1. Introduction
Delamination is one of the most common defects found in fiber-reinforced composite laminates due to their weak transverse tensile and inter-laminar shear strengths [
1]. Such defects may be caused by an impact and tend to develop internally between the neighboring fiber layers of the laminate. This results in loss of the strength of the structure without any visual evidence. As a result, sophisticated non-destructive testing and signal processing techniques are of great significance for the structural integrity assessment of fiber reinforced laminates. Ultrasonic guided wave structural health monitoring (SHM) emerged as one of the most powerful tools which uses a network of embedded sensors to detect and continuously track the development of such defects in various industrial fields [
2]. SHM systems usually employ ultrasonic guided waves which propagate in elongated thin-walled structures, possess low attenuation and are sensitive to the integral elastic properties of the material; thus, they can be used to infer large structures with only a few coupled transducers. Numerous researches have targeted non-linear, multimodal behavior, scattering and energy leakage of guided waves for the detection and sizing of delamination-type defects [
3,
4,
5,
6,
7].
By interaction of guided waves with delamination, waves are scattered and converted to other modes [
8]. The mechanism of wave scattering depends on the type of the guided wave mode as well as on the depth and size of the defect. Various investigations have demonstrated that A
0 and S
0 modes of guided waves propagate in the two regions divided by the delamination individually and then interact with each other after exiting the defect [
9,
10]. The anti-symmetric modes are found to be more suitable for the assessment of delaminations as they show higher sensitivity to delamination located at different through-thickness positions compared to the symmetric mode [
11]. A few studies on A
0 mode interaction with asymmetrical and symmetrical delaminations in laminated composites were presented by Ramadas et al. [
12,
13]. It was found that, in the case of symmetrical delamination, incident A
0 mode and converted A
0 (A
0›S
0›A
0) mode propagate after the exit of delamination. In the case of an asymmetrical defect, an additional S
0 mode (A
0›S
0›S
0) appears upon the interaction with the defect. The authors also proposed the method for the assessment of the delamination size based on the time-of-flight measurement of A
0 mode [
14]. However, such a method appeared to be valid at low dispersion regions of A
0 mode as the velocities in the upper and lower sub-laminate layer of the defect were assumed to be equal to the velocity in the entire structure. In case of sub-surface delaminations, the velocities in sub-laminates can be essentially different, which leads to high errors.
Lamb wave scattering and conversion at the leading and trailing edge of delamination is another topic which has been extensively studied by numerous research groups. For example, Schaal et al. [
15] estimated frequency-dependent scattering coefficients for fundamental Lamb wave modes separately at the leading and trailing edges of delamination. Hu et al. [
16] developed a technique to locate the delamination-type defects by using two embedded transducers and an S
0 mode by measuring signals reflected from the tip of the defect. A study on S
0 mode interaction with the delamination-type defect was presented, which showed that, at each end of delamination, the transmitted and reflected A
0/S
0 modes are being generated with each mode having different reflection and transmission coefficients depending on the local bending stiffness of the structure. An extensive study on Lamb wave mode conversion in a 2D plate containing a finite length delamination parallel with the surface was presented by Shkerdin and Glorieux [
17]. Mode conversions between Lamb wave modes and between Rayleigh wave and Lamb modes were analyzed. It was found that the transmission coefficients of Lamb waves are both defect length- and depth-dependent, and they vary for different transmitted modes. Birt et al. [
18] studied the dependencies between the magnitude of the reflected S
0 mode and the width of delamination.
As a result of such complex scattering and mode conversion, various linear acoustic tools for the detection and localization of delamination-type defects can be developed. For example, by measuring the time-of-flight (ToF) of the reflected and transmitted waves, the existence and location of delamination can be estimated [
8,
19]. Additionally, by analyzing the ToF and velocities of the modes propagating at the layers divided by delamination, the length of the defect can be assessed [
20,
21]. However, the success of the above-mentioned methods is strongly influenced by the dispersion and superposition of the modes of guided waves. The defects are mostly weak reflectors, while the monitoring system tends to detect and locate them in a large structure by using a small number of sensors. This leads to a low signal-to-noise ratio (SNR), which further complicates the signal analysis and the estimation of the time of flight (ToF).
Most of the researches in the field of linear acoustics are currently targeting the detection, localization and sizing of delamination-type defects. However, the assessment of the depth of a defect is no less important for the evaluation of defect severity. There are only a few works available which discuss the depth estimation of a delamination-type defect. Recently, Eremin et al. [
22] analyzed the relationship between the length and depth of delamination with the scattering resonance frequencies of delamination. Munian et al. [
23] analyzed the reflection of A
0 mode as a function of the depth-wise position of delamination. It was concluded that mid-plane delamination scatters less energy of the asymmetric mode, meanwhile, off mid-plane delaminations additionally introduce a reflection of converted S
0 mode. Gupta et al. [
24] exploited S
0 mode to analyze its reflection from delamination situated at different depths and ply layups. Reflection coefficients as a function of the through-thickness location of delamination were estimated for various ply layups, which showed the importance of the defect position and the composition of the material to the detectability of delamination. Recently, Murat et al. [
25,
26] analyzed the scattering of A
0 mode from delaminations of different sizes which were situated at different depths. It was observed that the delamination length exerts strong influence on the scattering directivity, while its depth influences the magnitude of the scattered wave. Despite some promising results, the abovementioned works in general have discussed the fundamental influence of the defect depth on the scattering of guided wave modes. There is still a lack of methods to extract the depth of the defect without any initial knowledge about its through-thickness location when dispersion is involved.
This paper proposes the SHM method to extract the absolute depth and size of asymmetrical delamination-type defects in plate-like structures with parallel surfaces. The technique proposed in this study extracts the depth of the damage by analyzing the amplitude variation patterns of direct A0 mode at different excitation frequencies. These magnitude variations are caused by the difference of wave velocities in the upper and lower sub-laminates due to their uneven thicknesses. This leads to the varying phase differences of the wave-packets at the trailing edge of the defect and results in an altering forward scattered amplitude of the direct A0 mode. Hence, in comparison with the predefined reference dependencies, the absolute values of the delamination depth can be extracted. Such magnitude variation is related to the excitation frequency as the phase velocity of A0 mode is frequency and thickness dependent. As a result, different magnitude variation patterns at different excitation frequencies can be observed. Having such patterns at different frequencies allow to increase the accuracy of damage depth estimation. This is very important in the presence of strong dispersion, as the rapid changes in velocity of guided wave modes can introduce large errors. Furthermore, the information on the damage depth can be exploited for the assessment of the defect length as the actual depth of the defect determines the phase velocities of A0 and S0 modes in the upper and lower sub-laminates. Then, the delamination size can be evaluated by measuring the ToF between the wave packets of the converted and direct A0 modes. Hence, the approach proposed in this research can provide information about the absolute depth and the length of the damage employing a few time traces measured at a series of different excitation frequencies. The technique proposed in this study is essentially different from the currently existing ones as it uses multiple excitation frequencies, which leads to different patterns of A0 mode magnitude variation and, subsequently, to better resolution. Most of the available research studies use constant a-priori wave velocities for damage size estimation which is not valid in the presence of dispersion. The technique proposed in this paper can be used even in the presence of the dispersion of A0 mode as it exploits the dependency of the phase velocity on the thickness of the layers above and below the defect.
This paper focuses on the proof of the concept of the proposed delamination depth and length estimation method by analyzing a single delamination-type defect. However, in further studies, it is expected to extend the presented method to extract features of multiple parallel delaminations which are a common outcome of low velocity impact damage.
2. Method for Assessment of Delamination Parameters
2.1. Interaction of A0 Mode with Delamination-Type Defect
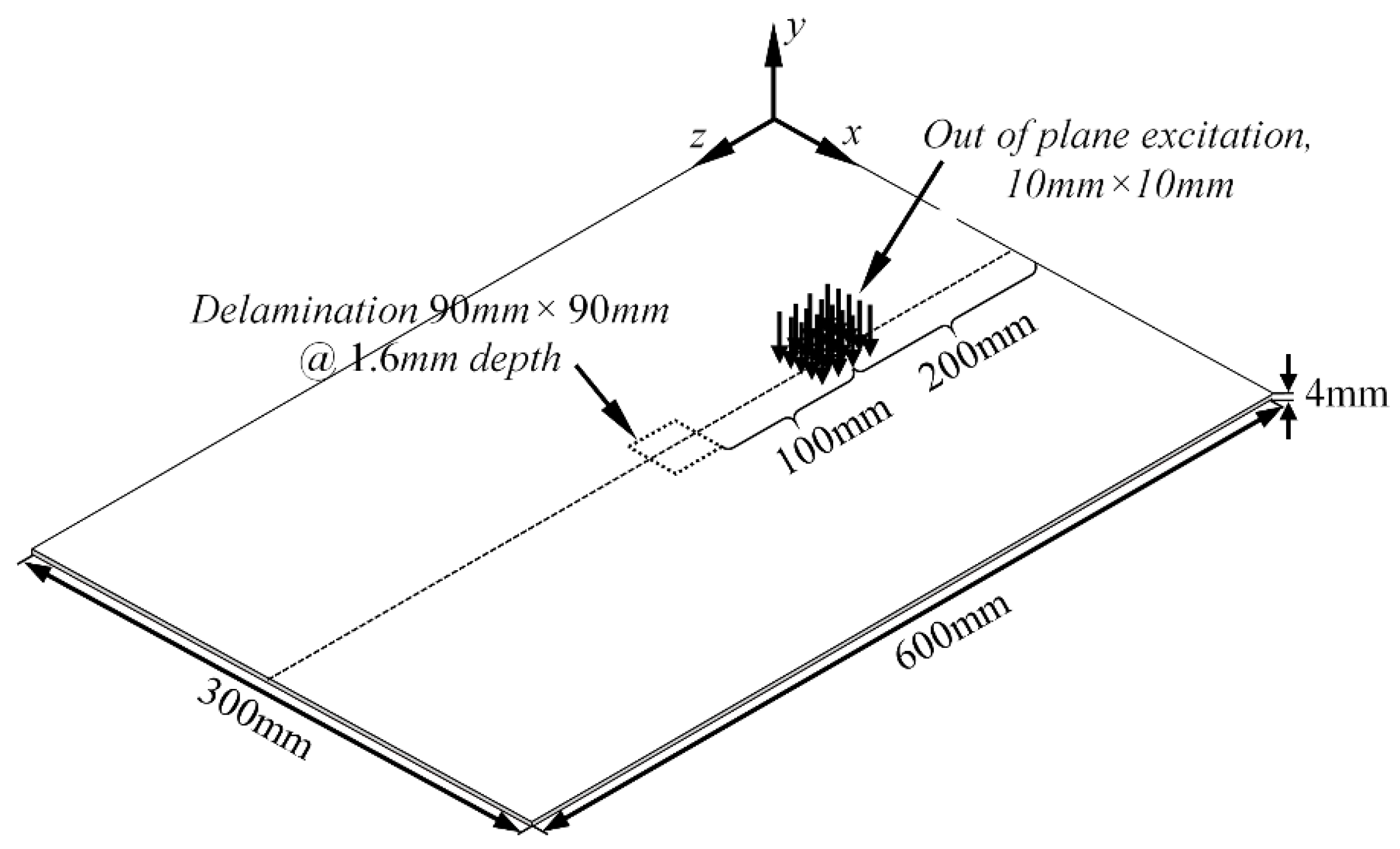
Let us analyze a composite plate with length l and thickness h which is shown in
Figure 1. It will be investigated with the 2D approach, which means that the plate is infinite along the
y axis. Let us consider that the delamination-type defect is present in the structure, which is
l1 long and situated at distances of
l0 and
l2 from the source (excitation) and monitoring (reception) points, respectively, at a depth of
h1 with respect to the top surface. The delamination is parallel to the surface of the sample (
Figure 1).
The fundamental A
0 mode has been selected in this paper. As multiple guided wave modes are being generated simultaneously, different strategies exist to excite isolated modes, such as angle beam excitation [
27], element width selection [
28], inter-element spacing or interdigital transducers [
29,
30], in-phase and out-of-phase excitation [
31], etc. In this research the fundamental dispersion zone has been selected and the excitation frequencies were limited from 50 kHz up to 200 kHz. At such frequencies, the wavelengths of A
0 mode varies from 17.2 mm (at 50 kHz), to 5.6 mm (at 200 kHz) at 4 mm GFRP plate (
Ex = 10 GPa,
Ez = 35.7 GPa;
υxz = 0.325,
υzx = 0.091,
υyx = 0.35;
Gxz = 2.8 GPa;
ρ = 1800 kg/m
3). This shows that both A
0, S
0 and higher order A
1 and S
1 modes can exist at such a constant wavelength (see
Figure 2a). However, using a Plexiglas wedge (2700 m/s) as a coupling medium and normal incidence angles, the fundamental A
0 mode is being generated most effectively (see
Figure 2b), and sophisticated mode isolation techniques were not applied.
The signal of A
0 mode excited at the source point and measured at the monitoring point after propagation through the delaminated area will be the subject of all the upcoming investigations. Upon the interaction of A
0 mode with the delamination-type defect, the reflection, transmission and mode conversion occur at each end of the damage. In such a way, at the leading edge of the damage, the incident A
0 mode reflects back, and in the forward direction it splits into wave packets which accordingly propagate on the sub-laminates above and below the defect. Moreover, mode conversion occurs at the leading edge; therefore, part of the energy transforms into S
0 mode as well (see
Figure 3a). Similarly, at the trailing edge of the damage, both A
0 and S
0 modes are reflecting back, propagating forward and converting to each other (see
Figure 3b). This representation does not take into account the scattering coefficients of each reflected/converted mode.
In this research, only the forward scattered wave-packets of A
0 mode will be considered; they are squared red in
Figure 3b. Mathematically, the spectrum of the signal of A
0 mode
UIA0(
f) which arrives first to the monitoring (reception) point can be expressed as:
where
UsA0(
f) is the frequency spectrum of the excitation signal of A
0 mode;
H(
f,
cp,
l) is the transfer function of the waves propagating in the corresponding layer;
cpA0(
f),
cpS0(
f) are the phase velocities of A
0 and S
0 modes, respectively;
l is the propagation distance (
l0,
l2–propagation distances in the defect-free area before and after the defect, respectively,
l1–length of the defect);
L is the separation between the source and the monitoring points (
L =
l0 +
l1 +
l2); and α(
f) is the frequency dependent attenuation function;
kT01A,
kT02A,
kT10S and
kT20S are the transmission coefficients for A
0 and S
0 modes at the leading and trailing edges of the delamination, respectively, for the layer above and below the defect. The estimation of such reflection and transmission coefficients was out of the scope of this study. They essentially depend on the guided wave mode, the delamination depth, the material properties and the total thickness of the plate, and they should be determined for each particular case separately.
The wave packet described by Equation (1) is A
0 mode, which is a superposition of the signals traveling at upper and lower sub-laminates. This wave-packet converts from A
0 mode to S
0 mode at the leading edge and back to A
0 at the trailing edge of the defect. Due to this reason, this wave packet
UIA0(
f) arrives earlier compared to the direct transmission of A
0 mode which does not convert within the defected area. This happens due to the reason that S
0 mode possesses a greater group velocity at low frequencies compared to A
0 mode. In this research, such a wave-packet shall be referred to as “first A
0 arrival”. Consequently, the frequency spectrum of the direct transmission of A
0 mode can be written as:
The “direct A0 transmission” described by Equation (3) is the wave-packet which does not convert to other modes at the leading and trailing edges of delamination.
The scattering of the incident A
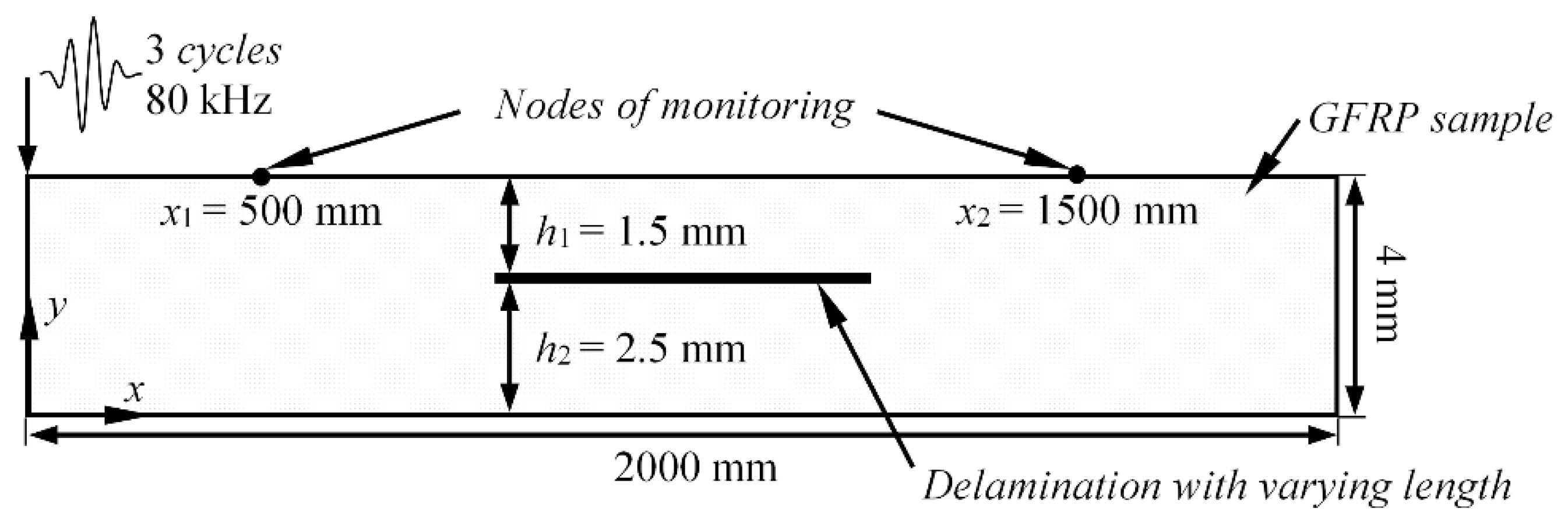
0 mode at the delamination-type defect is further illustrated with B-scans in
Figure 4 which were simulated by using the Finite Element plane-strain model on a 2000 mm × 4 mm 2D GFRP plate. These B-scans represent a centered delamination-type defect located at a depth of 1.5 mm with respect to the top surface of the sample. A
0 mode was excited with a Gaussian envelope tone burst of three cycles and a central frequency of 80 kHz. The signals which are analyzed in this paper are denoted as
uIIA0(
t) (“direct A
0 transmission”) and
uIA0(
t) (“first A
0 arrival”) in
Figure 4.
2.2. Method to Estimate the Depth of Defect
As it was shown by Equation (3), the “direct A
0 transmission” is a superposition of the waves traveling at the sub-laminates below and above the damage which does not convert to other modes, neither at the leading, nor at the trailing edge of the defect. If the delamination is asymmetrical across the thickness of the laminate (
h1 ≠
h2 in
Figure 1), the phase velocities at sub-laminates are different (
cp1 ≠
cp2), and they depend on the excitation frequency and thickness of each sub-laminate. Beyond the defect, the modes from the upper and lower sub-laminates interfere with each other, which results in the single forward scattered A
0 mode
uIIA0(
t). The magnitude of this mode is proportional to the result of interference which can be either in phase, out of phase or intermediate. If the transducer is driven by a set of different frequencies, a collection of magnitude variation patterns can be obtained and used for damage depth extraction. The use of multiple excitation frequencies enables one to exploit the frequency dependent phase velocity of A
0 mode, especially in the case of the presence of dispersion. Thus, the idea of the proposed method to estimate the depth of damage relies on the magnitude measurements of “direct A
0 transmission”
uIIA0(
t) at burst signals with different central frequencies (
f1,
f2, …
fn). We should note that this technique is only valid if the delamination is asymmetrical
h1 ≠
h/2 ≠
h2 and
cp1 ≠
cp2. For ideally symmetrical delamination, there will be no out-of-phase interference of A
0 mode as the velocities at the layer above and below the defect will be very close.
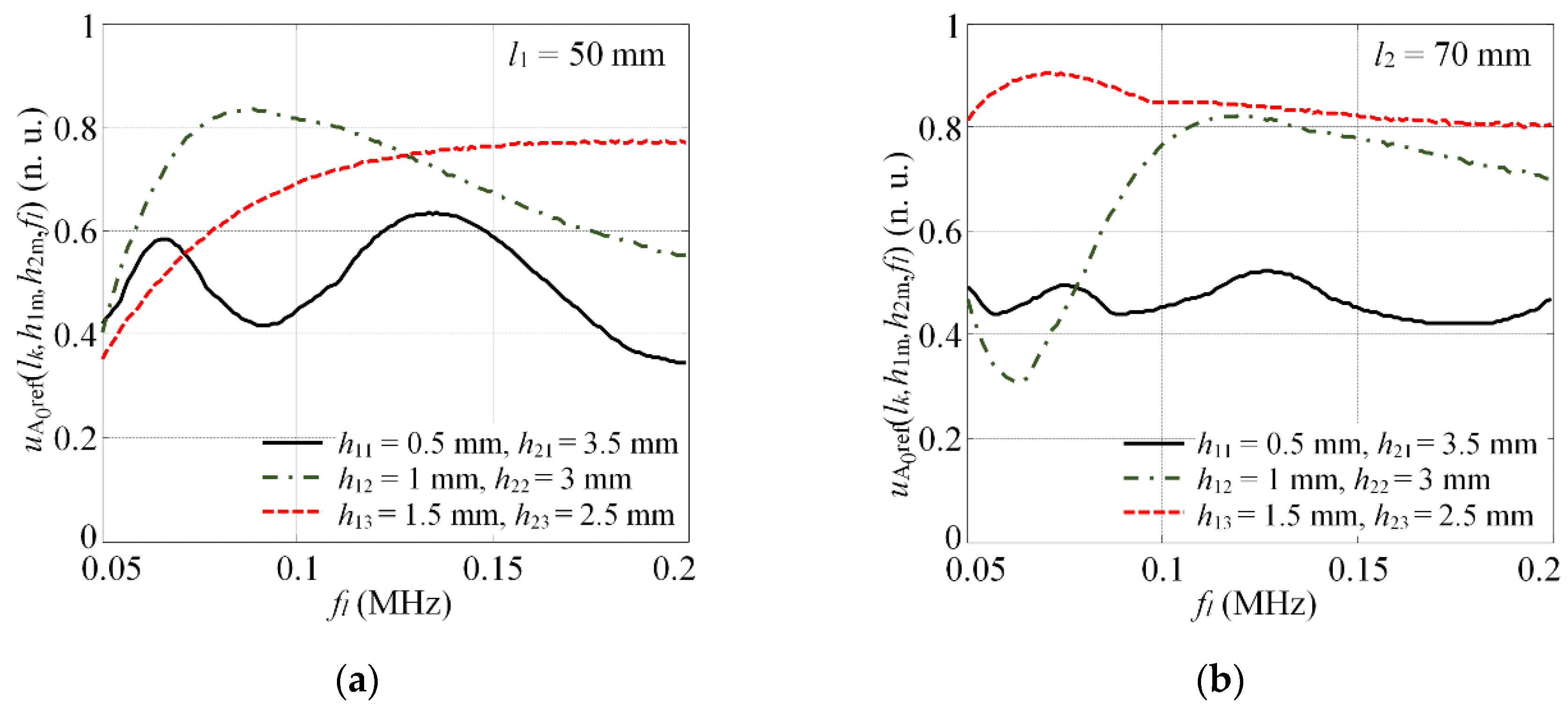
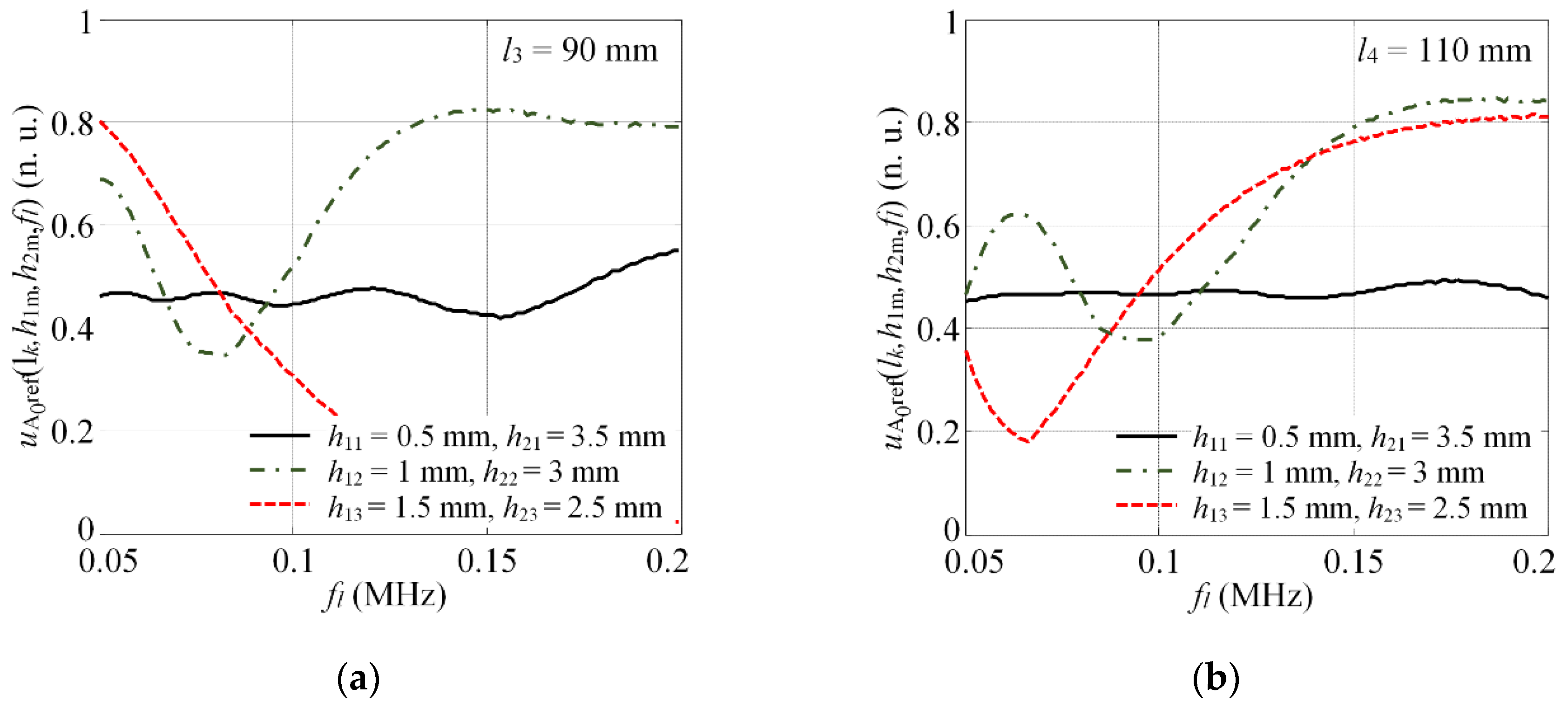
To extract the absolute values of the defect depth, a database of reference dependencies is required which would represent the collection of magnitude variation patterns at different excitation frequencies, the depth and the length of delaminations. Then, the estimated reference dependency can be compared to the experimental measurement in order to extract the depth of delamination. It is presumed that the reference dependency which best matches the experiments is the one that gives the closest definition of the damage depth in the structure. The step-by-step procedure of the damage depth estimation can be outlined as follows:
The source of guided waves E is driven by burst with Gaussian envelope of central frequency f1 to introduce A0 mode in the investigated structure.
Time trace uA0(t) is received with sensor Rref, which represents the structure without the damage (the reference signal). Meanwhile, the other receiver R1 captures time history uIIA0(t) which represents the response of the structure at the monitoring point beyond the defect.
Ratio uA0expf1(t) of peak-to-peak amplitudes of waveforms uA0(t) and uIIA0(t) is estimated at the burst central frequency f1.
Steps 1–3 are repeated over for other excitation frequencies fN = (f1, f2, … fn). As a consequence, the experimental dataset UA0exp(f) = {fN, uA0expf1(t), uA0expf2(t), …, uA0expfn(t)} is collected, where fN denotes the burst central frequencies used for the excitation of A0 mode.
The experimental dataset U
A0exp(
f) is compared to the prescribed database of reference dependencies U
A0ref(
f,
h,
l) (where
h,
l are the depth and the length of damage, respectively). Based upon this concept, the goal is to select the single reference dependency that is the closest to the experimental data. The criteria to characterize the similarity of two datasets include standard deviation as follows:
where
where
hopt is the value which corresponds to the delamination depth where the reference dependency best matches the experimental dataset; U
A0ref(
f,
h,
l) is the calculated reference dependency; U
A0exp(
f) is the experimental dataset;
h and
l are the depth and the length of delamination, respectively; and “std” and “mean” denote the standard deviation and the arithmetic average, respectively.
If the structure is defect-free, function UA0exp(f) is close to monotonic and does not feature essential amplitude variations. Meanwhile, if the variation in the magnitude ratio is observed, it can be related to the presence of a defect at a particular depth. The proposed depth estimation technique relies under the assumption, that velocities of direct A0 mode in the upper and lower sub laminates are similar and the single wave packet is captured after the exit of delamination. In case of very large and asymmetric defects, two wave packets of A0 mode can appear after the exit of the defect. In such a case, the inspection frequency must be decreased, or the number of signal cycles increased in order to maintain a single wave packet and to observe magnitude variation patterns.
2.3. Method to Assess the Length of Defect
If the depth of the defect is determined, its length can be estimated from the delay between “direct A
0 transmission”
uIIA0(
t) and “first A
0 arrival”
uIA0(
t) which can be denoted as Δ
tA0. Delay Δ
tA0 is proportional to the excitation frequency and the propagation path of S
0 mode, which itself is actually determined by the length of the defect (
Figure 5). The time delay between two neighboring wave packets can be estimated according to:
where
uIA0(
t) and
uIIA0(
t) are the wave packets of “first A
0 arrival” and “direct A
0 transmission”, and HT denotes the Hilbert transform. Then, the length of the defect at a particular depth
h can be calculated as:
The Equation (7) calculates mean defect length from a set of defect lengths obtained at different excitation frequencies. If multiple burst central frequencies are used to excite the guided waves, the group velocity values of A0 and S0 modes should be taken at different central frequencies, which allow one to consider the dispersion.
As the “direct A
0 transmission”
uIIA0(
t) is the result of the interference between the wave packets propagating above and below the defect, the maximum of the wave after the exit of delamination (
uIIA0(
t)) may be shifted and no longer correspond to the wave energy velocity. Hence the delay Δ
tA0 in Equation (6) will be estimated with some error. The best way here would be to calculate the delay according to the mean energy (mass center) of the signal [
32]. However, in such case the time window covering entire signal should be selected. Such a task is not trivial due to the dispersion of A
0 mode signals, presence of other modes and reflections from object boundaries. Additionally, the different frequency components of the dispersed A
0 mode are redistributed in the envelope of the signal. The lower frequency components are concentrated at the tail of the signal. So, the energy of wave packet
uIIA0(
t) should be related to a particular frequency and velocity which are used for estimation of the time of flight. By using a maximum or Hilbert envelope of the signal it can be assumed that it corresponds to the dominant frequency of the signal and gives sufficient ToF accuracy.
It is noteworthy that, for the reliable operation of the method, direct uIIA0(t) and converted modes uIA0(t) must be separated in the time domain to an adequate extent in order to be able to measure the time delay between the two wave packets. Thus, there exists the minimum size of a defect that can be evaluated by using this approach. Such a minimum detectable defect is frequency dependent, so higher frequency signals can be used to improve sizing accuracy. It is important that the depth of the defect strongly influences the accuracy of the delamination length estimation, especially in the presence of significant dispersion. If the depth of the defect is unknown, such an approach becomes valid in non-dispersive regions only. However, by using the proposed delamination depth estimation technique, the thicknesses and velocities in the upper and lower sub-laminate can be determined, which leads to the improved accuracy of the delamination length evaluation.
5. Conclusions
A model-based method to estimate the absolute depth and length of delamination was proposed which is based on the magnitude variation pattern and the time-of-flight measurement of A0 mode at different excitation frequencies.
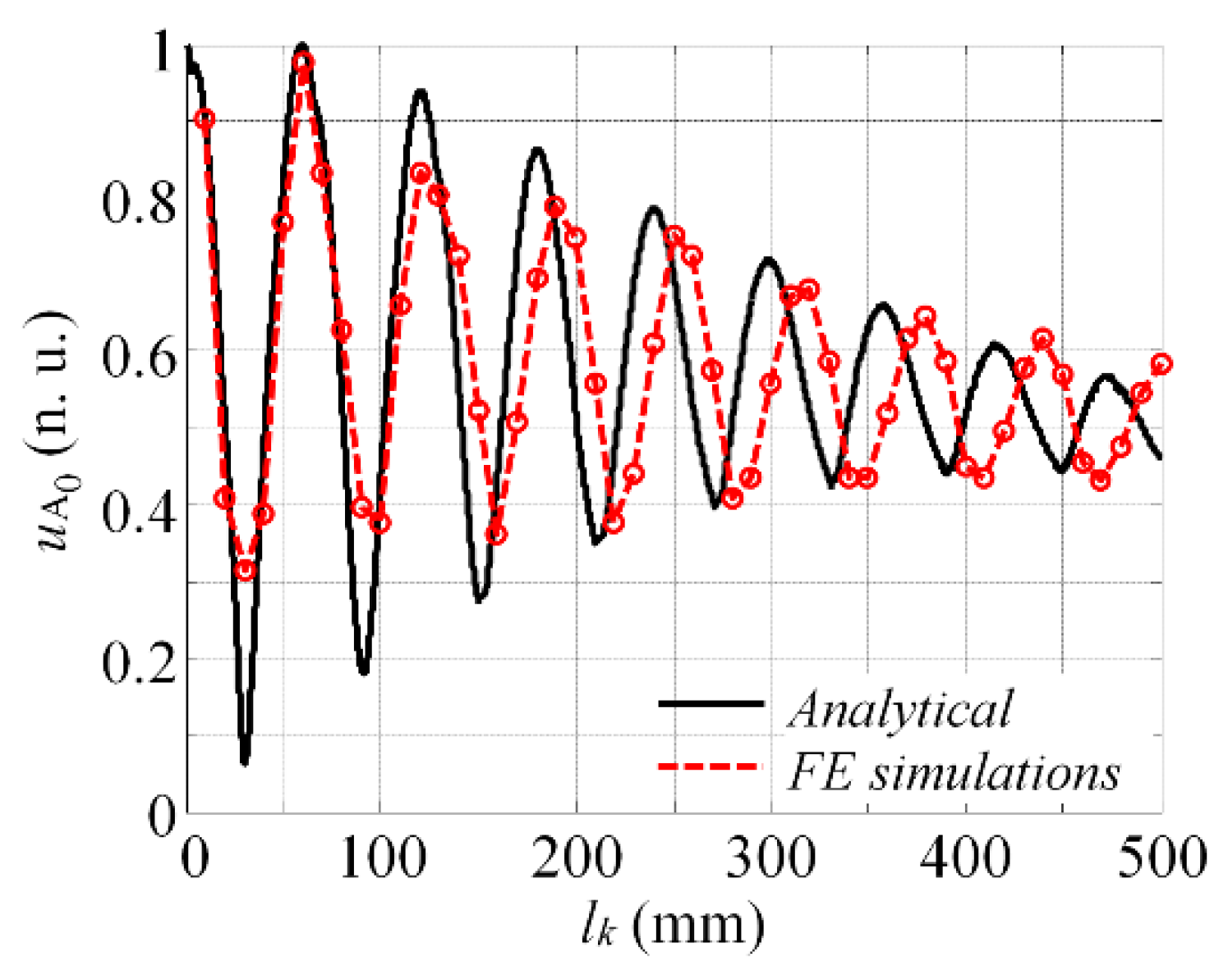
A reference dependency estimation technique was developed which allows predicting the magnitude variation patterns of A0 mode at different depths and lengths of a delamination-type defect. It was shown that, in comparison with the experimental measurements, the reference dependencies can be used to extract the absolute depth of the delamination. The proposed delamination depth estimation technique exploits the phase velocity dependency of A0 mode on the thickness of the sub-laminate, thus, different magnitude variation patterns at different excitation frequencies are observed. As a result, the proposed method provides improved depth estimation accuracy even in the presence of significant dispersion. Furthermore, finite element verification demonstrated that the defect depth can be estimated with a high accuracy even in those cases when the thickness of the sub-laminate that is created by the presence of the defect is relatively thin in comparison with the wavelength of A0 mode. The performance of the proposed method was demonstrated and verified in detecting and describing delamination-type defects of various lengths and depths.
It was demonstrated that the length of delamination at a fixed depth can be reliably estimated from the delay time between the converted and direct A0 modes by exploiting the conversion of the incident A0 mode to S0 mode within the defect. The proposed approach uses previously obtained information about the depth of the defect, which allows for the determination of the phase velocities of A0 and S0 modes in the upper and lower sub-laminates. The results of our numerical validation demonstrated that the size of the defect can be reconstructed with an error of approximately 6%.
The main value of the proposed technique lies in multi-frequency excitation, which leads to different magnitude patterns of A0 mode for delamination depth assessment and more accurate velocity values for defect length estimation. Hence, such a technique can be used even in the presence of the dispersion of A0 mode and provide information about the absolute depth and length of the damage by employing a few time traces measured at slightly different frequencies.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}