4.0817% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, J.; Chen, H.; Wu, R.; Wang, X.; Liu, X.; Wang, H.; Wu, Z.; Cai, G.; Yin, L.; Lin, R.; et al. Calculating Volume of Pig Point Cloud Based on Improved Poisson Reconstruction. Animals 2024, 14, 1210. https://doi.org/10.3390/ani14081210
Lin J, Chen H, Wu R, Wang X, Liu X, Wang H, Wu Z, Cai G, Yin L, Lin R, et al. Calculating Volume of Pig Point Cloud Based on Improved Poisson Reconstruction. Animals. 2024; 14(8):1210. https://doi.org/10.3390/ani14081210
Chicago/Turabian StyleLin, Junyong, Hongyu Chen, Runkang Wu, Xueyin Wang, Xinchang Liu, He Wang, Zhenfang Wu, Gengyuan Cai, Ling Yin, Runheng Lin, and et al. 2024. "Calculating Volume of Pig Point Cloud Based on Improved Poisson Reconstruction" Animals 14, no. 8: 1210. https://doi.org/10.3390/ani14081210
APA StyleLin, J., Chen, H., Wu, R., Wang, X., Liu, X., Wang, H., Wu, Z., Cai, G., Yin, L., Lin, R., Zhang, H., & Zhang, S. (2024). Calculating Volume of Pig Point Cloud Based on Improved Poisson Reconstruction. Animals, 14(8), 1210. https://doi.org/10.3390/ani14081210