Comparison of Disturbance Compensators for a Discrete-Time System with Parameter Uncertainty




{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- The stability of a DSMC system with parameter uncertainty is reevaluated analytically. Different from previous methods, parameter uncertainty is no longer regarded as part of the lumped disturbance but analyzed separately. The coupling relationship between parameter uncertainty and system state is considered.
- (2)
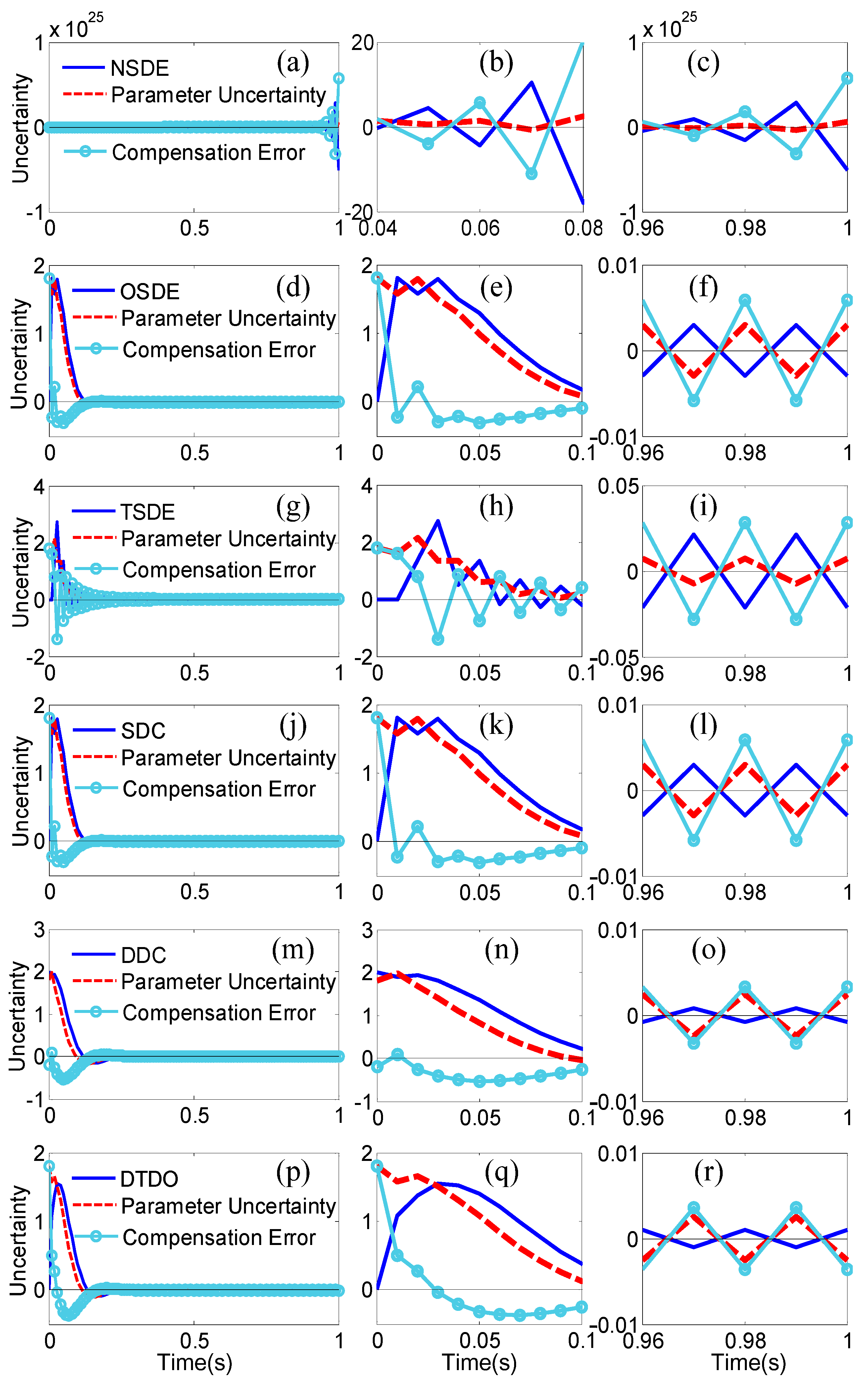
- The performance of six state-of-the-art disturbance compensators including NSDE, OSDE, TSDE, SDC, DDC, and DTDO for parameter uncertainty compensation is comprehensively studied. The theoretical bases of the compensators are presented and compared in detail.
2. Closed-Loop Stability Analysis
2.1. Traditional Stability Analysis
2.2. Stability Analysis Considering Parameter Uncertainty
3. Overview of Disturbance Compensators
3.1. N-Steps Delay Estimation
3.2. Sliding Mode ControlDisturbance Compensator
3.3. Decoupled Disturbance Compensator
3.4. Discrete-Time Disturbance Observer
4. Comparison and Results
4.1. Principles for Compensators’ Comparison
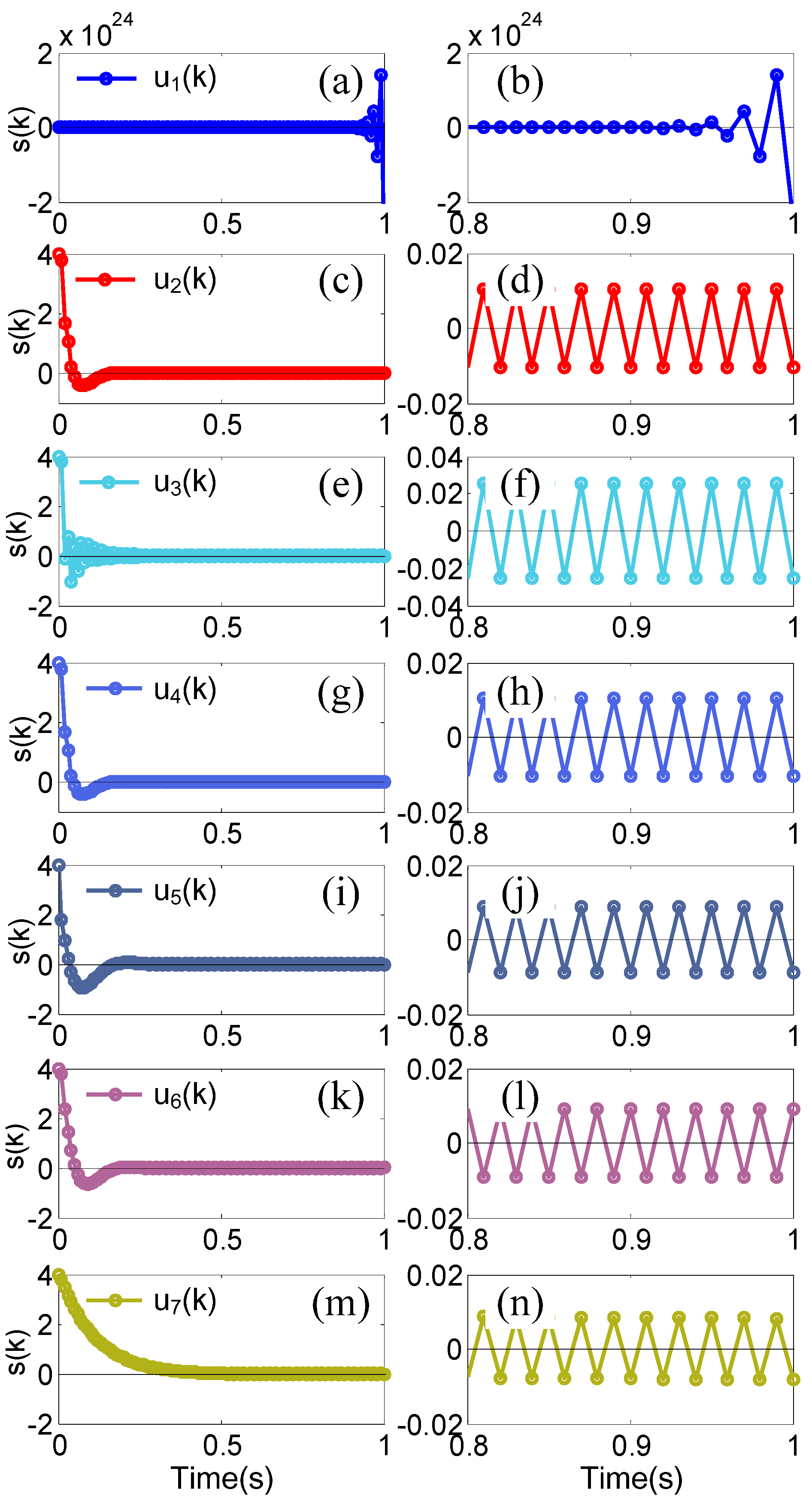
| DSMC 1 u1(k): | NSDE | ud1(k) | + | reaching law (16); |
| DSMC 2 u2(k): | OSDE | ud2(k) | + | reaching law (16); |
| DSMC 3 u3(k): | TSDE | ud3(k) | + | reaching law (16); |
| DSMC 4 u4(k): | SDC | ud4(k) | + | reaching law (16); |
| DSMC 5 u5(k): | DDC | ud5(k) | + | reaching law (16); |
| DSMC 6 u6(k): | DTDO | ud6(k) | + | reaching law (16); |
| DSMC 7 u7(k): | + | reaching law (16). | ||
4.2. Simulation Results and Comparison
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Symbols | Description |
| Φ, Γ | System matrix and vector. |
| ΔΦ | Parameter uncertainty. |
| k | k-th step in the discrete-time system. |
| d(k) | Disturbance. |
| x(k) | System state. |
| u(k) | Control input. |
| f(k) | Lumped disturbance. |
| z(k) | System state after transformation. |
| s(k) | Switching function. |
| C | Gain vector of switching function. |
| Difference operator. | |
| q, ξ, g | Control parameters. |
| λ | Eigenvalue. |
| Ωi, i = 1, 2, 3 | Upper bound. |
| Λ | Diagonal matrix. |
| ϑ(k) | Finite number function. |
References
- Lin, C.-H.; Hsiao, F.-Y. Proportional-integral sliding mode control with an application in the balance control of a two-wheel vehicle system. Appl. Sci. 2020, 10, 5087. [Google Scholar] [CrossRef]
- Ponce, P.; Rosales, J.A.; Molina, A.; Ponce, H.; MacCleery, B. Designing a robust controller using SMC and fuzzy artificial organic networks for brushed DC motors. Energies 2020, 13, 3091. [Google Scholar] [CrossRef]
- Lin, S.; Zhang, W.; Wang, H. Controller designed via an adaptive reaching law for DSMC systems. IEEE Trans. Circuits Syst. II Exp. Briefs 2020, 67, 330–334. [Google Scholar] [CrossRef]
- Goyal, J.; Kamal, S.; Patel, R.; Yu, X.; Mishra, J. Higher order sliding mode control based finite-time constrained stabilization. IEEE Trans. Circuits Syst. II Exp. Briefs 2020, 67, 295–299. [Google Scholar] [CrossRef]
- Yu, X.; Wang, B.; Li, X. Computer-controlled variable structure systems: The state-of-the-art. IEEE Trans. Ind. Inf. 2012, 8, 197–205. [Google Scholar] [CrossRef]
- Ma, H.; Li, Y. A novel dead zone reaching law of discrete-time sliding mode control with disturbance compensation. IEEE Trans. Ind. Electron. 2020, 67, 4815–4825. [Google Scholar] [CrossRef]
- Du, H.; Yu, X.; Chen, M.; Li, S. Chattering-free discrete-time sliding mode control. Automatica 2016, 68, 87–91. [Google Scholar] [CrossRef]
- Su, W.; Drakunov, S.; Ozguner, U. An O(T2) boundary layer in sliding mode for sampled-data systems. IEEE Trans. Autom. Control 2000, 45, 482–485. [Google Scholar]
- Ma, H.; Li, Y.; Xiong, Z. Discrete-time sliding-mode control with enhanced power reaching law. IEEE Trans. Ind. Electron. 2019, 66, 4629–4638. [Google Scholar] [CrossRef]
- Ma, H.; Wu, J.; Xiong, Z. Discrete-time sliding-mode control with improved quasi-sliding-mode domain. IEEE Trans. Ind. Electron. 2016, 63, 6292–6304. [Google Scholar] [CrossRef]
- Ma, H.; Wu, J.; Xiong, Z. A novel exponential reaching law of discrete-time sliding-mode control. IEEE Trans. Ind. Electron. 2017, 64, 3840–3850. [Google Scholar] [CrossRef]
- Qu, S.; Xia, X.; Zhang, J. Dynamics of discrete-time sliding-mode-control uncertain systems with a disturbance compensator. IEEE Trans. Ind. Electron. 2014, 61, 3502–3510. [Google Scholar] [CrossRef] [Green Version]
- Eun, Y.; Kim, J.; Kim, K.; Cho, D. Discrete-time variable structure controller with a decoupled disturbance compensator and it application to a CNC servomechanism. IEEE Trans. Control Syst. Technol. 1999, 7, 414–423. [Google Scholar]
- Lei, Y.; Zhang, C.; Huang, J.; Fei, S. Discrete-time sliding-mode switching control scheme with disturbance observer and its application to superheated steam temperature systems. J. Dyn. Syst. Meas. Control Trans. ASME 2016, 138, 101003. [Google Scholar]
- Zhang, J.; Shi, P.; Xia, Y.; Yang, H. Discrete-time sliding mode control with disturbance rejection. IEEE Trans. Ind. Electron. 2019, 66, 7967–7975. [Google Scholar] [CrossRef]
- Gao, W.; Wang, Y.; Homaifa, A. Discrete-time variable structure control systems. IEEE Trans. Ind. Electron. 1995, 42, 117–122. [Google Scholar]


© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Z.; Ma, H.; Song, Q. Comparison of Disturbance Compensators for a Discrete-Time System with Parameter Uncertainty. Appl. Sci. 2020, 10, 6219. https://doi.org/10.3390/app10186219
Guo Z, Ma H, Song Q. Comparison of Disturbance Compensators for a Discrete-Time System with Parameter Uncertainty. Applied Sciences. 2020; 10(18):6219. https://doi.org/10.3390/app10186219
Chicago/Turabian StyleGuo, Zhongyi, Haifeng Ma, and Qinghua Song. 2020. "Comparison of Disturbance Compensators for a Discrete-Time System with Parameter Uncertainty" Applied Sciences 10, no. 18: 6219. https://doi.org/10.3390/app10186219