Study on the Shifting Quality of the CVT Tractor under Hydraulic System Failure

Abstract
:1. Introduction
2. Principle of Hydrostatic Power Split CVT
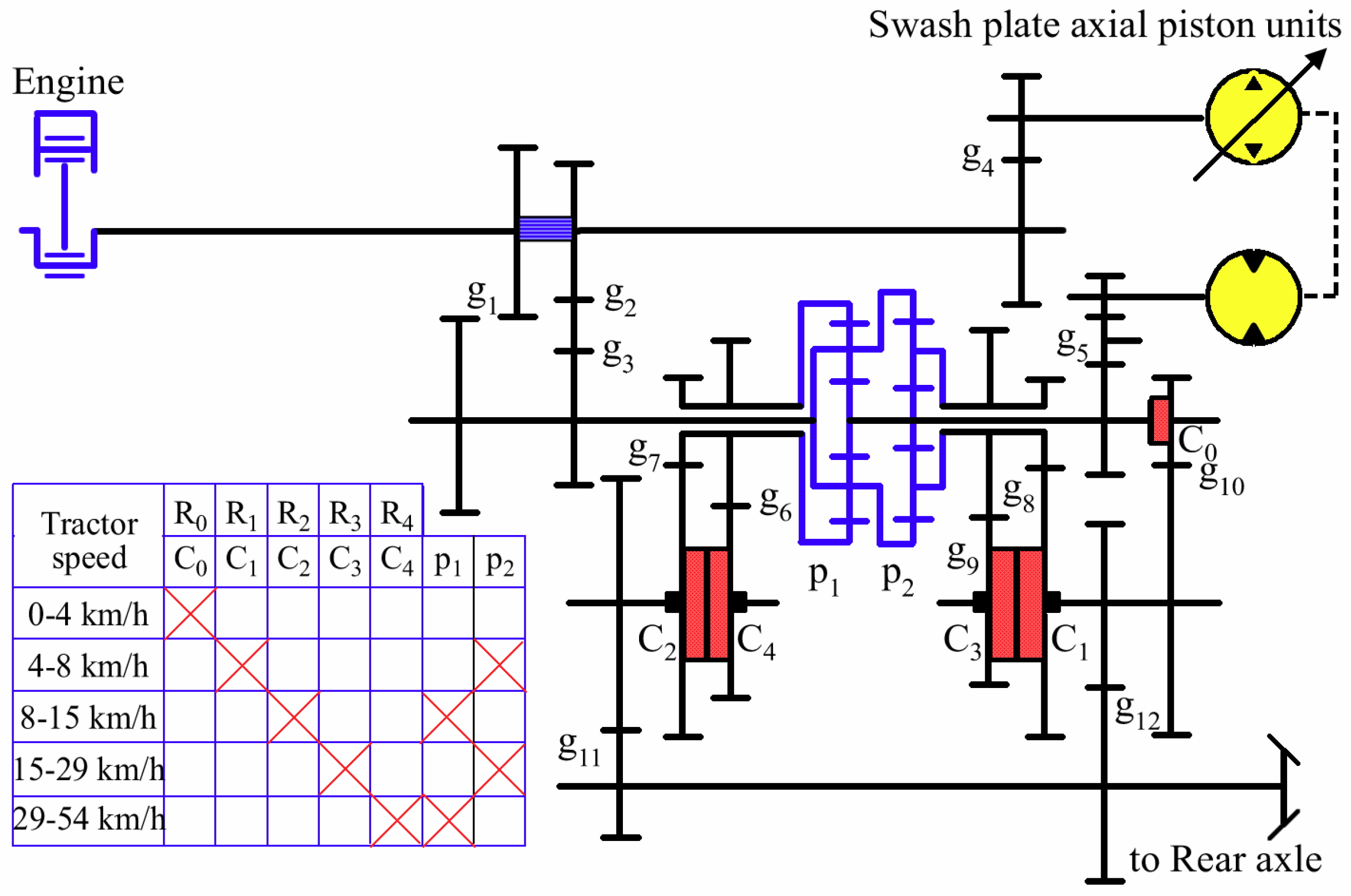
2.1. Analysis of the Transmission System
2.2. Basic Transmission Equations
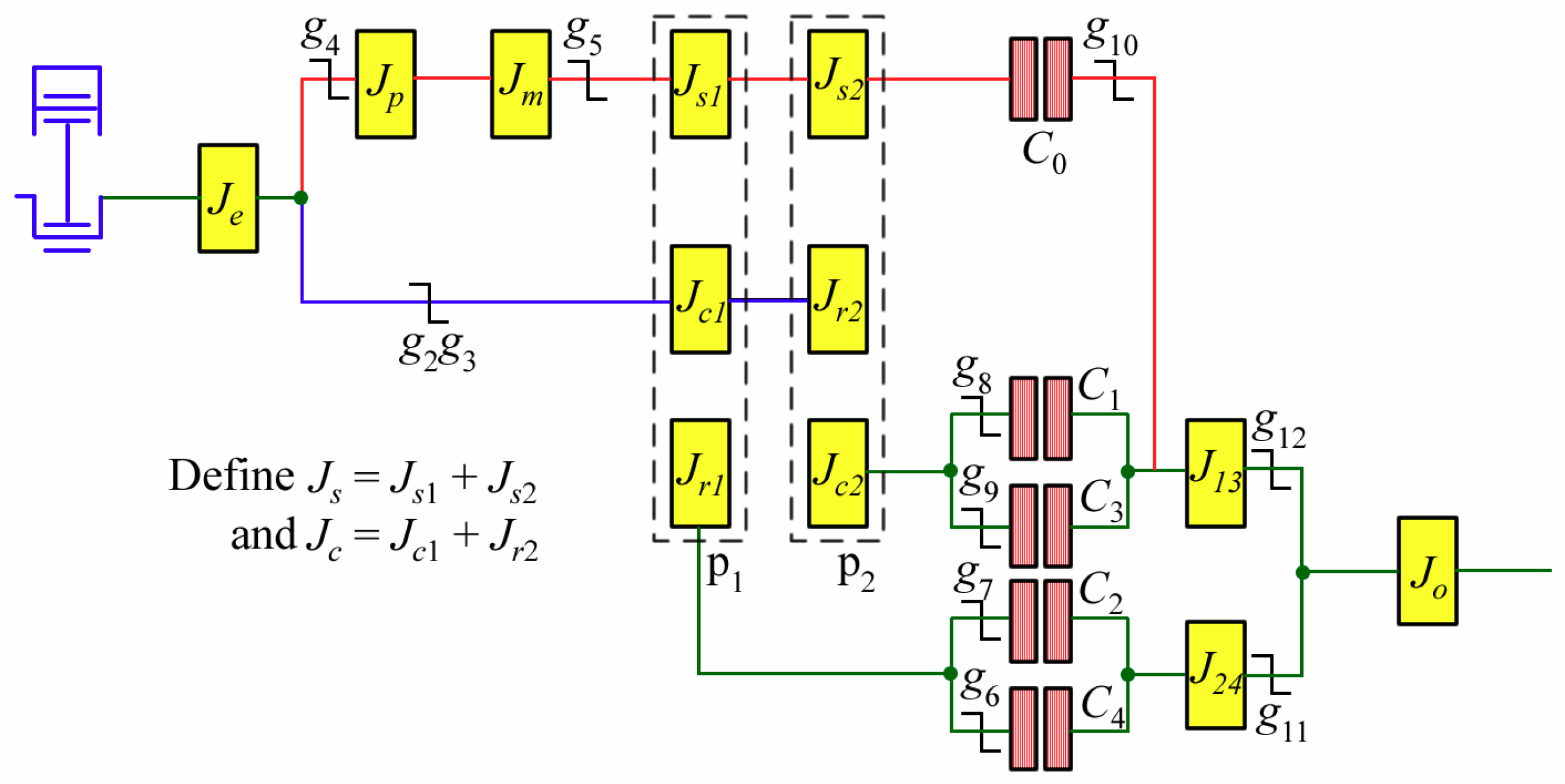
3. Construction of the Shifting Dynamics Model
3.1. Model of Swash Plate Axial Piston Units
3.2. Model of the Gear
3.3. Model of the Shaft
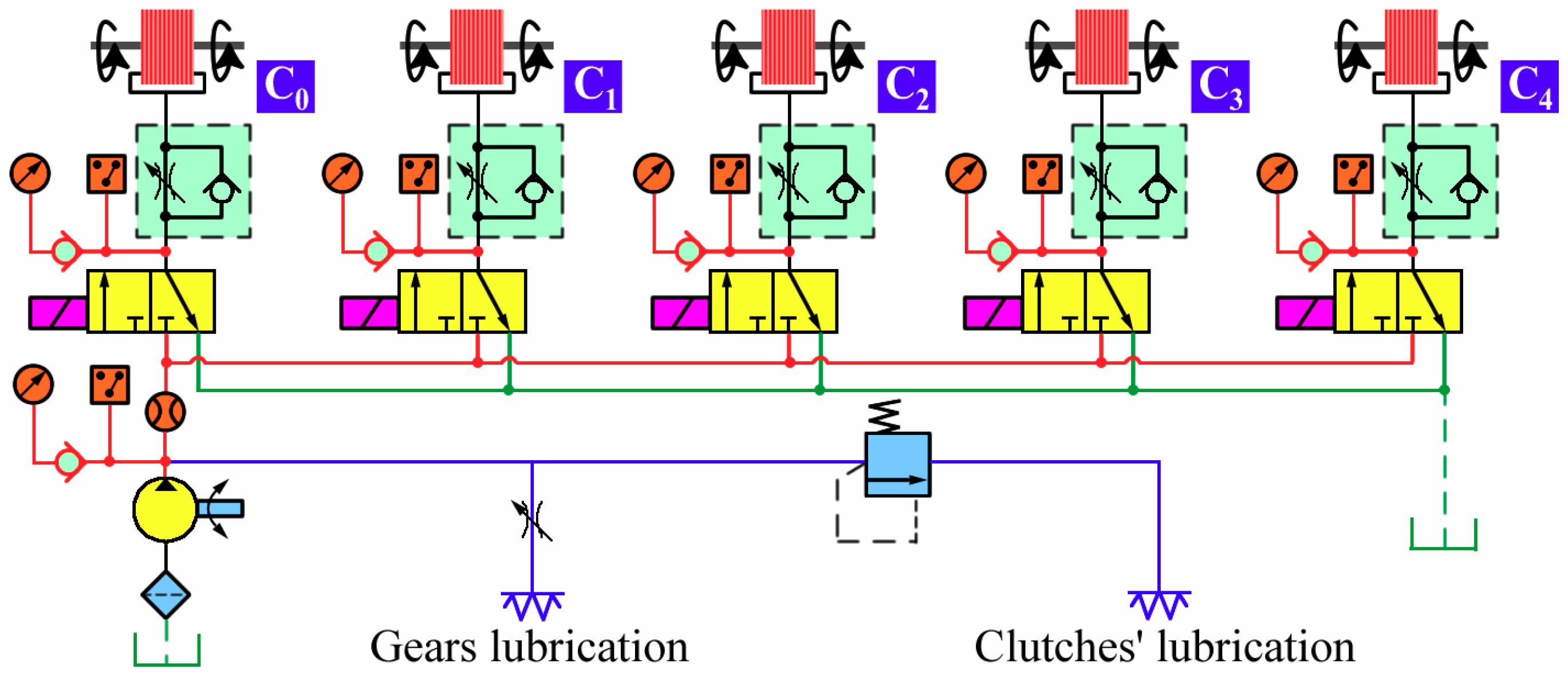
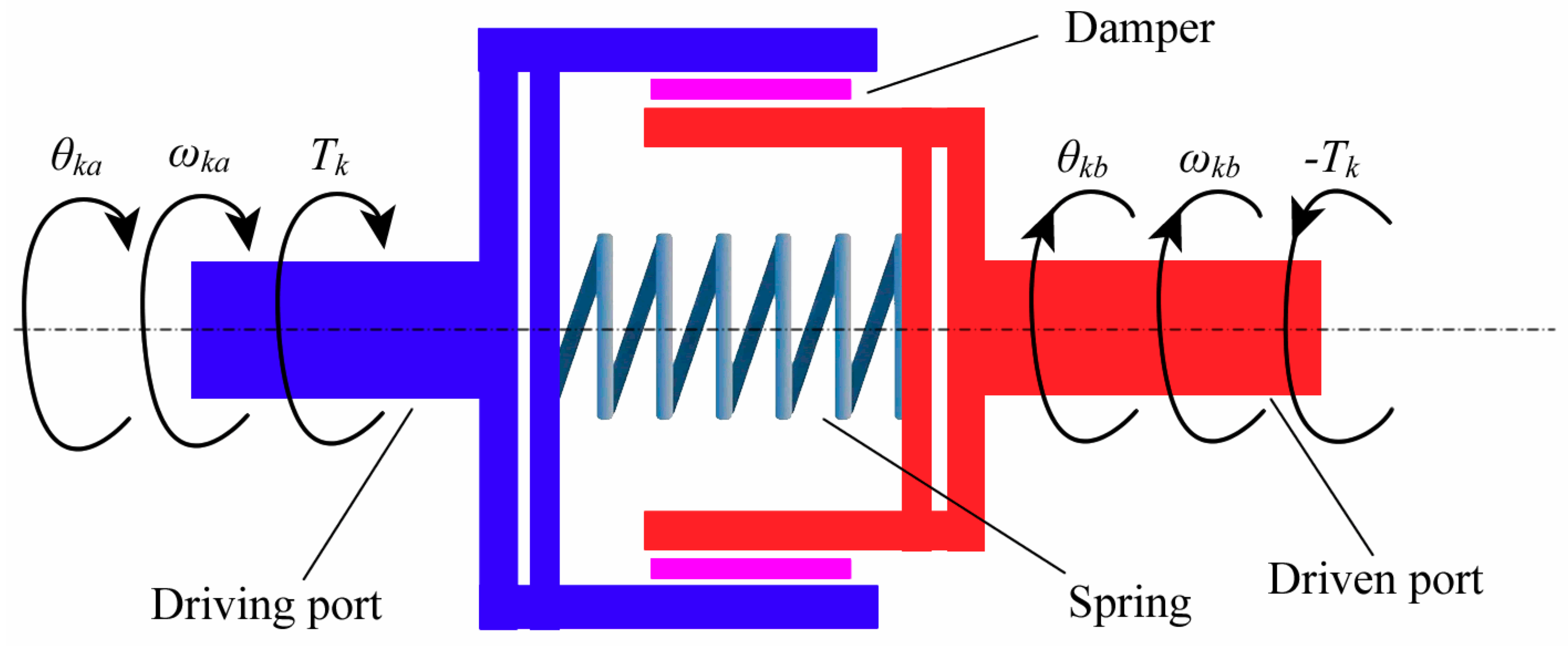
3.4. Model of the Clutch
3.5. Model of Tractor
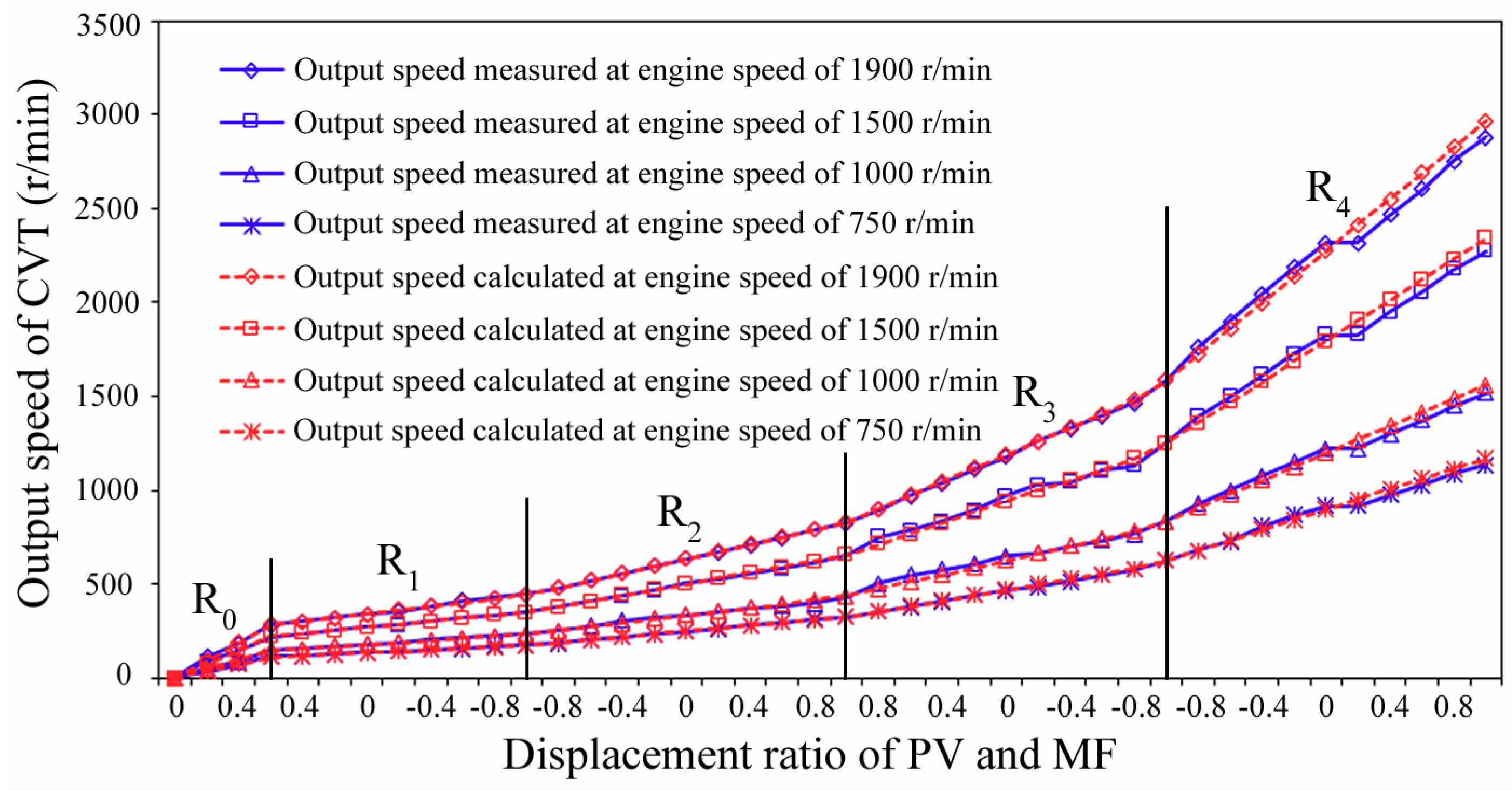
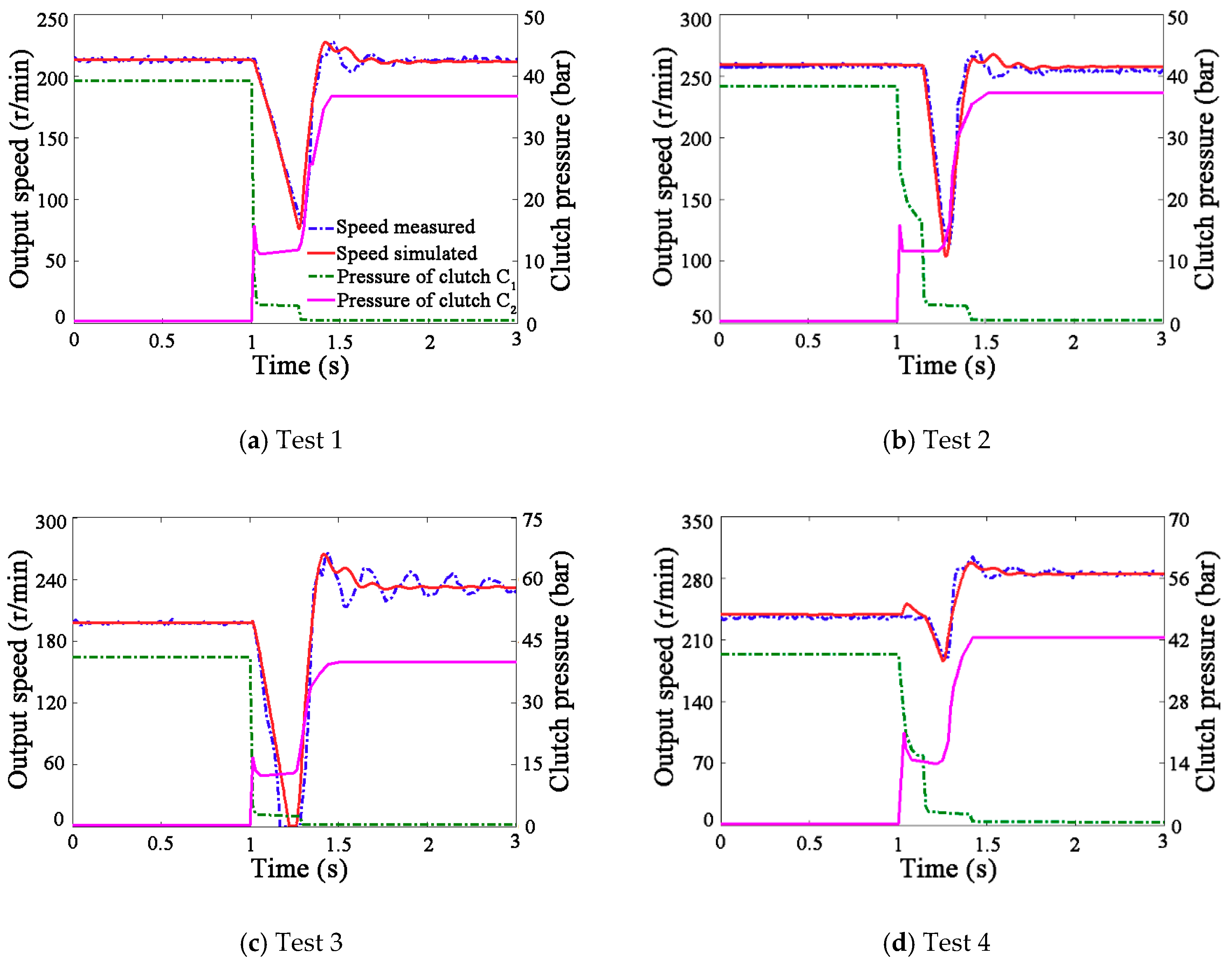
3.6. Test Verification
4. Fault Simulation and Analysis
4.1. Fault Simulation
4.2. Evaluation Indexes of Shifting Quality
4.3. Simulation Conditions and Parameters
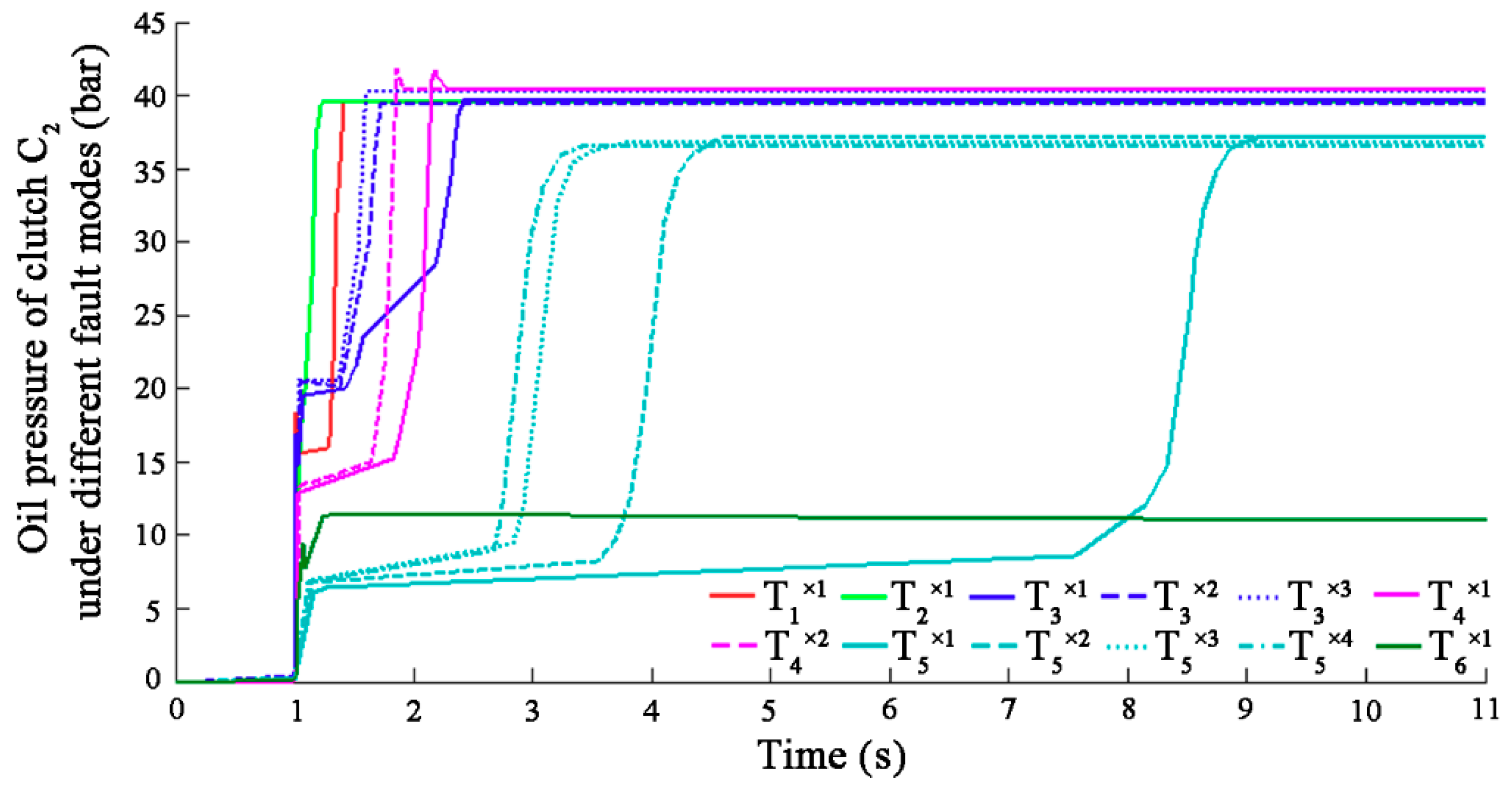
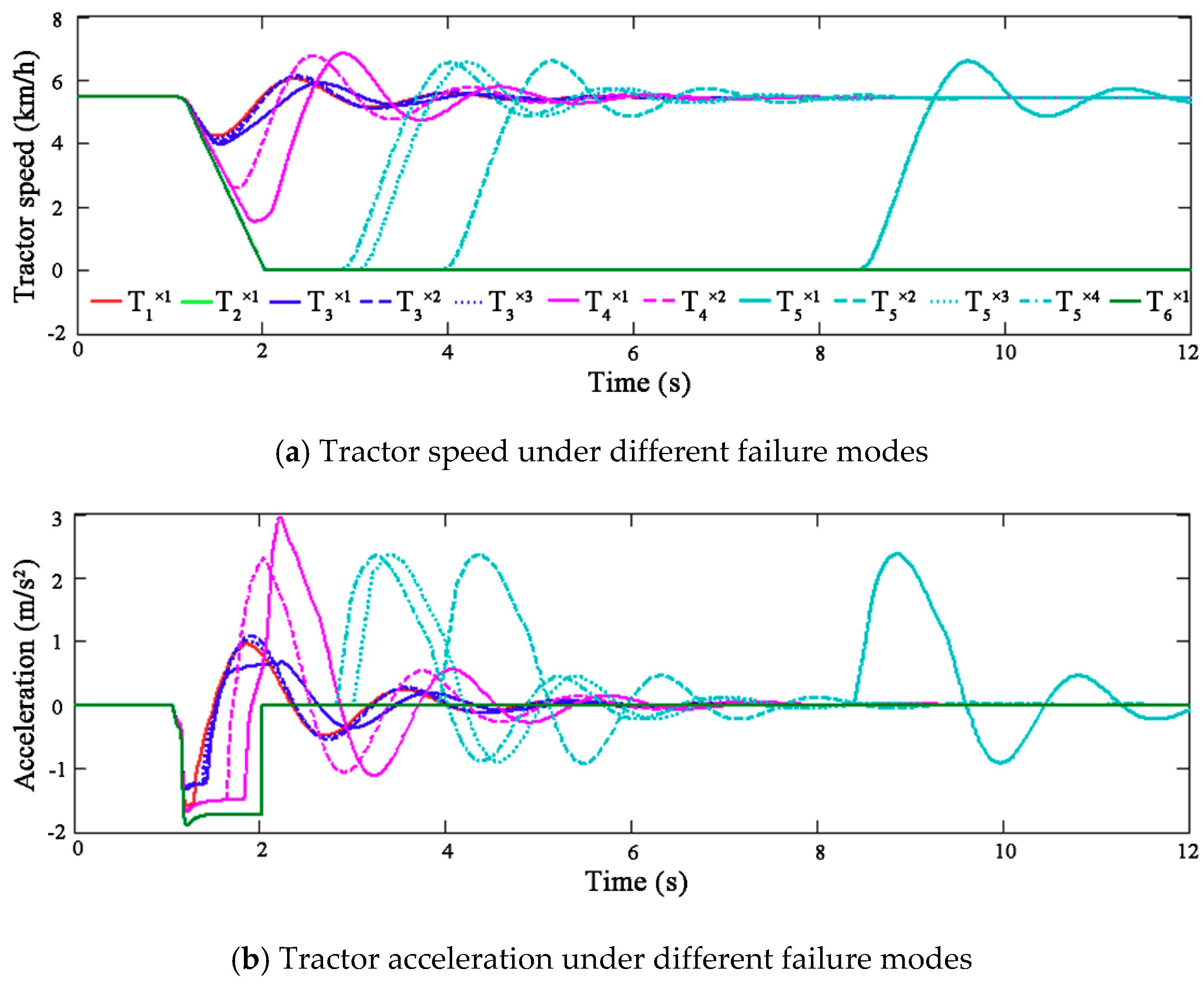
4.4. Effect of Failure Mode on Shifting Quality
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xia, Y.; Sun, D. Characteristic analysis on a new hydro-mechanical continuously variable transmission system. Mech. Mach. Theory 2018, 126, 457–467. [Google Scholar] [CrossRef]
- Renius, K.T.; Resch, R. Continuously variable tractor transmissions. In Proceedings of the Agricultural Equipment Technology Conference, Louisville, KY, USA, 14–16 February 2005; ASAE: Joseph, MI, USA, 2005; pp. 1–37. [Google Scholar]
- Rossetti, A.; Macor, A.; Benato, A. Impact of control strategies on the emissions in a city bus equipped with power-split transmission. Transp. Res. Part D 2017, 50, 357–371. [Google Scholar] [CrossRef]
- Rossetti, A.; Macor, A. Multi-objective optimization of hydro-mechanical power split transmissions. Mech. Mach. Theory 2013, 62, 112–128. [Google Scholar] [CrossRef]
- Ni, X.; Zhu, S.; Ouyang, D.; Chang, Y.; Wang, G.; Thinh, N.V. Design and experiment of hydro-mechanical CVT speed ratio for tractor. Trans. Chin. Soc. Agric. Mach. 2013, 44, 15–20. [Google Scholar]
- Li, B.; Sun, D.; Hu, M.; Zhou, X.; Liu, J.; Wang, D. Coordinated control of gear shifting process with multiple clutches for power-shift transmission. Mech. Mach. Theory 2019, 140, 274–291. [Google Scholar] [CrossRef]
- Oh, J.; Park, J.; Cho, J.; Kim, J.; Kim, J.; Lee, G. Influence of a clutch control current profile to improve shift quality for a wheel loader automatic transmission. Int. J. Precis. Eng. Manuf. 2017, 18, 211–219. [Google Scholar] [CrossRef]
- Raikwar, S.; Tewari, V.K.; Mukhopadhyay, S.; Verma, C.R.B.; Rao, M.S. Simulation of components of a power shuttle transmission system for an agricultural tractor. Comput. Electron. Agric. 2015, 114, 114–124. [Google Scholar] [CrossRef]
- Hajjaji, A.E.; Chadli, M.; Oudghiri, M.; Pages, O. Observer-based robust fuzzy control for vehicle lateral dynamics. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; pp. 4664–4669. [Google Scholar]
- Wang, R.; Jing, H.; Hu, C.; Chadli, M.; Yan, F. Robust H∞ output-feedback yaw control for in-wheel motor driven electric vehicles with differential steering. Neurocomputing 2016, 173, 676–684. [Google Scholar] [CrossRef]
- Wang, G.; Chadli, M.; Chen, H.; Zhou, Z. Event-triggered control for active vehicle suspension systems with network-induced delays. J. Frankl. Inst. 2019, 356, 147–172. [Google Scholar] [CrossRef]
- Repin, S.; Evtiukov, S.; Maksimov, S. A method for quantitative assessment of vehicle reliability impact on road safety. Transp. Res. Procedia 2018, 36, 661–668. [Google Scholar] [CrossRef]
- Feng, G.; Hou, Y.; Sun, H. Simulation analysis of the gear shift buffer of the armored vehicles. Comput. Simul. 2018, 35, 7–11. [Google Scholar]
- Wei, C.; Ma, Z.; Yin, X.; Zhao, J.; Li, X. Research on the influencing factors of the range-shifting impact on HMT. Trans. Beijing Inst. Technol. 2015, 35, 1122–1127. [Google Scholar]
- Zhang, M.; Hao, X.; Yin, Y. Neural network PID control for mulit-range hydro-mechanical continuously variable transmission in tractors. J. Henan Polytech. Univ. 2017, 36, 93–98. [Google Scholar]
- Wang, G.; Zhu, S.; Shi, L.; Wang, S.; Zhang, H.; Nguyen, V. Control and interaction system for tractor hydro-mechanical CVT. Trans. Chin. Soc. Agric. Mach. 2015, 46, 1–7. [Google Scholar]
- Park, S.; Kim, S.; Choi, J.H. Gear fault diagnosis using transmission error and ensemble empirical mode decomposition. Mech. Syst. Signal Process. 2018, 108, 262–275. [Google Scholar] [CrossRef]
- Huang, Y.; Huang, C.; Ding, J.; Liu, Z. Fault diagnosis on railway vehicle bearing based on fast extended singular value decomposition packet. Measurement 2019, in press. [Google Scholar] [CrossRef]
- Chang, X.; Tang, B.; Tan, Q.; Deng, L.; Zhang, F. One-dimensional fully decoupled networks for fault diagnosis of planetary gearboxes. Mech. Syst. Signal Process. 2019, in press. [Google Scholar] [CrossRef]
- Rao, Z. Design of Planetary Gear Transmission, 1st ed.; Chemical Industry Press Co., Ltd.: Beijing, China, 2003; p. 27. [Google Scholar]
- Shi, J. Design of Hydro-Mechanical Continuously Variable Transmission Used on the Unroad Vehicle and Research on the Control System of Variable Pump. Master’s Thesis, Nanjing Agricultural University, Nanjing, China, April 2012. [Google Scholar]
- Walker, P.; Zhu, B.; Zhang, N. Powertrain dynamics and control of a two speed dual clutch transmission for electric vehicles. Mech. Syst. Signal Process. 2017, 85, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Meng, F.; Tao, G.; Chen, H. Smooth shift control of an automatic transmission for heavy-duty vehicles. Neurocomputing 2015, 159, 197–206. [Google Scholar] [CrossRef]
- Zhao, Z.; Jiang, S.; Ni, R.; Fu, S.; Han, Z.; Yu, Z. Fault-tolerant control of clutch actuator motor in the upshift of 6-speed dry dual clutch transmission. Control Eng. Pract. 2020, 95, 104268. [Google Scholar] [CrossRef]
- Iqbal, S.; Bender, F.A.; Ompusunggu, A.P.; Pluymers, B.; Desmet, W. Modeling and analysis of wet friction clutch engagement dynamics. Mech. Syst. Signal Process. 2015, 60, 420–436. [Google Scholar] [CrossRef]
- ITI GmbH. ITI SimulationX Help Manual; ITI GmbH: Dresden, Germany, 2012. [Google Scholar]
- Xu, X.; Han, X.; Liu, Y.; Liu, Y.; Liu, Y. Modeling and dynamic analysis on the direct operating solenoid valve for improving the performance of the shifting control system. Appl. Sci. 2017, 7, 1266. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Abel, A.; Todtermuschke, K.; Zhang, T. Hybrid vehicle power transmission modeling and simulation with SimulationX. In Proceedings of the International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 1710–1717. [Google Scholar]
- Tai, J. Design of the 2×2 Type HMCVT of Large Power Tractor and Study on the Shift Quality of HMCVT. Master’s Thesis, Shandong Agricultural University, Taian, China, June 2017. [Google Scholar]
- Duncan, J.R.; Wegscheid, E.L. Determinants of off-road vehicle transmission ‘shift quality’. Appl. Ergon. 1985, 16, 173–178. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Name | Model | Parameter | Manufacturer |
|---|---|---|---|---|
| 1 | Diesel engine | WP6T180E21 | Rated power: 132.5 kW Rated speed: 2200 r/min | Weichai Power |
| 2 | Hydrostatic power split CVT | - | Rated power: 132.5 kW Transmission ratio: 0.687–8.585 | Self-development |
| 3 | Magnetic powder brake | CZ50 | Braking torque: 500 N·m | Hangyu |
| 4 | Speed sensor | JC3A | Speed range: 0–3000 r/min | Xiangyi |
| 5 | Oil pressure sensor | NS-F | Pressure range: 0–100 bar | Tianmu |
| No. | Limited Flow (L/min) | Pump Displacement | Shift Timing Sequence (s) | Engine Speed (r/min) | Load (N·m) |
|---|---|---|---|---|---|
| 1 | 4 | 1 | 0 | 900 | 150 |
| 2 | 4 | 1 | 0.15 | 1100 | 300 |
| 3 | 5 | 0.7 | 0 | 900 | 300 |
| 4 | 5 | 0.7 | 0.15 | 1100 | 150 |
| i2 | i3 | i4 | i5 | i7 | i8 | i11 | i12 | k1 | k2 |
|---|---|---|---|---|---|---|---|---|---|
| 0.97 | 1.48 | 0.68 | 1.96 | 3.52 | 2.77 | 0.82 | 1.09 | 2.56 | 3.56 |
| Je | Jp | Jm | Js | Jc | Jr1 | Jc2 | J13 | J24 | J0 |
|---|---|---|---|---|---|---|---|---|---|
| 0.125 | 0.005 | 0.005 | 0.157 | 0.509 | 0.530 | 0.664 | 0.788 | 0.463 | 0.321 |
| μ0 | μs | M1 | M2 | M3 | np | ro (mm) | ri (mm) |
|---|---|---|---|---|---|---|---|
| 0.11 | 0.07 | 0.85 | 0.08 | 0.0004 | 10 | 198 | 165 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, G.; Song, Y.; Wang, J.; Chen, W.; Cao, Y.; Wang, J. Study on the Shifting Quality of the CVT Tractor under Hydraulic System Failure. Appl. Sci. 2020, 10, 681. https://doi.org/10.3390/app10020681
Wang G, Song Y, Wang J, Chen W, Cao Y, Wang J. Study on the Shifting Quality of the CVT Tractor under Hydraulic System Failure. Applied Sciences. 2020; 10(2):681. https://doi.org/10.3390/app10020681
Chicago/Turabian StyleWang, Guangming, Yue Song, Jiabo Wang, Wanqiang Chen, Yunlian Cao, and Jinxing Wang. 2020. "Study on the Shifting Quality of the CVT Tractor under Hydraulic System Failure" Applied Sciences 10, no. 2: 681. https://doi.org/10.3390/app10020681