3D Reconstruction of a Single Bubble in Transparent Media Using Three Orthographic Digital Images


Abstract
:
1. Introduction
2. Experimental Apparatus and Visualization
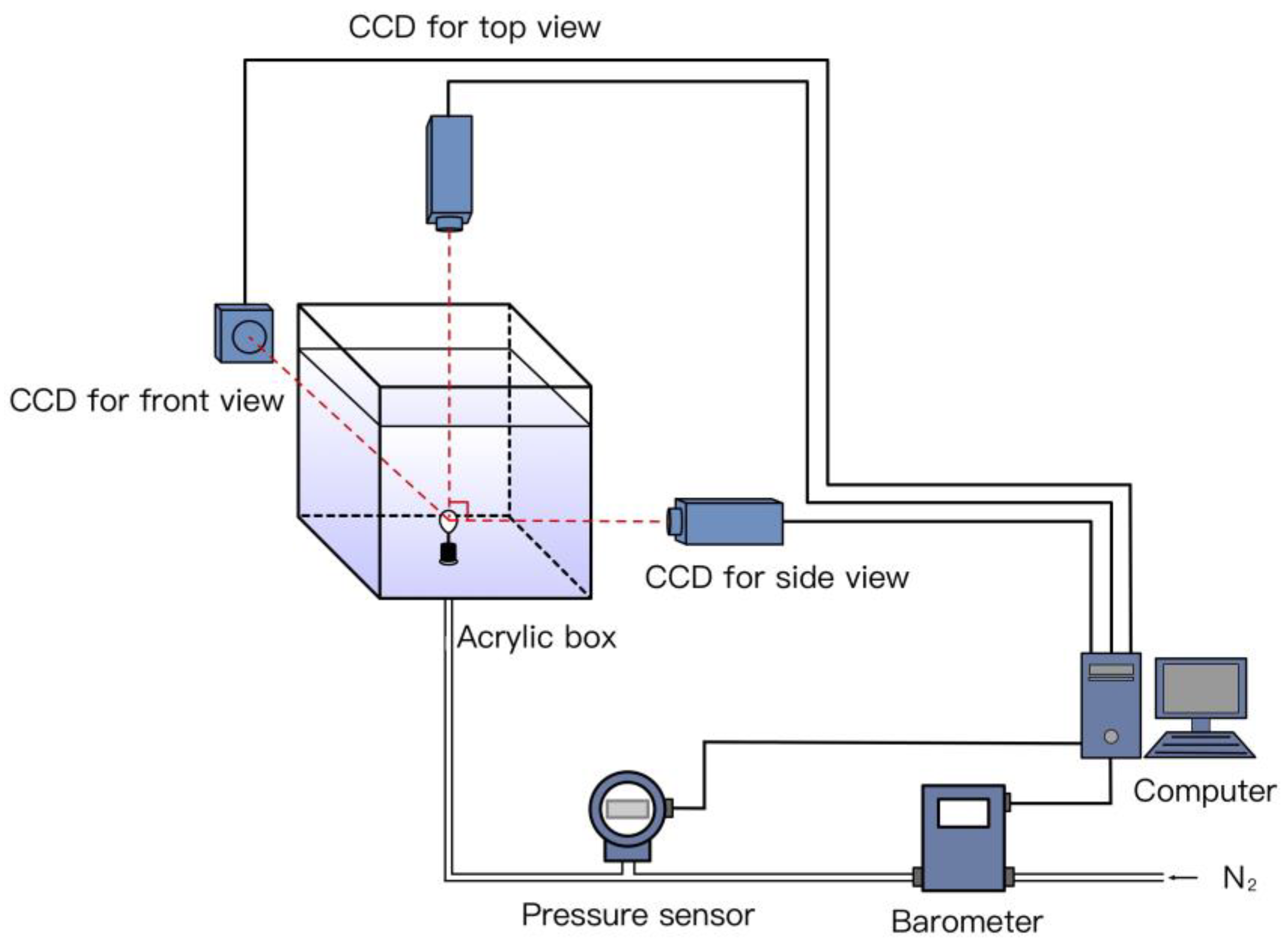
2.1. Experimental Set-Up
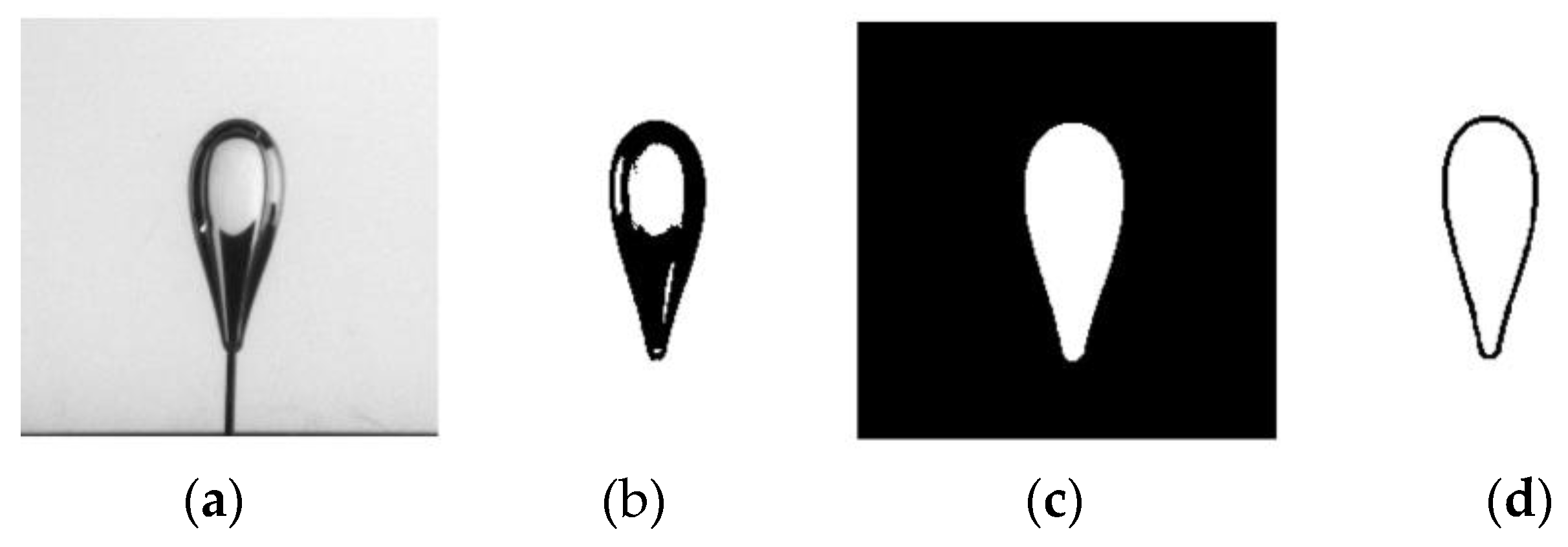
2.2. Image Processing and Camera Calibration
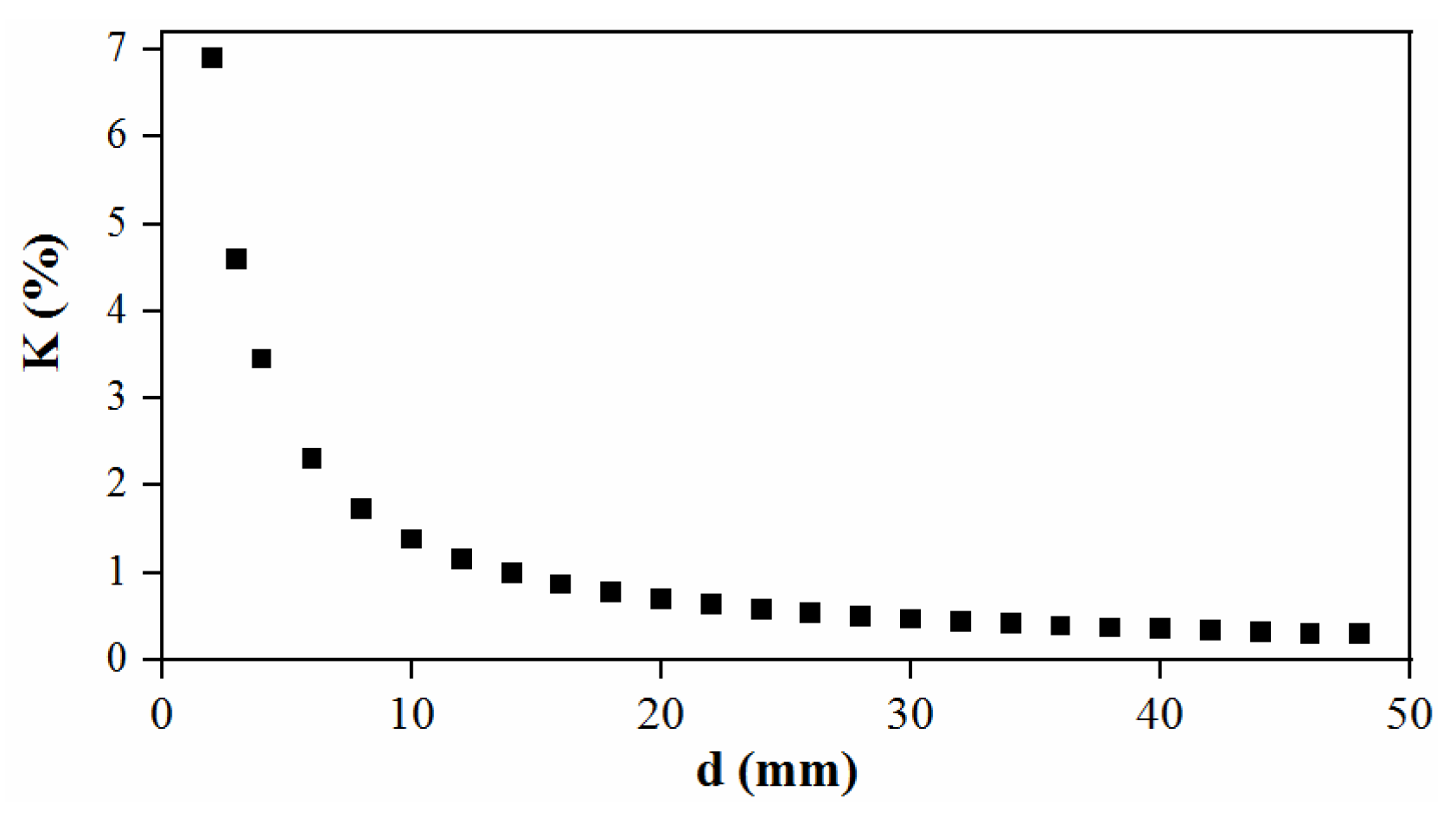
2.3. Measurement Accuracy
3. 3D Bubble Reconstruction
3.1. Modified Stacking Ellipse Method
3.2. Bubble Posture Correction
3.3. Calculating Parameters of Horizontal Ellipse Slices
4. Benchmark with Synthetic Bubbles
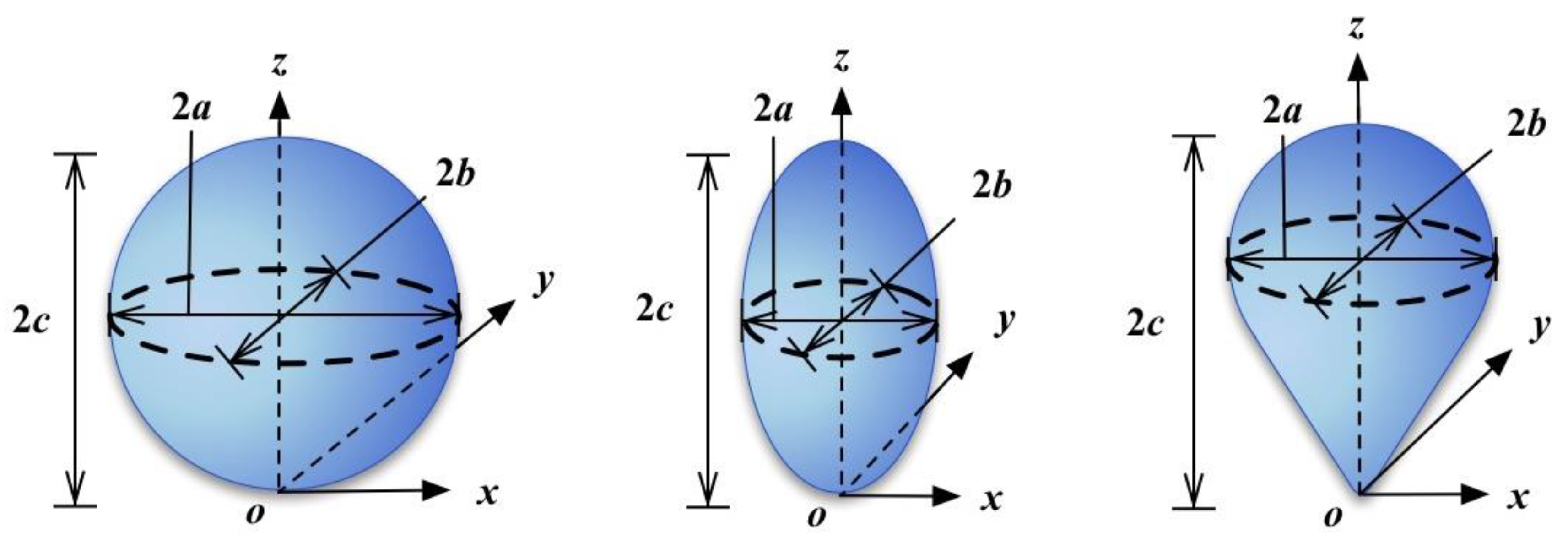
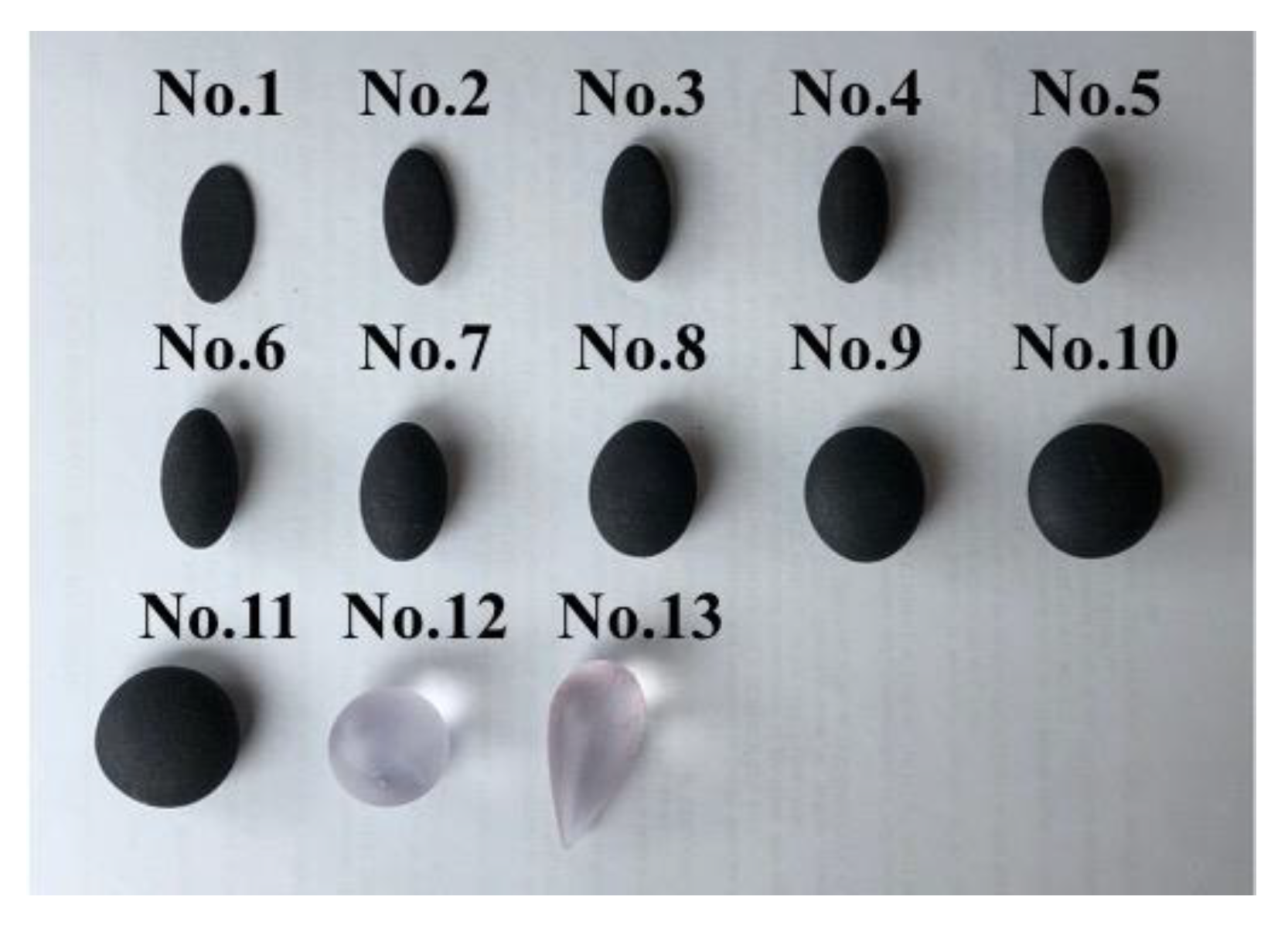
4.1. Bubble Samples
4.2. Effects of Posture Correction
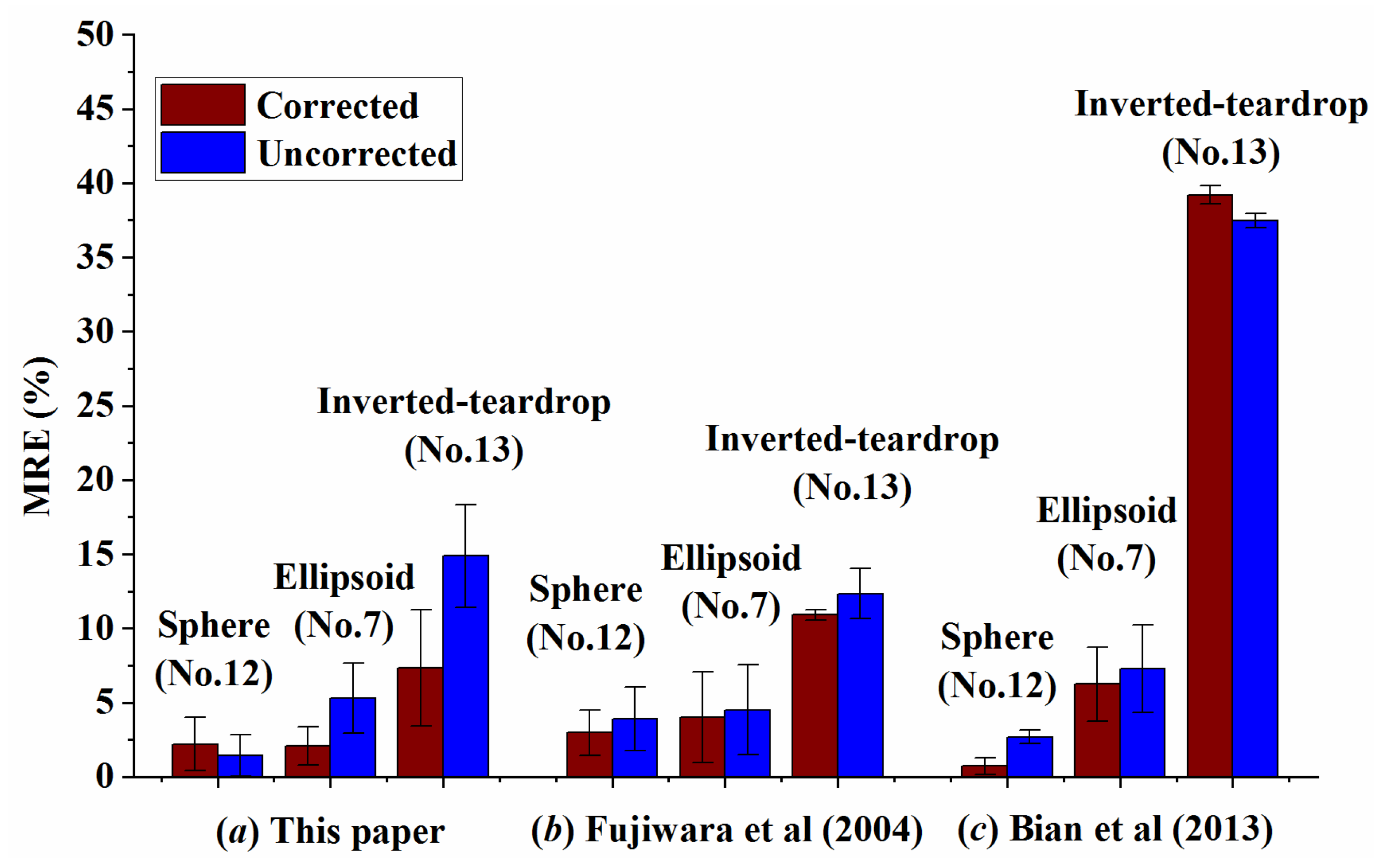
4.3. Effects of Different Shapes
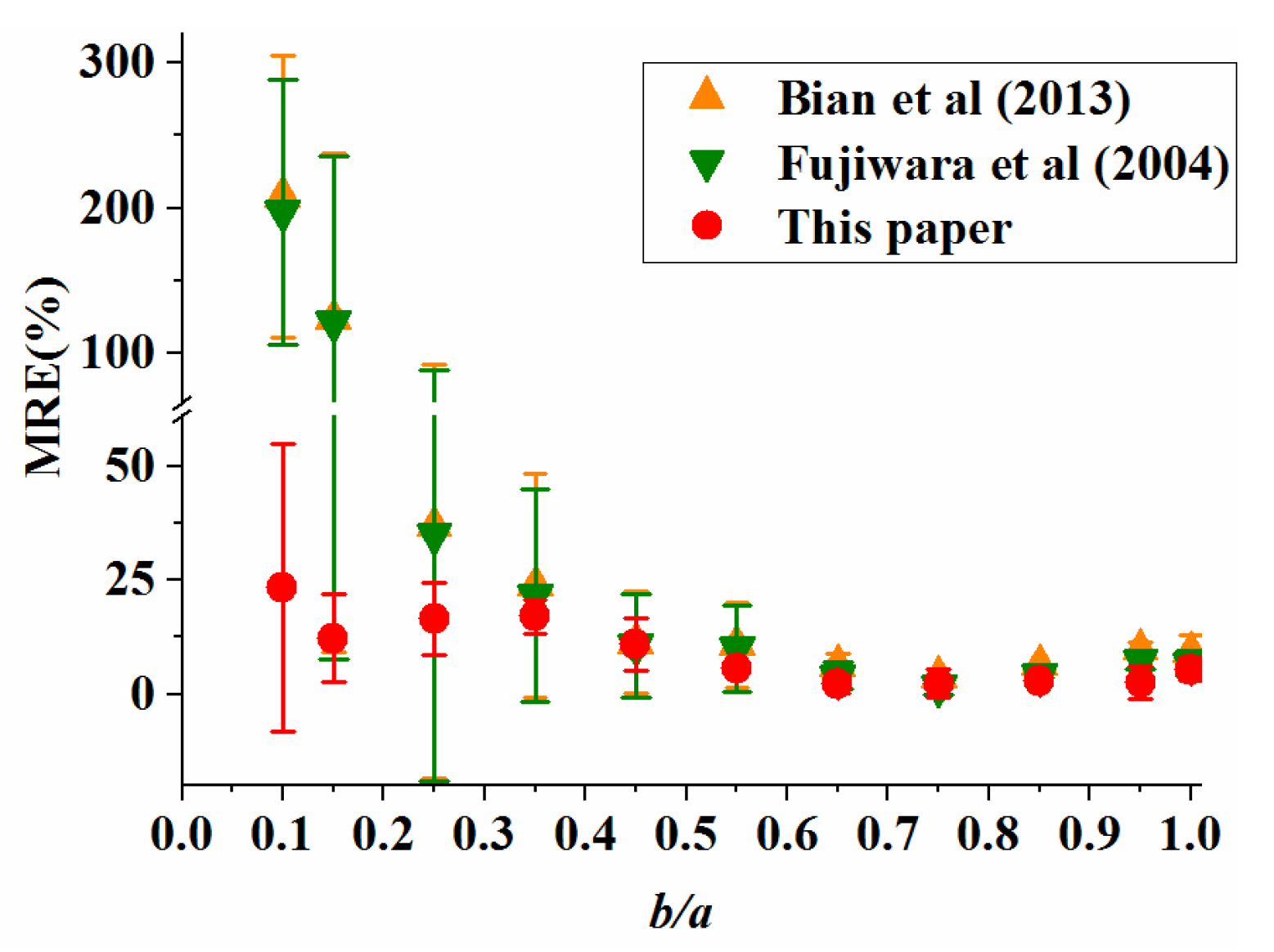
4.4. Effects of Deformation
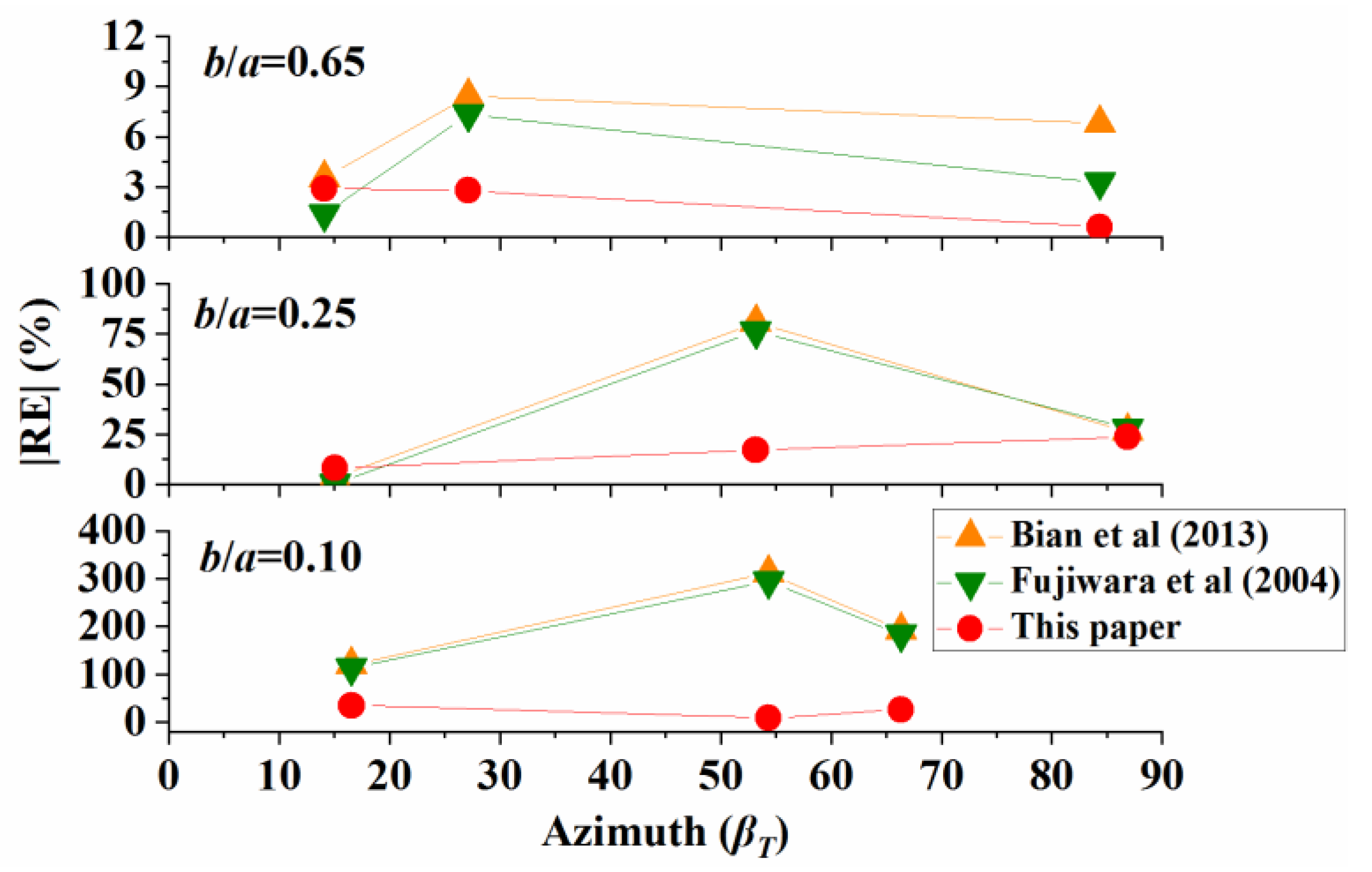
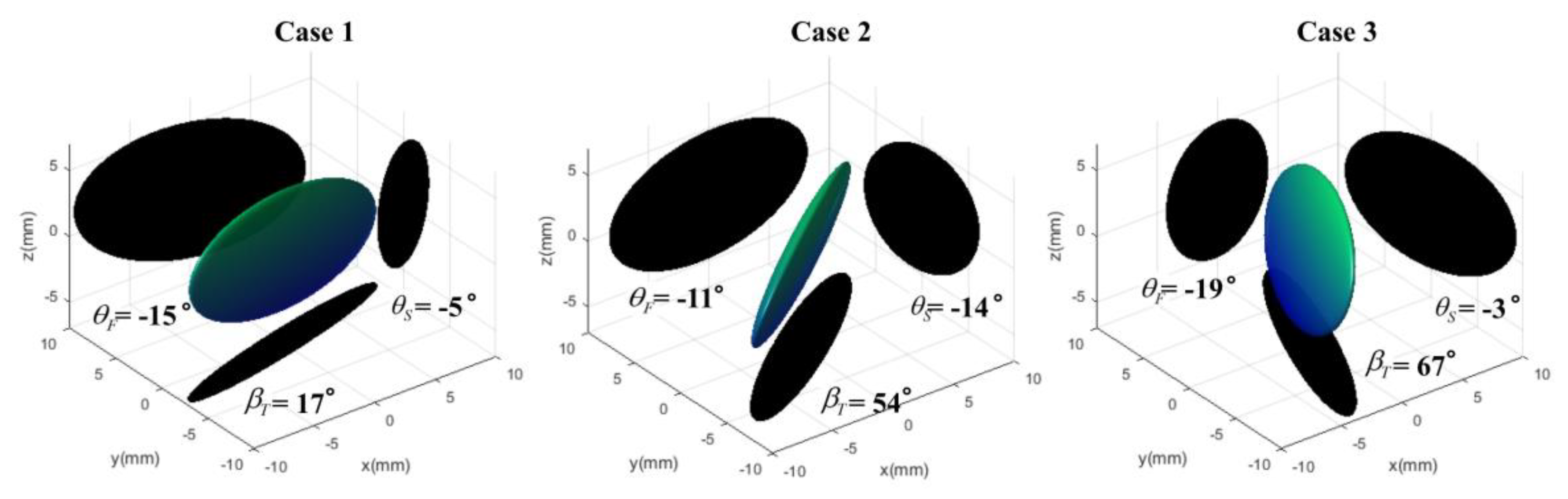
4.5. Effects of Azimuth Angle
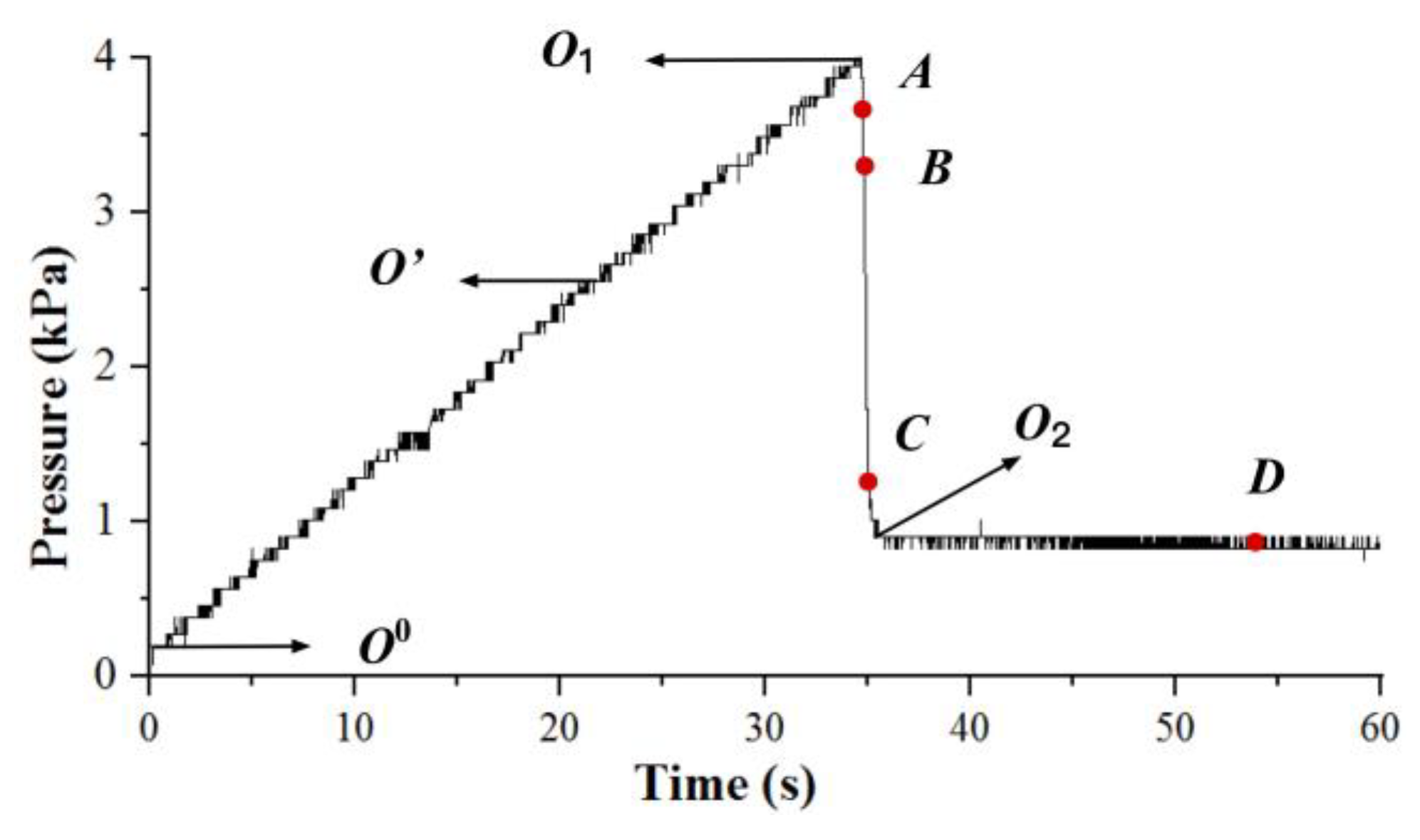
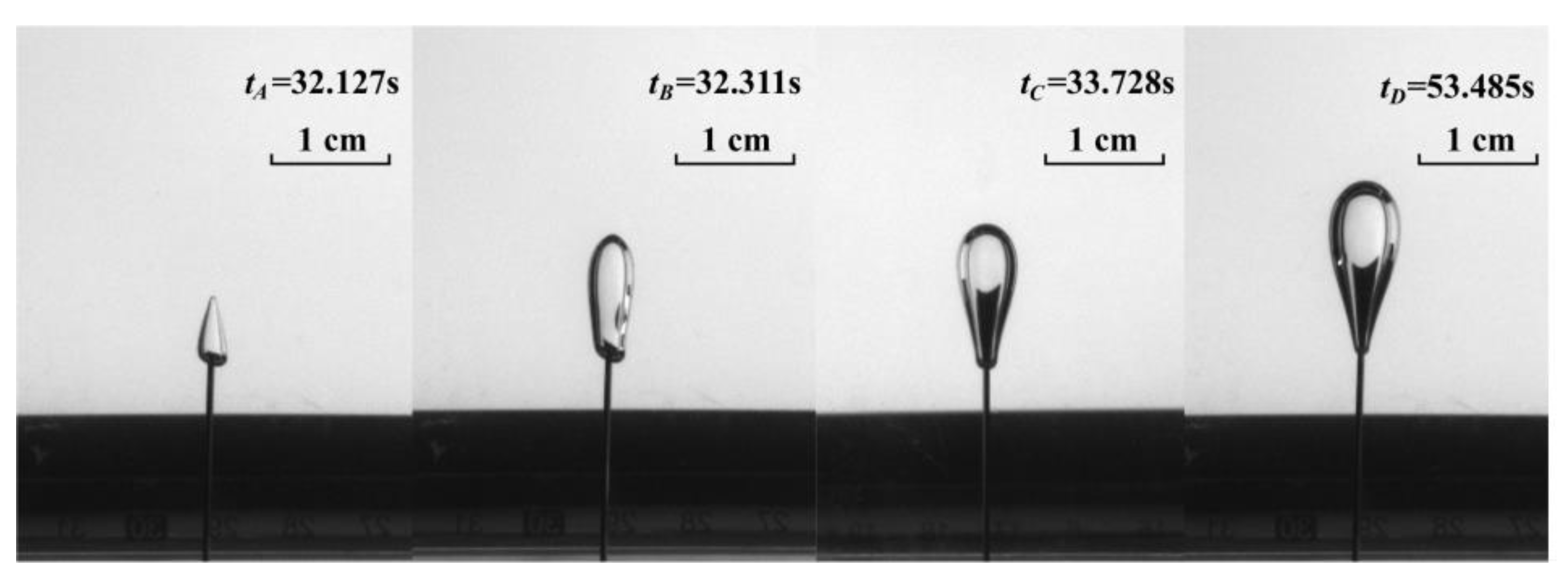
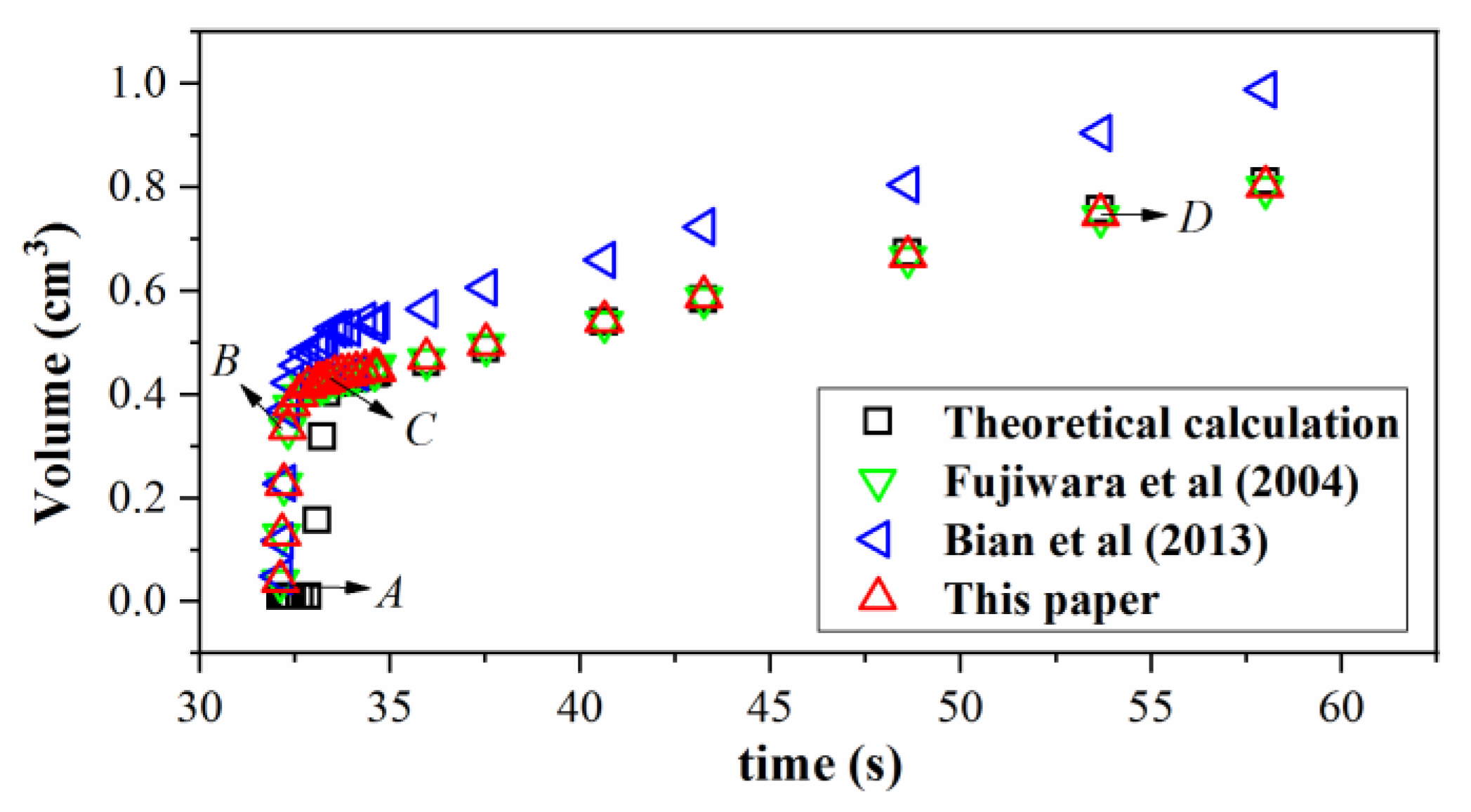
5. Verification by Gas Injection Test
6. Conclusions
- (1)
- The posture correction helps to improve the reconstruction accuracy in this paper, especially for the bubble with a horizontal cross-section remarkably deviating from a circle.
- (2)
- The dimensionless parameters of an ellipse in horizontal section (major and minor semi-axes) are independent of the projection width. By using the dimensionless elliptic parameters, the actual major and minor semi-axes of the horizontal elliptical section of each layer can be quickly calculated.
- (3)
- The method in Bian et al. [20] is more suitable for reconstructing a bubble similar to an ellipsoid because both of the horizontal and vertical deformations inversely impact its accuracy. The vertical deformation has a little influence on the method in Fujiwara et al. [21], but the horizontal deformation contributes significantly to its accuracy, especially when the ratio of the vertical axis to the horizontal axis is smaller than 0.5 or when the azimuth angle deviates greatly from either 0 or 90°.
- (4)
- The method in this paper successfully improves the flaws in methods in Bian et al. [20] and Fujiwara et al. [21]. The method in this paper can better reconstruct the bubble with severe horizontal deformation; in addition, similarly to the method in Fujiwara et al. [21], the vertical deformation has a negligible influence on the reconstruction accuracy of the method in this paper, leading to its higher practicality.
- (5)
Author Contributions
Funding
Conflicts of Interest
References
- Sattari, A.; Hanafizadeh, P. Bubble formation on submerged micrometer-sized nozzles in polymer solutions: An experimental investigation. Colloid. Surface. A. 2019, 564, 10–22. [Google Scholar] [CrossRef]
- Deng, B.; Chin, R.J.; Tang, Y.; Jiang, C.; Lai, S.H. New Approach to Predict the Motion Characteristics of Single Bubbles in Still Water. Appl. Sci. 2019, 9, 3981. [Google Scholar] [CrossRef] [Green Version]
- Clift, R.; Grace, J.R.; Weber, M.E. Bubbles, Drops, and Particles; Academic Press: New York, NY, USA, 2005. [Google Scholar]
- Mirsandi, H.; Smit, W.J.; Kong, G.; Baltussen, M.W.; Peters, E.A.J.F.; Kuipers, J.A.M. Influence of wetting conditions on bubble formation from a submerged orifice. Exp. Fluids 2020, 61, 83. [Google Scholar] [CrossRef] [Green Version]
- Zenit, R.; Feng, J.J. Hydrodynamic Interactions among Bubbles, Drops, and Particles in Non-Newtonian Liquids. Ann. Rev. Fluid Mech. 2018, 50, 505–534. [Google Scholar] [CrossRef]
- Benzing, R.J.; Myers, J.E. Low frequency bubble formation at horizontal circular orifices. Ind. Eng. Chem. 1955, 47, 2087–2090. [Google Scholar] [CrossRef]
- Fourest, T.; Laurens, J.; Deletombe, E.; Dupas, J.; Arrigoni, M. Analysis of bubbles dynamics created by Hydrodynamic Ram in confined geometries using the Rayleigh-Plesset equation. Int. J. Impact Eng. 2014, 73, 66–74. [Google Scholar] [CrossRef]
- Wang, Z.; Qin, Y.; Zou, L. Analytical solutions of the Rayleigh-Plesset equation for N-dimensional spherical bubbles. Sci. China Phys. Mech. 2017, 60, 104721. [Google Scholar] [CrossRef]
- Vafaei, S.; Wen, D. Bubble formation on a submerged micronozzle. J. Colloid Interf. Sci. 2010, 343, 291–297. [Google Scholar] [CrossRef]
- Gharedaghi, H.; Dousti, A.; Eshraghi, J.; Hanafizadeh, P.; Ashjaee, M. A novel numerical approach for investigation of the gas bubble characteristics in stagnant liquid using Young-Laplace equation. Chem. Eng. Sci. 2017, 173, 37–48. [Google Scholar] [CrossRef]
- Zhang, S.; Wang, S.P.; Zhang, A.M.; Cui, P. Numerical study on motion of the air-gun bubble based on boundary integral method. Ocean. Eng. 2018, 154, 70–80. [Google Scholar] [CrossRef]
- Tian, Z.L.; Liu, Y.L.; Zhang, A.M.; Wang, S.P. Analysis of breaking and re-closure of a bubble near a free surface based on the Eulerian finite element method. Comput. Fluids 2018, 170, 41–52. [Google Scholar] [CrossRef]
- Mukin, R.V. Bubble reconstruction method for wire-mesh sensors measurements. Exp. Fluids 2016, 57, 133. [Google Scholar] [CrossRef]
- Wang, Q.; Jia, X.; Wang, M. Bubble mapping: Three-dimensional visualisation of gas-liquid flow regimes using electrical tomography. Meas. Sci. Technol. 2019, 30, 45303. [Google Scholar] [CrossRef]
- Sun, J.; Zhang, H.; Li, J.; Zhou, Y.; Jia, D.; Liu, T. Hybrid spherical particle field measurement based on interference technology. Meas. Sci. Technol. 2017, 28, 35204. [Google Scholar] [CrossRef]
- Boden, S.; Haghnegandar, M.; Hampel, U. Measurement of Taylor bubble shape in square channel by microfocus X-ray computed tomography for investigation of mass transfer. Flow Meas. Instrum. 2017, 53, 49–55. [Google Scholar] [CrossRef]
- Jamaludin, J.; Rahim, R.A.; Rahim, H.A.; Rahiman, M.H.F.; Muji, S.Z.M.; Rohani, J.M. Charge coupled device based on optical tomography system in detecting air bubbles in crystal clear water. Flow Meas. Instrum. 2016, 50, 13–25. [Google Scholar] [CrossRef]
- Lewandowski, B.; Ulbricht, M.; Krekel, G. An automated image analysing routine for estimation of equivalent diameter in high-speed image sequences with high accuracy and its validation. Exp. Therm. Fluid Sci. 2018, 98, 158–169. [Google Scholar] [CrossRef]
- Wang, E.N.; Devasenathipathy, S.; Lin, H.; Hidrovo, C.H.; Santiago, J.G.; Goodson, K.E.; Kenny, T.W. A hybrid method for bubble geometry reconstruction in two-phase microchannels. Exp. Fluids 2006, 40, 847–858. [Google Scholar] [CrossRef]
- Bian, Y.; Dong, F.; Zhang, W.; Wang, H.; Tan, C.; Zhang, Z. 3D reconstruction of single rising bubble in water using digital image processing and characteristic matrix. Particuology 2013, 11, 170–183. [Google Scholar] [CrossRef]
- Fujiwara, A.; Danmoto, Y.; Hishida, K.; Maeda, M. Bubble deformation and flow structure measured by double shadow images and PIV/LIF. Exp. Fluids 2004, 36, 157–165. [Google Scholar] [CrossRef]
- Zhang, T.; Qian, Y.; Yin, J.; Zhang, B.; Wang, D. Experimental study on 3D bubble shape evolution in swirl flow. Exp. Therm. Fluid Sci. 2019, 102, 368–375. [Google Scholar] [CrossRef]
- Fu, Y.; Liu, Y. 3D bubble reconstruction using multiple cameras and space carving method. Meas. Sci. Technol. 2018, 29, 75206. [Google Scholar] [CrossRef]
- Belden, J.; Ravela, S.; Truscott, T.T.; Techet, A.H. Three-dimensional bubble field resolution using synthetic aperture imaging: Application to a plunging jet. Exp. Fluids 2012, 53, 839–861. [Google Scholar] [CrossRef]
- Masuk, A.U.M.; Salibindla, A.; Ni, R. A robust virtual-camera 3D shape reconstruction of deforming bubbles/droplets with additional physical constraints. Int. J. Multiphas. Flow 2019, 120, 103088. [Google Scholar] [CrossRef]
- Di Nunno, F.; Alves Pereira, F.; de Marinis, G.; Di Felice, F.; Gargano, R.; Miozzi, M.; Granata, F. Deformation of Air Bubbles Near a Plunging Jet Using a Machine Learning Approach. Appl. Sci. 2020, 10, 3879. [Google Scholar] [CrossRef]
- Wang, H.; Xu, H.; Pooneeth, V.; Gao, X. A Novel One-Camera-Five-Mirror Three-Dimensional Imaging Method for Reconstructing the Cavitation Bubble Cluster in a Water Hydraulic Valve. Appl. Sci. 2018, 8, 1783. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Hu, M.; Ye, T.; Chen, Y.; Zhou, Y. An experimental study on the rheological properties of laponite RD as a transparent soil. Geotech. Test. J. 2020, 43, 607–621. [Google Scholar] [CrossRef]
- Zhang, Z.Y. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef] [Green Version]
- Xue, T.; Qu, L.; Cao, Z.; Zhang, T. Three-dimensional feature parameters measurement of bubbles in gas-liquid two-phase flow based on virtual stereo vision. Flow Meas. Instrum. 2012, 27, 29–36. [Google Scholar] [CrossRef]
- Supponen, O.; Obreschkow, D.; Kobel, P.; Dorsaz, N.; Farhat, M. Detailed experiments on weakly deformed cavitation bubbles. Exp. Fluids 2019, 60, 33. [Google Scholar] [CrossRef]
- Hamaguchi, F.; Ando, K. Linear oscillation of gas bubbles in a viscoelastic material under ultrasound irradiation. Phys. Fluids 2015, 27, 113103. [Google Scholar] [CrossRef]
- Okawa, T.; Ishida, T.; Kataoka, I.; Mori, M. Bubble rise characteristics after the departure from a nucleation site in vertical upflow boiling of subcooled water. Nucl. Eng. Des. 2005, 235, 1149–1161. [Google Scholar] [CrossRef]
- Kong, G.; Mirsandi, H.; Buist, K.A.; Peters, E.A.J.F.; Baltussen, M.W.; Kuipers, J.A.M. Oscillation dynamics of a bubble rising in viscous liquid. Exp. Fluids 2019, 60, 130. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Calibration Parameters | Calibration Results |
|---|---|
| [,] | [2618.40929 2663.82735] |
| γ | [0.00000] |
| kc | [0.33266 −0.52175 0.07873 0.08099 0.00000] |
| Calibration Parameters | Calibration Results |
|---|---|
| [,] | [2702.94005 2677.29985] |
| γ | [0.00000] |
| kc | [0.13499 −0.35469 0.00509 −0.07338 0.00000] |
| Bubble Shape | Sample No. | 2a (mm) | 2b (mm) | 2c (mm) | Volume (mm3) |
|---|---|---|---|---|---|
| Ellipsoid | 1 | 20 | 2 | 10 | 223 |
| 2 | 20 | 3 | 10 | 316 | |
| 3 | 20 | 5 | 10 | 549 | |
| 4 | 20 | 7 | 10 | 784 | |
| 5 | 20 | 9 | 10 | 946 | |
| 6 | 20 | 11 | 10 | 1113 | |
| 7 | 20 | 13 | 10 | 1321 | |
| 8 | 20 | 15 | 10 | 1623 | |
| 9 | 20 | 17 | 10 | 1825 | |
| 10 | 20 | 19 | 10 | 1997 | |
| 11 | 20 | 20 | 10 | 2079 | |
| Sphere | 12 | 16 | 16 | 16 | 2141 |
| Inverted teardrop | 13 | 15 | 15 | 32 | 2522 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Que, X.; Hu, M.; Zhou, Y. 3D Reconstruction of a Single Bubble in Transparent Media Using Three Orthographic Digital Images. Appl. Sci. 2020, 10, 5803. https://doi.org/10.3390/app10175803
Zhang Y, Que X, Hu M, Zhou Y. 3D Reconstruction of a Single Bubble in Transparent Media Using Three Orthographic Digital Images. Applied Sciences. 2020; 10(17):5803. https://doi.org/10.3390/app10175803
Chicago/Turabian StyleZhang, Yiping, Xinzhe Que, Mengxian Hu, and Yongchao Zhou. 2020. "3D Reconstruction of a Single Bubble in Transparent Media Using Three Orthographic Digital Images" Applied Sciences 10, no. 17: 5803. https://doi.org/10.3390/app10175803