Featured Application
The results of this study can be used in nondestructive quality inspection of serial parts by analyzing their eigenfrequencies via acoustic resonance testing. Representative and valid training data are mandatory to identify suitable acoustic test characteristics for each application of this method. With the given approach, a much more efficient way for generating appropriate training data is described compared to the usual procedure. Consequently, the novel approach suggested here allows us not only to save time and costs during a training procedure but also results in higher reliability when using acoustic resonance testing.
Abstract
Analyzing eigenfrequencies of serial parts by acoustic resonance testing enables an efficient nondestructive assessment of component quality or structural state. Usually, each application is based on experimentally acquired training data, which represent the typical natural vibration behavior of the component type to be inspected. From the training data, suitable test characteristics are identified according to the inspection objective. The experimental collection of training data, which involves selecting and characterizing numerous representing parts, is often associated with a great amount of effort. Instead, this work focuses on a simulation-based generation of synthetic training data. Within an application example, the eigenfrequencies of a set of virtual parts were calculated with FEM as a function of geometry. The resulting simulation values were adapted using empirical correction factors, which were derived from both calculated and measured eigenfrequencies of machine-made reference parts. The simulation-based data were finally used to form linear regression models within a training procedure. These models enabled the precise estimation of geometric dimensions of further machine-made parts using their measured eigenfrequencies as input data. The novel approach, which requires the experimental characterization of only a few real parts, can thus significantly reduce the effort associated with efficient and reliable acoustic resonance testing.
1. Introduction
Acoustic resonance testing (ART), also referred to as resonant or resonance inspection (RI), for example, is a nondestructive inspection method, see References [1,2,3,4,5,6,7]. It evaluates eigenfrequencies or other characteristic values derived from the measured natural vibration behavior of the parts to be inspected. ART is mainly used for 100% in-line inspection of serial parts that are manufactured in large quantities and with short cycle times. Some benefits to this method include the ability to test the entire component volume within seconds, moderate costs for test hardware, and good automation capability in contrast to other nondestructive testing (NDT) methods. Therefore, in contrast to image producing NDT methods like thermographic testing or scanning ultrasound methods, ART is a particularly effective and fast screening method. In addition, ART is an environmentally friendly procedure as no consumables are required. The method is especially suitable for metallic, for example, forged or cast, but also ceramic components. ART can be used to examine parts for various properties or quality deviations. Applications include testing for structural (surface as well as volume) defects like cracks or voids as well as analyses with regard to material mix-ups or microstructural irregularities.
Multiple specific ART applications or research can be found in the literature, even from the last decade. This shows the method’s wide application spectrum and its relevance. For example, there are works focusing on metallic automotive components and the detection of cracked parts with the help of intelligent classification methods [8,9]. For defect detection in metallic serial components, ART can be combined with further measured component information and used within an allover good-bad distinction [10]. Other works use ART for the characterization of ceramic tiles according to (mechanical) properties and processing parameters [11] or deal with the evaluation of metallic samples from a selective laser melting process by analyzing their vibration behavior [12]. ART was also used to investigate cast iron test samples with the aim to collect information about microstructural variations and to identify, for example, anomalies in graphite shape. Identification of heat treatment or other parameters from sample processing could also be achieved [13]. There are also works regarding other material classes like eigenfrequency analysis for damage detection within structures made out of composite materials [14,15]. Furthermore, ART was used for analyzing additive manufactured lattice structures [16] or for detection of glass bottles with defects [17]. There are also many works that deal with ART-like approaches for agricultural products such as fruits or eggs [18].
ART exploits the fact that the natural vibration behavior of a (free) body depends on its geometry, elastic constants, and density (since these are temperature-dependent, the natural vibration behavior is also a function of temperature). However, it is also influenced by various structural anomalies [19,20]. Thus, the eigenfrequencies of a component reflect both the mechanical properties and macroscopic defects such as cracks. The aim of ART is therefore either to identify defect components using measured eigenfrequencies or other acoustic signal characteristics or to classify parts according to quality-related mechanical properties, respectively. The procedure of a series-integrated ART application starts with the defined and reproducible active mechanical excitation of the test object. Therefore, the test object is usually positioned and supported at only a few points such that it can vibrate as freely as possible. Despite this, other boundary conditions are possible for ART measurements or ART-like research investigations [12]. Excitation is accomplished either by a mechanical pulse of a small automatable hammer or by a continuous vibration signal, for example, via one of the component’s supports, which is swept in frequency. In addition, vibration excitation by an airborne source or by dropping the component onto a stiff surface is possible [2]. The resulting vibration response is detected indirectly by a microphone via the emitted airborne sound or by contact detectors, which are, for example, connected to one of the part’s supports. A direct contactless measurement by a laser Doppler vibrometer is also possible [12,21], but this technology is especially useful as a reference method for experimental mode visualization [20,21]. The frequency range of the detectors must match the frequency range of the relevant eigenmodes of the inspected part. Depending on the physical dimensions and the objective of an ART application, the frequencies of interest are either in the audible acoustic range or in the ultrasound range (compare resonant ultrasound spectroscopy, RUS, [6,19]). Depending on frequency range, availability and application background, common experimental set-ups combine an impulse excitation with a microphone detection or a contact solution using a swept sine stimulation with a signal detection via the component supports [6,20]. Independent of the sensor technology, the vibration signals are digitized, recorded, and processed using various methods for signal filtering, signal transformation, or extraction of acoustic characteristics. Based on the recorded signal or characteristics derived from recorded data, such as eigenfrequencies, amplitudes, or attenuation values, a part is considered to be OK/defective or it is classified with regard to its structural condition. Regardless of the algorithms used, each ART test decision within a series production is based on an application-specific calibration or on a training procedure built on empirical data. Such a data set was generated via experiment beforehand using a large number of representative parts.
One challenge with ART is, however, that when inspecting for defects, each test result is to be understood in the sense of a conspicuity detection. Also, it is usually not possible to draw conclusions about the position, type, and size of a defect within a rejected part. Moreover, nominally identical test objects differ not only with regard to a possible defect or another target property of an inspection, but also as a result of tolerable part-to-part variations. These variations cause spectral shifts, which superimpose the acoustic test characteristics to be evaluated and thus have a negative impact on the reliability of ART. Within suitable training data, effects to be detected as well as tolerable variations should be included. For the experimental ART training data generation, a reliable, possibly expensive or complicated reference method for classifying representative serial parts is often necessary. Regarding defect detection and the collection of experimental training data, it can also be problematic that there is an insufficient number of representative defective parts, especially in a series production with low rejects. Furthermore, the influence of a defect on the eigenfrequencies depends not only on the type and size of the defect, but also on its position in a nonlinear manner [22,23]. In summary, generating experimental ART training data can be very difficult, extensive, time consuming, and cost intensive. This also entails disadvantages of ART with respect to design adaptations. Since even slight component modifications reflect in the natural vibration behavior, they require an update of the training procedure. If ART is applied to a new type of parts, data generation is required initially and therefore it is usually not possible to use ART synchronously with production launch.
In the field of acoustic testing (or even acoustic vibrations), extensive published information is available. NDT approaches that focus on the condition analysis of machines or plants by means of recorded vibration signals that occur during operation are not in the focus of this work. In fact, we limit the scope to the resonant vibration behavior of parts that follows of an active external excitation. There are many of basic studies regarding simple bodies and their natural vibrations in case of more or less strongly idealized structural defects or the inverse defect detection, for example, References [24,25,26]. Other works deal with the inverse quantitative conclusion on the material properties of geometrically defined samples by analyzing their natural vibration characteristics, for example, References [19,27,28]. However, practical effects like random component variations or metrological relevant perturbations are usually ignored and only simple geometries are considered. In contrast to other studies, the presented work understands ART as a NDT procedure for geometrically more complicated and practice-relevant serial parts and therefore takes aspects like tolerable component variations into account.
Finite element method (FEM) as a widespread simulation technique can help with general understanding and evaluation of a components natural vibration behavior, for performing sensitivity analyses regarding geometry or material properties, or to analyze the influences caused by defects [8,21]. A quantitative good match of FEM results compared to ART measured frequencies can, in principle, be reached by FEM calculations if the component’s geometry and material properties are sufficiently known [20]. A few publications deal with the effects to the resonance spectra caused by defects or due to small tolerable component variations [22,29]. Some ideas for the algorithmic differentiation between those effects are described. FEM data were used for demonstration. Some further publications deal with the influences caused by structural defects or stiffness changes as a function of the position. Corresponding correlations represented by FEM data were used to draw conclusions about the type and position of a defect on the basis of a given set of eigenfrequencies [30,31,32]. Within these studies, exclusively numerically calculated frequencies were used for the investigations.
This study focuses on the simulation-based generation of representative and valid ART training data. This means that the work counteracts the challenges connected with the conventional and purely experimental generation of ART training data, as mentioned in several publications like References [20,30,31,32] and which is a limiting factor for the method. The benefit of FEM for estimating the effects of component variations and defects even in a quantitative satisfying manner, as noted in References [8,20,21], indicates the principle possibility of a simulation-based generation of synthetic ART training data. Aspects like the distinction between the influences of defects from those of tolerable variations, which is addressed in References [22,29], or the inverse detection of defects including different positions, which is mentioned in References [30,31,32], are relevant points. They could also be considered within a generation of synthetic ART training data if necessary for a specific application. However, the mentioned works from other authors used simulation data for demonstrating their approaches and the authors point out that further research is needed, for example, regarding effects like random part variations, the purposeful use of simulation data, and other practice-relevant effects. Therefore, our approach is not only described in detail or discussed theoretically. It is also verified by means of manufactured parts and measured data, as there is no concept or demonstration of a simulation-based ART training data generation within literature. Regarding our idea in general, ART training data have to be representative and valid to reach meaningful and trustful ART results. This means that the data should represent the natural vibration behavior for a considered part type in a quantitative, realistic way. The data should reflect effects like random geometric or material variations, which occur from part to part within a series production. Furthermore, a synthetic data set should cover reality precisely without gaps. It should also be generatable with minimum effort. These aspects are contradictory to each other especially for exclusively experimental data.
In this manuscript, a simulation-based generation of representative and valid ART training data is addressed. Section 2 describes the part type regarded exemplary for the study. Machine-made parts are introduced and sample characterizations are explained. Section 3 deals with the differences between measured eigenfrequencies of selected machine-made reference parts and associated values generated by FEM. The findings are used to achieve most realistic synthetic eigenfrequency data via simulation. This is verified by a blind test using further machine-made parts. In Section 4, our approach is demonstrated by estimating machine-made parts’ actual geometry using their measured eigenfrequencies, which serves as an application example for evaluating sample state via ART based on synthetic training data. Section 5 summarizes the results and gives further research requirements. In case that any reader would like to use the values illustrated in our data diagrams (Figures 4–11), we have provided them as Supplementary Materials.
2. Part Type, Machine-Made Parts and Experimental Characterizations
For the study, connecting rods were selected. This model-like part type is shown in Figure 1. If symmetrical with respect to the x-y as well as the x-z plane but without further restrictions, the geometry can be quantified with 10 independent geometric parameters. Both rotationally symmetrical cylinder rings are described with the inner diameter or , the outer diameter or and the height or , respectively. The cuboidal bar area is defined by the width and the height . The length of the bar is fixed via , which is the distance between the cylinder rings’ axes. There are also four edge fillets, which have the unique radius r. The material is chosen to be homogeneous with linear-elastic behavior. Thus, assuming low damping, each connecting rod is a mechanically deformable, vibrational system, which is characterized by typical vibration modes, that is, eigenmodes, and associated eigenfrequencies depending on its exact component structure.

Figure 1.
Geometric model of a connecting rod including geometric parameters.
With the defined geometric model, we generated numerous specific parts, namely thousands of virtual parts as well as real machine-made parts. The virtual parts exist as computer models. Within the investigations, they were used as separate, independent objects of investigation or served as digital twins of the real parts. An important factor for the demonstration within this work are purposefully given part-to-part variations regarding the exact geometric dimensions. An identical but component-specific value for the two cylinder ring heights and , as well as a constant value of 3 for the edge radii were specified. Thus, only 8 individual geometric dimensions were used for initial geometric generation of the virtual parts. In the same way, each real part was produced according to an individual set of 8 specified parameters. By default, unless otherwise specified, a consistent geometric model using also 8 individually updated geometric dimensions according to measurement data was selected as a virtual representation of each real part.
Stochastically independent, either normally or uniformly distributed, random variables or random numbers were used for describing small geometric variations from part to part. To create suitable random numbers corresponding to the 8 geometric parameters, Table 1 was taken into account. In case of normal distribution, the mean value corresponds to the expected value and the scatter value corresponds to the standard deviation of the random variable, respectively. For a normal distribution, approximately % and thus almost all values deviate by a maximum of three standard deviations from the expected value. Therefore, the interval borders of the corresponding uniform distribution were set to the mean value plus or minus three times the scatter value. This rule, together with the chosen scatter values as given in Table 1, describes linear geometrical dimensions or essential value ranges that are usually covered by the accuracy class c (coarse) or v (very coarse) of the general tolerances according to DIN ISO 2768, compare Reference [33]. Such variations in geometry are considered still realistic, especially in the case of unfinished blanks from a forging or casting process.

Table 1.
Mean value and scatter value for the generation of specific geometric dimensions of a connecting rod via random numbers depending on the geometric parameter.
The eigenfrequencies and eigenmodes of the virtual parts were assessed numerically with the FEM software COMSOL Multiphysics (basic software functionality and Structural Mechanics Module, software version 5.2a) supposing perfect linearity. Thereby, quadratic 3D tetrahedral elements with a maximum size of were used, damping effects were ignored, and each part was chosen to be completely free. As standard for the material during simulations, a density of 2700 / as well as an isotropic elasticity with a Young’s modulus of 70 and a Poisson ratio of 0.34, resulting in a shear modulus of approx. , were assumed, which is typical for an aluminum alloy.
Figure 2 shows calculated eigenmodes, including associated eigenfrequencies of a virtual part, taking the example of a geometrically mean connecting rod, that is, to each geometric parameter the associated mean value from Table 1 was assigned. It can be seen that various eigenmodes with bending, torsional or longitudinal characteristics exist. They are labeled as Mode-1, Mode-2, … according to the order of the frequencies of the geometrically mean part in ascending order. As per simulation, 18 eigenmodes up to around 30 exist, which can also be observed on machine-made parts with the help of laser Doppler vibrometry. However, depending on the mode under investigation, the associated frequency varies in a specific way according to geometric changes. Thereby, positive or negative correlations can be observed as well as slightly nonlinear correlations for larger geometric changes and interactional effects. Finally, due to the individual structure being different for each random set of geometric parameters, the eigenfrequencies are individual for a part and the modes may occur in another order compared to the geometric mean part. Within this paper, eigenfrequencies sorted by identified modes (and not by ascending frequencies) are used. It may be of interest that in a population, in which geometric dimensions vary normally distributed using the scatter values as described, the observed mean frequency values are very close to the values of the mean part given in Figure 2. The coefficients of variation are in the range of less than 1% to more than %. The eigenfrequencies vary according to normal distributions too, but different frequencies are often strongly correlated rather than being independent. In case of uniformly distributed parameter variations, the obtained frequency distribution is neither uniform nor normal and the coefficients of variation are significantly larger compared to the values observed for normal distributed geometric variations.
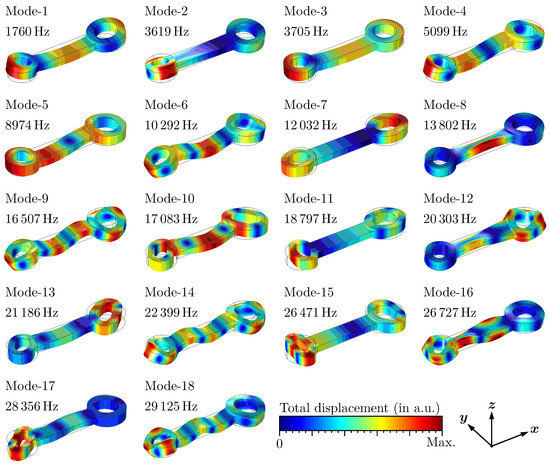
Figure 2.
Eigenmodes and eigenfrequencies up to 30 of a connecting rod assuming mean geometry and standard material obtained by finite element method (FEM) simulation using specified settings. Qualitatively identical modes are the basis for measurements with acoustic resonance testing (ART).
For the investigations, a total of 29 real connecting rods were considered. They were manufactured by modern high quality machines according to the model as described. For 5 parts, which are referred to as reference parts, the identical mean geometry was set as nominal geometry. An additional 24 consecutively numbered parts assuming random geometry were defined. These parts are termed as validation parts within the article. Their nominal dimensions were set with 8 independent random numbers as described above, assuming the scatter values from Table 1 as well as identical but random cylinder ring heights and constant edge radii of 3 . The parameters of the parts with numbers 1 to 12 are based on a normal distribution, which can typically be used to describe manufacturing tolerances. For the parts with numbers 13 to 24, uniform distribution was used, for which more extreme values are more likely. For better handling, the nominal values were rounded to integer multiples of . In addition, for some parts (no. 8 to 12 and no. 20 to 24), a single dimension was manually manipulated in each case. This should achieve a geometric value outside the usually expected interval of three times the scatter value from the mean value. According to the geometric specifications, all parts were machined from a single batch of rolled 6082 aluminum alloy (which is also commonly referred to as material no. 3.2315, AlSi1MgMn or AlMgSi1) using a consistent production strategy to reflect a reproducible series process. In addition, various cuboidal material samples were cut out of the raw material. They were produced for material property investigations.
After manufacturing, the parts were characterized with multiple methods. Hereby, two aspects were considered for quantitative information such as actual geometry, material characteristics, and eigenfrequencies. Temperature was recorded consistently, whereby values between and 25 were observed. With the help of a linear model and suitable temperature coefficients based on literature or experiments, temperature effects were eliminated or derived characteristics were corrected to a temperature of 20 . Regarding measured eigenfrequencies, for example, sample temperatures between and 22 were registered indirectly via air temperature. Former experiments with the help of a climatic chamber showed a frequency decrease in the magnitude of a quarter per thousand due to a temperature increase of 1 for the real connecting rods. Single outliers were also identified and eliminated with a proper rule. Both of these aspects regarding temperature and outliers should ensure a high data quality and minimize perturbation effects as far as possible.
The machine-made connecting rods were measured geometrically in order to precisely identify the actual dimensions, which inevitably differ from the specified nominal geometry. For this, a coordinate measuring machine was used. Only the edge radii were analyzed manually via a radius gauge. The measured data were finally applied to three geometric models with increasing level of complexity, that is, increasingly realistic models. The first model, which was mentioned before and is addressed as standard unless otherwise stated, uses 8 individually updated dimensions per part. It includes an averaged and identical value for both cylinder ring heights and a nominal value of 3 for the edge radii. The second model with 10 individually updated dimensions uses individual values for the two cylinder ring heights as well as measured edge radii. The third model, which has 17 individual geometric values per part, also takes into account additional geometric parameters with which deviations of the primitive geometry elements from perfect symmetry or idealized form can be represented. The surface quality of the manufactured parts was not measured quantitatively. However, a visual inspection using specular reflections showed that the surfaces are of high quality with minor machining marks corresponding to a milling fine machining with modern equipment.
Density measurements were made at several material samples from different regions of the raw material following Archimedes’ principle. A homogeneous density of slightly more than 2705 / was found with a negligible uncertainty in the range of only a few per thousand.
Ultrasound time-of-flight measurements (longitudinal as well as transversal waves, 5 each) using suitable samples indicated slightly anisotropic elastic properties for the rolled raw material. Nevertheless, mean isotropic properties were calculated from ultrasound data by averaging. As a result, values of approximately and were found for Young’s modulus and shear modulus. Elastic constants for an orthotropic material were also derived. Because the obtained ultrasound data could not provide a full set of 9 elastic constants of an orthotropic model, averaged values assuming isotropic behavior were used as a substitute for some constants. Apart from that, some values were averaged as time-of-flight deviations between ultrasound signals were observed, which should have been identical according to theory. This indicated that the orthotropic model has to be understood as an approximation too. An analysis showed that the time-of-flight values could vary in the order of 1% depending on the reference used within consecutive backwall echoes. Therefore, the derived values of the elastic constants can be assumed as uncertain up to 2%.
The eigenfrequencies of the manufactured parts were measured by ART. The part to measure was placed on three rubber tips, a manual impulse hammer was chosen for excitation, and a microphone was used for signal acquisition. Excitations at different points in order to excite all relevant vibration modes were carried out. Again, the eigenfrequencies were sorted to the order of the identified eigenmodes as shown in Figure 2. For this, mode visualization for one real part using a laser Doppler vibrometer was taken as a basis. Additionally, calculated frequency values of associated virtual parts as well as amplitudes from ART data depending on excitation were evaluated for mode identification. In total, a minimum of 10 and a maximum of almost 100 single measurements were performed for each part to enable appropriate statistical data evaluation including outlier detection. The frequencies were averaged for each part resulting in 18 experimental eigenfrequency values in total per part.
The machine-made connecting rods as well as some material samples were analyzed with X-ray technology to detect any possible inner anomalies. Direction-dependent patterns were found, which are probably due to a rolling texture caused by the raw material processing. This confirms the anisotropic elasticity found by ultrasound. No further irregularities were detected within the measurement sensitivity of to . In summary, even after careful individual comparison, no significant differences regarding the structure of the machine-made connecting rods could be detected. Figure 3 shows the X-ray images of three reference parts, including the mentioned patterns.

Figure 3.
X-ray images of three machine-made reference parts (different gray value scaling according to the different thickness with respect to the bar region and the cylinder rings).
From the experimental findings, virtual parts were defined as digital twins of the machine-made connecting rods. This involves considering several detail levels regarding geometry and material properties. The eigenfrequencies of those virtual representations were calculated approximately using FEM, taking into account various idealizations. As a result, corresponding simulated frequencies are available in addition to the measured eigenfrequencies of the machine-made parts.
3. Comparative Analysis of FEM-Calculated and ART-Measured Eigenfrequencies
Our approach regarding ART training data requires representative and valid simulation data. This means that simulation data should be reliable compared to corresponding measured values and, as far as possible, without systematic deviations. To ensure this, an understanding of the deviations of simulated eigenfrequencies to measured frequencies and an optimization of simulation models or data is needed. For the paper’s application example, the eigenfrequencies of the 5 machine-made reference parts measured by ART as well as the eigenfrequencies of the corresponding virtual representations simulated by FEM are considered within the following. Starting with the differences of simulation to measurement assuming nominal geometry and literature material properties, it is evaluated whether effects within the acquisition of eigenfrequencies are causal for the observed discrepancies. Then, potential model errors are analyzed step by step, that is, approximations and their limitations due to applied idealizations within simulations are addressed. Finally, a strategy to match the simulation model to reality, that is, to obtain simulation values as close as possible to measured data, is established. This strategy is validated using the machine-made validation parts.
3.1. Status Quo: Differences in Eigenfrequencies When Applying a Low Model Accuracy for Simulations
The measured eigenfrequencies of the reference parts were taken as a basis. They were compared to the simulated eigenfrequencies of the corresponding virtual representations assuming a low level of model accuracy. This means that simulation data were used, for whose generation both the nominal geometry with 8 parameters and literature material properties were used. Figure 4 shows the relative deviations from simulation to measurement separately for each part. The deviations are approximately in the range from % to % depending on the vibration mode, that is, simulated eigenfrequencies are up to almost % smaller compared to measured frequencies. This level of error is significant and not negligible in the context of suitable ART training data, since the effect of structural defects or other features to detect with ART can be much smaller by amount. Therefore, further investigations are presented in the following subsections aiming at synthetic training data that are more precise compared to experimentally acquired training data. Since the results are similar for all reference parts, averaged deviation data will be shown in the following figures.
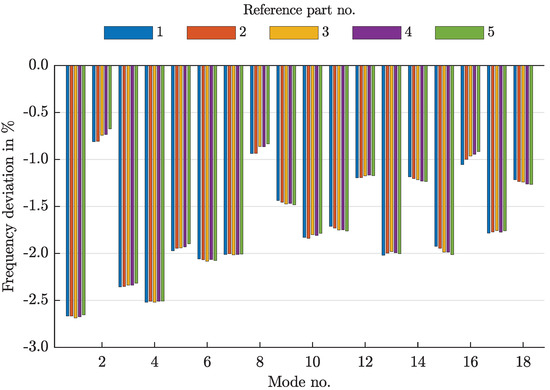
Figure 4.
Relative deviations between eigenfrequencies of virtual representations simulated by FEM using a low model accuracy and eigenfrequencies of the machine-made reference parts measured by ART depending on vibration mode (individual values for each reference part).
3.2. Uncertainties and Errors of Eigenfrequencies Due To Data Acquisition Procedures
The data acquisition procedures used, which means ART measurements and FEM calculations, lead to eigenfrequencies that may be affected by uncertainties or errors. The differences of simulated frequencies to measured values shown previously in Figure 4 are analyzed in this respect.
The observed deviations from simulation and measurement are almost equal for all reference parts. This already indicates that random variations due to the acquisition procedures are not primarily causal. Furthermore, repeated ART measurements, as well as repeated FEM calculations (assuming physically irrelevant geometric variations to induce slightly different meshes), indicate that random effects cannot be responsible for the observed differences since the repeated acquisition procedures resulted to coefficients of variation in the magnitude of less or much less than %. Moreover, all results mentioned in this section are based on multiple averages of both simulation and measurement data. Therefore, random effects are in any case significantly suppressed and play no role.
Systematic influences may also affect eigenfrequencies. Measured frequencies may be influenced by various parameters regarding measurement techniques, experimental set-up, and strategies for data evaluation. These aspects are not represented by physical simulation modeling. They are therefore considered in the sense of modeling errors within the next subsection. Of course some aspects, for example the limited measurement resolution or uncertainties within temperature compensation, could influence measured eigenfrequencies slightly in a systematic way. But as such effects are considered to be minor, experimentally acquired eigenfrequencies can be seen as free of systematic errors from a practical point of view. In contrast, a convergence study showed that the FEM eigenfrequencies decrease with smaller element size. This is visualized in Figure 5, taking two modes as examples. All convergence data was extrapolated to obtain theoretical expected values at 0 . These were compared to the frequencies achieved when using the standard mesh size of . In Figure 5, we used a linear function for Mode-1 and a quadratic function for Mode-2 for extrapolation due to the phenomenological behavior. Additionally, we only used the mesh size up to 2 since this range shows a relatively consistent trend. However, any dependence from the extrapolation procedure to the values expected at 0 mm is not essential for a general assessment of the convergence situation. The evaluation of the convergence data led to the result that the amount of the effect clearly depends on the mode, but the influence of the element size is ever smaller than one or two per thousand.
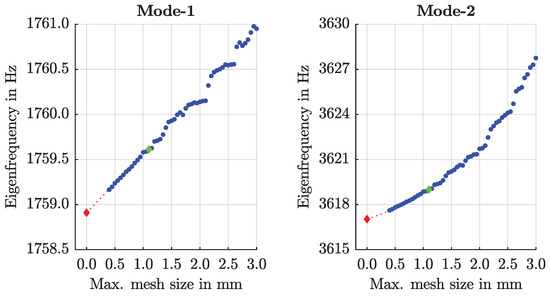
Figure 5.
Dependence of the eigenfrequencies from the maximum element size used for FEM regarding Mode-1 and Mode-2 of a virtual connecting rod with mean geometry (green point: standard mesh size of ; red dotted line and point: extrapolated behavior and expected value at 0 ).
In summary, we can conclude that neither uncertainties nor systematic errors within the data acquisition procedures are causal for the observed differences from simulation to measurement data. Therefore, the deviations shown in Figure 4 are due to aspects that were neglected during simulations or represented in an inaccurate way. Such model errors are addressed in the next subsection.
3.3. Step-by-Step Analysis of Modeling Errors of Simulated Eigenfrequencies
Certain deviations of simulated versus measured data are always to be expected, that is, also in the present case with regard to eigenfrequencies. This is due to idealizations, simplifications, and only approximately valid model assumptions used for simulation. Following the analysis in Section 3.1 with the rough model, updated simulation data were analyzed step by step. For data generation, an increasingly complex modeling with regard to geometry or material was assumed.
Figure 6 shows again relative deviations of simulation data compared to eigenfrequencies from measurement. Geometric models with different levels of accuracy were used for simulations, namely nominal geometry, standard model with 8 as well as models with 10 or even 17 individually updated geometric values, as explained in Section 2. Amount related error bars of up to almost % for simulation data compared to experiment can be seen in Figure 6. A stepwise increase in complexity of the geometric modeling results in only slightly different eigenfrequency values up to the model with 10 individually updated geometric values. A further increase in complexity by assuming additional parameters does not lead to any significant improvement, according to our findings.
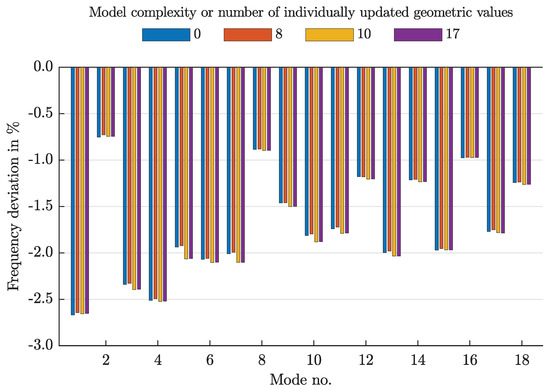
Figure 6.
Relative deviations between eigenfrequencies of virtual representations simulated by FEM using different geometric models and eigenfrequencies of the machine-made reference parts measured by ART depending on vibration mode (averaged values from all reference part).
Even the use of the most complex model with 17 updated values does not imply that geometry was already described exactly. It has to be considered that geometry assumed for the simulations has only been measured at local areas of the components. Also, the data are subject to measurement uncertainty effects and the real geometry is reduced from measurement raw data to an idealized parameterizable model with idealized shape. However, there are only small changes associated with an increasingly complicated geometric model. Therefore, it is concluded that the observed differences between simulation and measurement are only to a small extent due to an insufficiently accurate geometric modeling and the potential for improvement is low.
The FEM calculations within this study were carried out under numerous simplifications as well as idealizations. Besides the assumption of a completely linear behavior and the neglect of damping or external forces, many aspects were ignored in eigenfrequency simulations that happen in reality, for example, the characteristics of the ART measurement device as well as the chosen experimental set-up or effects from the signal processing strategy. Therefore, some exemplary analyses using different experimental set-ups and different measurement technology as far as available were performed. This investigations indicate small, insignificant influences to measured eigenfrequencies. In general, the mentioned aspects cannot easily be quantified at this point in most cases, but there is no indication that the differences between simulated and measured eigenfrequencies within the observed magnitude are mainly caused by these neglected or idealistic conditions.
Furthermore, material properties have to be taken into account as another modeling parameter. By default, a homogeneous and isotropic material with properties according to literature was assumed for simulation. Beyond that, two further material models were assumed, either a model with averaged isotropic material properties or an orthotropic model. The elastic constants of both models were derived from density and ultrasound time-of-flight measurements. Figure 7 shows results regarding material based on the standard geometric model with 8 individually updated geometric values. It can be seen that the differences between the calculated eigenfrequencies of the virtual representations and ART measured data can be strongly reduced by updating the material model for FEM simulations. For the three models assumed, the averaged difference between simulation and measurement has a value of approx. %, % and % by amount. It is also worth mentioning that the range of the error bars can be reduced from almost 2% to less than 1% when using the orthotropic model.
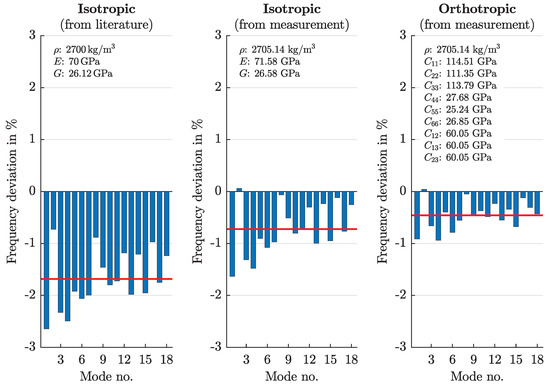
Figure 7.
Relative deviations between eigenfrequencies of virtual representations simulated by FEM using different material models and eigenfrequencies of the machine-made reference parts measured by ART depending on vibration mode (averaged values from all reference part; red line: overall average; : density; E and G: Young’s modulus and shear modulus; to : orthotropic elastic constants).
Still, significant deviations can be observed regarding the simulation data, even with the improvements due to the updated material properties. This is explained due to numerous idealizations and a quite high degree of uncertainty in the elastic constants. Regarding the experimental procedure for material characterization, including many assumptions and simplifications, a more elaborate procedure and other material models could lead to more realistic material data. Therefore, there is some further potential for improving the differences from simulation data to measured eigenfrequencies. Of course, the results regarding material vary when using a geometric model with higher accuracy. However, the effect is not decisive since geometry updating showed only small influences.
As a conclusion, the differences between simulated and measured eigenfrequencies are due to a combination of many influences. A part of them cannot be quantified or only with non-representable effort. Therefore, it must be noted that a physical-based model updating seems to not be suitable to reach an appropriate accuracy for simulated eigenfrequencies. There will always be many aspects that cannot be modeled with a reasonable effort or parameters which are in principle not accessible, for example, regarding geometry, material properties, damping effects, or other practice-relevant influences. Hence, irrespective of the effort involved, a physical-based model update will eventually reach its limits. Therefore this does not seem reasonable for a transfer into practice. That is why we use a more pragmatic model-like approach to reach valid simulation data close to measured data.
3.4. Strategy for Adapting the Virtual Model to the Real Part
As mentioned, we selected a more pragmatic approach than a physical-based model update in order to generate virtual ART data that reflect measurement data in a trustful way. For the connecting rods, in detail, correction factors were determined for each vibration mode separately from the measured eigenfrequencies of the 5 reference parts and corresponding simulated frequencies. Regarding Mode-1, for example, we observed an averaged frequency value of approximately from ART. The corresponding frequency value from FEM simulation is approximately . Dividing the measured value by the calculated value leads to a quotient of about 1.0272, which is the correcting factor regarding Mode-1 since the factor’s product with the simulated eigenfrequency results in a valid estimation for the measured frequency value. Regarding all 18 vibration modes, correction factor values in the range of 1.0073 to 1.0272 were found by fitting simulated eigenfrequencies to measurement. Only as a reminder, for FEM simulations, our standard modeling regarding sample properties as described in Section 2 was used, that is, among others the geometric model with in each case 8 individually updated geometric values and material properties from literature were assumed.
Such a simple adaptation of simulation data to measurement is assumed to be suitable for the application example and possibly also for practical applications. Besides this, other statistical methods or models could be used depending on requirements and circumstances, of course. The advantages of such a pragmatic strategy are obvious. There is no need for complicated physical modeling and effects like batchwise changes can be considered without extensive numerical re-calculations.
3.5. Validation of the Selected Model Adaption Strategy
The adaption of the simulation model to measurement is demonstrated with the help of the 24 machine-made validation parts, which have not been included so far and are therefore to be regarded as unknown parts used within a blind test. The eigenfrequencies of the virtual representations of these parts were initially calculated by FEM simulations assuming our standard geometry and material according to Section 2 once again. The resulting frequency values were fitted with the help of the correction factors derived from the reference parts as described in the previous subsection.
For validation, the synthetic eigenfrequencies were compared with the values accessed via ART from the manufactured parts. Figure 8 shows the relative differences of the adapted simulation values compared to ART data. The values from the virtual model fit very well to the measured values. The differences are less than % in nearly all cases. Mostly they are even smaller than %. Larger deviations were only detected for the parts no. 2, 8, and 20 with mode-specific deviations showing a similar pattern as can be seen in Figure 8. Even for these parts the maximum deviations are not much larger than %. Due to the good match, it is concluded that synthetic eigenfrequencies first generated via simulation techniques and then corrected multiplicatively are suitable for our application example and could be used successfully for an ART training procedure.
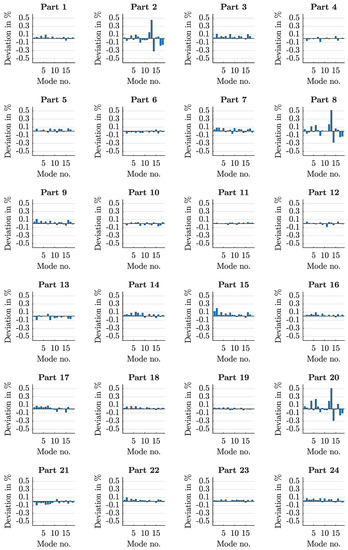
Figure 8.
Relative deviations between eigenfrequencies of virtual representations initially simulated by FEM and then adapted using correction factors and eigenfrequencies of the machine-made validation parts measured by ART depending on vibration mode (individual values for each validation part).
4. Demonstration and Validation of the Simulation-Based Generation of ART Training Data
As a final step, our novel approach of a simulation-based generation of representative and valid ART training data and its application are demonstrated in practical use. For this, the 24 machine-made validation parts, which were not considered for any previous modeling, were used within a blind test. Our application example aims at extracting the actual geometry of those produced validation parts. For each part, the 18 individual eigenfrequencies up to approx. 30 measured by ART served as input data for geometry evaluation. To determine the geometry information from the eigenfrequencies of a connecting rod, we postulated the easy relationship given in the following equation.
This formula has to be regarded in a mathematical and not in a physical sense. It describes any geometric dimension, which is denoted symbolically by y and which should be calculated approximately from a constant as well as the products from the coefficients and the eigenfrequencies . For each separate geometric parameter, we ultimately used the formula as a linear regression model. The constant and coefficients were calculated using the synthetic training data mentioned in the following paragraph as input with the help of the method of least squares. For specific implementation of the fit, we used MATLAB and its function fitlm (fit linear regression model). However, many software provide similar functionality for performing such regression model fitting. Such an idea of an eigenfrequency-based geometry estimation has already been discussed by the exclusive use of simulated data [34,35]. However, for the first time within a manuscript, this method is transferred to experimentally measured eigenfrequencies of real existing parts.
The generation of synthetic ART training data was first carried out using random numbers and FEM simulations. The eigenfrequencies of in total 5000 virtual training parts were calculated as a function of random geometric variations assuming 8 independent geometric parameters. A homogeneous and isotropic material according to literature as well as the simplified assumptions such as disregarding damping and support loads, as discussed in the previous chapters, were considered. For random number generation, the procedure described in Section 2 and the scatter values given in Table 1 were used, whereby uniformly distributed random numbers were used to describe the specific dimensions of the parts and the scatter values were each scaled upwards by a factor of 1.5. In this way, for each geometric parameter of the virtual training parts, a value range increased by 50% in comparison to the unscaled range or to the range of the machine-made connecting rods is described. This scaling is intended to ensure that training parts (and thus the training data) should always cover the geometric properties of the machine-made connecting rods, which vary normally or uniformly in a smaller geometric range. The uniform distribution is chosen to ensure that no subrange of the trainings data’s values would be weighted with a higher probability than another.
In a first step within our training and validation procedure, no adjustments regarding the calculated frequencies of the virtual training parts or any other optimization regarding training data generation were implemented. For each geometric parameter, a function, which describes the dependence of a part’s geometric dimension on its individual eigenfrequencies, was determined by regression analysis. For validation itself, the (measured as well as simulated) eigenfrequencies of the validation parts were inserted into the determined regression equations in order to calculate or estimate the parts’ individual dimensions. Figure 9 shows the results regarding parameter . The use of simulated eigenfrequencies as a reference leads to reasonable estimates of the diameter, which correspond very well to the measured dimensions. However, for measured eigenfrequencies, the estimated values are shifted by an offset. This is due to the fact that the training procedure was carried out with initial simulation data assuming many simplifications and idealizations and without any previous optimization of simulation models or adaption of training data to measurement.
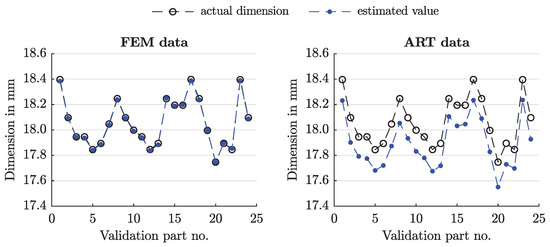
Figure 9.
Results of the eigenfrequency-based estimation regarding geometric parameter based on synthetic, simulation-based training data without adaption to measurement.
In a second training and validation step, the determination of the regression functions was repeated after the simulated training data set was adapted to measurement using the correction factors. The revised results using the eigenfrequencies of the validation parts are shown in Figure 10. They once again refer to geometric parameter . Beneath the results derived by including measured eigenfrequencies within the updated regression function, results using simulation data are shown as reference (for the reference results, it is irrelevant whether the training data as well as the validation data both are left unchanged or both are adapted multiplicatively using the same correction factors). After updating, a very good agreement between the values estimated by the regression function based on measured eigenfrequencies and the actual dimensions can be seen. Figure 11 shows further analogous results for geometric parameter . Again, results considering a training data adaption for measured eigenfrequencies, and exclusively virtual results as reference, are visualized.
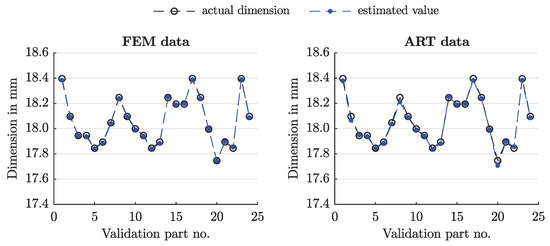
Figure 10.
Results of the eigenfrequency-based estimation regarding geometric parameter based on synthetic, simulation-based training data including adaption to measurement.

Figure 11.
Results of the eigenfrequency-based estimation regarding geometric parameter based on synthetic, simulation-based training data including adaption to measurement.
We performed the analyses for all 8 geometric parameters and evaluated the results by Pearson correlation coefficient, since no relevant systematic deviations or offset could be seen in the diagrams. This coefficient measures the linear relationship and takes values near 1, the more similar the actual dimensions and the estimated values are (assuming no other complicated relationship). We found values of 0.998 and 0.995 for the correlation coefficient regarding and . In general, we found only one value for the correlation coefficient much worse than 0.97 (around 0.945 regarding parameter ). Therefore, the procedure using synthetic training data showed very satisfying results.
The findings above confirm that ART training data generated mainly by simulation techniques in combination with only a few real parts can yield very satisfying results. It should be emphasized that only five real parts were used as reference or for adjustment for the application example, whereas the conventional approach with an experimentally generated data set would have required the metrological characterization of dozens or hundreds of parts. The geometry estimates determined using measured eigenfrequencies deviate only slightly more from the actual geometric values than associated estimates based on simulated frequency values. Overall, very satisfactory results were obtained using the machine-made parts’ measured eigenfrequencies.
It is worth mentioning that within a series production there may be effects like variations in material properties due to different batches. This is essential for an ART application, because such changes may be reflected in the natural vibration behavior and would normally require a renewed training procedure or a new training data generation. The presented simulation-based approach is advantageous here. For the application example demonstrated above, instead of a totally new generation of training data, our novel approach allows easy (e.g., multiplicative) re-adjustments.
In total, with these positive validation results, it is concluded that the novel approach is a suitable procedure requiring the experimental characterization of only a few real reference parts and which significantly reduces the effort associated with efficient and reliable acoustic component testing. Of course, our approach is not limited to the estimation of the geometry of samples, which was used as an application example within this study. Moreover, synthetic training data could be used in any ART application as mentioned in the following conclusion. Regardless of the specific application, synthetic data generated with the help of simulations are linked with many advantages. Simulation techniques can help to significantly reduce the experimental effort regarding an ART training procedure for any ART task. It is possible to react quickly to batch influences, or the scatter ranges of training data can be selected wide enough to cover batch jumps. In addition, it is also possible to react quickly to design changes of components or to create a data basis for acoustical quality inspection even before series production is launched. In principle, synthetic training data also allow for the application of more complicated and maybe more powerful analysis algorithms due to the potentially huge amount of simulation data compared to experimental data collection. The novel approach is particularly useful in cases where considerable deviations can occur between fundamentally identical parts, for example, with regard to the exact geometry of forged or cast blanks. The simulation approach is advantageous in practical applications where insufficient representative parts are available for an exclusively experimental training procedure. This is often the case for defect detection by means of ART, since it can be assumed that defective parts occur only rarely within a series production and can only be detected with large effort. In summary, our approach could not only reduce the effort for ART applications significantly, but also help to increase the reliability of ART and open up new applications that could not be addressed profitably or in a technically viable way so far.
5. Conclusions and Outlook for Acoustic Resonance Testing
In this article, a novel approach regarding a simulation-based generation of representative and valid training data for an efficient and reliable ART is presented. For demonstration, we chose a model-like part type and considered tolerable part-to-part variations regarding geometry. To show the validity of our approach, we used synthetic training data to create models, which served to estimate the actual dimensions of machine-made parts based on measured eigenfrequencies. In general, our approach aims at the synthetic generation of a data set that represents the relevant physical correlations via numerous virtual training parts. Such data must contain the eigenfrequencies of the virtual parts. Also, the data set must be tailored to the characteristic properties of the parts with respect to the target of the ART application. Of course, the training parts must be representative regarding mechanical structure, part-to-part variations, or target properties. Training data initially acquired via simulation techniques using physical models can be adapted to measured data within a subsequent step, for example, with statistical methods. This enables to achieve valid training data in a quantitative manner and to eliminate inevitable, systematic deviations caused by idealizations and simplifications during simulation. The synthetic training data can be used for an ART training procedure as usual and analogous to a database acquired with measurements. Although we considered a homogenous group of undamaged parts with variations in geometry in this study and our target quantity was geometry as well, the idea of simulation-based training data generation can be transferred to other applications. For example, synthetic training data including good as well as cracked parts could be used for defect detection. Additionally, geometric or material variations could be considered as tolerable.
Further research for ART is still necessary. Some investigations for developing suitable procedures in the field of applied Artificial Intelligence (AI) for evaluating acoustic noise and vibration signals have been performed by our group. These will be published separately. In addition, the presented idea of a simulation-based training data generation should be transferred to serial parts in an industrial environment as well as to real ART applications. The stability of the method with respect to practice-relevant challenges like data availability, perturbations, or sudden batch effects will have to be examined. Regarding the detection of parts with structural damage like cracks, the generation of appropriate training data by simulation techniques is not trivial, amongst others due to nonlinear defect effects. To address this, a method is currently being developed that does not consider the physical influence from a defect. Instead, it uses individual a-priori component information to achieve optimized detection of conspicuous parts. This work will be published in the near future.
Supplementary Materials
An Excel file is available at https://www.mdpi.com/2076-3417/10/17/6059/s1. This file contains all data points used in the data diagrams, which means Figure 4, Figure 5, Figure 6, Figure 7, Figure 8, Figure 9, Figure 10 and Figure 11. The data regarding each figure or diagram is documented within an separate sheet of the Excel file.
Author Contributions
Conceptualization, M.H., U.R. and B.V.; methodology, M.H.; software, M.H.; validation, M.H., U.R. and B.V.; formal analysis, M.H. and U.R.; investigation, M.H., U.R. and B.V.; resources, M.H. and B.V.; data curation, M.H.; writing—original draft preparation, M.H.; writing—review and editing, M.H., U.R. and B.V.; visualization, M.H., U.R. and B.V.; supervision, U.R. and B.V.; project administration, B.V.; funding acquisition, M.H. and B.V. All authors have read and agreed to the published version of the manuscript.
Funding
Previous work was funded by German Federal Ministry for Education and Research (BMBF) under the numbers 03FH029PX4 and 13FH029PX4. The recipient of the funding was htw saar (University of Applied Sciences, Saarbrücken, Germany), with which Fraunhofer IZFP regularly cooperates in research. Some of the materials used within this study (machine-made samples and some data sets) and some know-how originate from the previous research activities. Fraunhofer IZFP did not receive any external funding for the research.
Acknowledgments
The authors would like to thank all colleagues who supported the work with their expertise, in the field of data acquisition using various methods, in data evaluation and interpretation or by administrative and technical services. Special thanks go to Kelsey Newcomb for language revision of the publication.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Hertlin, I. Akustische Resonanzanalyse; Informationsschriften zur Zerstörungsfreien Prüfung–ZfP kompakt und Verständlich–Band 5; Castell-Verlag: Wuppertal, Germany, 2003. [Google Scholar]
- Richtlinie US 6. Akustische Resonanzverfahren zur Zerstörungsfreien Prüfung–Prinzip, Vorgehensweise, Merkmale, Validierung; Deutsche Gesellschaft für Zerstörungsfreie Prüfung e.V.: Berlin, Germany, 2009. [Google Scholar]
- Schwarz, J.J.; Rhodes, G.W. Resonance Inspection for Quality Control. In Review of Progress in Quantitative Nondestructive Evaluation; Thompson, D.O., Chimenti, D.E., Eds.; Plenum Press: New York, NY, USA, 1996; Volume 15, pp. 2265–2271. [Google Scholar] [CrossRef][Green Version]
- Stultz, G.; Bono, R.W.; Schiefer, M.I. Fundamentals of resonant acoustic method NDT. Adv. Powder Metall. Part. Mater. 2005, 3, 11. [Google Scholar]
- Coffey, E. Acoustic Resonance Testing. In Proceedings of the 2012 Future of Instrumentation International Workshop (FIIW), Gatlinburg, TN, USA, 8–9 October 2012. [Google Scholar] [CrossRef]
- ASTM E2001-18. Standard Guide for Resonant Ultrasound Spectroscopy for Defect Detection in Both Metallic and Non-metallic Parts; ASTM International: West Conshohocken, PA, USA, 2018. [Google Scholar] [CrossRef]
- ASTM E2534-15. Standard Practice for Process Compensated Resonance Testing Via Swept Sine Input for Metallic and Non-Metallic Parts; ASTM International: West Conshohocken, PA, USA, 2015. [Google Scholar] [CrossRef]
- Sankaran, V.H. Low cost inline NDT system for internal defect detection in automotive components using Acoustic Resonance Testing. In Proceedings of the National Seminar & Exhibition on Non Destructive Evaluation, NDE, Chennai, India, 8–11 December 2011; pp. 237–239. [Google Scholar]
- Sankaran, V.H. Acoustic Resonance Testing Using Transform Decomposition and Support Vector Machines for efficient and accurate Detection of Defects in Forged Components. In Proceedings of the 18th World Conference on Nondestructive Testing (WCNDT), Durban, South Africa, 16–20 April 2012. [Google Scholar]
- Joshi, A.K.; Patre, B.M. Sorting of Portable Small Metallic Components using Machine Learning. Int. J. Appl. Eng. Res. 2018, 13, 16282–16287. [Google Scholar]
- Eren, E.; Kurama, S.; Stultz, G.; Sorensen, S. Resonant Inspection of Ceramic Tiles. Key Eng. Mater. 2013, 544, 450–454. [Google Scholar] [CrossRef]
- Pribe, J.D.; West, B.M.; Gegel, M.L.; Hartwig, T.; Lunn, T.; Brown, B.; Bristow, D.A.; Landers, R.G.; Kinzel, E.C. Modal Response as a Validation Technique for Metal Parts Fabricated with Selective Laser Melting. In Proceedings of the 27th Annual International Solid Freeform Fabrication Symposium–An Additive Manufacturing Conference, Austin, TX, USA, 7–9 August 2016; pp. 151–174. [Google Scholar]
- Biswas, S.; Monroe, C. Identifying Cast Iron Microstructure Variation Using Acoustic Resonance Techniques. Int. J. Met. 2019, 13, 26–46. [Google Scholar] [CrossRef]
- Dannemann, M.; Kostka, P.; Kolbe, F.; Modler, N. Akustisch basiertes Diagnosesystem zur Beurteilung des Bauteilzustandes. In Proceedings of the 2016 DAGA Conference (DAGA 2016–42. Jahrestagung für Akustik), Aachen, Germany, 14–17 March 2016; pp. 806–808. [Google Scholar]
- Geweth, C.A.; Khosroshahi, S.F.; Sepahvand, K.; Kerkeling, C.; Marburg, S. Fehlererkennung mittels Eigenfrequenzanalyse bei mehrschichtigen Faserverbundwerkstoffen. In Proceedings of the 2016 DAGA Conference (DAGA 2016–42. Jahrestagung für Akustik), Aachen, Germany, 14–17 March 2016; pp. 1066–1067. [Google Scholar]
- Ibrahim, Y.; Li, Z.; Davies, C.M.; Maharaj, C.; Dear, J.P.; Hooper, P.A. Acoustic resonance testing of additive manufactured lattice structures. Addit. Manuf. 2018, 24, 566–576. [Google Scholar] [CrossRef]
- Kraljevski, I.; Duckhorn, F.; Ju, Y.C.; Tschoepe, C.; Wolff, M. Acoustic Resonance Testing of Glass IV Bottles. In Proceedings of the IFIP International Conference on Artificial Intelligence Applications and Innovations, Neos Marmaras, Greece, 5–7 June 2020; pp. 195–206. [Google Scholar] [CrossRef]
- Zhang, W.; Lv, Z.; Xiong, S. Nondestructive quality evaluation of agro-products using acoustic vibration methods—A review. Crit. Rev. Food Sci. Nutr. 2018, 58, 2386–2397. [Google Scholar] [CrossRef]
- Migliori, A.; Sarrao, J.L. Resonant Ultrasound Spectroscopy–Applications to Physics, Materials Measurements, and Nondestructive Evaluation; Wiley: New York, NY, USA, 1997. [Google Scholar]
- Lai, C.; Sun, X.; Dasch, C.; Harmon, G.; Jones, M. Quantify Resonance Inspection With Finite Element-Based Modal Analyses. J. Vib. Acoust. 2011, 133, 031004. [Google Scholar] [CrossRef]
- Hertlin, I. Acoustic Resonance Analysis Using FEM and Laser Scanning For Defect Characterization in In-Process NDT. In Proceedings of the 9th European Conference on Non-destructive Testing (ECNDT), Berlin, Germany, 25–29 September 2006. [Google Scholar]
- Schmidt, L.; Steinbuch, R. Improved Interpretation of the Acoustic Response Spectrum to Identify Types of Component Deviations. Res. Nondestruct. Eval. 2002, 14, 95–110. [Google Scholar] [CrossRef]
- Rabe, U.; Geng, K.; Goebel, M.; Balijepalli, R.; Walte, F.; Valeske, B. Schwingungen von Stäben als Modell für die Klangprüfung. In Proceedings of the 2014 DGZfP Conference (DGZfP-Jahrestagung 2010), Erfurt, Germany, 10–12 May 2010. [Google Scholar]
- Gudmundson, P. Eigenfrequency changes of structures due to cracks, notches or other geometrical changes. J. Mech. Phys. Solids 1982, 30, 339–353. [Google Scholar] [CrossRef]
- Kisa, M.; Brandon, J. The effects of closure of cracks on the dynamics of a cracked cantilever beam. J. Sound Vib. 2000, 238, 1–18. [Google Scholar] [CrossRef]
- Zhang, K.; Yan, X. Multi-cracks identification method for cantilever beam structure with variable cross-sections based on measured natural frequency changes. J. Sound Vib. 2017, 387, 53–65. [Google Scholar] [CrossRef]
- Sockel, H.G.; Hermann, W. Torsional and Flexural Vibrations of Rods. In Handbook of Elastic Properties of Solids, Liquids, and Gases–Volume 1: Dynamic Methods for Measuring the Elastic Properties of Solids; Levy, M., Bass, H.E., Stern, R.R., Eds.; Academic Press: London, UK, 2001; pp. 315–336. [Google Scholar]
- Plesek, J.; Kolman, R.; Landa, M. Using finite element method for the determination of elastic moduli by resonant ultrasound spectroscopy. J. Acoust. Soc. Am. 2004, 116, 282–287. [Google Scholar] [CrossRef]
- Steinbuch, R. Scatter or Defect? Some Remarks on the Interpretation of Acoustic Spectral Shift. Res. Nondestruct. Eval. 2005, 15, 173–189. [Google Scholar] [CrossRef]
- Lai, C.; Xu, W.; Sun, X. Development of an Inverse Algorithm for Resonance Inspection. J. Vib. Acoust. 2012, 134, 051017. [Google Scholar] [CrossRef]
- Lai, C.; Sun, X. Predicting flaw-induced resonance spectrum shift with theoretical perturbation analysis. J. Sound Vib. 2013, 332, 5953–5964. [Google Scholar] [CrossRef]
- Xu, W.; Lai, C.; Sun, X. Identify structural flaw location and type with an inverse algorithm of resonance inspection. J. Vib. Control. 2015, 21, 2685–2696. [Google Scholar] [CrossRef]
- DIN ISO 2768-1:1991-06. Allgemeintoleranzen; Toleranzen für Längen- und Winkelmaße Ohne Einzelne Toleranzeintragung; Beuth Verlag GmbH: Berlin, Germany, 1991. [Google Scholar] [CrossRef]
- Heinrich, M. Abschätzung der Ist-Abmessungen eines Körpers anhand seiner zerstörungsfrei bestimmten Eigenfrequenzen mit multipler Regressionsanalyse zur Qualitätssicherung in einer Serienfertigung. Bachelor Thesis, ASW Berufsakademie Saarland e.V., Neunkirchen (Saar), Germany, 2013. Available online: http://publica.fraunhofer.de/documents/N-356528.html (accessed on 3 August 2020).
- Heinrich, M.; Rabe, U.; Grabowski, B.; Valeske, B. Methodische Entwicklung der akustischen Resonanzanalyse zur zerstörungsfreien Erkennung von ur- oder umgeformten Serienteilen mit unzulässigen Geometrieabweichungen–simulationsbasierte Modellüberlegungen. In Proceedings of the 2015 DACH Conference (DACH-Jahrestagung 2015), Salzburg, Austria, 11–13 May 2015. [Google Scholar]











© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).