Variable-Diameter Drum with Concentric Threshing Gap and Performance Comparison Experiment


Abstract
1. Introduction
2. Materials and Methods
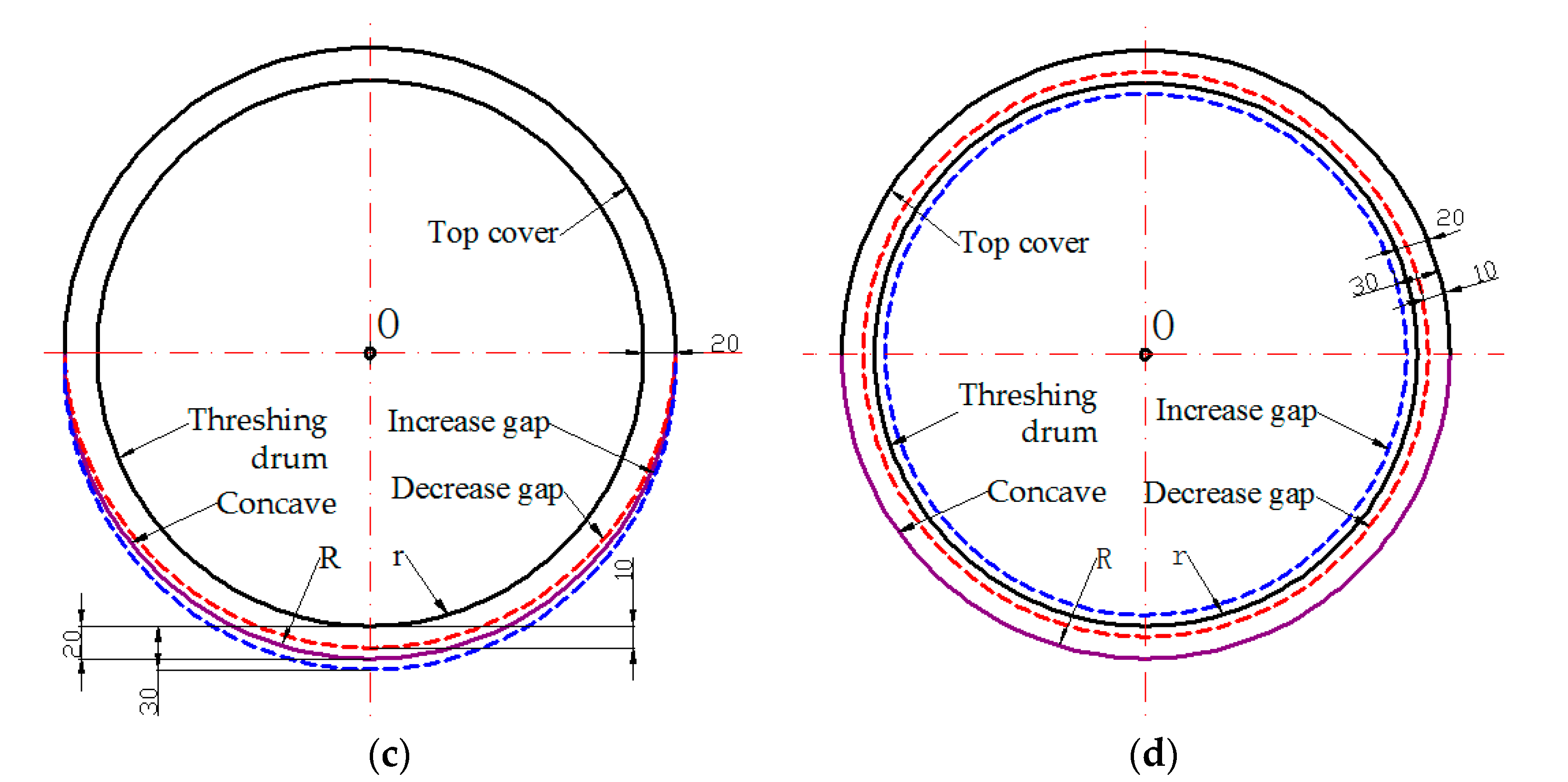
2.1. Comparative Analysis of Both Adjustment Methods
2.2. Design of Variable-Diameter Drum
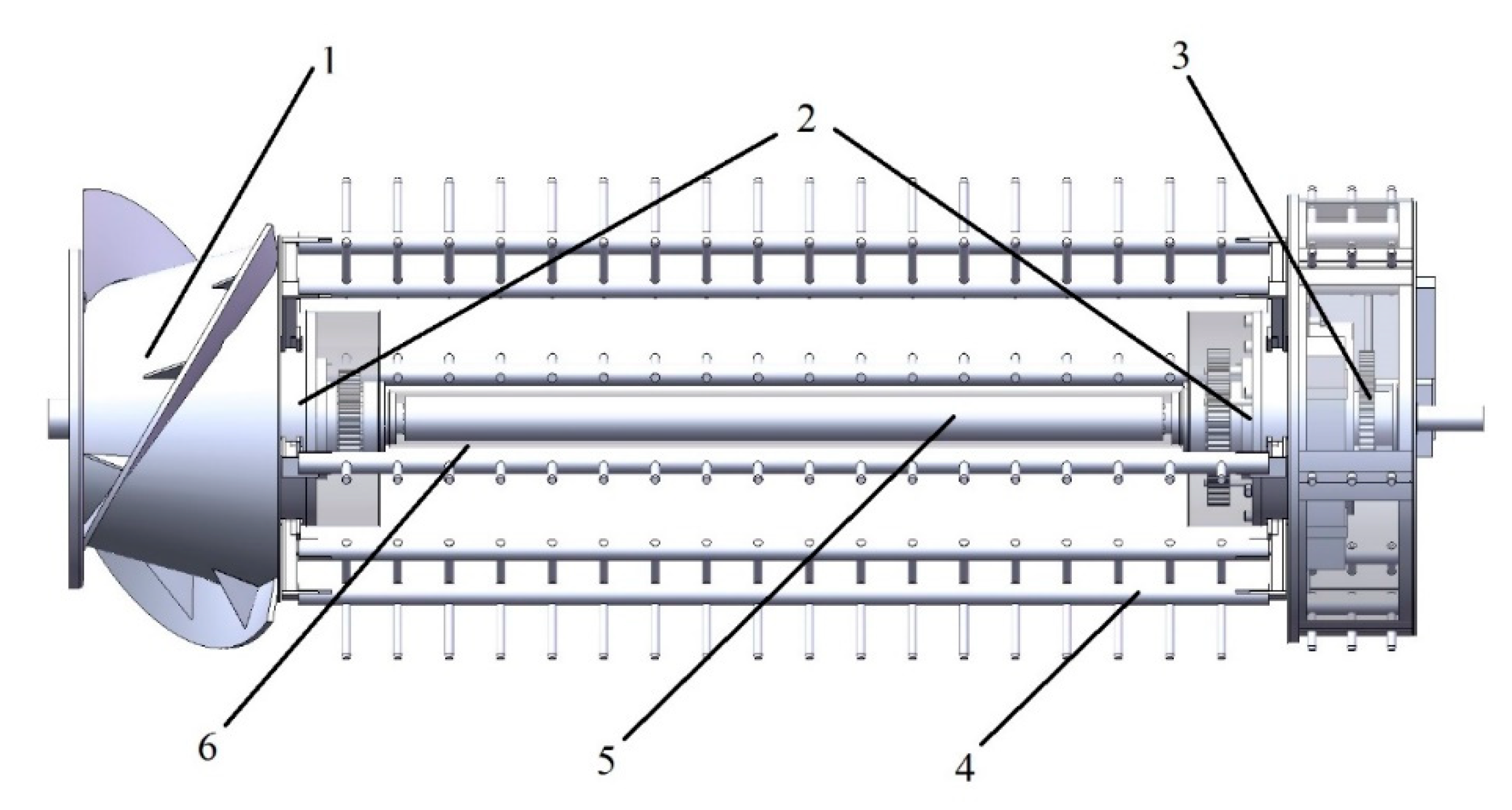
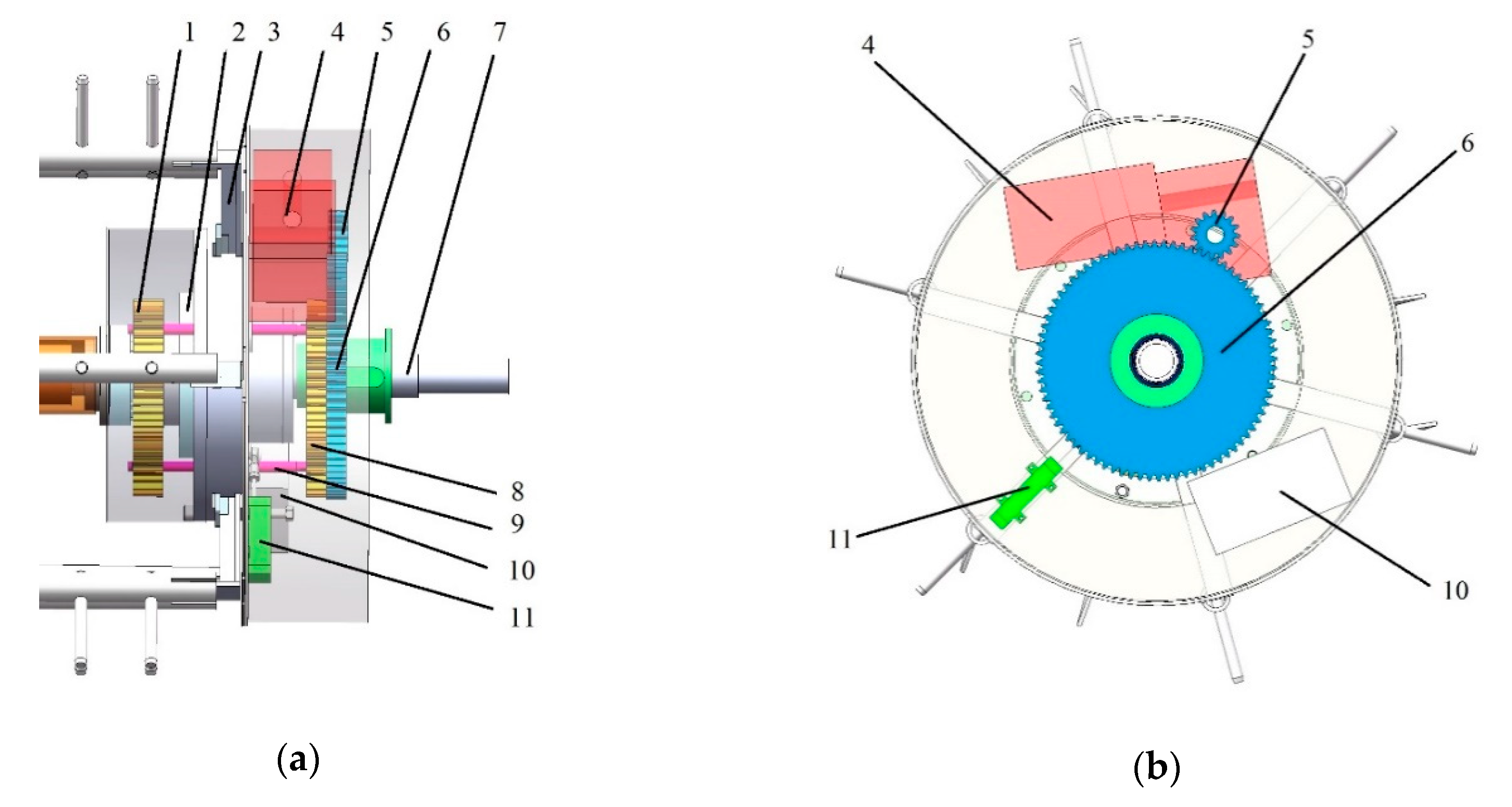
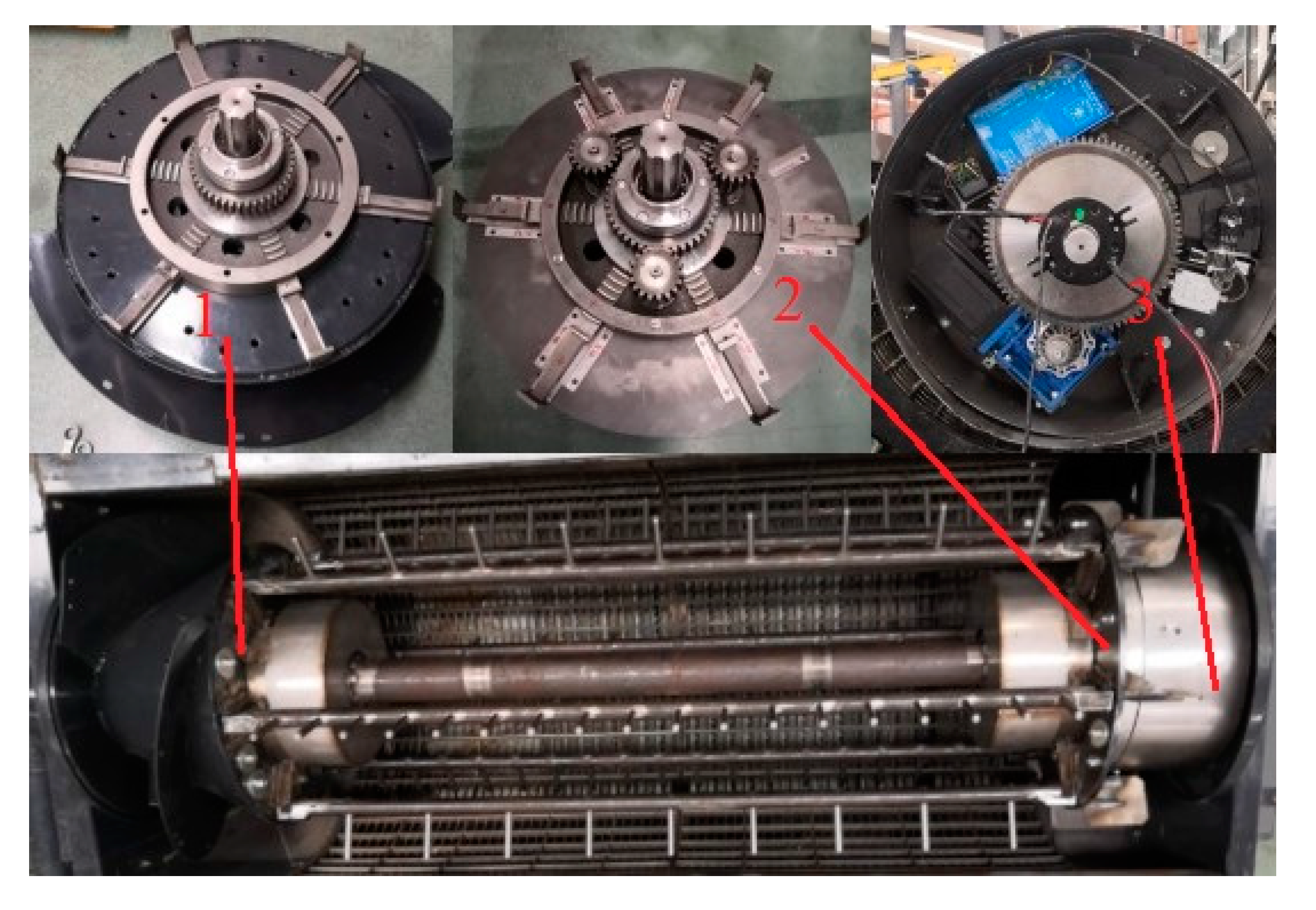
2.2.1. Overall Structure of Variable-Diameter Drum
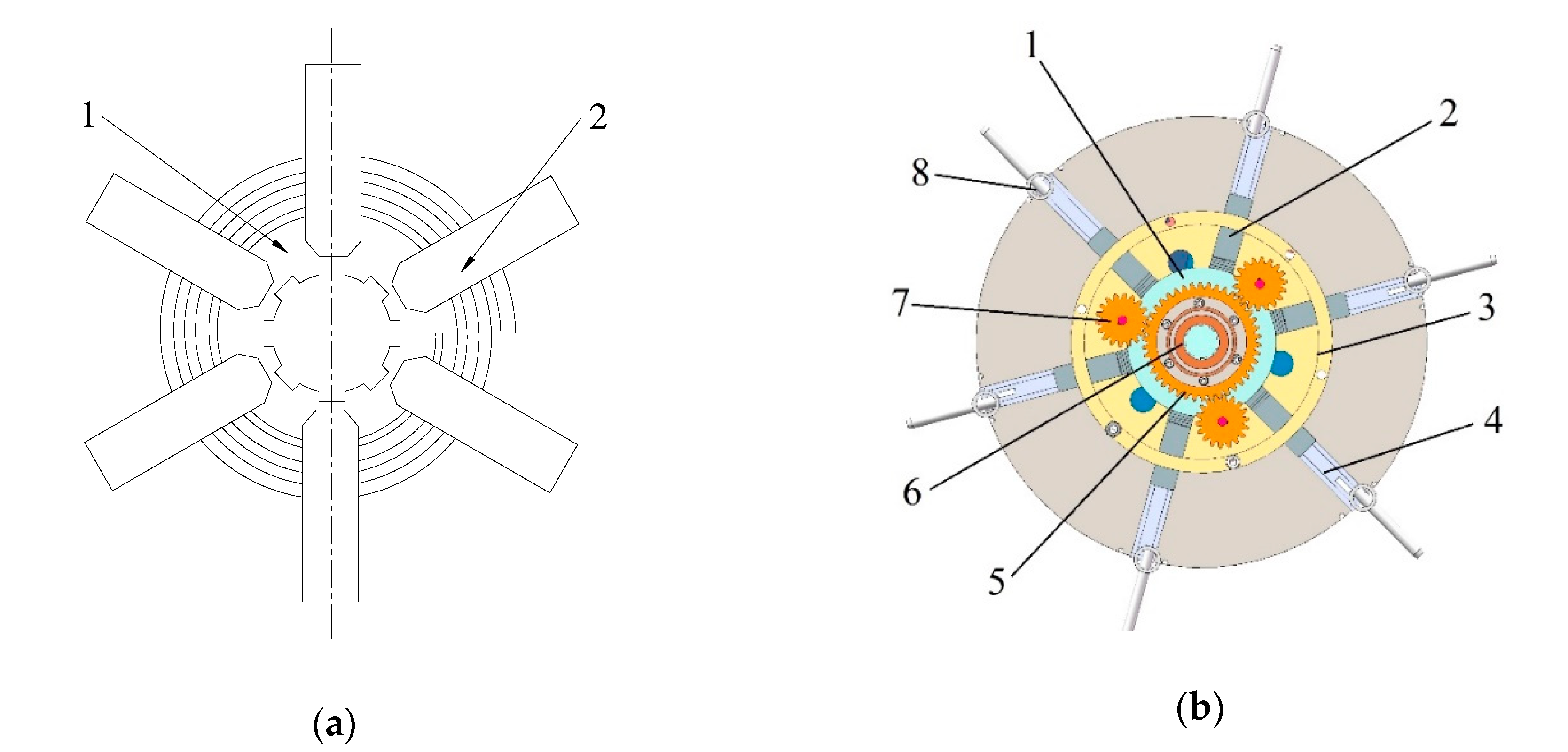
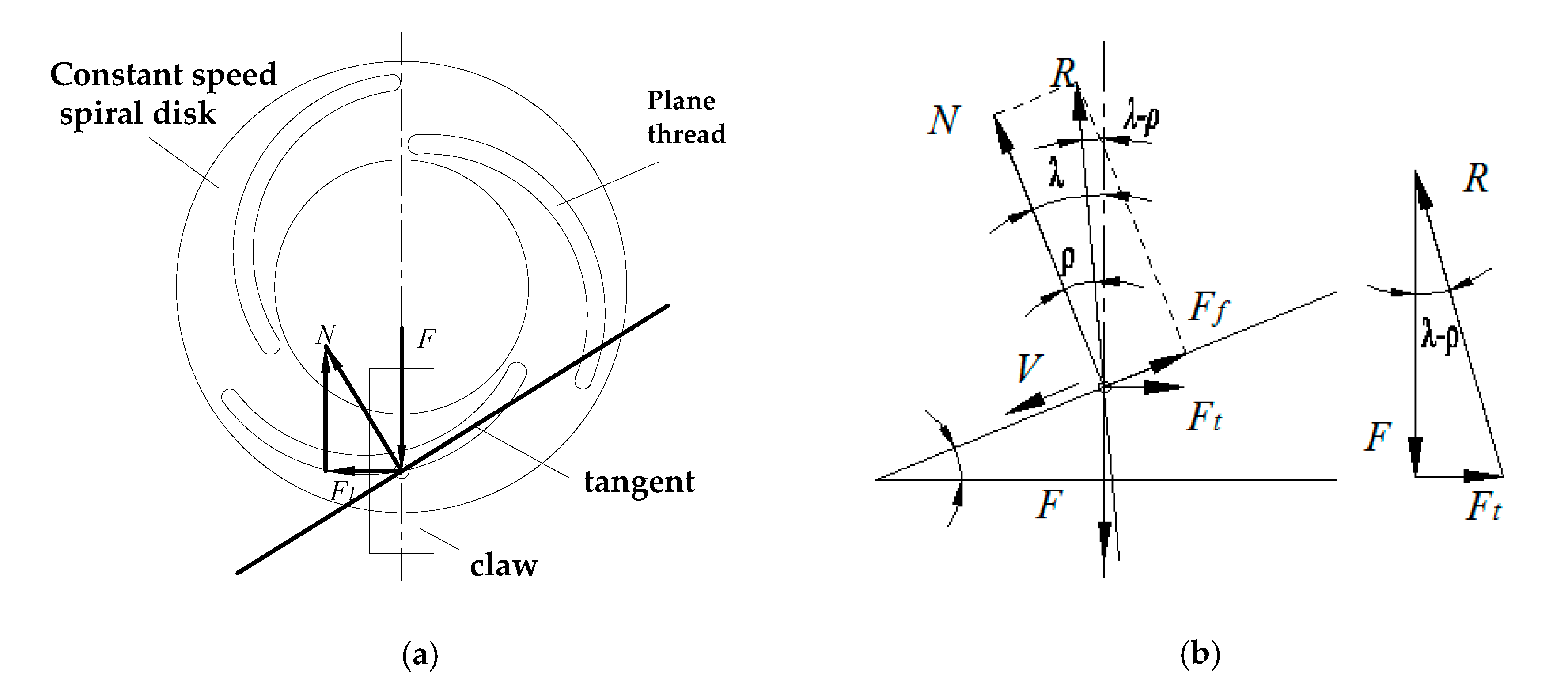
2.2.2. Diameter Adjustment Device
2.2.3. Electronic Control Self-Locking Device
2.3. Comparative Experiment in Terms of Threshing Performance
3. Results and Discussion
3.1. Overall Assembly and Operating Principle of Variable-Diameter Drum
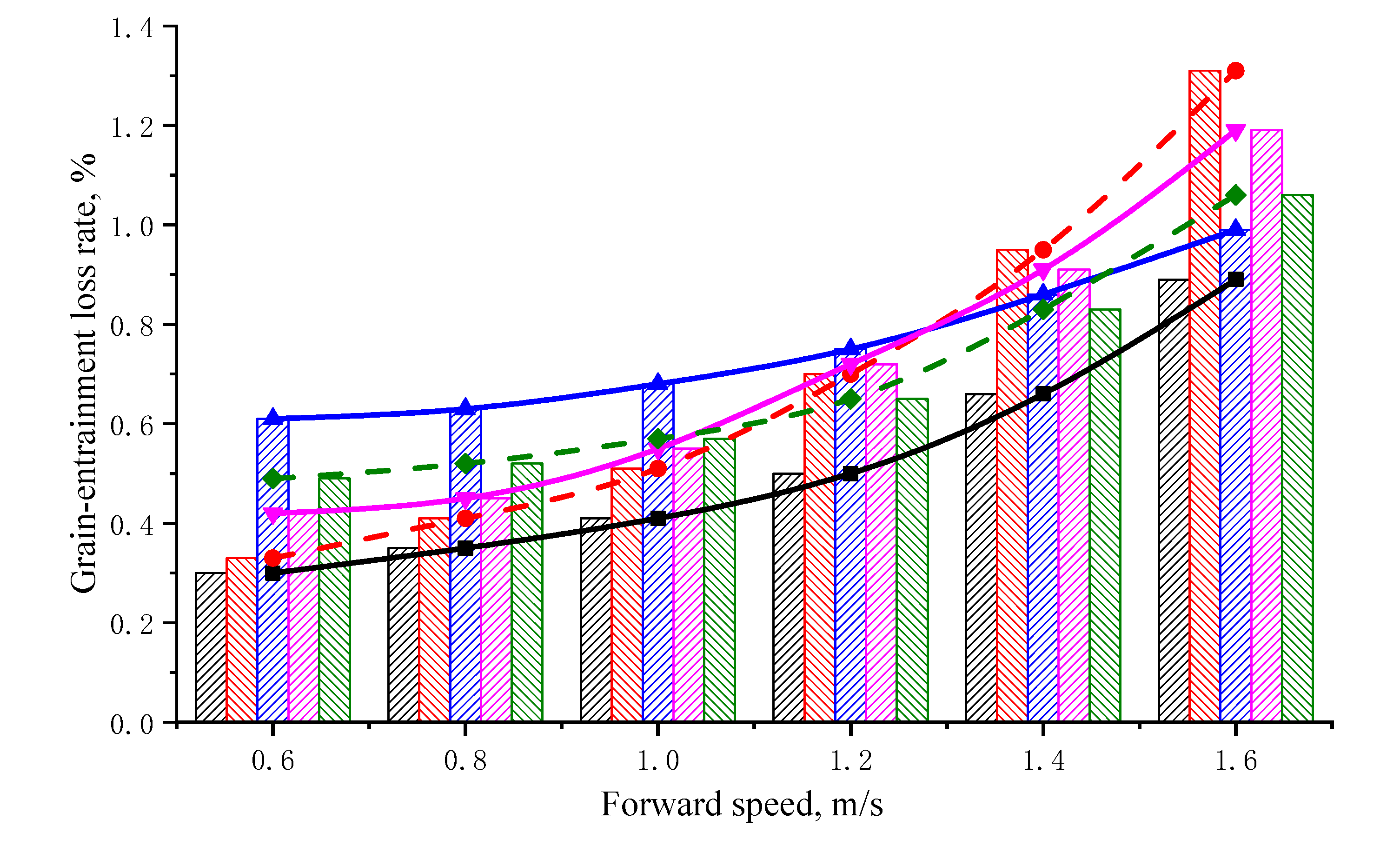
3.2. Grain-Entrainment Loss Rate
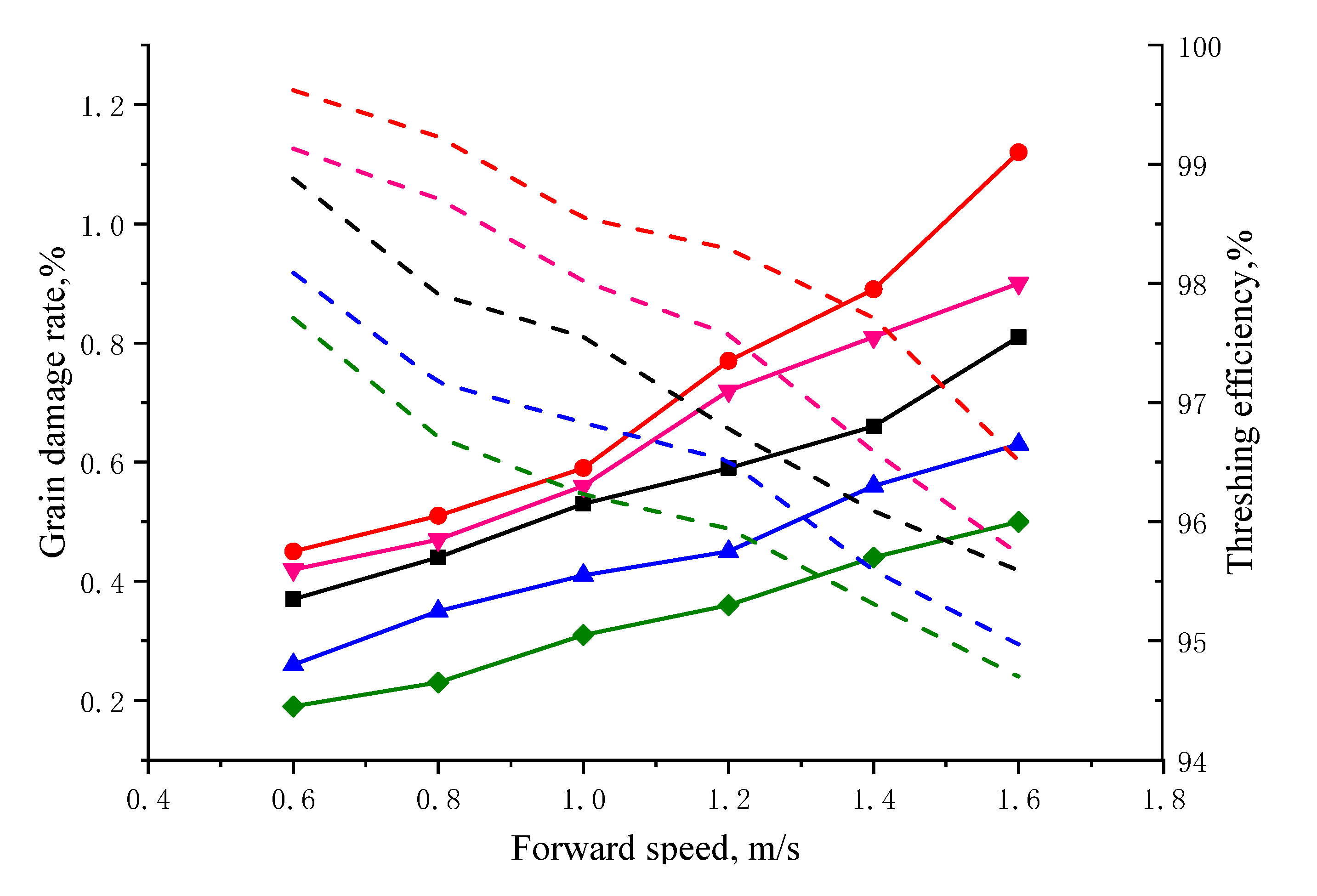
3.3. Grain Damage Rate and Threshing Efficiency
3.4. Power Consumption of Thresher Device
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yuan, L.P. Progress in super-hybrid rice breeding. Crop. J. 2017, 5, 100–102. [Google Scholar] [CrossRef]
- Liang, Z.W.; Li, Y.M.; Baerdemaeker, J.; Xu, L.Z. Development and testing of a multi-duct cleaning device for tangential- longitudinal flow rice combine harvesters. Biosyst. Eng. 2019, 182, 95–106. [Google Scholar] [CrossRef]
- Kawamura, N.; Hisashi, H. A basic study on harvesting of standing grain. J. Soc. Agr. Mach. 1971, 33, 156–162. [Google Scholar]
- Toshikazu, M.; Tatsuro, S. The evaluation of harvest loss occurring in the ripening period using a combine harvester in a shattering-resistant line of common buckwheat. Japanese J. Crop. Sci. 2017, 86, 62–69. [Google Scholar]
- Singh, K.N.; Singh, B. Effect of crop and machine parameters on threshing effectiveness and seed quality of soybean. J. Agric. Eng. Res. 1981, 17, 23–28. [Google Scholar] [CrossRef]
- Dosa, A. Mechanization of peanut harvesting in Malaysia. Agric. Mech. Asia, Afr. Lat. Am. 1984, 15, 44–48. [Google Scholar]
- Alizadeh, M.R.; Bagheri, I. Field performance evaluation of different rice threshing methods. Int. J. Nat. Eng. Sci. 2009, 3, 139–143. [Google Scholar]
- Osueke, C.O. Simulation and optimization modelingof performance of a cereal thresher. Int. J. Eng. Technol. IJET-IJENS. 2011, 11, 143–152. [Google Scholar]
- Miu, P.I.; Kutzbach, H.D. Modeling and simulation of grain threshing and separation in threshing units-Part I. Comput. Electron. Agric. 2007, 60, 96–104. [Google Scholar] [CrossRef]
- Regier, B.D.; Matousek, A.R.; Kelvin, E.K. Combine harvester processing system having adjustable concaves on a suspension system. U.S. Patent 8,133,100, 13 March 2012. [Google Scholar]
- Bergkamp, A.R.; Regier, B.D. Constant pressure concave assembly in a combine harvester processing system. U.S. Patent 9,220,200, 29 December 2015. [Google Scholar]
- Matousek, R.A.; Claerhout, B.S.; Secrest, R.S. Three section threshing concave configuration and adjustment mechanism for an agricultural harvesting combine. U.S. Patent 0,716,259, 21 July 2020. [Google Scholar]
- GIvan, V.N.; Vla, D. Kinematic study of threshing process conducted by tangential threshing system of conventional cereal harvesting combines. INMATEH-Agric. Eng. 2014, 44, 59–68. [Google Scholar]
- Tang, Z.; Li, Y.M. Modeling and design of a combined transverse and axial flow threshing unit for rice harvesters. Span. J. Agric. Res. 2014, 12, 973–983. [Google Scholar] [CrossRef]
- Pahoni, C. Research regarding the performances obtained by the 560 and the 750 Claas Lexion combines in maize grain harvesting. Sci. Pap. 2012, 69, 331–333. [Google Scholar]
- Steponavičius, D.; Pužauskas, E.; Špokas, L.; Jotautienė, E.; Kemzūraitė, A.; Petkevičius, S. Concave design for high-moisture corn ear threshing. Mechanika 2018, 24, 80–91. [Google Scholar] [CrossRef]
- Sudajan, S.; Salokhe, V.M.; Triratanasirichai, K. PM—power and machinery: Effect of type of drum, drum speed and feed rate on sunflower threshing. Biosyst. Eng. 2002, 83, 413–421. [Google Scholar] [CrossRef]
- Su, Z.; Li, Y.M.; D, Y.H.; Tang, Z.; Liang, Z.W. Simulation of rice threshing performance with concentric and non-concentric threshing gaps. Biosyst. Eng. 2020, 197, 270–284. [Google Scholar] [CrossRef]
- Kang, J.; Yuan, Y.; Liu, H. Load control of threshing cylinder of small-sized harvester based on current detection. Eng. Agric. 2017, 150–156. [Google Scholar] [CrossRef]
- Meusel, C.; Kieu, D. Evaluating operator harvest technology within a high-fidelity combine simulator. Comput. Electron. Agric. 2018, 148, 309–321. [Google Scholar] [CrossRef]
- Chen, J.; Lian, Y.; Li, Y.M. Design of sampling device for rice grain impurity sensor in grain-bin of combine harvester. Chin. Soc. Agric. Mach. 2019, 35, 18–25. [Google Scholar]
- Chen, J.; Gu, Y.; Lian, Y. Online recognition method of impurities and broken paddy grains based on machine. Chin. Soc. Agric. Mach. 2018, 34, 187–194. [Google Scholar]
- Liang, Z.W.; Li, Y.M.; Xu, L.Z. Sensor for monitoring rice grain sieve losses in combine harvesters. Biosyst. Eng. 2016, 147, 51–56. [Google Scholar] [CrossRef]
- Chen, J.; Lian, Y.; Li, Y.M. Real-time grain impurity sensing for rice combine harvesters using image processing and decision-tree algorithm. Comput. Electron. Agric. 2020, 175, 105591. [Google Scholar] [CrossRef]
- Mao, H.; Wang, Q.; Li, Q. Modelling and simulation of the straw-grain separation process based on a discrete element model with flexible hollow cylindrical bonds. Comput. Electron. Agric. 2020, 170, 105229. [Google Scholar] [CrossRef]
- Chen, J.; Ning, X.; Li, Y.M.; Yang, G. A fuzzy control strategy for the forward speed of a combine harvester based on KDD. Appl. Eng. Agric. 2017, 33, 15–22. [Google Scholar]
- Mahmoud, A.R.; Buchele, W.F. Corn Ear Orientation effects on mechanical damage and forces on concave. Trans. Asae. 1975, 18, 0444–0447. [Google Scholar] [CrossRef][Green Version]
- Ferreira, V.F.; Oliveira, J.A.; Ferreira, T.F. Quality of maize seeds harvested and husked at high moisture levels. J. Seed Sci. 2013, 35, 276–283. [Google Scholar] [CrossRef][Green Version]
- Xu, B.Y.; Ni, X.D.; Wang, Y. Optimization of threshing quality control strategy based on Type-2 fuzzy logic controller. ELEKTRONIKA IR ELEKTROTECHNIKA 2020, 2, 26. [Google Scholar]
- Tang, Z.; Li, Y.M. Experiments on variable-mass threshing of rice in the tangential-longitudinal-flow combine harvester. J. Agric. Sci. Technol. 2013, 15, 1319–1334. [Google Scholar]
- Sessiz, A.; Koyuncu, T.; Pinar, Y. Soybean threshing efficiency and power consumption for different concave materials. Agric. Mech. Asia, Afr. Lat. Am. 2007, 38, 56–59. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forward Speed/(m/s) | Initial Gap/mm | Threshing Gap with Threshing Drum Adjustment Type/mm | Threshing Gap with Concave Adjustment Type/mm |
|---|---|---|---|
| 0.6 | 20 | 30 | 20–30 |
| 10 | 10–20 | ||
| 0.8 | 20 | 30 | 20–30 |
| 10 | 10–20 | ||
| 1.0 | 20 | 30 | 20–30 |
| 10 | 10–20 | ||
| 1.2 | 20 | 30 | 20–30 |
| 10 | 10–20 | ||
| 1.4 | 20 | 30 | 20–30 |
| 10 | 10–20 |
| Parameter | Value |
|---|---|
| Crop height/cm | 78.5 |
| Spike head height/cm | 17.2 |
| Grain moisture content /% | 20.8 |
| Straw moisture content /% | 70.4 |
| MOG(material other than grain)/Grain ratio | 2.65 |
| Number of grains per spike seed | 129 |
| Weight of 1000 grains /g | 31.9 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Su, Z.; Liang, Z.; Li, Y. Variable-Diameter Drum with Concentric Threshing Gap and Performance Comparison Experiment. Appl. Sci. 2020, 10, 5386. https://doi.org/10.3390/app10155386
Li Y, Su Z, Liang Z, Li Y. Variable-Diameter Drum with Concentric Threshing Gap and Performance Comparison Experiment. Applied Sciences. 2020; 10(15):5386. https://doi.org/10.3390/app10155386
Chicago/Turabian StyleLi, Yaoming, Zhan Su, Zhenwei Liang, and Yu Li. 2020. "Variable-Diameter Drum with Concentric Threshing Gap and Performance Comparison Experiment" Applied Sciences 10, no. 15: 5386. https://doi.org/10.3390/app10155386
APA StyleLi, Y., Su, Z., Liang, Z., & Li, Y. (2020). Variable-Diameter Drum with Concentric Threshing Gap and Performance Comparison Experiment. Applied Sciences, 10(15), 5386. https://doi.org/10.3390/app10155386