GPS-Based Indoor/Outdoor Detection Scheme Using Machine Learning Techniques




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:Featured Application
Abstract
1. Introduction
2. Related Work
3. Data Analysis
3.1. Global Positioning System
3.2. Data Analysis
4. I/O Detection Scheme
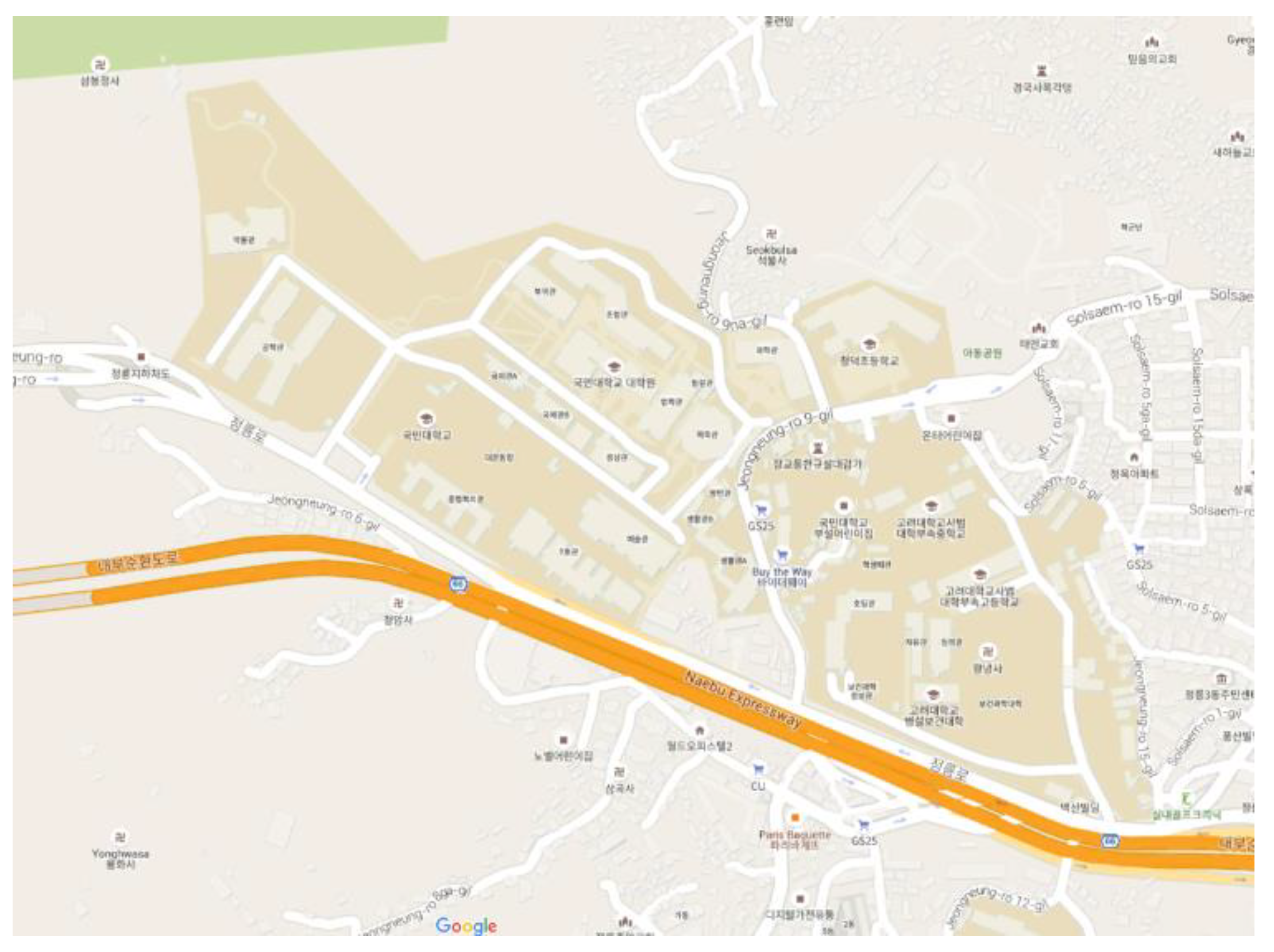
4.1. Data Collection
4.1.1. Data Collection
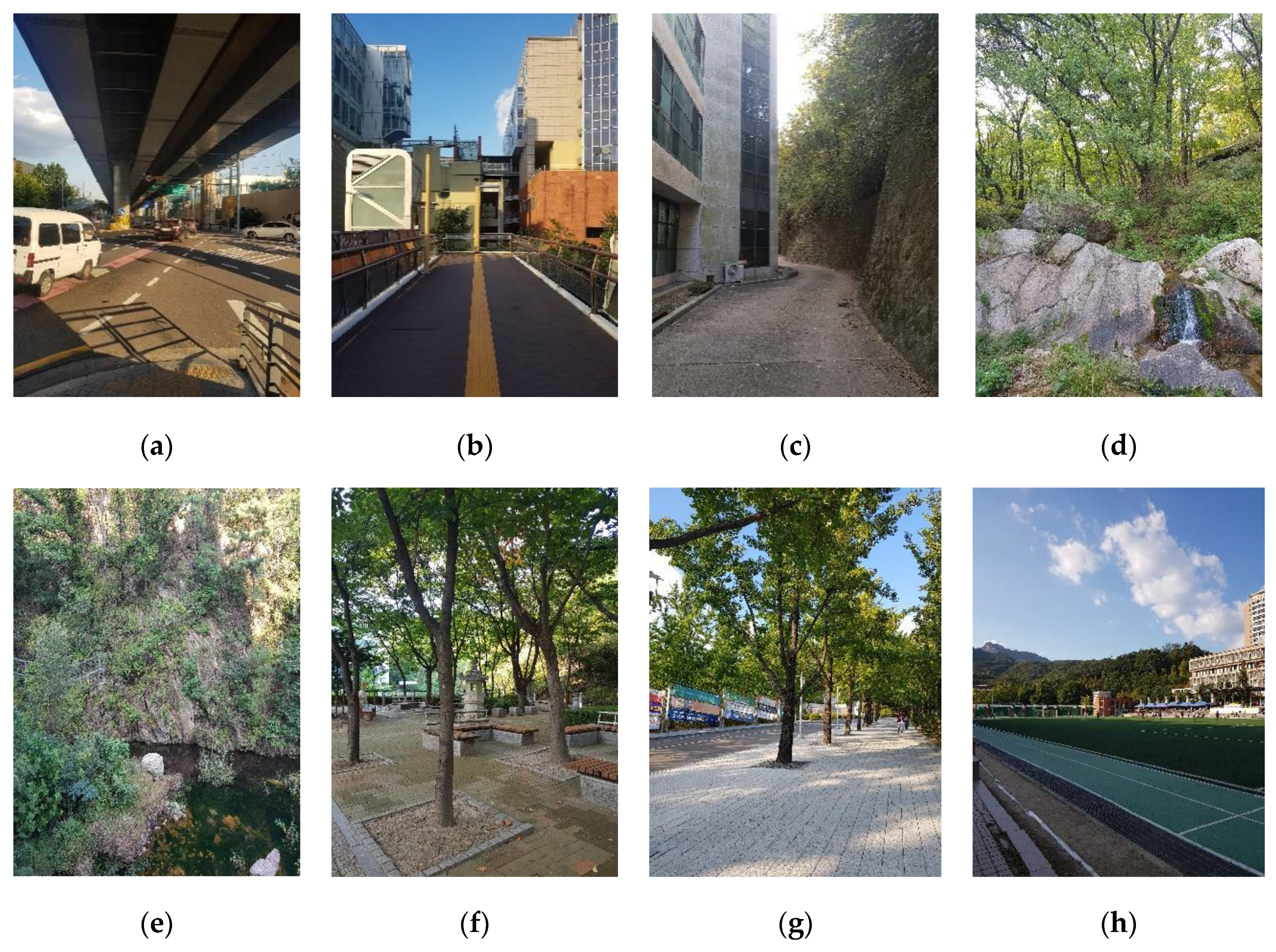
4.1.2. Data Description
4.2. Machine Learning Approaches
4.2.1. Logistic Regression
4.2.2. Naive Bayes Classifier
4.2.3. Support Vector Machine
4.2.4. K-Nearest Neighbors Classifier
4.2.5. Neural Network
4.3. Training Phase
4.4. Testing Phase
5. Evaluation
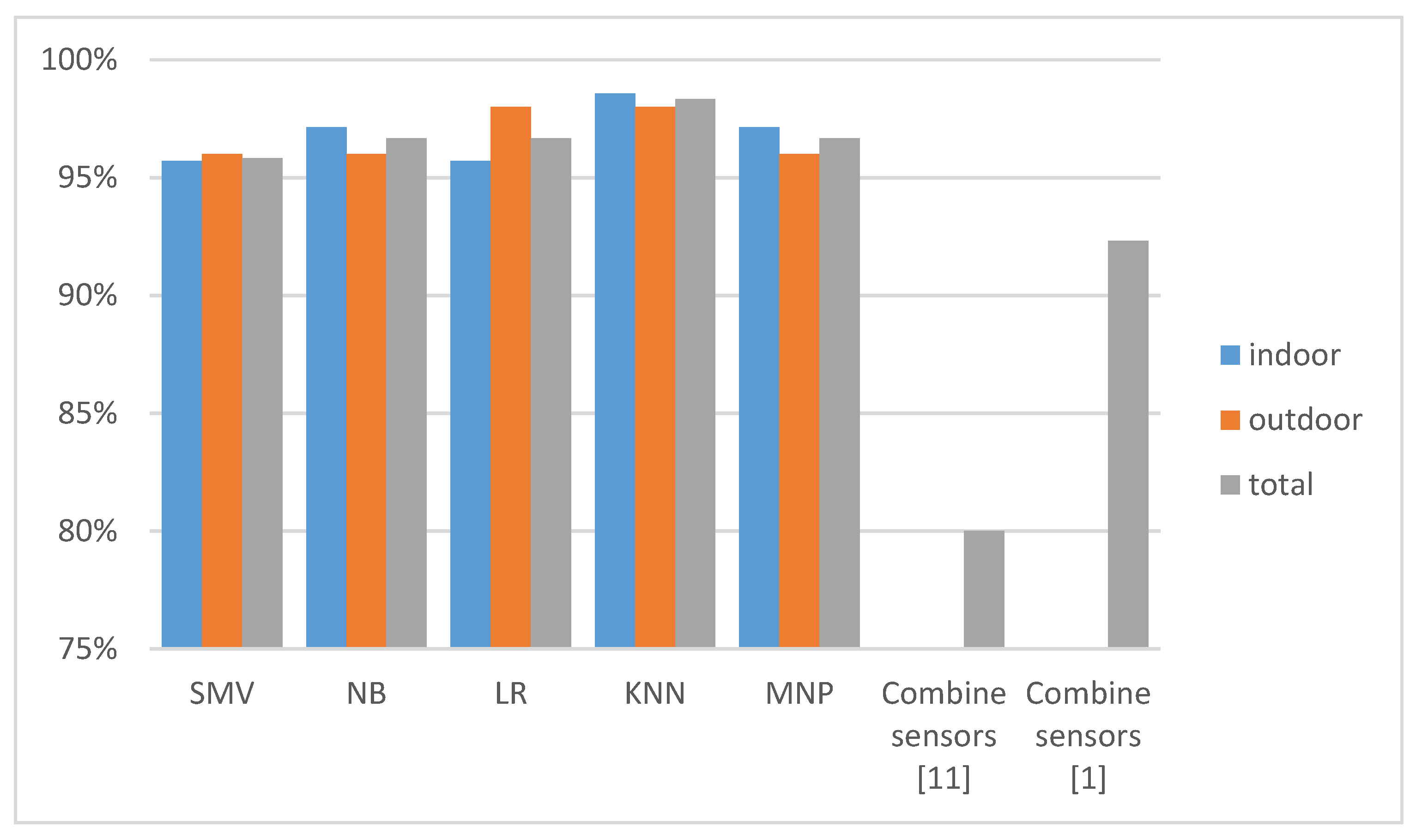
5.1. Testing with Indoor/Outdoor Sample Test Set
5.2. Testing with Indoor/Outdoor and Semi-Indoor Sample Test Set
5.3. Proposed Preprocessing Process
5.4. Testing with Indoor/Outdoor and Semi-Indoor Sample Test Set with Proposed Data Processing
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Radu, V.; Katsikouli, P.; Sarkar, R.; Marina, M.K. A semi-supervised learning approach for robust indoor-outdoor detection with smartphones. In Proceedings of the 12th ACM Conference on Embedded Network Sensor Systems, Memphis, TN, USA, 3–6 November 2014. [Google Scholar]
- Mekki, S.; Karagkioules, T.; Valentin, S. HTTP adaptive streaming with indoors-outdoors detection in mobile networks. arXiv 2017, arXiv:1705.08809. [Google Scholar]
- Carroll, A.; Heiser, G. An analysis of power consumption in a smartphone. In Proceedings of the 2010 USENIX Annual Technical Conference (USENIXATC’10), Boston, MA, USA, 23–25 June 2010. [Google Scholar]
- Jiang, L.; Tan, S.Y. Geometrically Based Statistical Channel Models for Outdoor and Indoor Propagation Environments. IEEE Trans. Veh. Technol. 2007, 56, 3587–3593. [Google Scholar] [CrossRef]
- Global Positioning System. Available online: https://en.wikipedia.org/wiki/Global_Positioning_System (accessed on 21 September 2019).
- Pei, L.; Chen, R.; Chen, Y.; Leppäkoski, H.; Perttula, A. Indoor/Outdoor Seamless Postioning Technologies Integrated on Smart Phone. In Proceedings of the First International Conference on Advances in Satellite and Space Communications, Colmar, France, 20–25 July 2009. [Google Scholar]
- Lipowezky, U.; Vol, I. Indoor-Outdoor Detector for Mobile Phone Cameras Using Gentle Boosting. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, USA, 13–18 June 2010. [Google Scholar]
- AzizyanIonut, M.; Constandache, I.; Roy Choudhury, R. Surround-Sense: Mobile Phone Localization via Ambience Fingerprinting. In Proceedings of the 15th Annual International Conference on Mobile Computing and Networking, Beijing, China, 20–25 September 2009. [Google Scholar]
- Zhou, P.; Zheng, Y.; Li, Z. IODetector: A generic service for indoor outdoor detection. In Proceedings of the 10th ACM Conference on Embedded Network Sensor Systems, 6–9 November 2012. [Google Scholar]
- Anagnostopoulos, T.; Garcia, J.C.; Goncalves, J.; Ferreira, D.; Hosio, S.; Kostakos, V. Environmental exposure assessment using indoor/outdoor detection on smartphones. Pers. Ubiquitous Comput. 2017, 21, 761–773. [Google Scholar] [CrossRef]
- Capurso, N.; Song, T.; Cheng, W.; Yu, J.; Cheng, X. An Android-Based Mechanism for Energy Efficient Localization Depending on Indoor/Outdoor Context. IEEE Internet Things J. 2017, 4, 299–307. [Google Scholar] [CrossRef]
- Shengnan; Qin, L.; Song, H. A lightweight and aggregated system for indoor/outdoor detection using smart devices. Future Gener. Comput. Syst. 2017. [Google Scholar] [CrossRef]
- Chen, K.; Tan, G. SatProbe: Low-energy and fast indoor/outdoor detection based on raw GPS processing. In Proceedings of the IEEE INFOCOM 2017—IEEE Conference on Computer Communications, Atlanta, GA, USA, 1–4 May 2017. [Google Scholar]
- Iwata, S.; Ishikawa, K.; Takayama, T.; Yanagisawa, M.; Togawa, N. A Robust Indoor/Outdoor Detection Method based on Sparse GPS Positioning Information. In Proceedings of the IEEE 8th International Conference on Consumer Electronics, Berlin, Germany, 2–5 September 2018. [Google Scholar]
- Femminella, M.; Reali, G. A Zero-Configuration Tracking System for First Responders Networks. IEEE Syst. J. 2015, 11, 2917–2928. [Google Scholar] [CrossRef]
- What Is GPS? Available online: https://www.loc.gov/rr/scitech/mysteries/global.html (accessed on 28 January 2018).
- Available online: https://web.archive.org/web/20181231195431/https://www.youtube.com/watch?v=ozAPGnr-934. (accessed on 17 June 2017).
- Daly, P. Navstar GPS and GLONASS: Global satellite navigation systems. Acta Astronaut. 1991, 25, 399–406. [Google Scholar] [CrossRef]
- Space Segment GPS.GOV. Available online: https://web.archive.org/web/20190718190908/https://www.gps.gov/systems/gps/space/ (accessed on 14 September 2019).
- Alkan, R.M.; Karaman, H.; Sahin, M. GPS, GALILEO and GLONASS satellite navigation systems & GPS modernization. In Proceedings of the 2nd International Conference on Recent Advances in Space Technologies (RAST 2005), Istanbul, Turkey, 9–11 June 2005. [Google Scholar]
- Van Diggelen, F.; Abraham, C.; de Salas, J.; Silva, B. Insidegnss. BROADCOM CORPORATION. Available online: https://www.insidegnss.com/auto/marapr11-VanDiggelenREV.pdf (accessed on 7 December 2019).
- Cramer, J.S. The Origins of Logistic Regression; Tinbergen Institute Working; Tinbergen Institute: Amsterdam, The Netherland, 2002; pp. 167–178. [Google Scholar]
- Rish, I. An Empirical Study of the Naive Bayes Classifie. In Proceedings of the IJCAI Workshop on Empirical Methods in AI, Seattle, WA, USA, 4 August 2001. [Google Scholar]
- Russell, S.; Norvig, P. Artificial Intelligence: A Modern Approach; Prentice Hall: Upper Saddle River, NJ, USA, 2010. [Google Scholar]
- Altman, N.S. An introduction to kernel and nearest-neighbor nonparametric regression. Am. Stat. 1992, 46, 175–185. [Google Scholar]











© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bui, V.; Le, N.T.; Vu, T.L.; Nguyen, V.H.; Jang, Y.M. GPS-Based Indoor/Outdoor Detection Scheme Using Machine Learning Techniques. Appl. Sci. 2020, 10, 500. https://doi.org/10.3390/app10020500
Bui V, Le NT, Vu TL, Nguyen VH, Jang YM. GPS-Based Indoor/Outdoor Detection Scheme Using Machine Learning Techniques. Applied Sciences. 2020; 10(2):500. https://doi.org/10.3390/app10020500
Chicago/Turabian StyleBui, Van, Nam Tuan Le, Thanh Luan Vu, Van Hoa Nguyen, and Yeong Min Jang. 2020. "GPS-Based Indoor/Outdoor Detection Scheme Using Machine Learning Techniques" Applied Sciences 10, no. 2: 500. https://doi.org/10.3390/app10020500
APA StyleBui, V., Le, N. T., Vu, T. L., Nguyen, V. H., & Jang, Y. M. (2020). GPS-Based Indoor/Outdoor Detection Scheme Using Machine Learning Techniques. Applied Sciences, 10(2), 500. https://doi.org/10.3390/app10020500