1. Introduction
A dacriocistorrynostomy (DCR) is an ocular surgery that removes the obstruction on the nasal lacrimal, allowing a normal draining to the nasal cavity trough a new drainage via [
1,
2]. The DCR is the most common surgical technique in lacrimal blockage in cases of chronic dacryocystitis and nasolacrimal duct [
1,
2,
3]. General Hospital of Mexico City estimates that, from 2000 to 2007, 222 dacricistitys cases were diagnosed, and 194 of those were treated by a type of DCR [
4,
5].
During a DCR, an incision between the ocular cavity and the nasal apparatus is performed [
1,
6,
7]. The incision consists on a tangential cut of 2–4 cm of length and its complemented by scissors to get inside to the nasal bone [
6,
8,
9]. Once the incision depth is achieved, it is open by the use of manual retractors until the lacrimal sac is founded [
8,
10].
Table 1 shows principal instruments used in the stage of retraction incision in a DCR. The retraction, identification, exposure of tissues, and skin are crucial steps in a DCR that allow for a workspace and mobility needed by the surgeon [
9,
10].
A DCR is considered safe, with low aesthetic repercussions and a high rate of success [
1,
2,
11]. The effectiveness rate of a DCR is 85%, but the group valuation shows 71% effectiveness in DCR in both eyes [
4,
7,
12]. The problems are related with the workspace (≃2 cm) in which It is necessary to liberate a minimum area to introduce the instruments in
Table 1 [
4,
8]. In this process, the surgeon requires assistance of other surgeons for the incision retraction, the tissue manipulation, and the incision drainage. The incision retraction is the longest process in a DCR.
Given the anatomical differences of each patient, It is required that both the surgeon and the assistant must have knowledge in canalicular pathologies, the use of medical tools, and a high level of skills for manipulation of tissues and skin in reduced spaces [
2]. The most common complications are bleeding and a broken nasal flap, which generate complications for the patient and the specialist [
13].
A DCR needs the availability of 3–5 expert surgeons on lacrimal surgery for a single procedure [
7]. These needs increase costs, surgery time and risk for the patient [
4]. This problem generates a need to develop a Robotic Retraction System (RRS), which retracts the incision automatically, assists with problems of the workspace for the incision and therefore reduces the number of specialists required.
The construction and design of an RRS start on the determination of the mechanical skin behavior during the stage of manipulation and retraction of the incision in a DCR. This behavior generates the design specifications for a RRS. The theoretical and experimental results of forces, pressures, deformations, tensions, and workspace area derived from the opening of incisions in a DCR are presented in this article. These results are considered the design specifications needed in the construction of a incision retractor, and it was recollected in an experimental form with the reproduction of the skin retraction of a pig’s head’s measuring forces of lengths simulating a typical dacriocistorrynostomy [
14,
15].
The experimental information allows for developing a mathematical model that replicates the incisions’ interactions and behavior during its manipulation in a surgery [
16,
17]. The incision replication presented is based on the mechanical characteristics of the multilayer composite of skin.
The geometrical incision behavior is related to the opening points. In a DCR, the opening points are limited with the workspace and the minimum retraction points needed for a homogeneous workspace area are three. The skin can be viewed as a multi-layer shell structure with non-negligible bending stiffness [
15,
18]. It contains fibers contributing to the tensile mechanical properties of the skin and leads to anisotropic and nonlinear macroscopic mechanical properties observed in biological soft tissues under tension [
18]. The mechanical behavior of skin can be considered as an anisotropic tissue in the structural characteristics and its layers correlated with the Langer lines [
14,
15,
18]. On a 3D structure, the skin has distinct mechanical properties [
18].
A variety of methods have been used to measure the mechanical properties of skin and those consider nonlinear behavior, structural non-homogeneity, and mechanical anisotropy, but this is not developed in the skin incision retraction [
18,
19]. The external forces applied at the incision could be considered similar to the tensions in the skin without any cut; therefore, this mathematical model will consider the same tensor behavior [
20].
The external forces applied at the skin will be obtained experimentally relating the force applied with the skin length retracted in time. Due to difficulties of measuring human skin on the ocular zone, it is necessary to replicate the mechanical behavior with
tissue surrogates [
18].
Rat and pig animal skin has been the most common replacement for human skin and the pig skin has been shown to be a suitable mechanical properties(Young’s Modulus) for human skin [
14,
15,
18]. In order to simplify the problem, the incision is considered an underlying material that suffers stress as there is a continuous disregard for its molecular structure; this is called the
mechanics of a continuous medium. This type of mechanics can relate stresses and deformations with lengths and forces [
20,
21,
22].
The stress vector can be simplified into two components: the normal component (
) and tangential plane (
). The Mohr’s circle is a geometrical representation of solid stresses subdued by external forces [
21].
Another graphic representation on a tensor is called the Lamé ellipse, which relates the stress tensor into an ellipse. In a Lamé ellipse, the stress tensor has a canonic form and the main stress comes in the diagonal matrix (
) with the points outside the diagonal being null [
20,
22]. These graphic methods will be used for the mathematical modeling in the incision retraction process. The retraction points could have an opening radio similar to a Mohr’s circle [
21]. The three retraction points expand geometrically similar to a Lamé ellipse [
21].
Figure 1 shows the incision geometrical behavior in the retraction process.
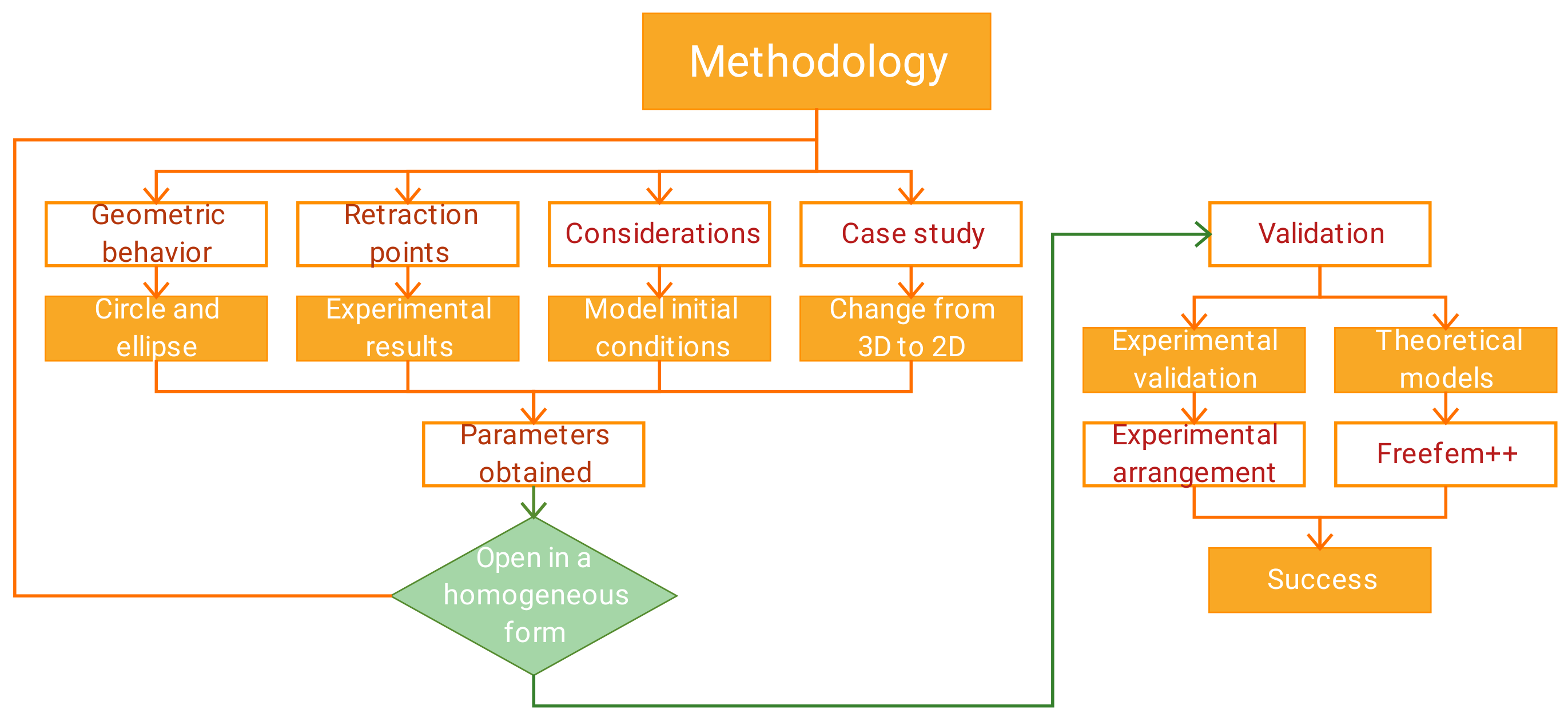
The mathematical model gives the design parameters needed for the design of an RRS. In sections are presented as follows: the design specifications for the construction of a retractor, the mathematical model, and the theoretical and experimental validations in the opening of the incisions in the orbital cavity of a pig’s head.

 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}