A Personalised Emotion-Based Model for Relaxation in Virtual Reality




Abstract
1. Introduction
2. Related Work
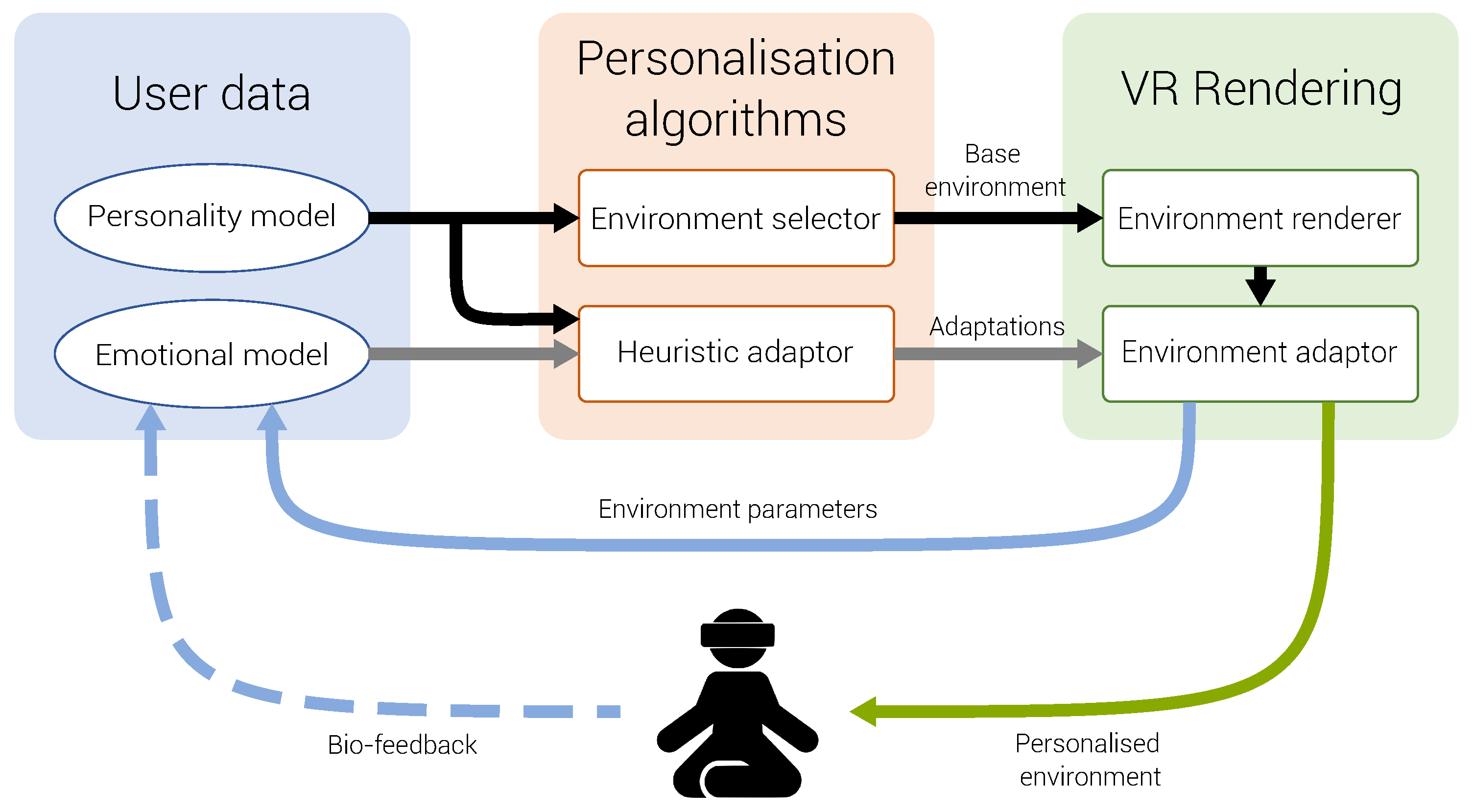
3. Methodology
3.1. Personality Model
3.2. Emotional Model
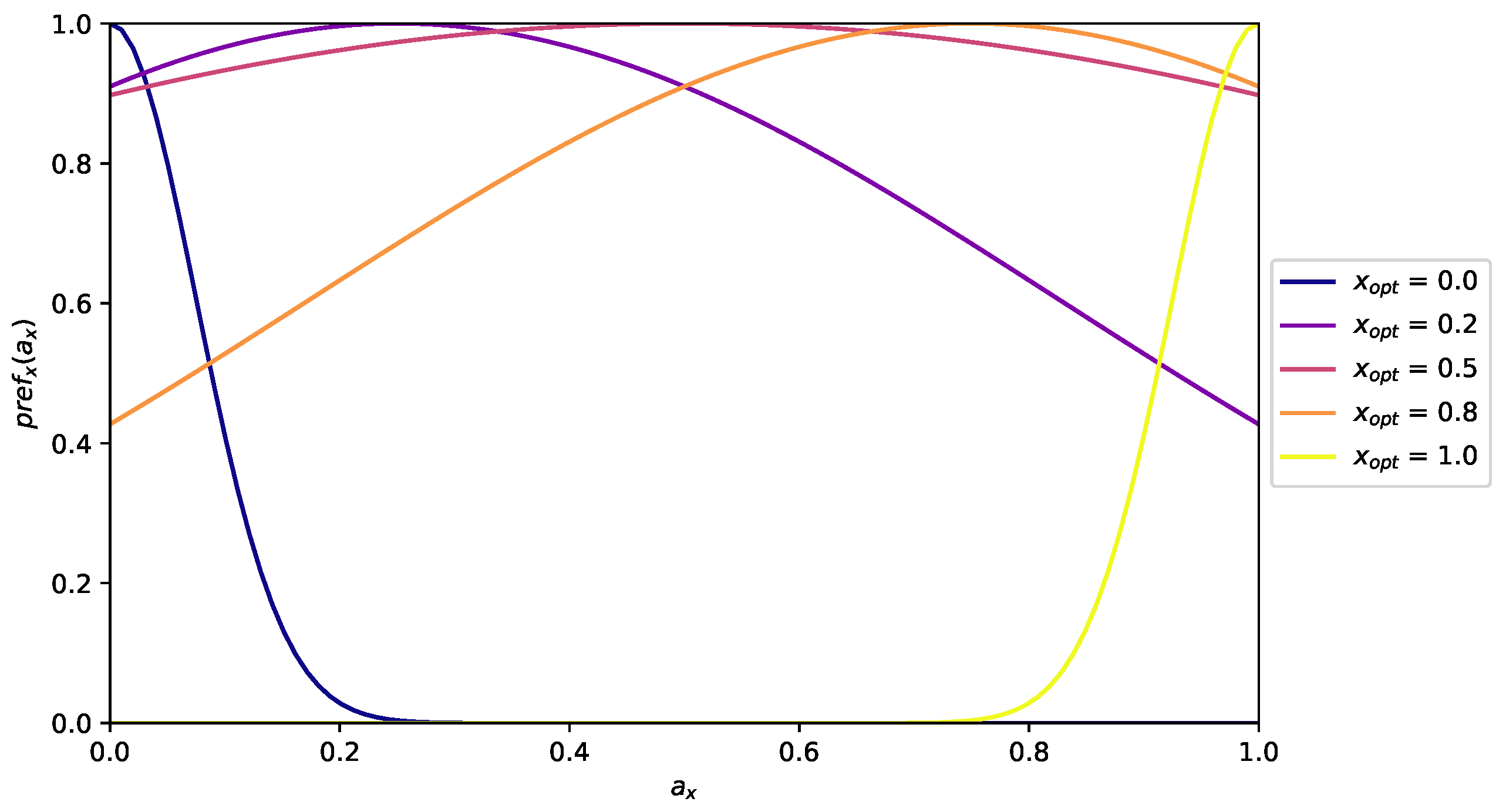
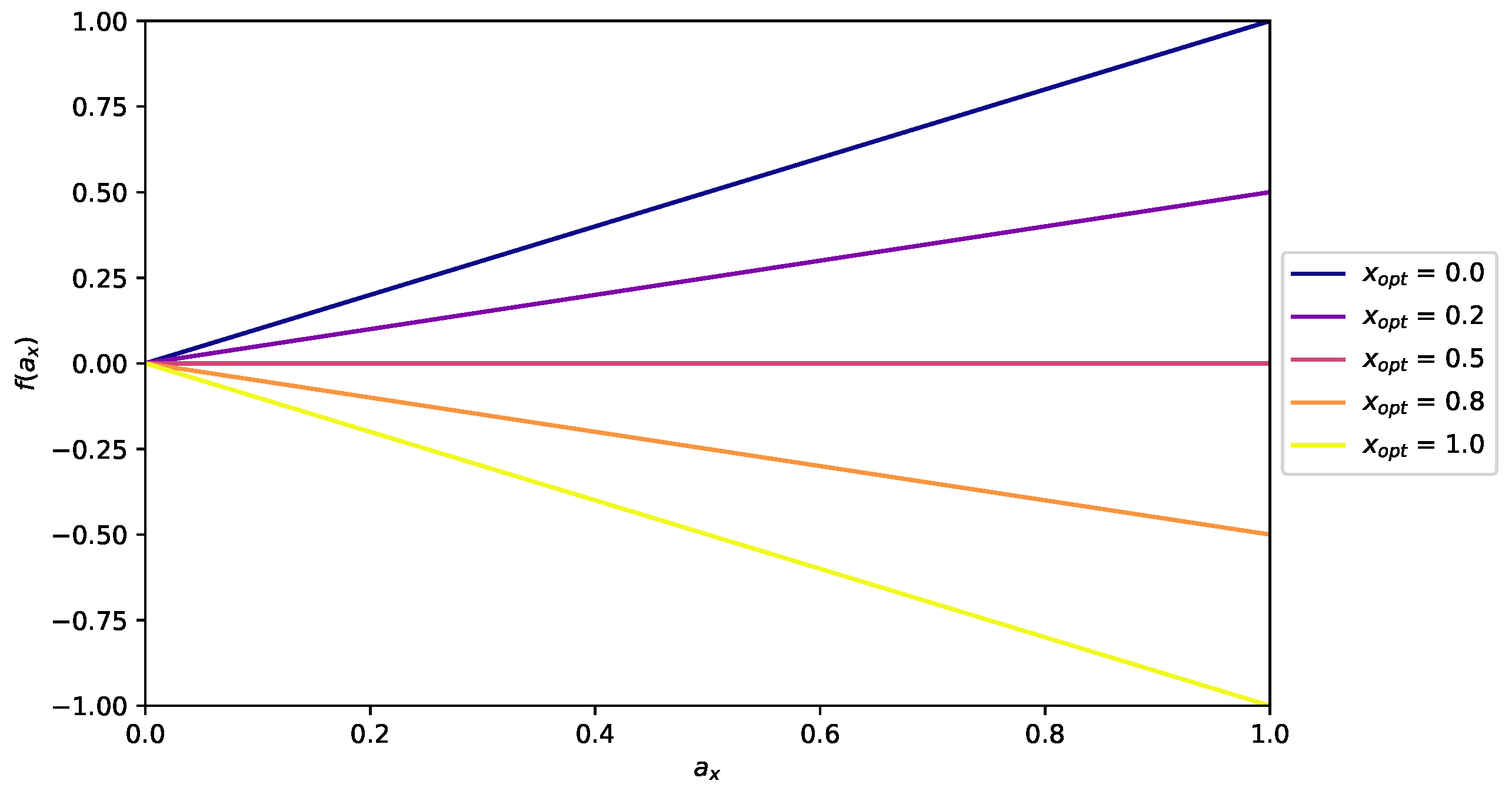
3.3. Heuristic Adaptor
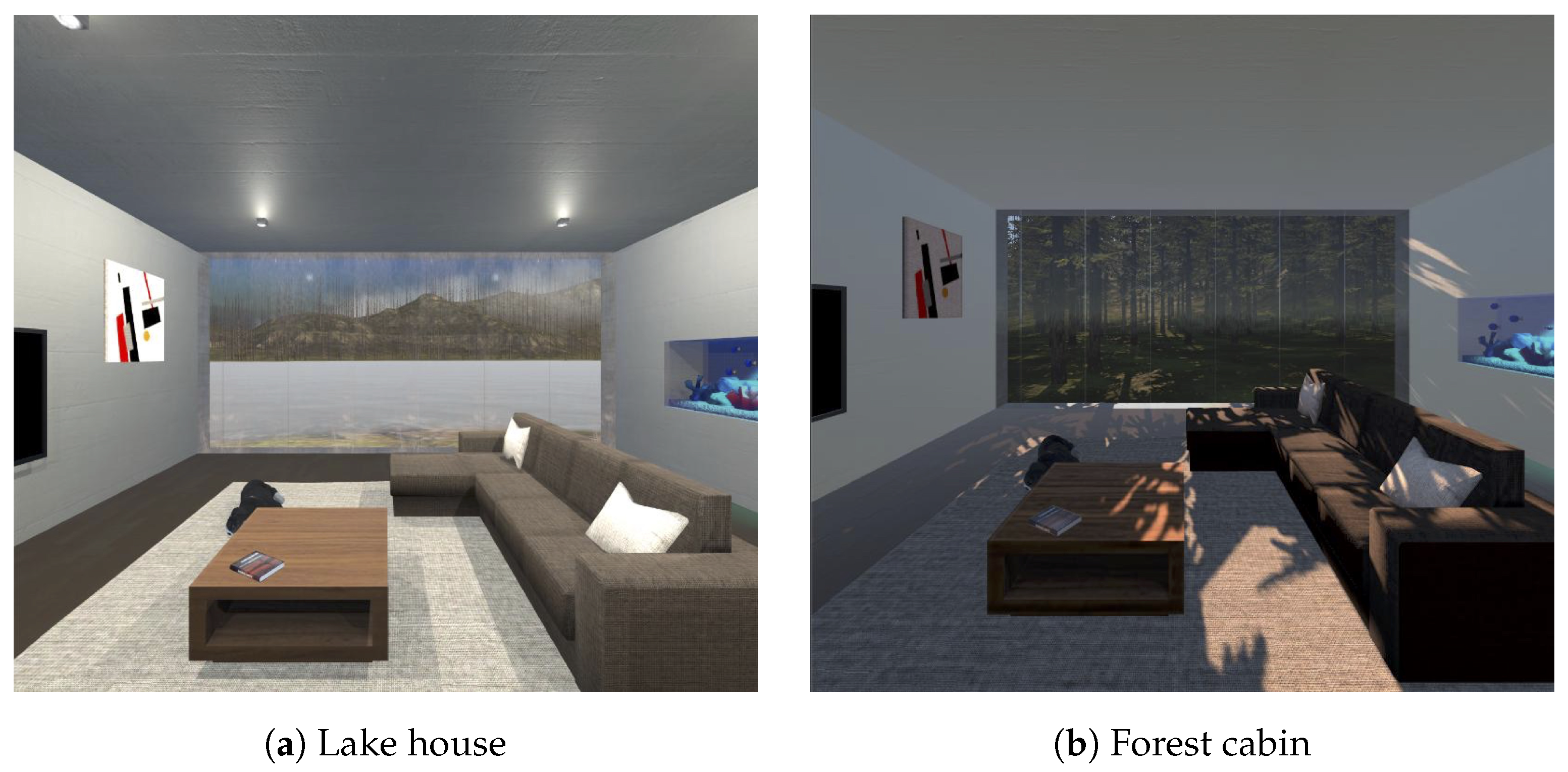
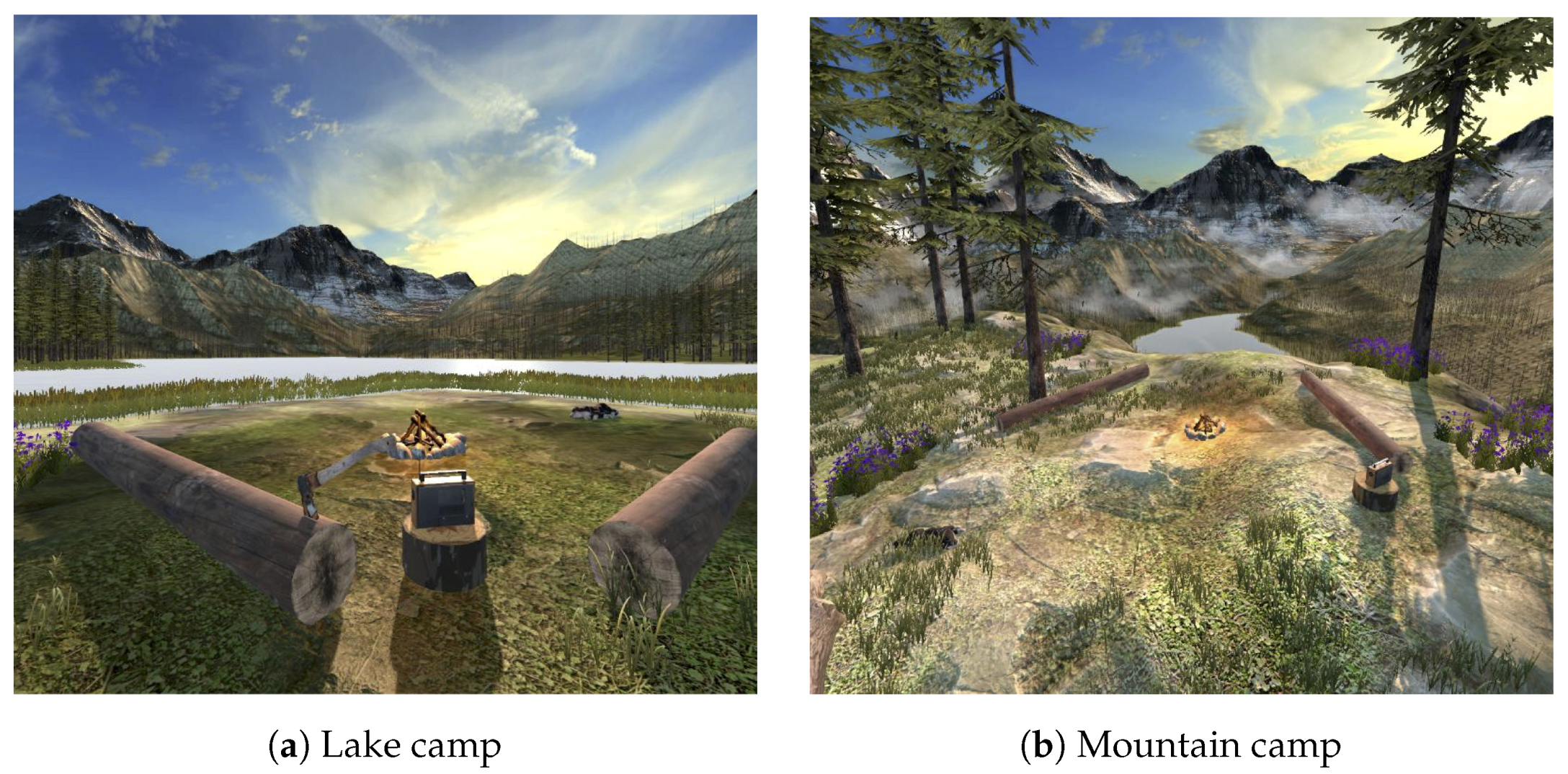
4. Use Case Implementation
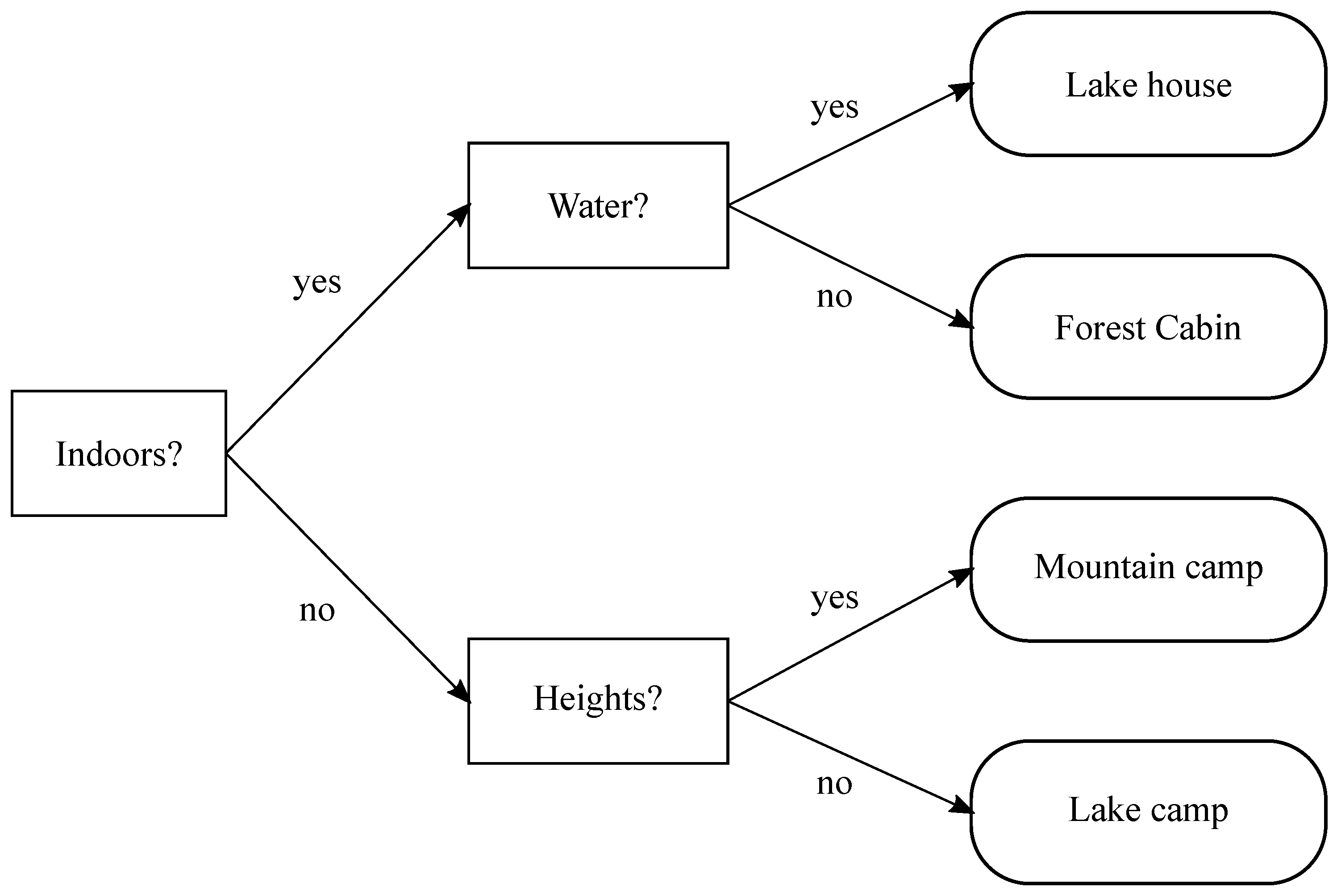
4.1. Personalisation Model and Environment Selector
4.2. Emotional Model
- dog
- fire
- natural lighting
- artificial lighting
- controlled breathing on
- controlled breathing off
- music
- light colour
5. Experimental Evaluation
5.1. Simulating Users
5.2. Results
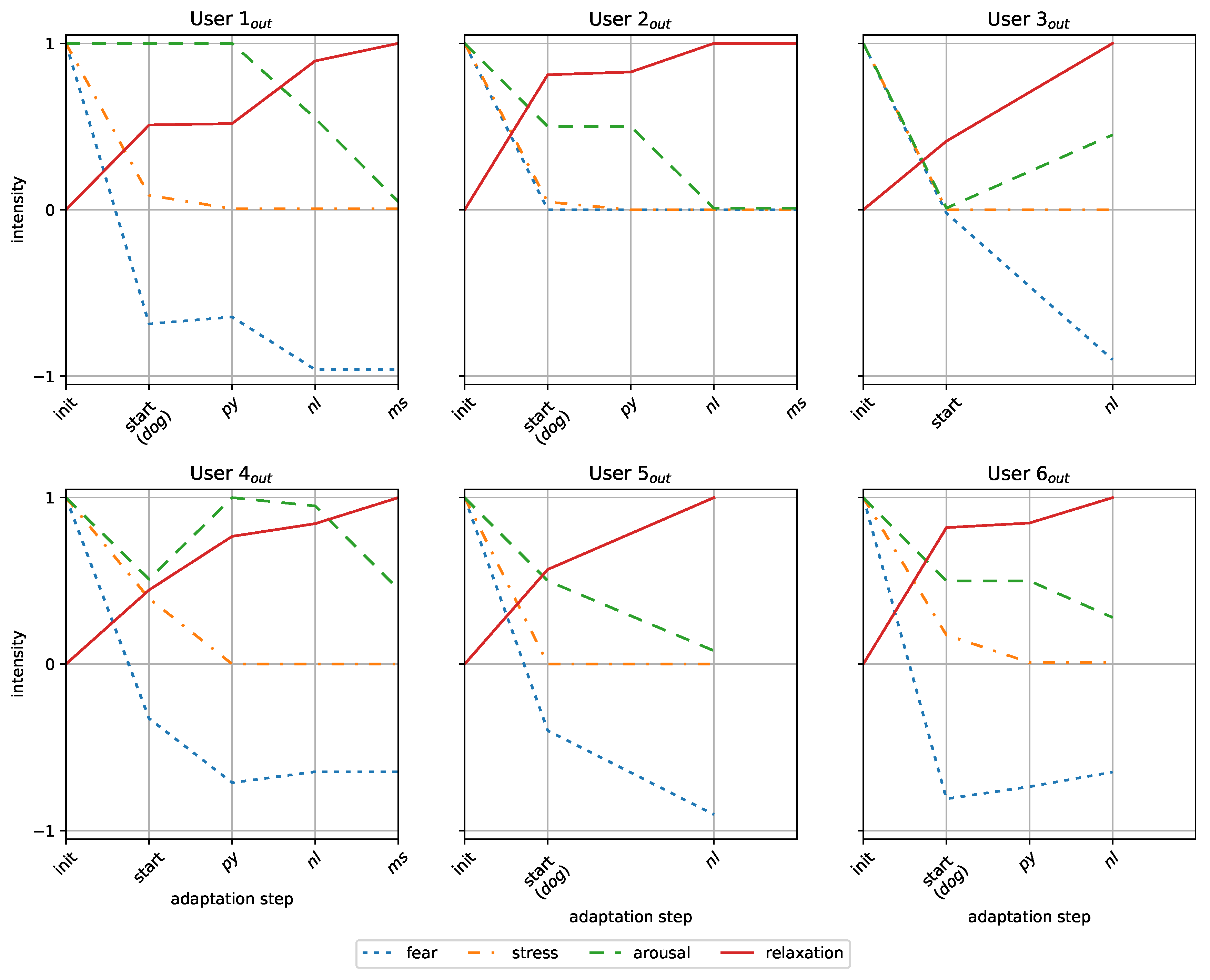
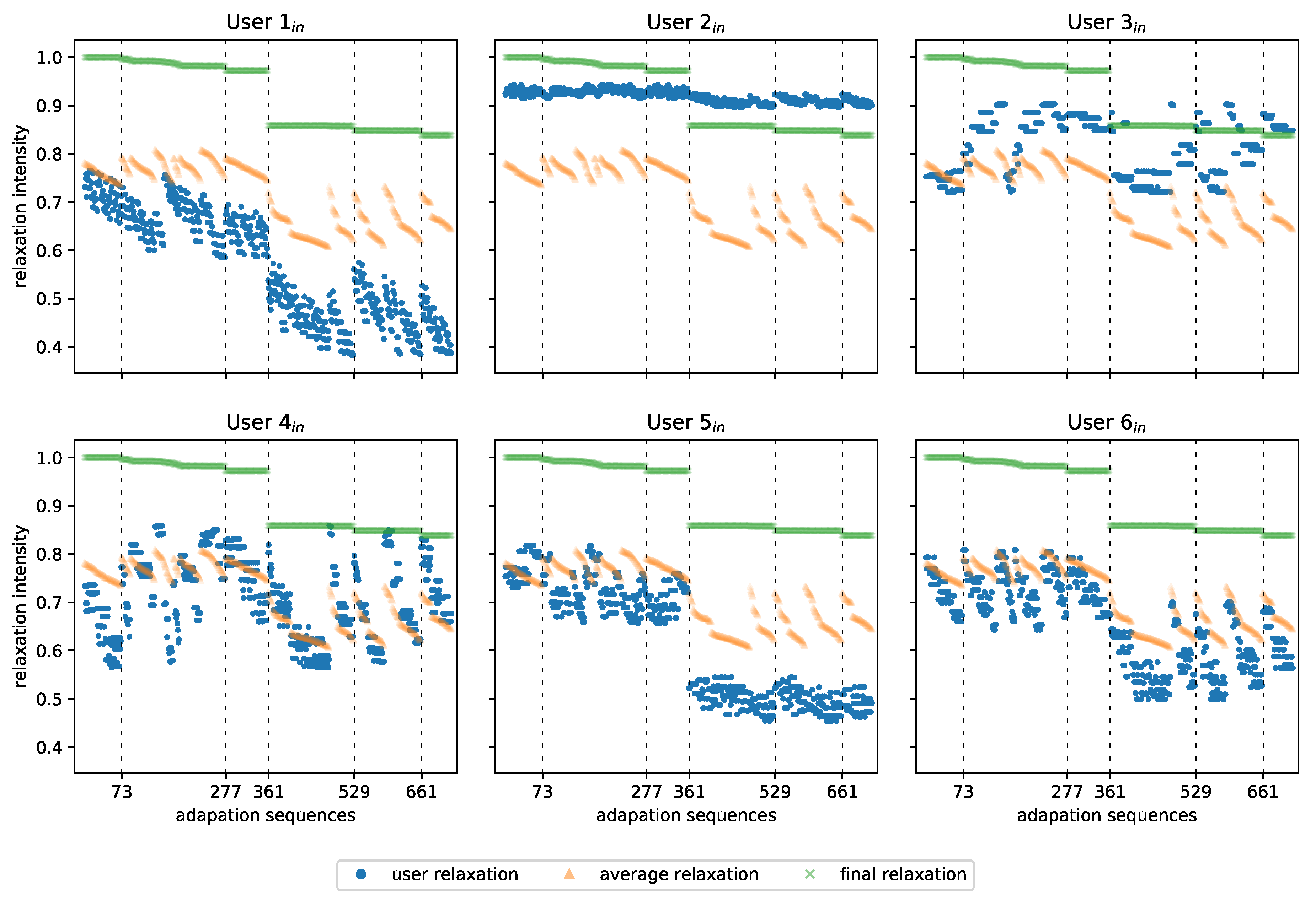
5.2.1. Performance Analysis
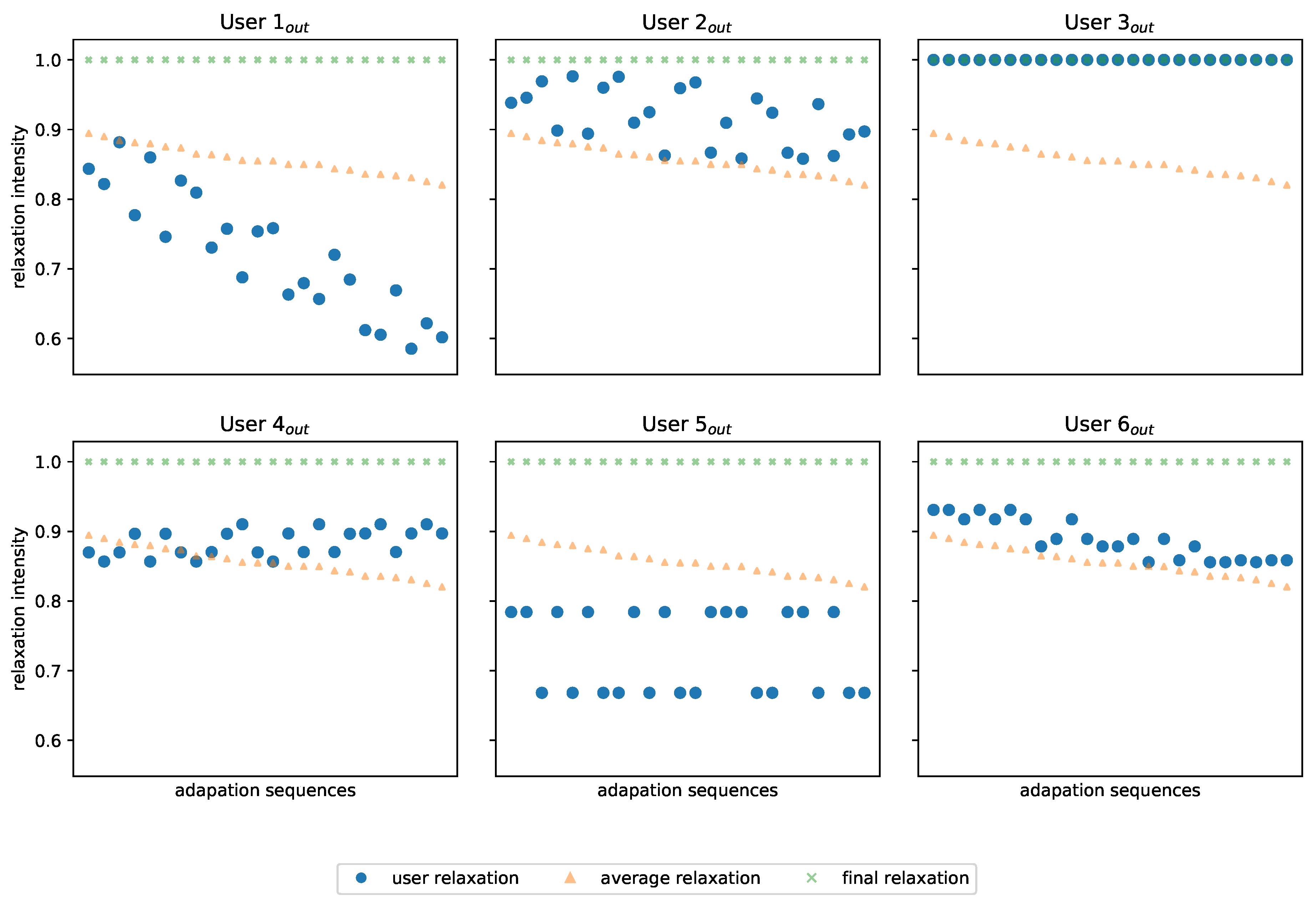
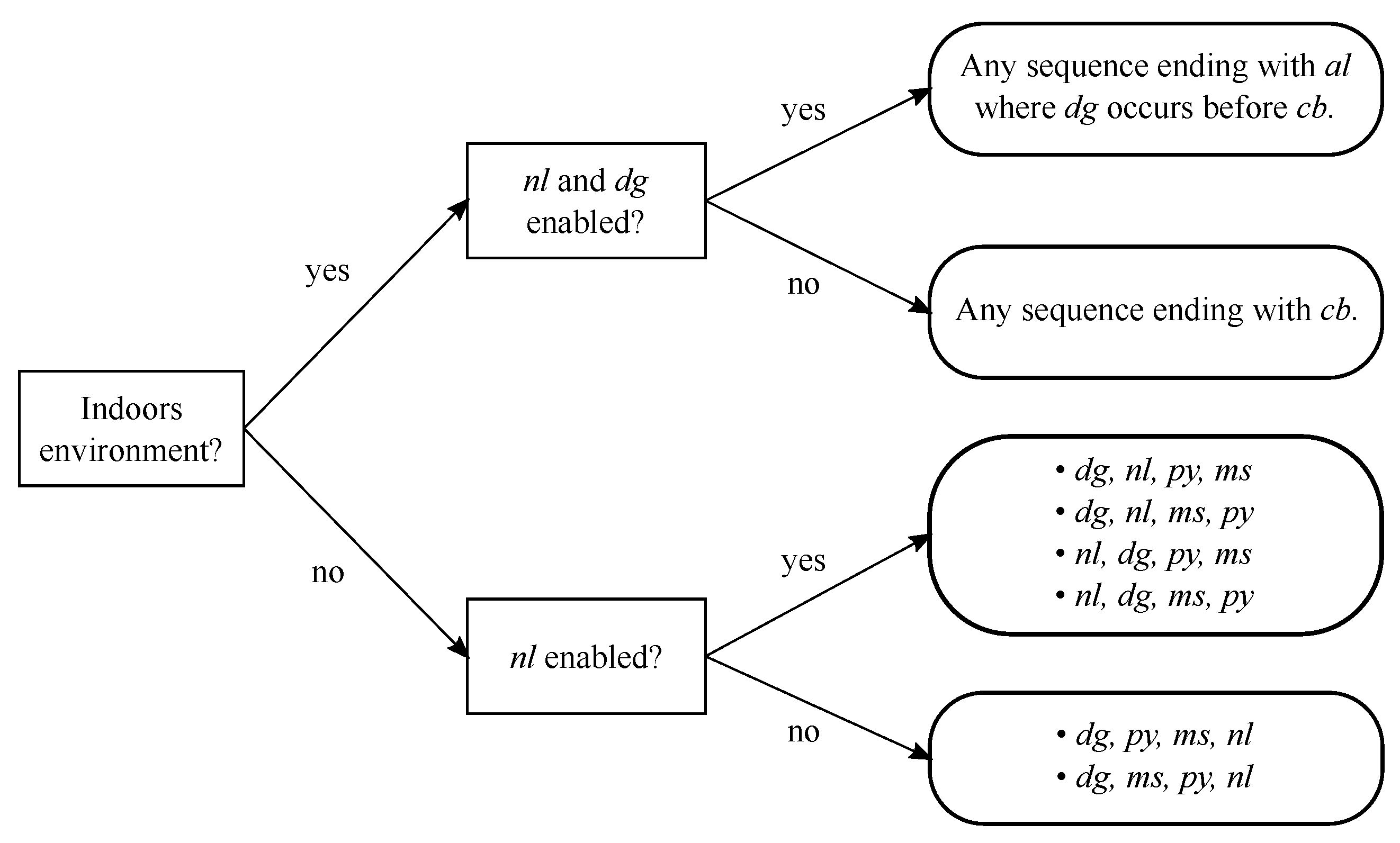
5.2.2. Adaptation Order
5.3. Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CNN | Convolutional Neural Network. |
| HMD | Head Mounted Display. |
| ICU | Intensive Care Unit. |
| MILP | Mixed Integer Linear Programming. |
| MINLP | Mixed Integer Non-Linear Programming. |
| SVM | Support Vector Machine. |
| VE | Virtual Environment. |
| VR | Virtual Reality. |
| WHO | World Health Organisation. |
References
- Varvogli, L.; Darviri, C. Stress Management Techniques: Evidence-based procedures that reduce stress and promote health. Health Sci. J. 2011, 5, 74–89. [Google Scholar]
- Bell, A.S.; Rajendran, D.; Theiler, S. Job stress, wellbeing, work-life balance and work-life conflict among Australian academics. E J. Appl. Psychol. 2012, 8, 25–37. [Google Scholar] [CrossRef]
- Skakon, J.; Nielsen, K.; Borg, V.; Guzman, J. Are leaders’ well-being, behaviours and style associated with the affective well-being of their employees? A systematic review of three decades of research. Work Stress 2010, 24, 107–139. [Google Scholar] [CrossRef]
- Kinman, G.; Wray, S. Taking Its Toll: Rising Stress Levels in Further Education UCU Stress Survey 2014; University and College Union: London, UK, 2015. [Google Scholar] [CrossRef]
- Carder, M.; Turner, S.; McNamee, R.; Agius, R. Work-related mental ill-health and ’stress’ in the UK (2002–2005). Occup. Med. 2009, 59, 539–544. [Google Scholar] [CrossRef][Green Version]
- Hanser, S.B. Music Therapy and Stress Reduction Research. J. Music Ther. 1985, 22, 193–206. [Google Scholar] [CrossRef]
- Steptoe, A.; Kivimäki, M. Stress and cardiovascular disease. Nat. Rev. Cardiol. 2012, 9, 360–370. [Google Scholar] [CrossRef]
- Schure, M.B.; Christopher, J.; Christopher, S. Mind-Body Medicine and the Art of Self-Care: Teaching Mindfulness to Counseling Students Through Yoga, Meditation, and Qigong. J. Couns. Dev. 2008, 86, 47–56. [Google Scholar] [CrossRef]
- Trappey, A.; Trappey, C.V.; Chang, C.M.; Kuo, R.R.; Lin, A.P.; Nieh, C. Virtual Reality Exposure Therapy for Driving Phobia Disorder: System Design and Development. Appl. Sci. 2020, 10, 4860. [Google Scholar] [CrossRef]
- Pizzoli, S.F.M.; Mazzocco, K.; Triberti, S.; Monzani, D.; Alcañiz Raya, M.L.; Pravettoni, G. User-Centered Virtual Reality for Promoting Relaxation: An Innovative Approach. Front. Psychol. 2019, 10, 479. [Google Scholar] [CrossRef]
- Gutiérrez, A.; Sepúlveda-Muñoz, D.; Gil-Agudo, A.; de los Reyes Guzmán, A. Serious Game Platform with Haptic Feedback and EMG Monitoring for Upper Limb Rehabilitation and Smoothness Quantification on Spinal Cord Injury Patients. Appl. Sci. 2020, 10, 963. [Google Scholar] [CrossRef]
- Lee, L.N.; Kim, M.J.; Hwang, W.J. Potential of Augmented Reality and Virtual Reality Technologies to Promote Wellbeing in Older Adults. Appl. Sci. 2019, 9, 3556. [Google Scholar] [CrossRef]
- Valmaggia, L.R.; Latif, L.; Kempton, M.J.; Rus-Calafell, M. Virtual reality in the psychological treatment for mental health problems: An systematic review of recent evidence. Psychiatry Res. 2016, 236, 189–195. [Google Scholar] [CrossRef]
- Emmelkamp, P.M.G. Effectiveness of cybertherapy in mental health: A critical appraisal. Stud. Health Technol. Inform. 2011, 167, 3–8. [Google Scholar]
- Meyerbröker, K.; Emmelkamp, P.M. Virtual reality exposure therapy in anxiety disorders: A systematic review of process-and-outcome studies. Depress. Anxiety 2010, 27, 933–944. [Google Scholar] [CrossRef]
- Sekhavat, Y.A.; Nomani, P. A Comparison of Active and Passive Virtual Reality Exposure Scenarios to Elicit Social Anxiety. Int. J. Serious Games 2017, 4, 3–15. [Google Scholar] [CrossRef]
- Powers, M.B.; Emmelkamp, P.M. Virtual reality exposure therapy for anxiety disorders: A meta-analysis. J. Anxiety Disord. 2008, 22, 561–569. [Google Scholar] [CrossRef]
- Opriş, D.; Pintea, S.; García-Palacios, A.; Botella, C.; Szamosközi, Ş.; David, D. Virtual reality exposure therapy in anxiety disorders: A quantitative meta-analysis: Virtual Reality Exposure Therapy. Depress. Anxiety 2012, 29, 85–93. [Google Scholar] [CrossRef]
- Shah, L.B.I.; Torres, S.; Kannusamy, P.; Chng, C.M.L.; He, H.G.; Klainin-Yobas, P. Efficacy of the Virtual Reality-Based Stress Management Program on Stress-Related Variables in People With Mood Disorders: The Feasibility Study. Arch. Psychiatr. Nurs. 2015, 29, 6–13. [Google Scholar] [CrossRef]
- Soyka, F.; Leyrer, M.; Smallwood, J.; Ferguson, C.; Riecke, B.E.; Mohler, B.J. Enhancing stress management techniques using virtual reality. In Proceedings of the ACM Symposium on Applied Perception— SAP ’16, Anaheim, CA, USA, 22–23 July 2016; pp. 85–88. [Google Scholar] [CrossRef]
- Gerber, S.M.; Jeitziner, M.M.; Wyss, P.; Chesham, A.; Urwyler, P.; Müri, R.M.; Jakob, S.M.; Nef, T. Visuo-acoustic stimulation that helps you to relax: A virtual reality setup for patients in the intensive care unit. Sci. Rep. 2017, 7, 1–10. [Google Scholar] [CrossRef]
- Anderson, A.P.; Mayer, M.D.; Fellows, A.M.; Cowan, D.R.; Hegel, M.T.; Buckey, J.C. Relaxation with Immersive Natural Scenes Presented Using Virtual Reality. Aerosp. Med. Hum. Perform. 2017, 88, 520–526. [Google Scholar] [CrossRef]
- Hyland, M.E.; Halpin, D.M.; Blake, S.; Seamark, C.; Pinnuck, M.; Ward, D.; Whalley, B.; Greaves, C.J.; Hawkins, A.L.; Seamark, D. Preference for different relaxation techniques by COPD patients: Comparison between six techniques. Int. J. Chronic Obstr. Pulm. Dis. 2016, 11, 2315–2319. [Google Scholar] [CrossRef]
- Graffam, S.; Johnson, A. A comparison of two relaxation strategies for the relief of pain and its distress. J. Pain Symptom Manag. 1987, 2, 229–231. [Google Scholar] [CrossRef]
- Macnamara, C.L.; Cvejic, E.; Parker, G.B.; Lloyd, A.R.; Lee, G.; Beilharz, J.E.; Vollmer-Conna, U. Personalised relaxation practice to improve sleep and functioning in patients with chronic fatigue syndrome and depression: Study protocol for a randomised controlled trial. Trials 2018, 19, 371. [Google Scholar] [CrossRef]
- Maples-Keller, J.L.; Bunnell, B.E.; Kim, S.J.; Rothbaum, B.O. The Use of Virtual Reality Technology in the Treatment of Anxiety and Other Psychiatric Disorders. Harv. Rev. Psychiatry 2017, 25, 103–113. [Google Scholar] [CrossRef]
- Garcia-Ceja, E.; Riegler, M.; Nordgreen, T.; Jakobsen, P.; Oedegaard, K.J.; Tørresen, J. Mental health monitoring with multimodal sensing and machine learning: A survey. Pervasive Mob. Comput. 2018, 51, 1–26. [Google Scholar] [CrossRef]
- Egger, M.; Ley, M.; Hanke, S. Emotion Recognition from Physiological Signal Analysis: A Review. Electron. Notes Theor. Comput. Sci. 2019, 343, 35–55. [Google Scholar] [CrossRef]
- Healey, J.; Picard, R. Detecting Stress During Real-World Driving Tasks Using Physiological Sensors. IEEE Trans. Intell. Transp. Syst. 2005, 6, 156–166. [Google Scholar] [CrossRef]
- Miranda, D.; Calderón, M.; Favela, J. Anxiety detection using wearable monitoring. In Proceedings of the 5th Mexican Conference on Human-Computer Interaction—MexIHC ’14, Oaxaca, Mexico, 3–5 November 2014; pp. 34–41. [Google Scholar] [CrossRef]
- Lee, M.S.; Lee, Y.K.; Pae, D.S.; Lim, M.T.; Kim, D.W.; Kang, T.K. Fast Emotion Recognition Based on Single Pulse PPG Signal with Convolutional Neural Network. Appl. Sci. 2019, 9, 3355. [Google Scholar] [CrossRef]
- Domínguez-Jiménez, J.; Campo-Landines, K.; Martínez-Santos, J.; Delahoz, E.; Contreras-Ortiz, S. A machine learning model for emotion recognition from physiological signals. Biomed. Signal Process. Control 2020, 55, 101646. [Google Scholar] [CrossRef]
- Steimer, T. The biology of fear- and anxiety-related behaviors. Dialogues Clin. Neurosci. 2002, 4, 231–249. [Google Scholar]
- Sims, C.R. Rate–distortion theory and human perception. Cognition 2016, 152, 181–198. [Google Scholar] [CrossRef]
- Smolders, K.C.; de Kort, Y.A. Bright light and mental fatigue: Effects on alertness, vitality, performance and physiological arousal. J. Environ. Psychol. 2014, 39, 77–91. [Google Scholar] [CrossRef]
- Luenberger, D.G.; Ye, Y. Linear and Nonlinear Programming; International Series in Operations Research & Management Science; Springer International Publishing: Cham, Switzerland, 2016; Volume 228. [Google Scholar] [CrossRef]
- Manav, B. Color-emotion associations and color preferences: A case study for residences. Color Res. Appl. 2007, 32, 144–150. [Google Scholar] [CrossRef]
- Dana Lynn, C. Hearth and Campfire Influences on Arterial Blood Pressure: Defraying the Costs of the Social Brain through Fireside Relaxation. Evol. Psychol. 2014, 12, 147470491401200. [Google Scholar] [CrossRef]
- Friedmann, E.; Son, H. The Human–Companion Animal Bond: How Humans Benefit. Vet. Clin. N. Am. Small Anim. Pract. 2009, 39, 293–326. [Google Scholar] [CrossRef]
- Suied, C.; Drettakis, G.; Warusfel, O.; Viaud-Delmon, I. Auditory-Visual Virtual Reality as a Diagnostic and Therapeutic Tool for Cynophobia. Cyberpsychol. Behav. Soc. Netw. 2013, 16, 145–152. [Google Scholar] [CrossRef]
- Paulus, E.; Yusuf, F.; Suryani, M.; Suryana, I. Development and Evaluation on Night Forest Virtual Reality as Innovative Nyctophobia Treatment. J. Phys. Conf. Ser. 2019, 1235, 012003. [Google Scholar] [CrossRef]
- Heyse, J.; Jonge, T.D.; Torres Vega, M.; Backere, F.D.; De Turck, F. A personalized Virtual Reality Experience for Relaxation Therapy. In Proceedings of the 2019 Eleventh International Conference on Quality of Multimedia Experience (QoMEX), Berlin, Germany, 5–7 June 2019; pp. 1–3. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Full Name | Notation | Indoor | Outdoor | Description |
|---|---|---|---|---|
| Artificial light | x | Artificial light coming from light bulbs in the ceiling of the room. | ||
| Natural light | x | x | Natural light coming from the sun and moon. | |
| Light colour | x | The colour of the artificial light. The available colors are white and blue and any mixture of these two. | ||
| Fire | x | A simulation of a campfire. This also generates some artificial light. | ||
| Dog | x | x | A dog playing around. The dog can be either playing around further away or be near the user. | |
| Music | x | x | Some relaxation music or sounds are playing in the background. These are birds sounds for the indoor environments and soothing music for the indoor environments. | |
| Controlled breathing | x | An visual aid for a controlled breathing exercise is shown. |
| No. | Question | Possible Answers |
|---|---|---|
| 1 | Would you prefer an indoor or outdoor environment to relax? | [indoor, outdoor] |
| 2 | Could the presence of water help you to relax? | [yes, no] |
| 3 | Are you afraid of heights? | [yes, no] |
| 4 | What is you favourite season? | [summer, winter] |
| 5 | How does having a calm campfire nearby make you feel? | {relaxed, anxious} |
| 6 | How do you feel when a dog is in your presence? | {relaxed, anxious} |
| 7 | How does darkness make you feel? | {relaxed, anxious} |
| 8 | How do you find classical relaxation music? | {very relaxing, not relaxing at all} |
| 9 | Blue light gives you a relaxed feeling, do you agree? | {agree, disagree} |
| 10 | How afraid do you feel right now? | {not at all, very much} |
| 11 | How stressed do you feel right now? | {not at all, very much} |
| 12 | How aroused do you feel right now? | {not at all, very much} |
| Range | ||||||||
|---|---|---|---|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 1 | 1 | 0 | ||
| 1 | 0 | 0 | 0 | 1 | 1 | 0 | ||
| 0 | 0 | 0 | 0 | 0 | 1 | 0 | ||
| 1 | 1 | 0 | 0 | 0 | 0 | 0 | ||
| 1 | 1 | 0 | 0 | 0 | 0 | 0 | ||
| 0 | 0 | 0 | 1 | 0 | 1 | 0 | ||
| 0 | 0 | 1 | 0 | 0 | 0 | 1 |
| Id | Environment | Optimal Intensity | Description | |||||
|---|---|---|---|---|---|---|---|---|
| dg | py | nl | al | lc | ms | |||
| User | indoor | 0.9 | n/a | 0.9 | 0.9 | 0.9 | 0.9 | Dog lover; Afraid of darkness; Likes music and blue light. |
| User | outdoor | 0.9 | 0.9 | 0.9 | n/a | n/a | 0.9 | Dog lover; Afraid of darkness; Likes music and fire. |
| User | indoor | 0.5 | n/a | 0.5 | 0.5 | 0.5 | 0.5 | Neutral towards every adaptation. |
| User | outdoor | 0.5 | 0.5 | 0.5 | n/a | n/a | 0.5 | Neutral towards every adaptation. |
| User | indoor | 0.1 | n/a | 0.1 | 0.1 | 0.1 | 0.1 | Afraid of dogs; Loves darkness; Dislikes music and blue light. |
| User | outdoor | 0.1 | 0.1 | 0.1 | n/a | n/a | 0.1 | Afraid of dogs and fire; Loves darkness; Dislikes music. |
| User | indoor | 0.0 | n/a | 0.1 | 0.1 | 0.7 | 0.9 | Afraid of dogs; Loves darkness, music and blue light. |
| User | outdoor | 0.0 | 0.7 | 0.1 | n/a | n/a | 0.9 | Afraid of dogs; Loves darkness, music and fire. |
| User | indoor | 1.0 | n/a | 0.8 | 0.8 | 0.1 | 0.3 | Dog lover; Afraid of darkness; Dislikes music and blue light. |
| User | outdoor | 1.0 | 0 | 0.8 | n/a | n/a | 0.3 | Dog lover; Afraid of darkness and fire; Dislikes music. |
| User | indoor | 0.6 | n/a | 0.4 | 0.4 | 0.8 | 0.1 | Likes blue light; Dislikes music. |
| User | outdoor | 0.6 | 0.8 | 0.4 | n/a | n/a | 0.1 | Loves fire; Dislikes music. |
| No. | Sequence | Average Relaxation | Final Relaxation | |||
|---|---|---|---|---|---|---|
| 1 | dg | nl | ms | py | 0.894 | 1 |
| 2 | dg | nl | py | ms | 0.890 | 1 |
| 3 | nl | dg | ms | py | 0.884 | 1 |
| 4 | dg | ms | nl | py | 0.881 | 1 |
| 5 | nl | dg | py | ms | 0.880 | 1 |
| 6 | ms | dg | nl | py | 0.875 | 1 |
| 7 | nl | ms | dg | py | 0.874 | 1 |
| 8 | nl | py | dg | ms | 0.865 | 1 |
| 9 | dg | py | nl | ms | 0.864 | 1 |
| 10 | ms | nl | dg | py | 0.861 | 1 |
| 11 | dg | ms | py | nl | 0.856 | 1 |
| 12 | nl | ms | py | dg | 0.855 | 1 |
| 13 | nl | py | ms | dg | 0.855 | 1 |
| 14 | dg | py | ms | nl | 0.850 | 1 |
| 15 | py | dg | nl | ms | 0.850 | 1 |
| 16 | ms | dg | py | nl | 0.850 | 1 |
| 17 | py | nl | dg | ms | 0.844 | 1 |
| 18 | ms | nl | py | dg | 0.842 | 1 |
| 19 | py | dg | ms | nl | 0.836 | 1 |
| 20 | ms | py | dg | nl | 0.836 | 1 |
| 21 | py | nl | ms | dg | 0.834 | 1 |
| 22 | py | ms | dg | nl | 0.831 | 1 |
| 23 | ms | py | nl | dg | 0.825 | 1 |
| 24 | py | ms | nl | dg | 0.820 | 1 |
| No. | Sequence | Average Relaxation | Final Relaxation | |||||
|---|---|---|---|---|---|---|---|---|
| 1 | lc | dg | ms | cb | nl | al | 0.782 | 1.000 |
| … | ||||||||
| 72 | ms | nl | dg | cb | lc | al | 0.736 | 1.000 |
| 73 | lc | dg | ms | cb | al | nl | 0.793 | 0.996 |
| … | ||||||||
| 221 | dg | nl | al | cb | ms | lc | 0.759 | 0.982 |
| … | ||||||||
| 276 | ms | al | nl | dg | cb | lc | 0.751 | 0.982 |
| 277 | dg | al | lc | ms | cb | nl | 0.793 | 0.972 |
| … | ||||||||
| 360 | al | ms | nl | dg | cb | lc | 0.745 | 0.972 |
| 361 | lc | nl | ms | al | cb | dg | 0.719 | 0.858 |
| … | ||||||||
| 528 | cb | ms | al | nl | dg | lc | 0.622 | 0.858 |
| 529 | lc | nl | al | cb | dg | ms | 0.720 | 0.848 |
| … | ||||||||
| 660 | cb | al | ms | nl | dg | lc | 0.621 | 0.848 |
| 661 | al | lc | nl | ms | cb | dg | 0.719 | 0.838 |
| … | ||||||||
| 720 | al | cb | ms | nl | dg | lc | 0.644 | 0.838 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Heyse, J.; Torres Vega, M.; De Jonge, T.; De Backere, F.; De Turck, F. A Personalised Emotion-Based Model for Relaxation in Virtual Reality. Appl. Sci. 2020, 10, 6124. https://doi.org/10.3390/app10176124
Heyse J, Torres Vega M, De Jonge T, De Backere F, De Turck F. A Personalised Emotion-Based Model for Relaxation in Virtual Reality. Applied Sciences. 2020; 10(17):6124. https://doi.org/10.3390/app10176124
Chicago/Turabian StyleHeyse, Joris, Maria Torres Vega, Thomas De Jonge, Femke De Backere, and Filip De Turck. 2020. "A Personalised Emotion-Based Model for Relaxation in Virtual Reality" Applied Sciences 10, no. 17: 6124. https://doi.org/10.3390/app10176124
APA StyleHeyse, J., Torres Vega, M., De Jonge, T., De Backere, F., & De Turck, F. (2020). A Personalised Emotion-Based Model for Relaxation in Virtual Reality. Applied Sciences, 10(17), 6124. https://doi.org/10.3390/app10176124