Analysis, Design, and Experimental Research of a Novel Wheelchair-Stretcher Assistive Robot

 , ,
, , 
Abstract
:Featured Application
Abstract

1. Introduction
- (1)
- The technology of transport devices in moving patients from bed to stretcher, or from stretcher to bed, is more mature; but it is difficult to transform the stretcher to a wheelchair.
- (2)
- The research on the multi-function nursing bed mainly focuses on the change of bed structure. There are two main forms; one is that the middle part of the bed structure is changed directly into a wheelchair; the other is that one side of the bed structure is transformed into a wheelchair. However, for these two methods, not only the sheets need to be customized, but also the mattress under the body needs to be moved with the patient which resulted in a deterioration of the patient’s experience.
- (3)
- The research technology of humanoid assistive robot is advanced, but it is expensive and is far away from industrial application.
- (4)
- It has always been a difficult problem for patients to go to the toilet. Although the research institutions have put forward some ideas, they have not been able to successfully develop the right products.
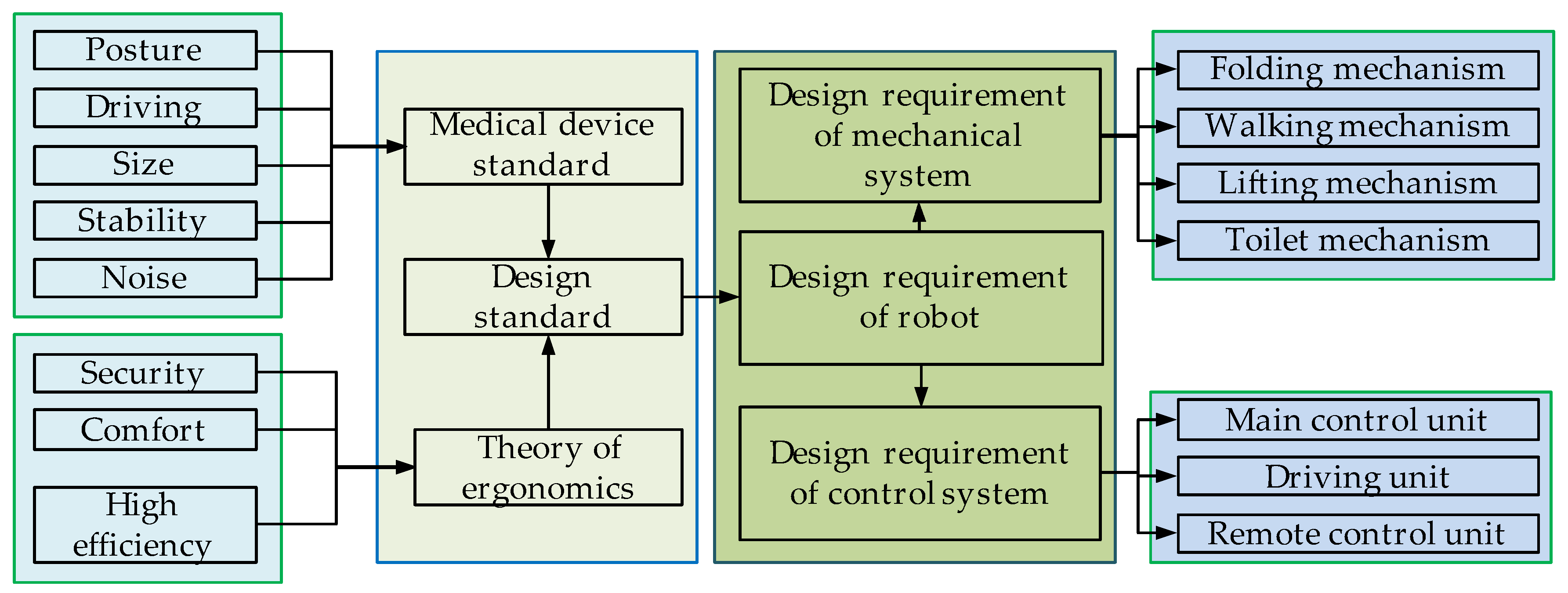
2. Mechanical Structure Design of the Wheelchair-Stretcher Assistive Robot
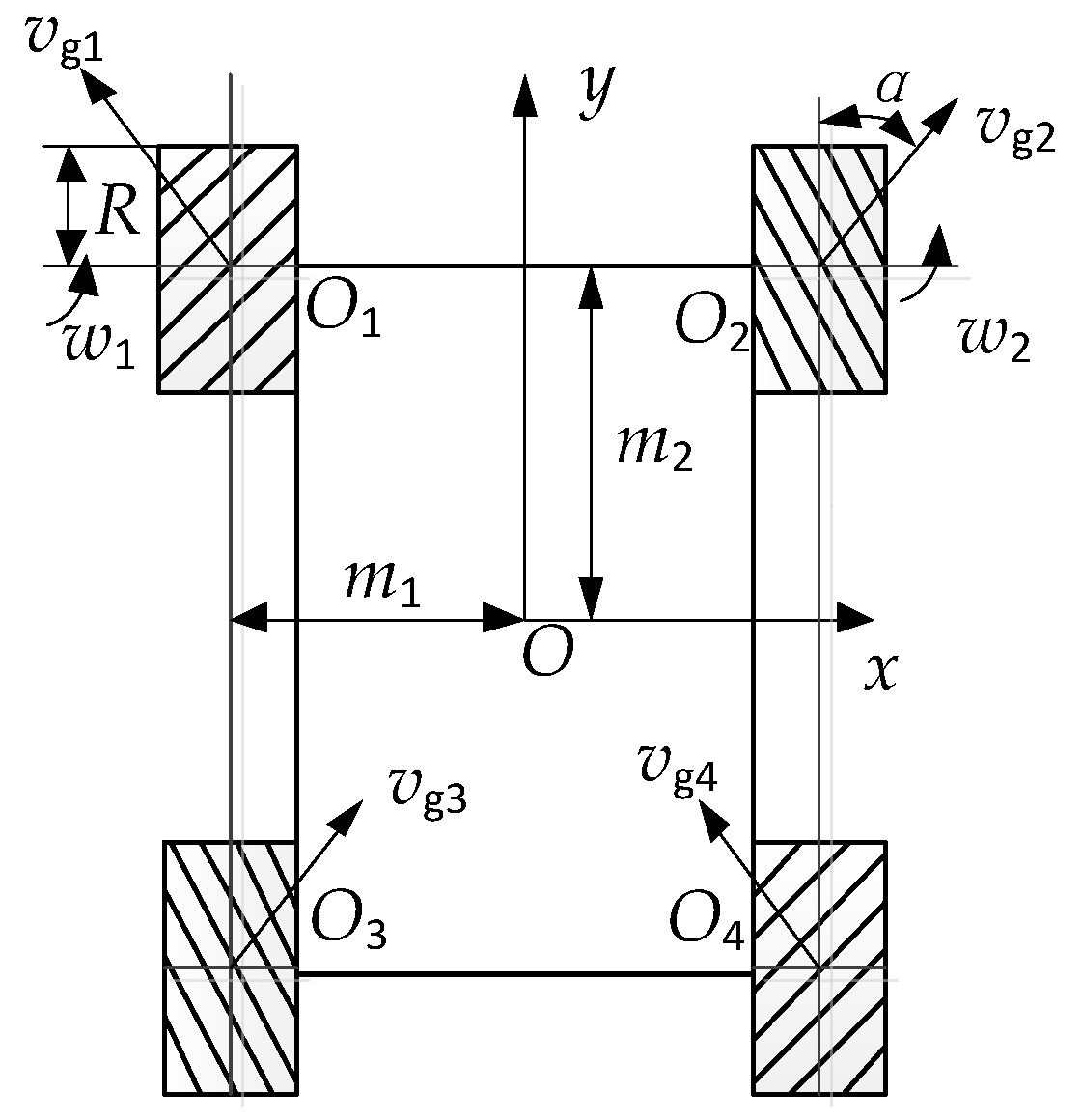
2.1. Kinematics Analysis and Structure Design of the Walking Mechanism
2.1.1. Kinematics Analysis of the Walking Mechanism
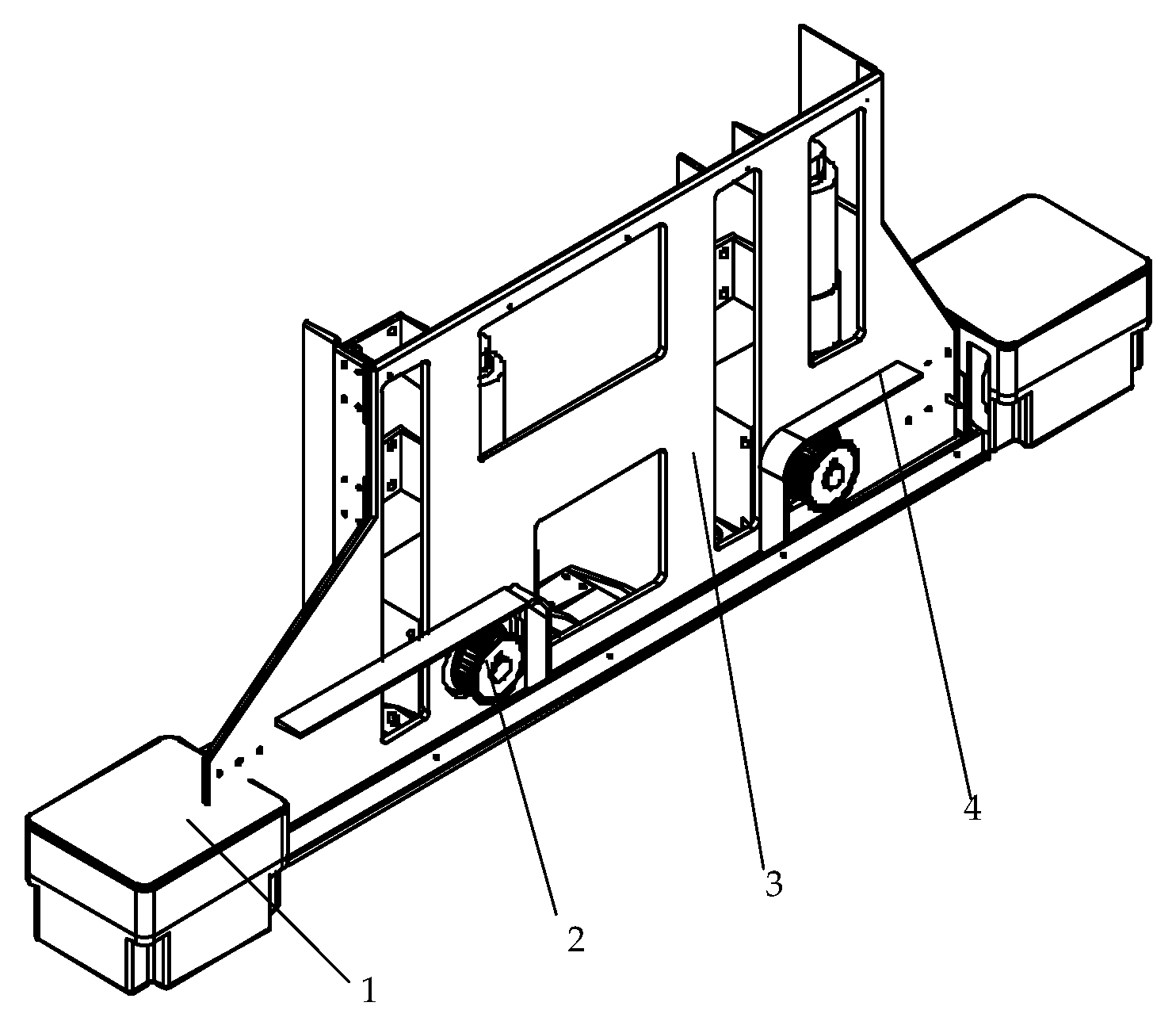
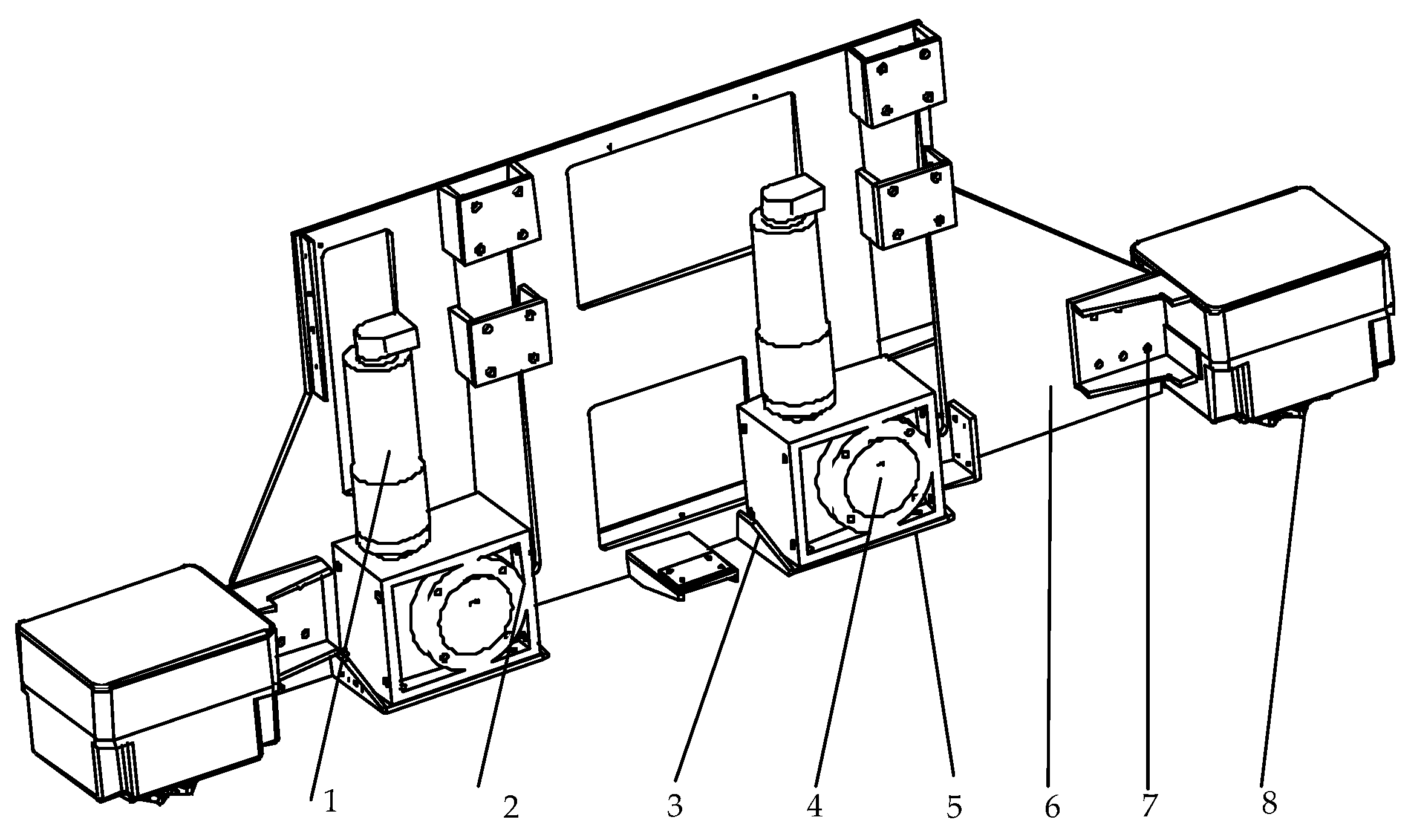
2.1.2. Structure Design of the Walking Mechanism
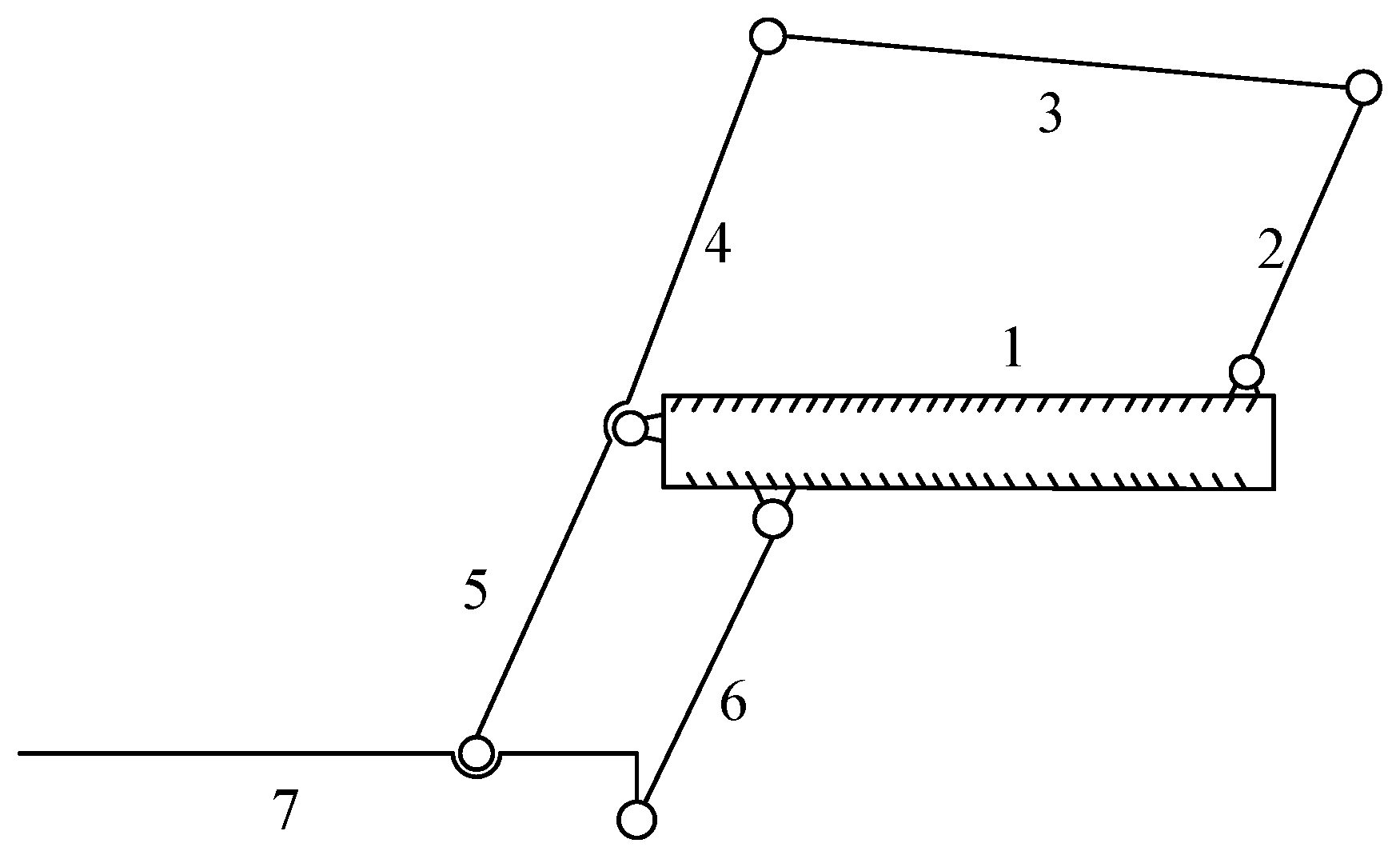
2.2. Kinematics, Dynamics Analysis and Optimization of the Folding Mehanism
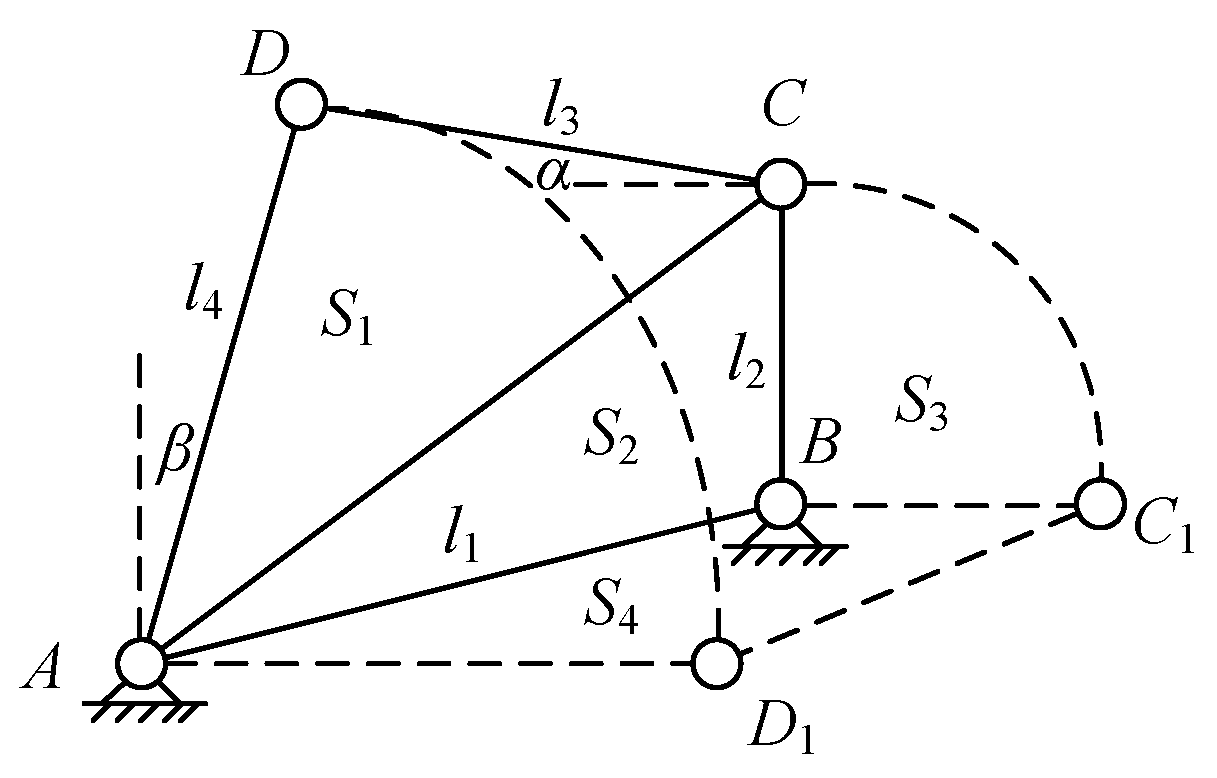
2.2.1. Kinematics Analysis and Parameters Optimization of the Folding Mechanism
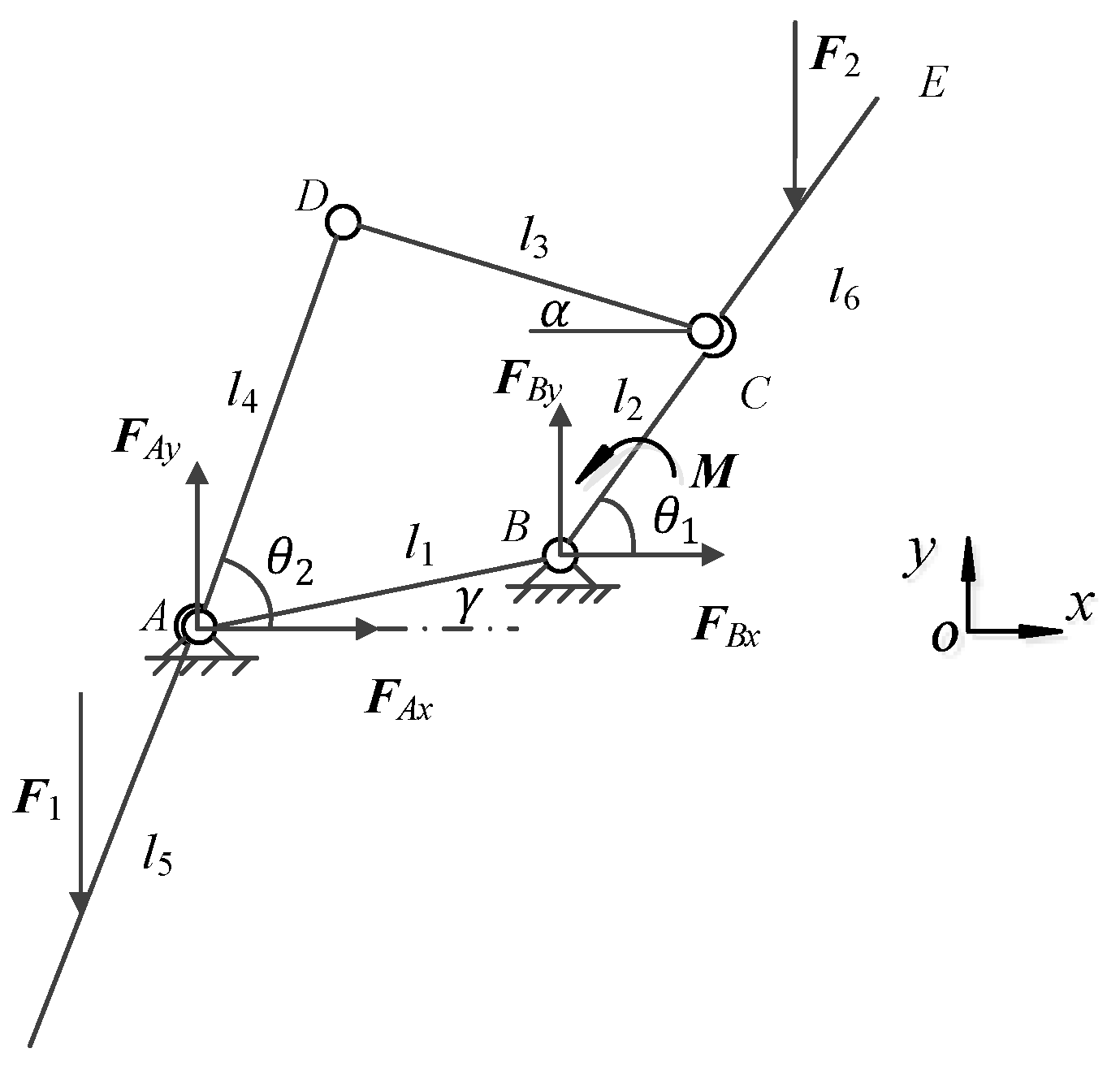
2.2.2. Force Analysis of the Folding Mechanism
2.2.3. Driving Device Computation of the Folding Mechanism
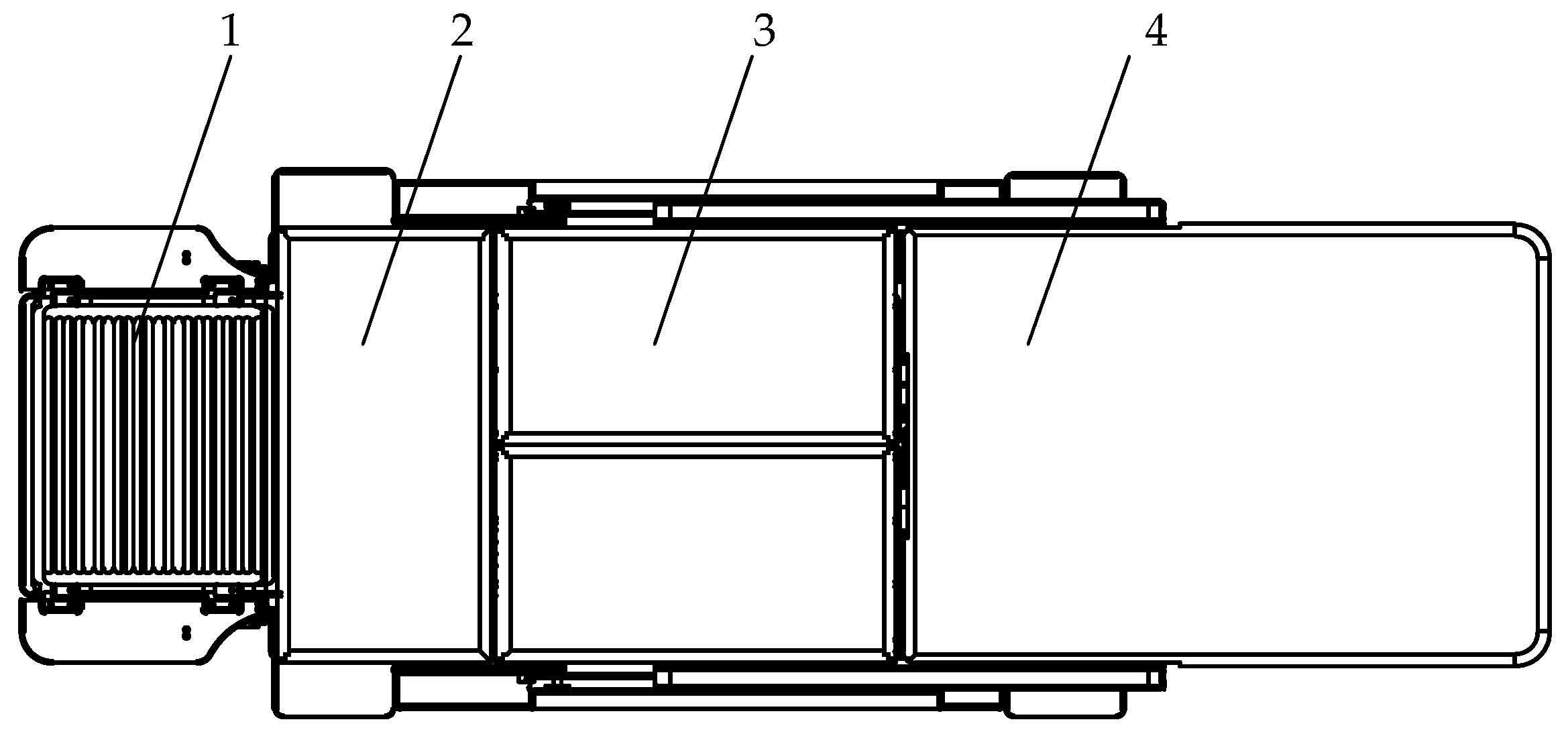
2.2.4. Design of the Folding Mechanism
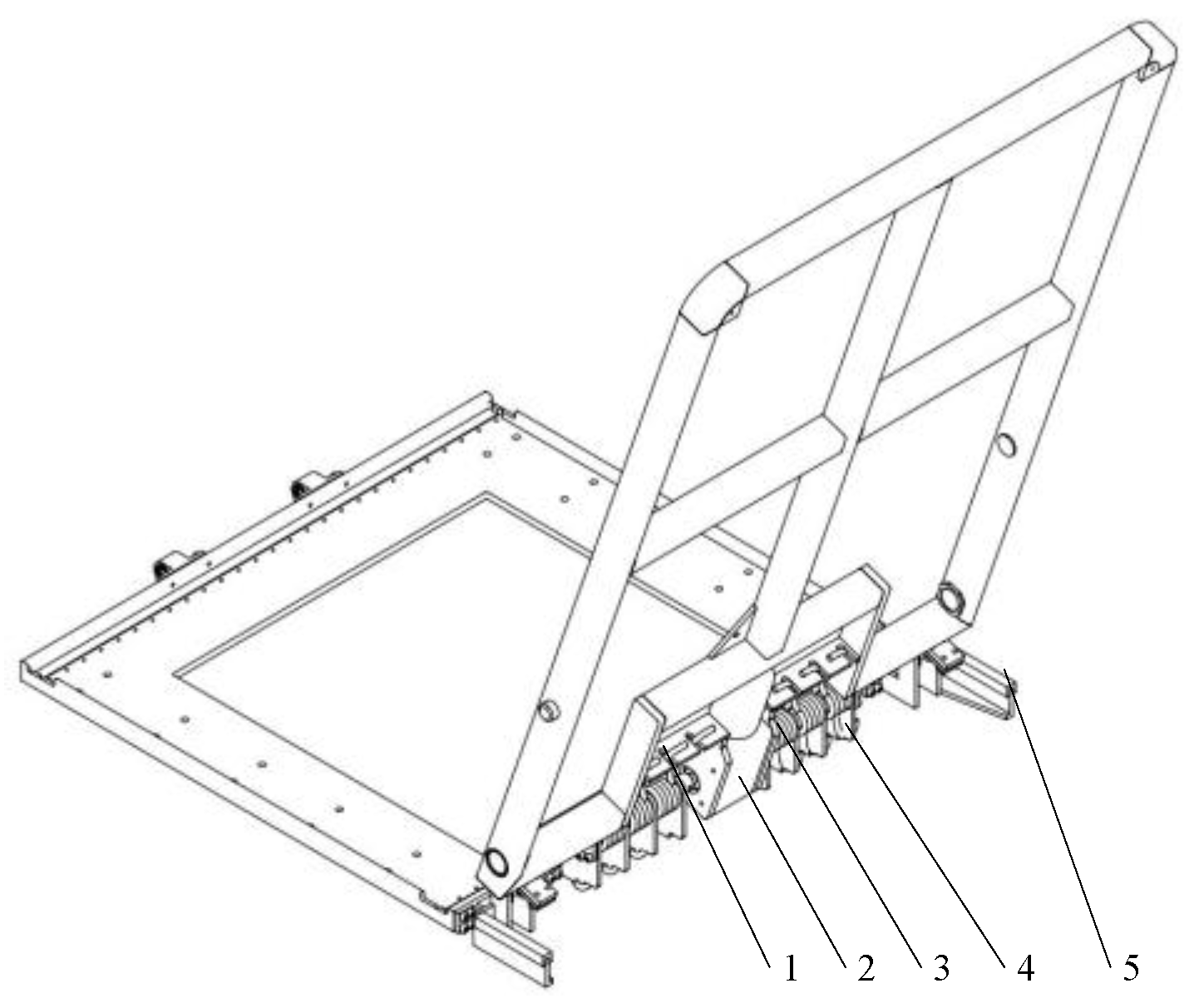
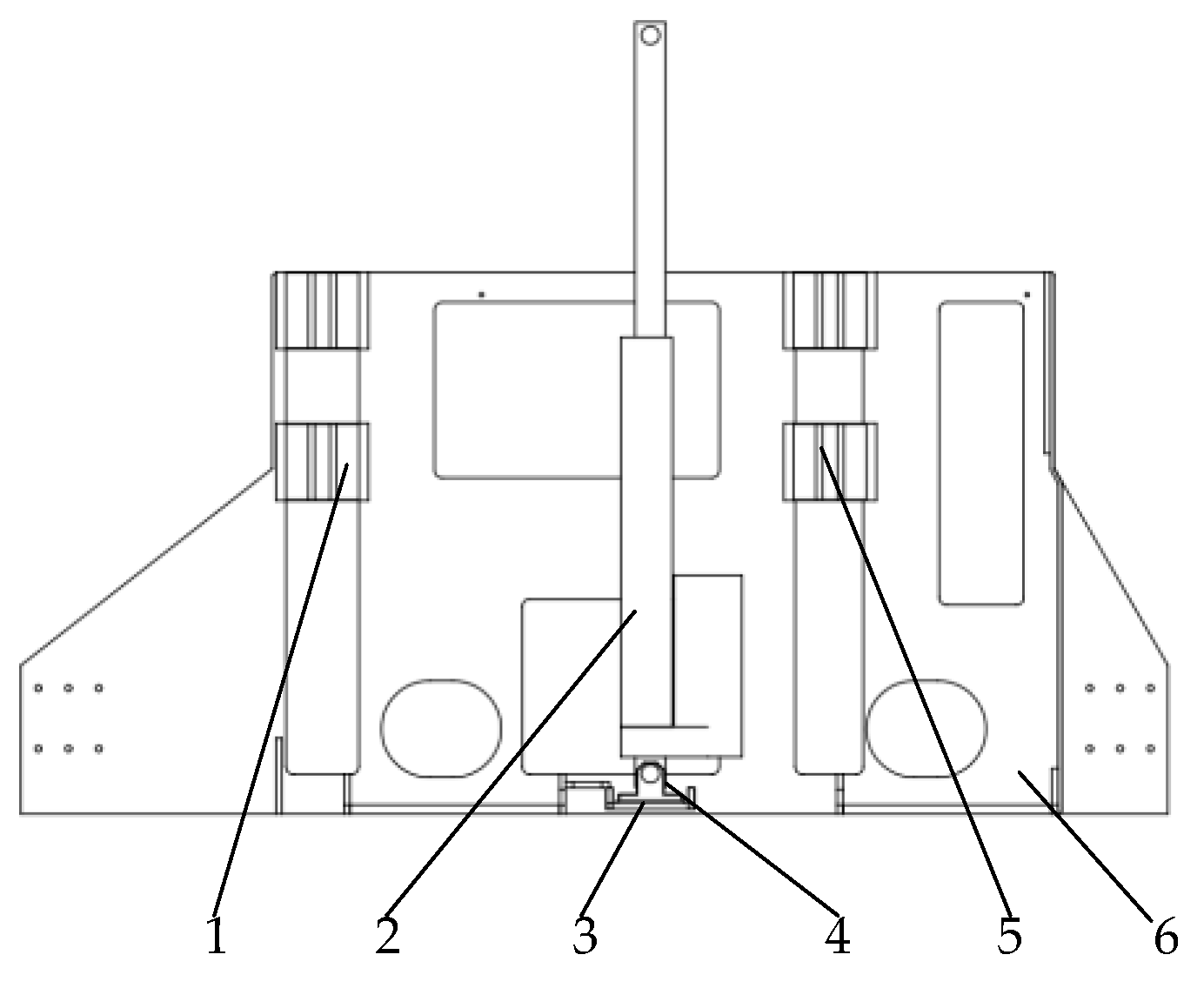
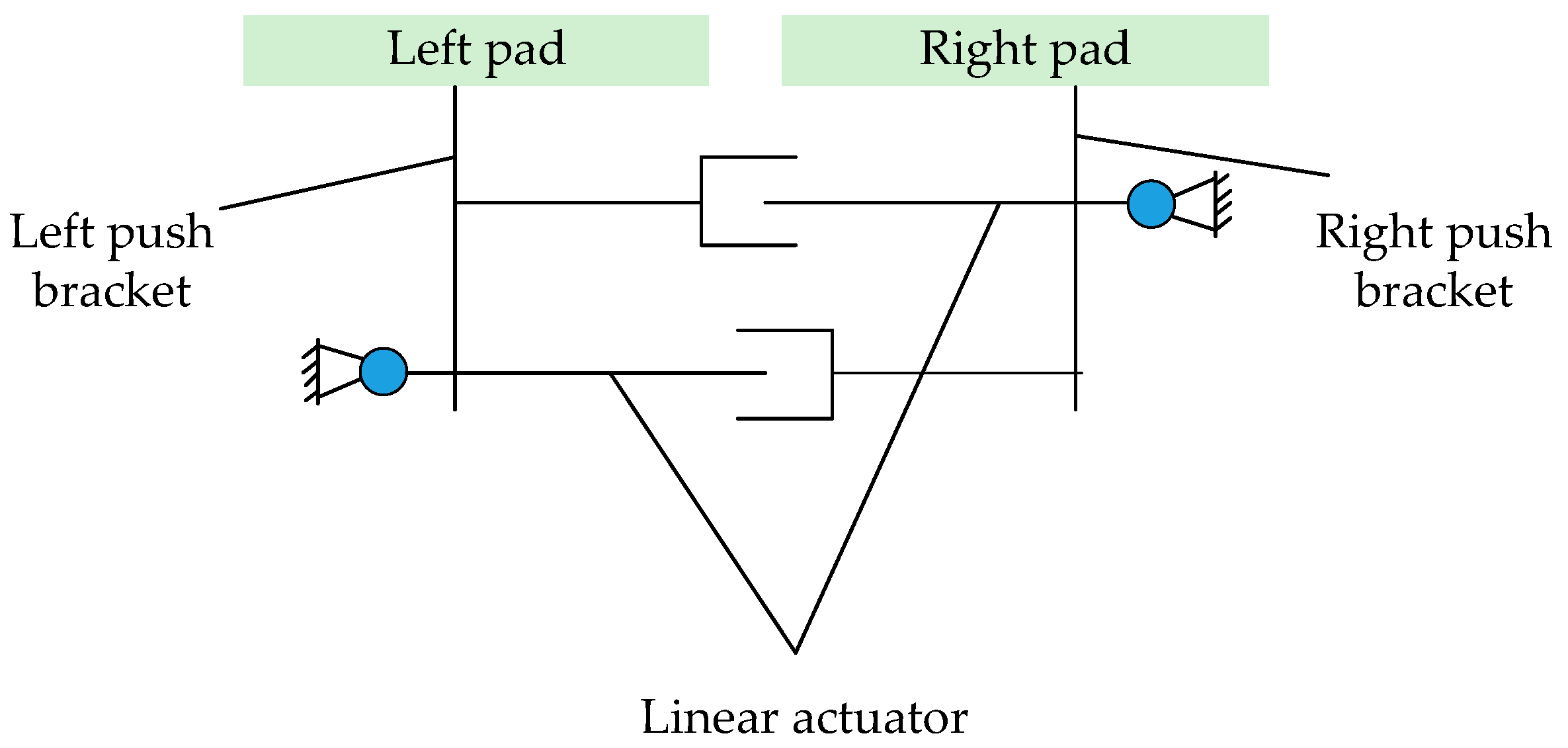
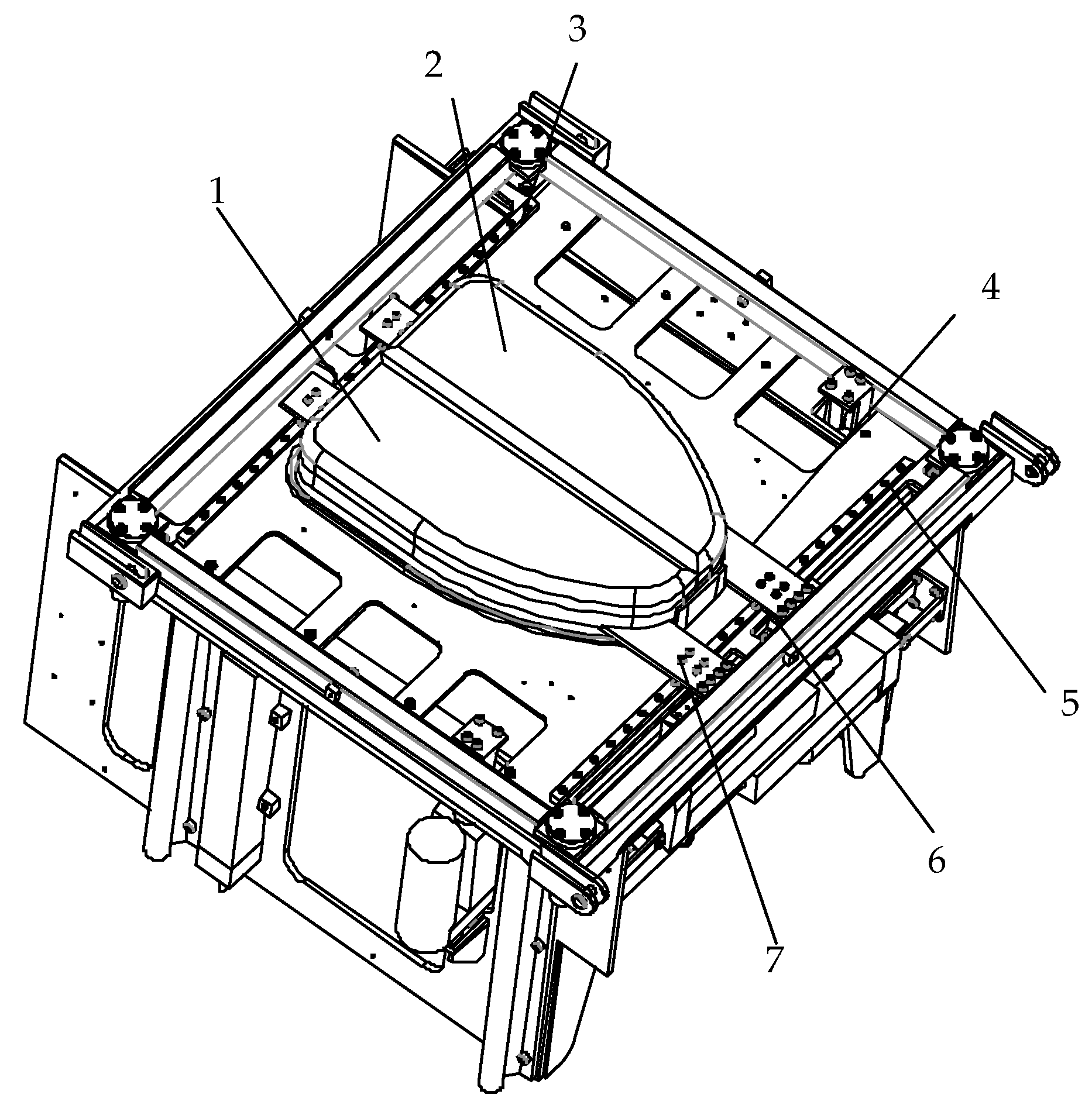
2.3. Design of the Lifting Mehanism and Toilet Mechanism
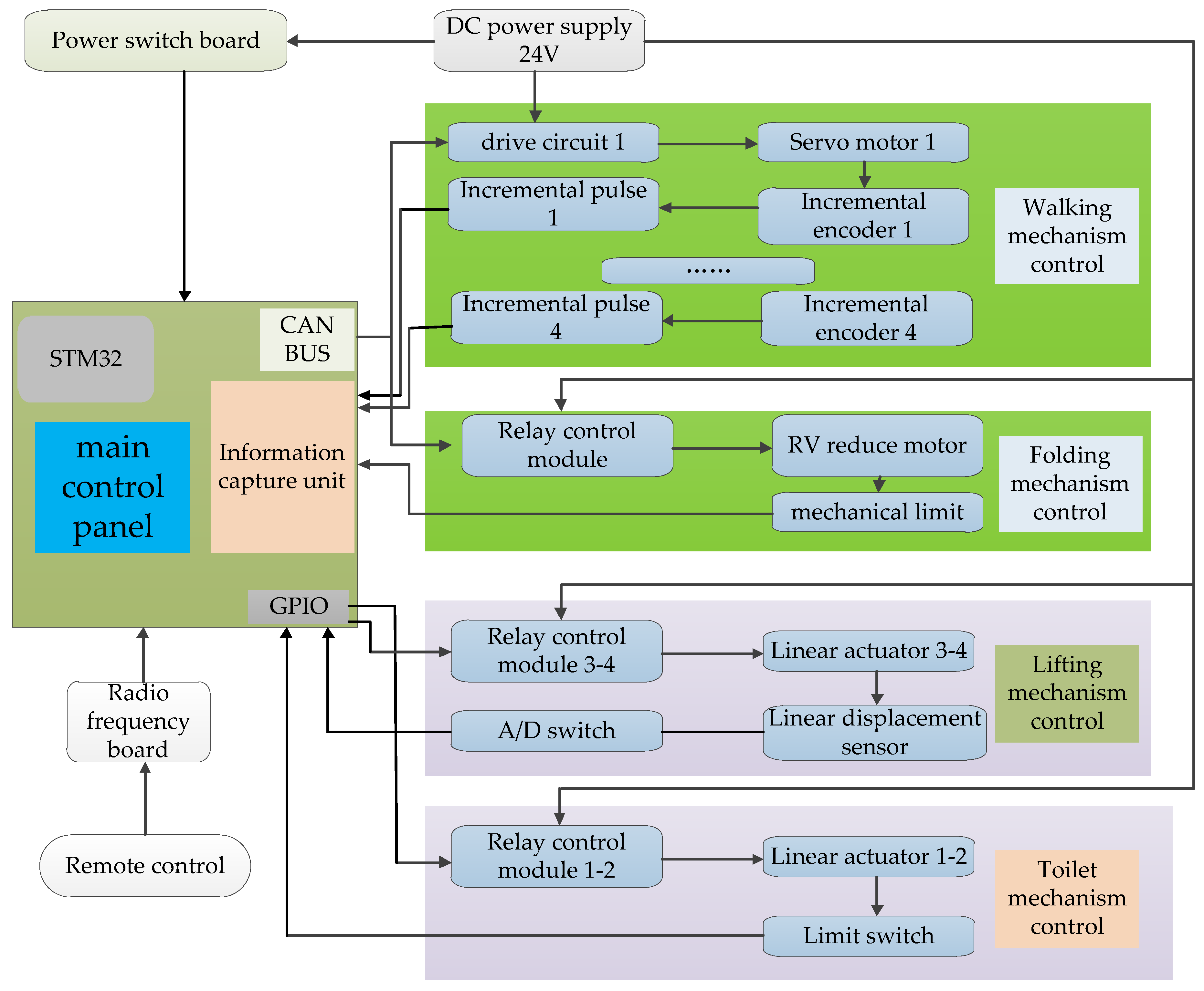
3. Control System Design of the Wheelchair-Stretcher Assistive Robot
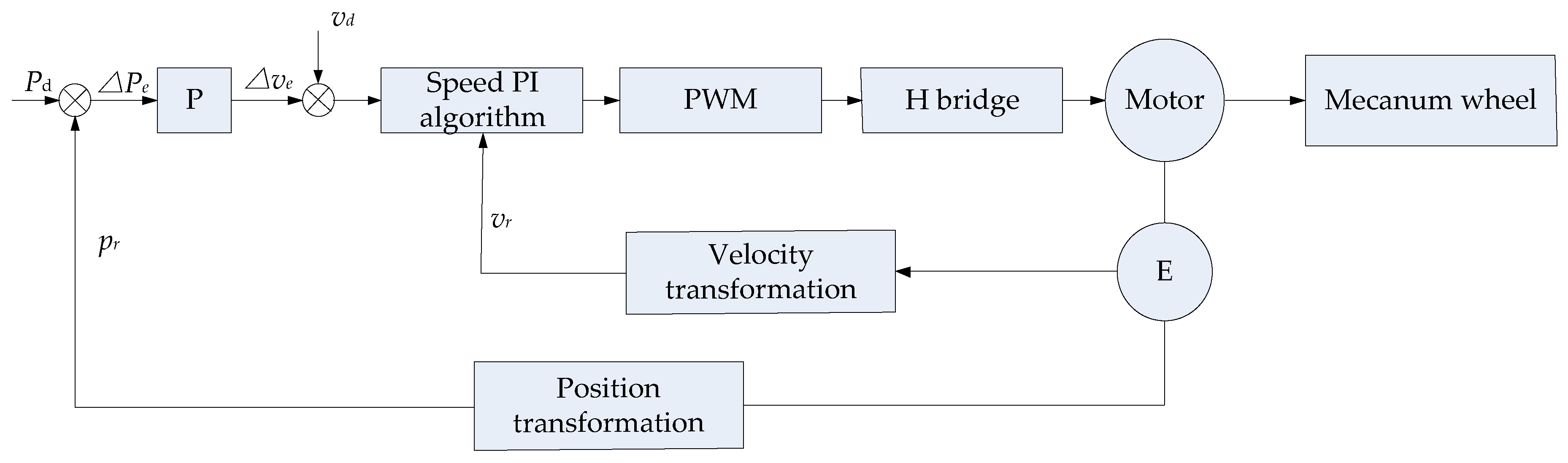
3.1. Control of the Walking Mechanism
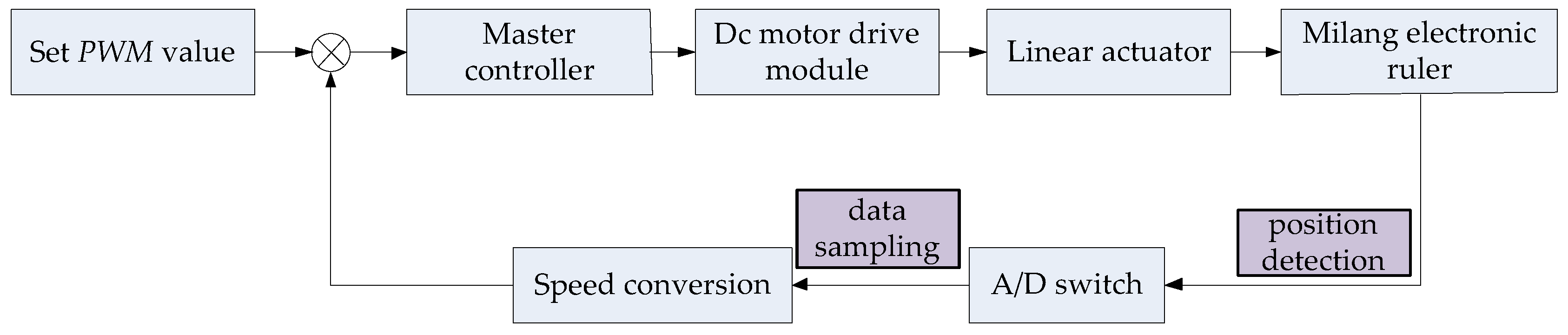
3.2. Control of the Lifting Mechanism
4. Experimental Research of the Wheelchair-Stretch Assistive Robot
4.1. Experimental Research of the Walking Mechanism
- (1)
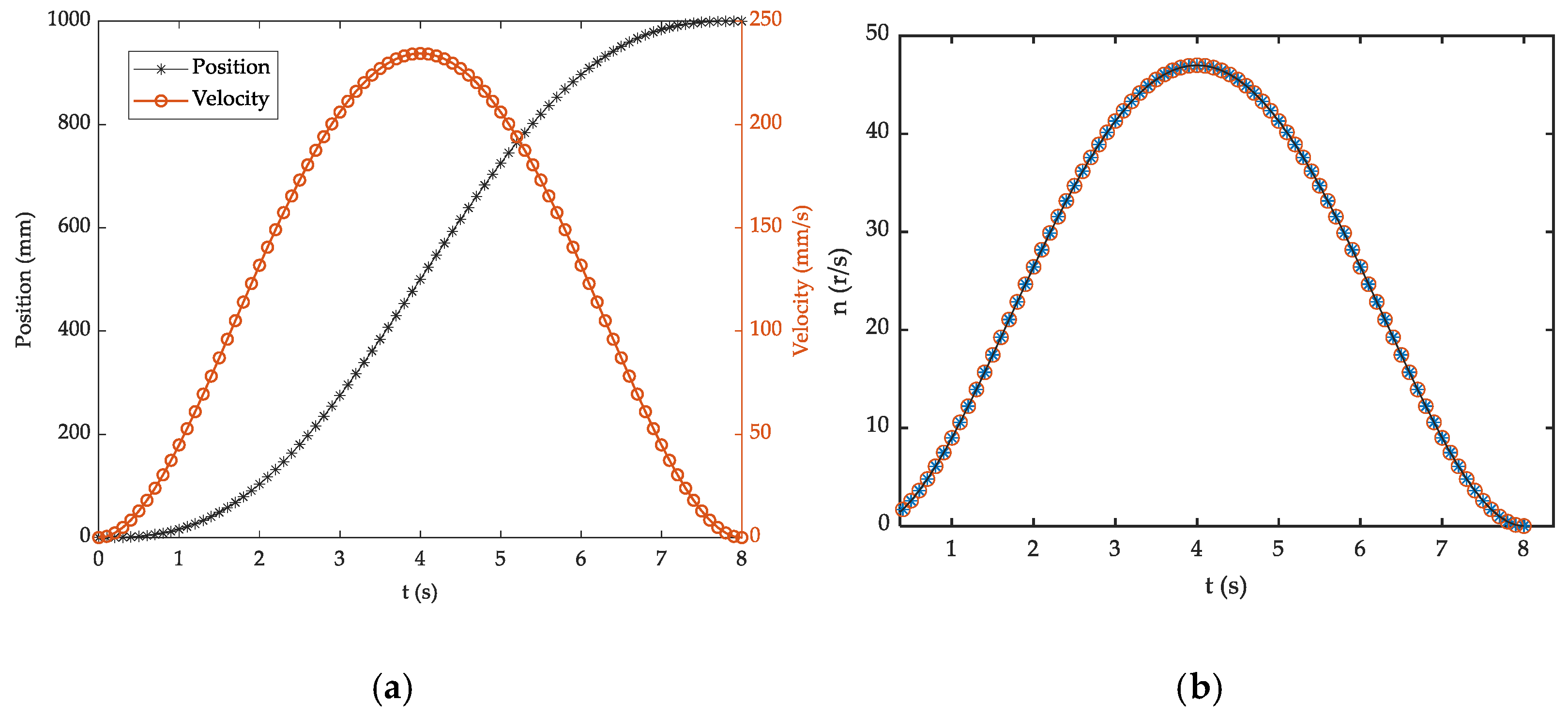
- In the mobile process, the trajectories of the four motors for the mecanusm wheel are the same, which is identical to the theoretical analysis.
- (2)
- The maximum velocity of the motor is less than the rated velocity (4900 r/min ≈ 81.6 r/s) and the motion curve is suitable to the experimental requirements.
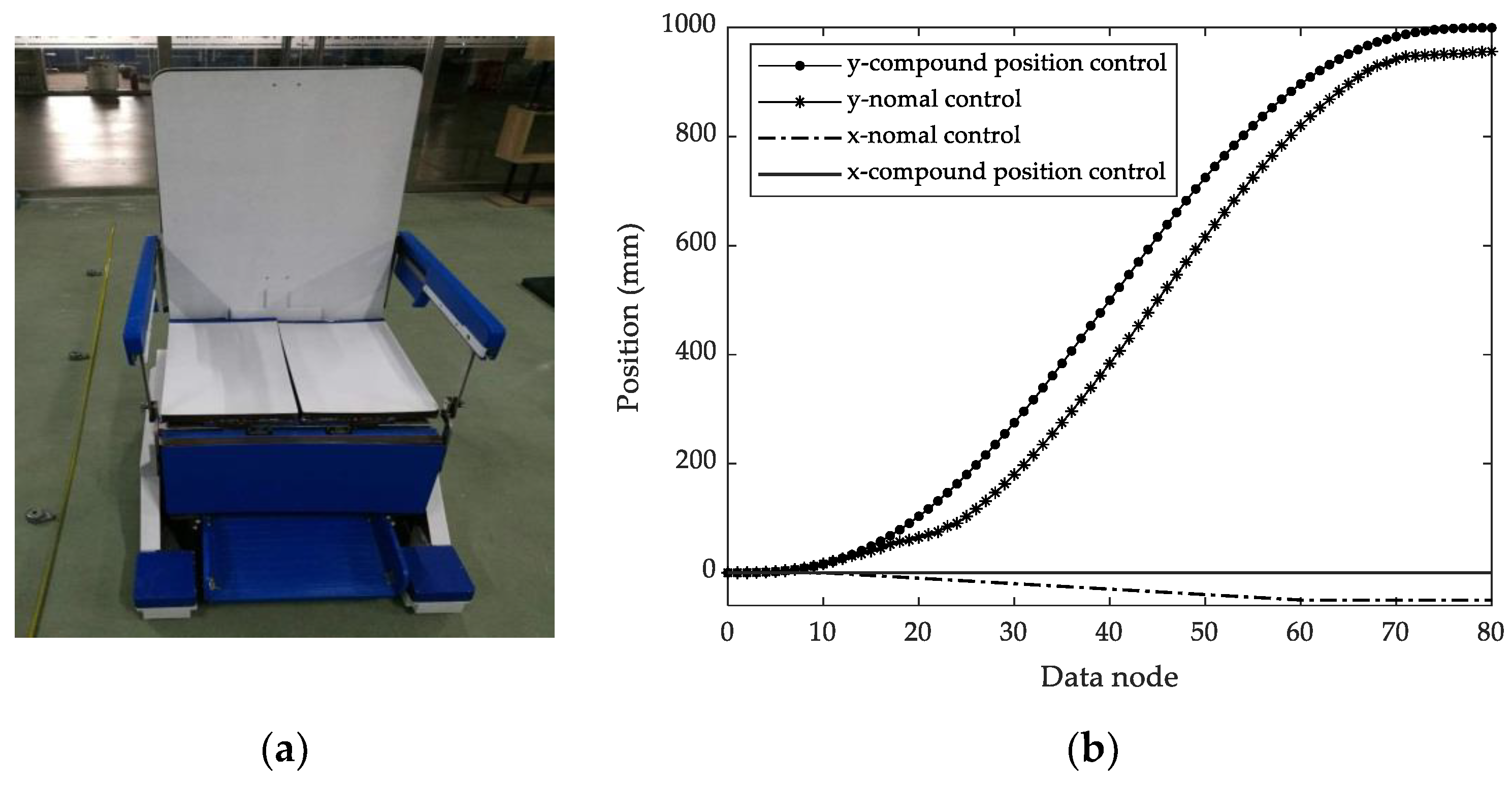
- (1)
- The waveform for the normal position control shows steady-state positioning error not only for the x-axis but also for the y-axis. On the contrary, the compound position control can achieve a successful result in no steady-state error.
- (2)
- In data node 80, the position of the robot for the compound position control is 995.6 mm and there is a 4.4 mm deviation from the theoretical value 1000 mm.
4.2. Experimental Research of the Folding Mechanism
- (1)
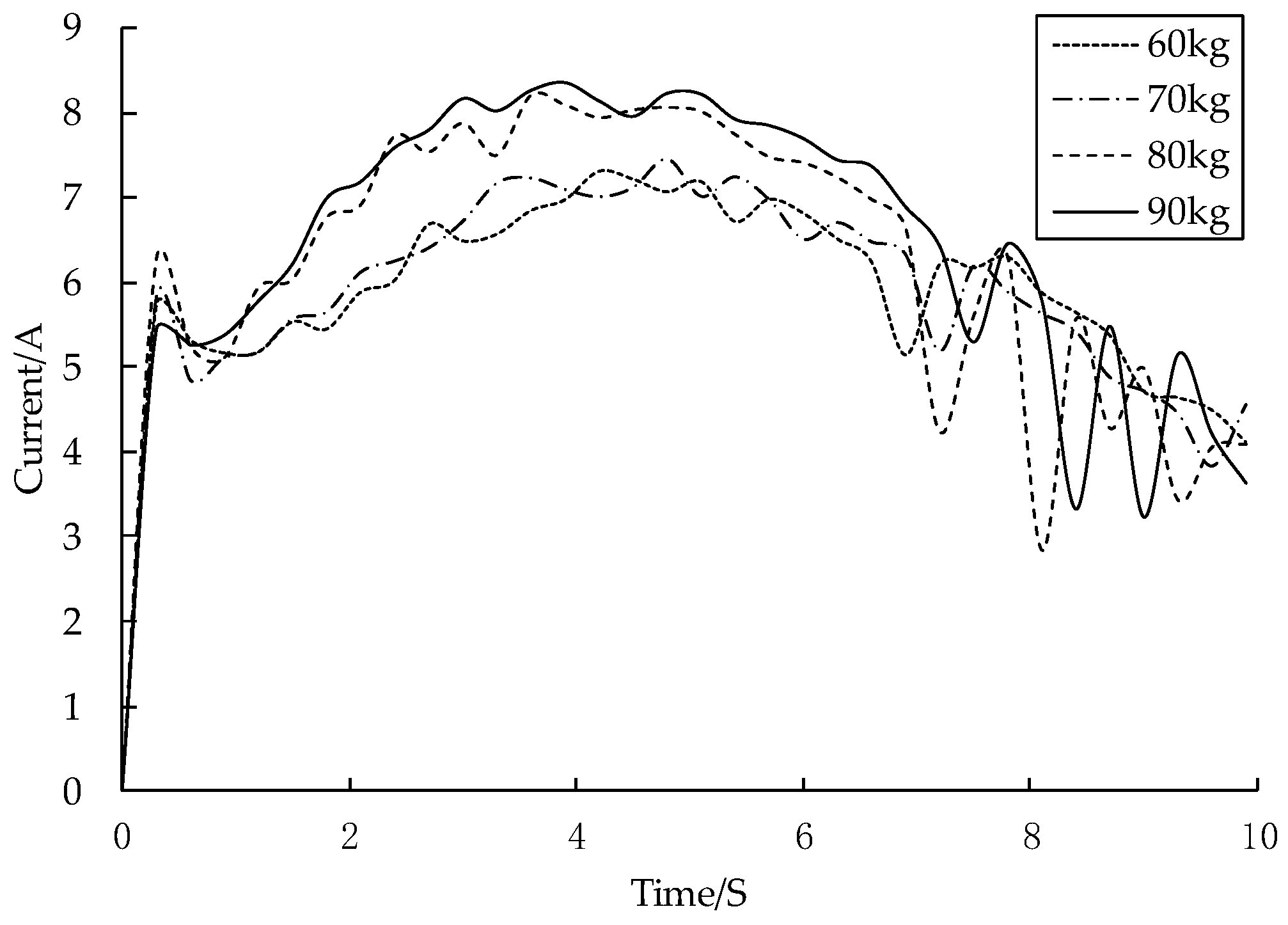
- From the perspective of the curve, it is basically consistent with the variation law of the motor torque curve simulated in Figure 11, which verifies the correctness for the theoretical analysis of the driving device.
- (2)
- The rated current of the motor is 8.3 A. When the tester is 90 kg, the actual maximum current measured is 8.26 A, so the maximum carrying capacity of the whole equipment is 90 kg.
- (3)
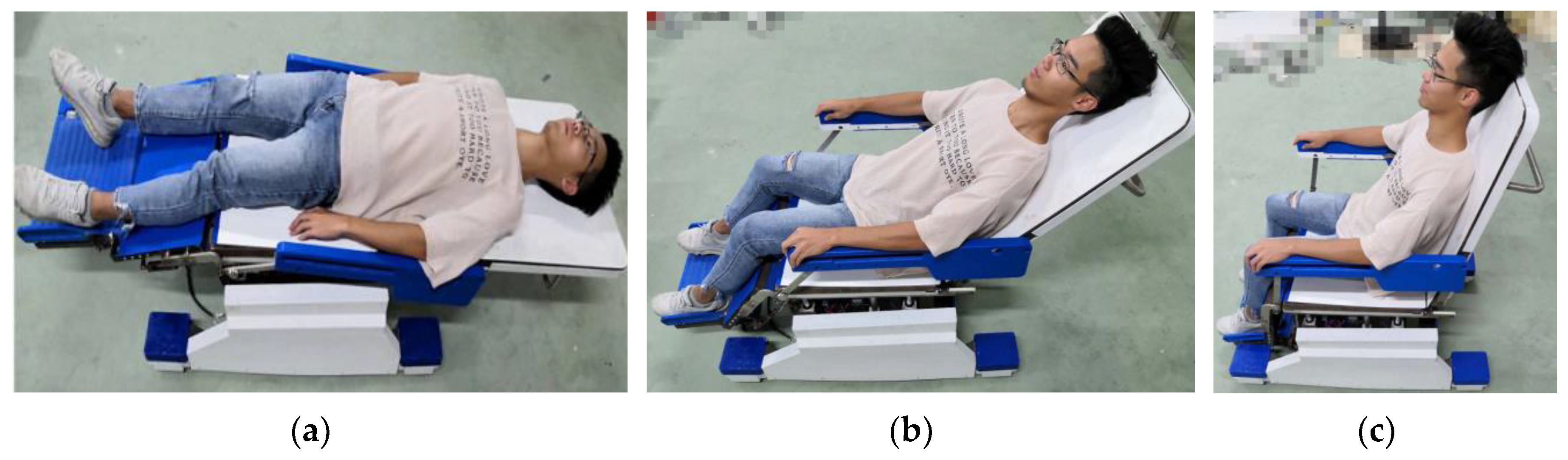
- At the later stage of the movement process, the motion curves fluctuate obviously, because the experimental personnel adjusted their posture, resulting in fluctuations in the force applied on the back. when the back of the wheelchair is folded from a horizontal position to a nearly vertical position, the center of gravity slips relatively during the folding process because the rotation center of the hip joint and the back of the wheelchair do not coincide, which causes the body to lift frequently.
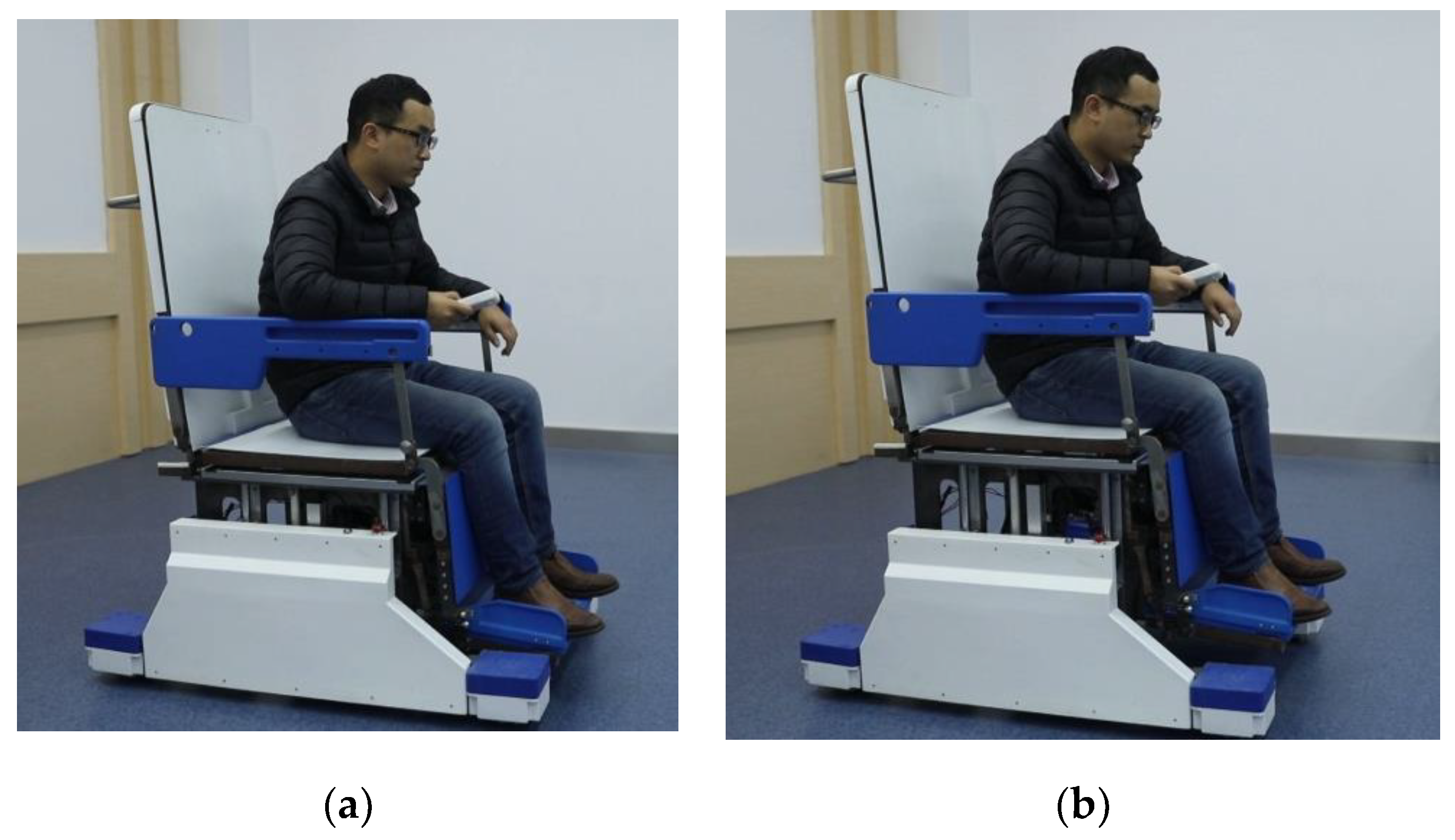
4.3. Experiment Research of the Lifting Mechanism and the Toilet Mechanism
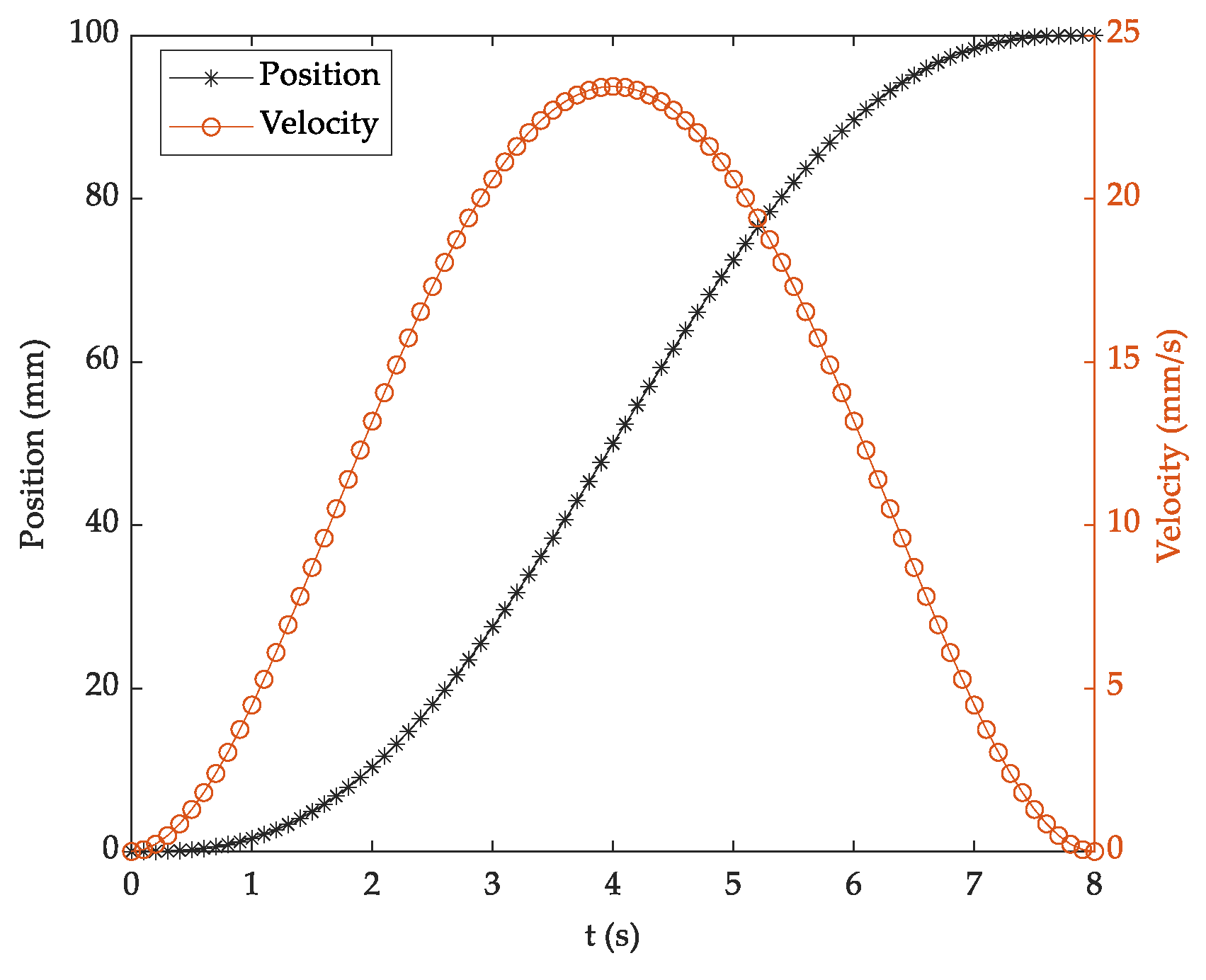
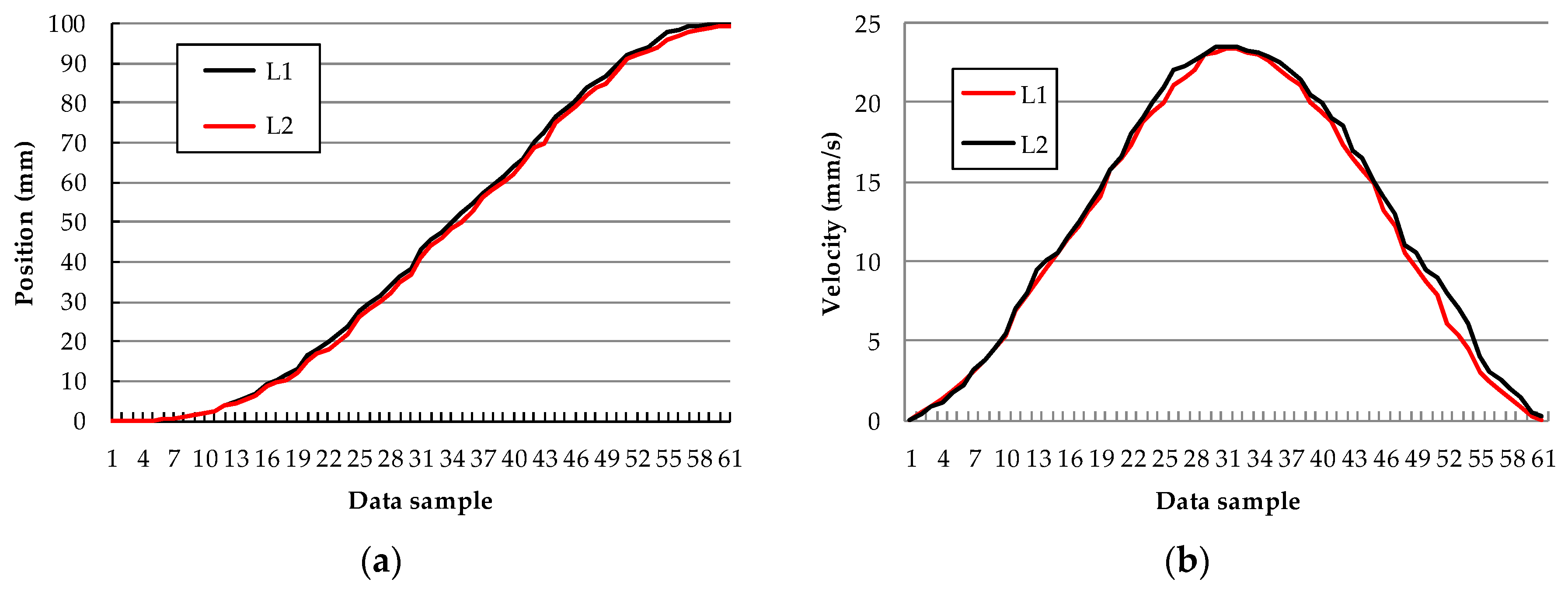
- (1)
- The real position trajectories of the linear actuators L1 and L2 are stable and fluctuation is not obvious. The position close loop control strategy is suitable for the lifting mechanism.
- (2)
- To ensure that the position of the linear actuator L1, the velocity of the linear actuator L2 slightly larger than the velocity of the linear actuator L1.
- (1)
- Excepting for the instantaneous impulse current in the initial stage, the curve of the left and right linear actuators is smooth in the process of moving.
- (2)
- In the opening process of the toilet mechanism, the current increases gradually; in the closing process of the toilet mechanism, the current decreases gradually. The reason for this phenomenon is mainly the lengthening of the force arm of the linear actuator.
- (3)
- Due to machining and assembly errors, the friction force of the slide rail is increased; therefore the current curves of the left and right linear actuators do not coincide with each other in the process of moving.
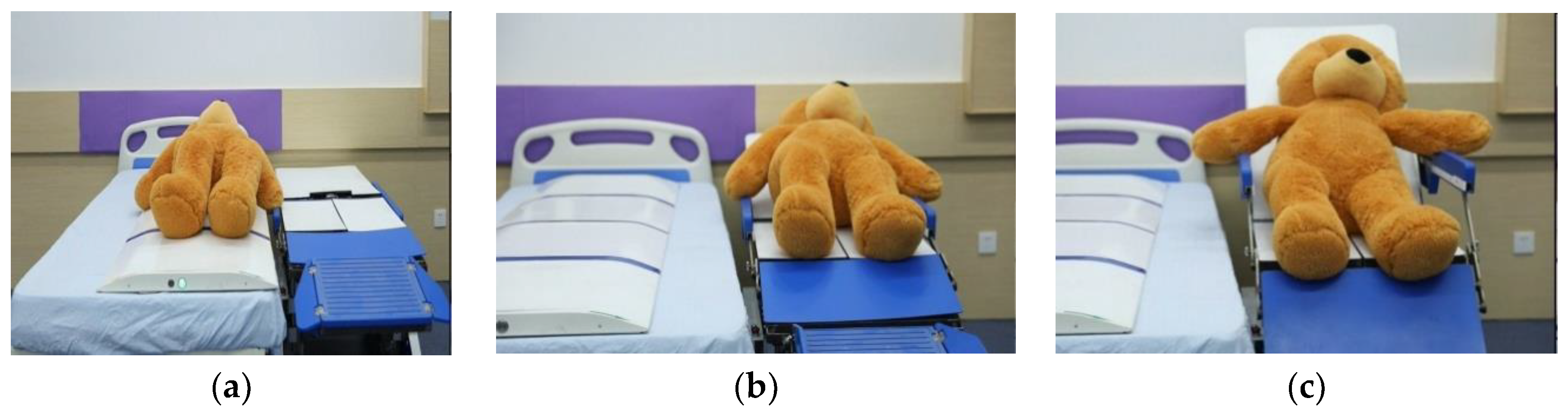
4.4. Experimental Research of Cooperating with Other Equipment
5. Conclusions
- (1)
- The kinematics equation and control equation of the walking mechanism are established, and the correctness of which is determined by theoretical calculation and practical experiment.
- (2)
- A five-link mechanism with single degree of freedom is proposed to realize the folding motion of the robot. The optimal design of the parameters of the mechanism is realized by using the minimum conclusive area method. By studying the force properties of the folding mechanism, the torsion spring and RV reduction motor are used as the driving device, the output torque of the motor is reduced, and the motion optimization and mechanical optimization of the folding mechanism are completed.
- (3)
- Combined with ergonomics, the mechanical structure design of four functional modules is completed. The movement of each module is verified by the experiment research.
- (4)
- Based on the STM32 chip, the control system of the whole prototype is achieved, and the synchronous control algorithm for the control of the lifting mechanism and the compound position control algorithm for the walking mechanism are applied. According to the experimental results, these algorithms can meet the motion requirements. Based on the current, the load capacity of the robot is determined as 90 kg.
Author Contributions
Funding
Conflicts of Interest
References
- United Nations Department of Economic and Social Affairs Population Division. Available online: https://www.un.org/en/development/desa/population/publications/pdf/ageing/WorldPopulationAgeing2019-Highlights.pdf (accessed on 23 October 2019).
- Mohamed, A.N.; Samy, F.A. Development of a 4-DOF cane robot to enhance walking activity of elderly. Proc. Inst. Mech. Eng. Part C J. Mec. 2019. [Google Scholar] [CrossRef]
- Jager, M.; Jordan, C.; Theilmeier, A.; Wortmann, N.; Kuhn, S.; Nienhaus, A.; Luttmann, A. Lumbar-load analysis of manual patient-handling activities for biomechanical overload prevention among healthcare workers. Ann. Occup. Hyg. 2013, 57, 528–544. [Google Scholar] [PubMed] [Green Version]
- Kume, Y.; Tsukada, S.; Kawakami, H. Design and evaluation of rise assisting bed “Resyone®” based on ISO 13482. JRSJ 2015, 33, 781–788. [Google Scholar] [CrossRef] [Green Version]
- Masroor, S.; Bulut, H.; Lin, C.Y. Review on powered mobility and meal preparing assistive devices for physically disabled persons. In Proceedings of the 6th IFToMM International Symposium on Robotics and Mechatronics, Taipei, Taiwan, 28–30 October 2019; Springer: Cham, Switzerland, 2019; pp. 16–28. [Google Scholar]
- Xing, X.D.; Zhou, Q.Y.; Fan, P.Y. A Practical Wheelchair Structure Used for Patients to Go to the Toilet. C.N. Patent CN105012087A, 3 November 2015. (In Chinese). [Google Scholar]
- Chen, D.S.; Fan, Q.L.; Zhao, C.; Wang, T.M. A Multifunctional Nursing Bed with Integrated Bed and Chair. C.N. Patent CN102038588A, 4 May 2011. (In Chinese). [Google Scholar]
- Intelligent Integrated Bed Chair. Available online: https://www.siasun.com/index.php?m=content&c=index&a=show&catid=261&id=669 (accessed on 23 October 2019).
- Duru, S.; Bodingbauer, M. Standards der OP-Patientenlagerung. In Ziel einer einwandfreien Operationslagerung; Duru, S., Gnant, M., Markstaller, K., Bodingbauer, M., Eds.; Springer: Berlin, Germany, 2018; pp. 3–9. [Google Scholar]
- Bartnik, L.M.; Rice, M.S. Comparison of caregiver forces required for sliding a patient up in bed using an array of slide sheets. Workplace Health Saf. 2013, 61, 393–400. [Google Scholar] [CrossRef] [PubMed]
- PowerNurse-the Solution to Your Lateral Transfer Challenges. Available online: https://www.astirtechnologies.com/products/products.html (accessed on 23 October 2019).
- Sang, L.F.; Fu, J.Z.; Gan, Z.X.; Wang, H.; Tian, Y. Design and analysis of folding mechanism for intelligent wheelchair-stretcher robot. J. Zhejiang Univ. Eng. Sci. 2019, 53, 613–620. (In Chinese) [Google Scholar]
- Shi, C.; Tang, S.H.; Duan, X.B.; Ning, B.; Chen, X.; Zhang, X. Development of a transfer arm of the robot for transferring the injuried. Bull. Acad. Mil. Med. Sci. 2010, 34, 55–57. (In Chinese) [Google Scholar]
- Wang, H.B.; Kasagami, F. A patient transfer apparatus between bed and stretcher. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2008, 38, 60–67. [Google Scholar] [CrossRef] [PubMed]
- Mukai, T.; Hirano, S.; Nakashima, H.; Kato, Y.; Sakaida, Y.; Guo, S.; Hosoe, S. Development of a nursing-care assistant robot RIBA that can lift a human in its arms. In Proceedings of the International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 5996–6001. [Google Scholar]
- Noakes, M.W.; Lind, R.F.; Jansen, J.F.; Love, L. Development of a remote trauma care assist robot. In Proceedings of the International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 11–15 October 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 2580–2585. [Google Scholar]
- Liu, J.Y.; Li, S.D.; Chen, M.Q.; Guo, S.J. Visual recognition of human pose for the transfer-care assistant robot. Robot 2019, 41, 601–608. [Google Scholar]
- GB/T 12996-2012. Electrically Powered Wheelchair; China Standards Press: Beijing, China, 2012; pp. 3–12. [Google Scholar]
- IEC 60601. Medical Electrical Equipment; International Electrotechnical Commission: Geneva, Switzerland, 2005; pp. 10–152. [Google Scholar]
- Zhou, M.Y. Ergonomics Application; Shanghai Jiao Tong University: Shanghai, China, 2012; pp. 129–179. [Google Scholar]
- Karwowski, W. Ergonomics and human factors: The paradigms for science, engineering, design, technology and management of human-compatible systems. Ergonomics 2005, 48, 436–463. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Dai, S.; Zheng, Y.; Tian, F.; Yan, X. Modeling and kinematics simulation of a mecanum wheel platform in RecurDyn. J. Robot. 2018, 2018, 1–7. [Google Scholar] [CrossRef]
- Lee, C.H.; Lee, K.M.; Yoo, J.; Kim, I.; Bang, Y. A compact stair-climbing wheelchair with two 3-DOF legs and a 1-DOF base. Ind. Rob. 2016, 43, 181–192. [Google Scholar] [CrossRef]
- Zhou, F.; Xu, X.; Xu, H.; Zou, T.; Zhang, L. Transition mechanism design of a hybrid wheel-track-leg based on foldable rims. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 223, 4788–4801. [Google Scholar] [CrossRef] [Green Version]
- Ren, M.; Fan, Q.; Ning, M.; Zhang, L. Mechanism design of a robotic chair/bed system for bedridden aged. Adv. Mech. Eng. 2017, 9, 1–8. [Google Scholar]
- Wang, H.; Sang, L.; Hu, X.; Zhang, D.; Yu, H. Kinematics and Dynamics Analysis of a Quadruped Walking Robot with Parallel Leg Mechanism. Chin. J. Mech. Eng. 2013, 26, 881–891. [Google Scholar] [CrossRef]
- Song, Y.; Shi, Z.; Tang, Z.; Ye, F.; Sun, S. Kinematics model and simulation for motor of four-link electric chair. J. Mech. Eng. 2015, 51, 47–52. (In Chinese) [Google Scholar] [CrossRef]
- Wang, J.; Guan, S.; Xia, Q. Structural design of finger rehabilitation exoskeleton robots. China Mech. Eng. 2018, 29, 224–229. (In Chinese) [Google Scholar]
- Li, B.; Lu, B.C. Research on methods for determining sizes of quadric crank mechanism of plane. J. Wuhan Transp. Univ. 1999, 23, 84–88. (In Chinese) [Google Scholar]
- Ding, Y.L. Ergonomics, 4th ed.; Beijing Institute of Technology Press: Beijing, China, 2011; pp. 35–155. [Google Scholar]
- GB 10000-1988. Chinese Adult Body Size; China Standards Press: Beijing, China, 1988; pp. 50–90. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage/V | Reducer | Rated Torque/(N∙m) | Rated Power/W | Rated Revolution/(r·min−1) |
|---|---|---|---|---|
| 24 | 1/862 | 48 | 200 W | 2 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| The velocity of the motor | 4900 r/min | Reduction ratio for reducer | 1:80 |
| Radius R of the mecanum wheel | 63.5 mm | Bias angle α | 45° |
| m1 | 272 mm | m2 | 451.5 mm |
| Name | Voltage | Range | Maximum Velocity | Resolution Ratio | Output Type |
|---|---|---|---|---|---|
| Milang electronic ruler | 12~24 V | 0~300 mm | 10 m/s | 0.01 mm | 0~5 V |
| Linear actuator | 24 V | 0~300 mm | 25 mm/s | --- | --- |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sang, L.; Yamamura, M.; Dong, F.; Gan, Z.; Fu, J.; Wang, H.; Tian, Y. Analysis, Design, and Experimental Research of a Novel Wheelchair-Stretcher Assistive Robot. Appl. Sci. 2020, 10, 264. https://doi.org/10.3390/app10010264
Sang L, Yamamura M, Dong F, Gan Z, Fu J, Wang H, Tian Y. Analysis, Design, and Experimental Research of a Novel Wheelchair-Stretcher Assistive Robot. Applied Sciences. 2020; 10(1):264. https://doi.org/10.3390/app10010264
Chicago/Turabian StyleSang, Lingfeng, Masayuki Yamamura, Fangyan Dong, Zhongxue Gan, Jianzhong Fu, Hongbo Wang, and Yu Tian. 2020. "Analysis, Design, and Experimental Research of a Novel Wheelchair-Stretcher Assistive Robot" Applied Sciences 10, no. 1: 264. https://doi.org/10.3390/app10010264