Improvement of Diagnostic Parameters of a Rolling Wheel with Flat Spot and Experimental Test on Lithuanian Railways


Abstract
:1. Introduction
2. Problem Formulation
2.1. Description
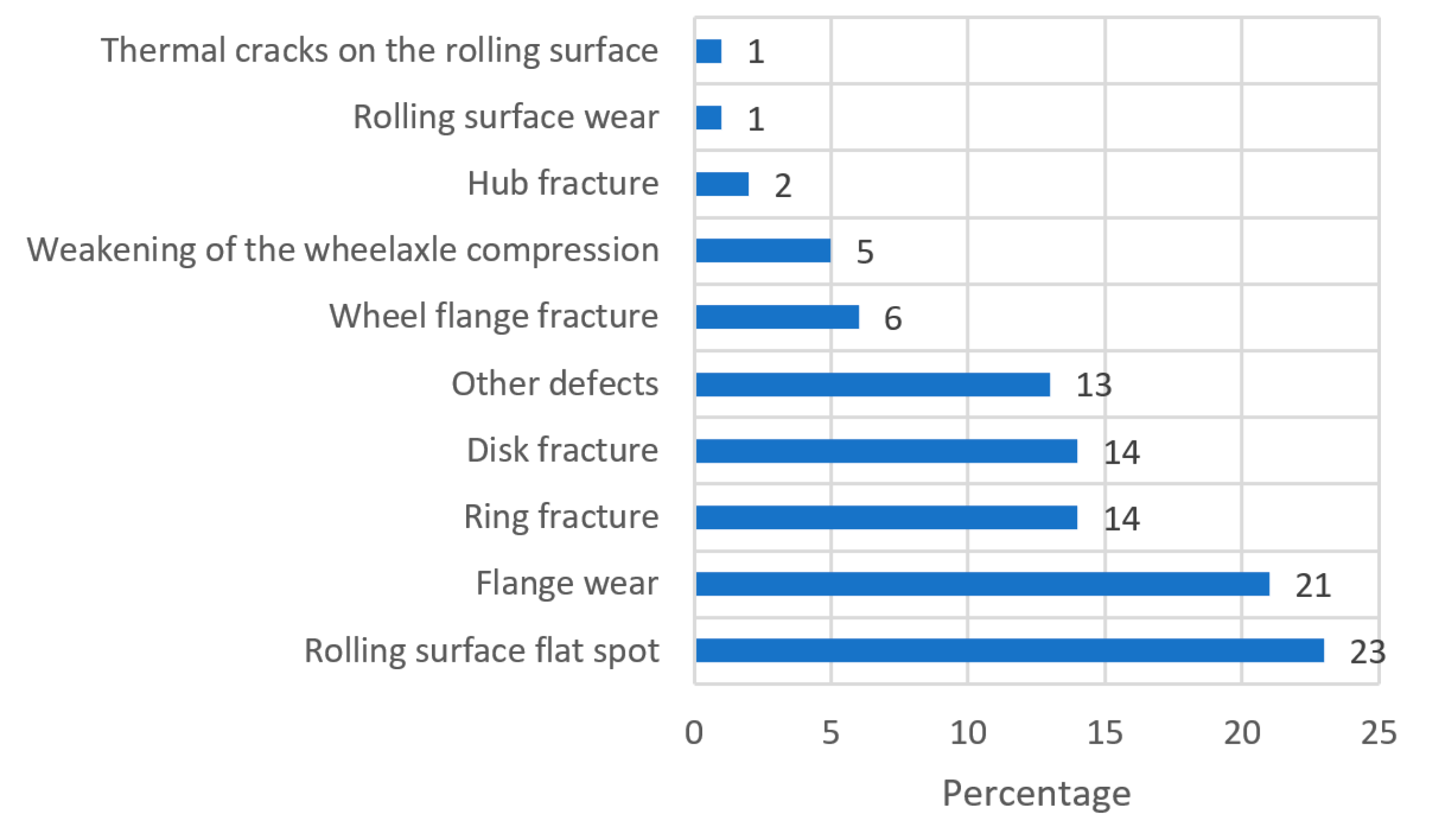
2.2. Risks Arising in the Structural Elements of the Rolling Stock and on the Track That Are Affected by Wheels with Geometrical Defects
- To review the automatic rolling stock control systems used to evaluate the rolling stock wheel condition, comparing their culling criteria;
- To describe the methodology for setting a new parameter for detecting wheel damage instead of the previous parameter and for modernization of the operational algorithms of the ATLAS-LG software where reverse Laplace transformation was used to develop the mathematical model of the system, and where the mathematical model of the wheel with flat surface was derived through frequency characteristics;
- To describe the testing and trial program of the new parameter of the modernized ATLAS LG software;
- To check the implemented modifications and the reliability of setting the new derived parameter for discarding, using practical experiments and registering the testing results;
- To provide conclusions;
- To establish a metrological verification methodology of ATLAS-LG systems.
3. An Overview of Automatic Rolling Stock Control Systems Used to Evaluate the State of the Rolling Stock
3.1. ATLAS-LG System
3.2. WIM-WIM System (Finland)
- wheel impact force on the rail;
- dynamic rolling angle of the wheels on the rail and the relationship of this angle with the lateral interaction forces of the wheel and the rail;
- the weight of individual rolling stock units, while also determining the uneven loading of wagons.
3.3. WILD System (USA)
- vertical dynamic force which acts during the interaction of each rolling stock unit with a rail (accuracy up to 2%);
- tilt angle of the wheelset in the track gauge (roll angle of the wheel on rail) (accuracy up to 0.001 rad);
- transverse axle offset in relation to the axis of the road (accuracy up to 1 mm);
- determination of the wobbling amplitude of the bogie rolling stock torsion (accuracy up to 0.005 rad).
3.4. AGUILA System (Spain)
3.5. Lasca System (INNOtec Systems GmbH, Eppelsheim, Germany)
3.6. Usage of Wheel Culling Criteria in Systems
4. Methodology for the Modernization of ATLAS-LG System Software Operational Algorithms
4.1. Criteria for Evaluation of ATLAS-LG System Operation Results
- 1.
- Vertical forces must be evaluated according to the size of , hereinafter referred to as the derivative value of the vertical force adapted to conditions of all rolling stock speeds = 80 km/h and static axle load of freight wagons = 230 kN.
- 2.
- The derivative value of the vertical force is calculated if the speed of the rolling stock ranges from 30 to 80 km/h on a certain section with the installed ATLAS-LG system.
- 3.
- If the speed exceeds 80 km/h, the “derivative” value of the vertical force is equal to the maximum value recorded by the ATLAS-LG system during rolling of the analyzed wheel.
- 4.
- The operation range of ATLAS-LG system does cover speeds less than 30 km/h.
- 5.
- The “derivative” value of the vertical force is calculated according to the following equations:
- -
- for freight wagons (Equation (17)):
- -
- for locomotives and passenger wagon (Equation (18)):
- -
- special rolling stock (Equation (19)):where is the maximum value of the vertical force (kN), is the average value of the vertical force (kN), and is the speed at which the carriage passes a distance section (km/h).
4.2. System Software Operation Algorithm after Upgrading
- 1.
- The ATLAS-LG system continues to operate in its standard mode. On the basis of the recommendations specified in Section 4.1, the main results of the system are used for processing and evaluation.
- 2.
- The rolling stock type is determined and attributed to one of the following categories:
- -
- Freight wagon with variable load, including tanks, platforms, bunker type wagons, etc.;
- -
- locomotive;
- -
- passenger wagon;
- -
- special rolling stocks.
- 3.
- The following parameters, which are standardized for the ATLAS system, are used to continue calculations:
- -
- —maximum value of the vertical force (kN);
- -
- —average value of vertical force (kN);
- -
- —speed at which the carriage passes a distance section (km/h).
- 4.
- Depending on the categories of rolling stock according to the Equations (17)–(19) and with the instructions are given in the second and third conclusions in Section 4.1, the “derivative” value of the vertical force is determined.
- 5.
- The resulting value is aligned with the limit values given in Section 4.1 (two limits are set) for the relevant categories of rolling stock.
- 6.
- When the relevant limit value is exceeded, the required level of risk is formed and the expected actions corresponding to this level of risk are formed.
4.3. ATLAS-LG System Modernized Software Experiment and Testing
- -
- To roll out four wheelsets, in which a vertical force was determined during the test at certain part of Joniškis (city in Lithuania) section using the ATLAS-LG system. The obtained range of this vertical force was 450,500 kN. During the visual inspection of the wheel, rolling surface unevenness was detected, and, according to the existing rail exploitation requirements, the speed had to be restricted;
- -
- To form a test train from the traction unit and the semi-wagon to which the removed wheelsets were mounted;
- -
- In the Joniškis section, five test runs were performed at speeds of 40, 60, and 80 km/h. The test cycle was repeated with loaded and empty wagons.
4.4. Automatic Rolling Stock Control System with Software Installed Used in the Work
5. Description of Experiment
6. Results
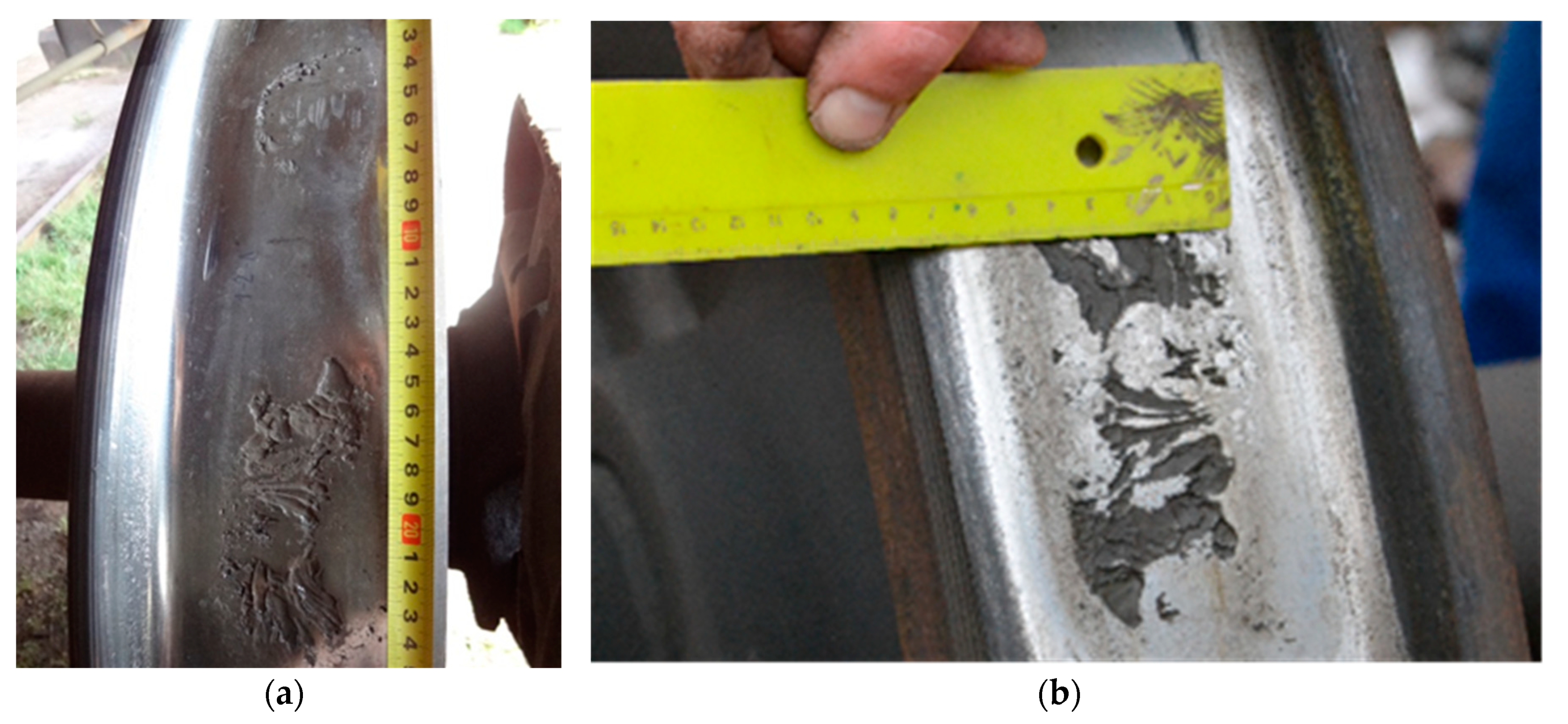
6.1. Unevenness 1: Second Left Wheel, Wheelset Number 11752782106.00
6.2. Unevenness 2: Second Right Wheel, Wheelset Number 11752782106.00
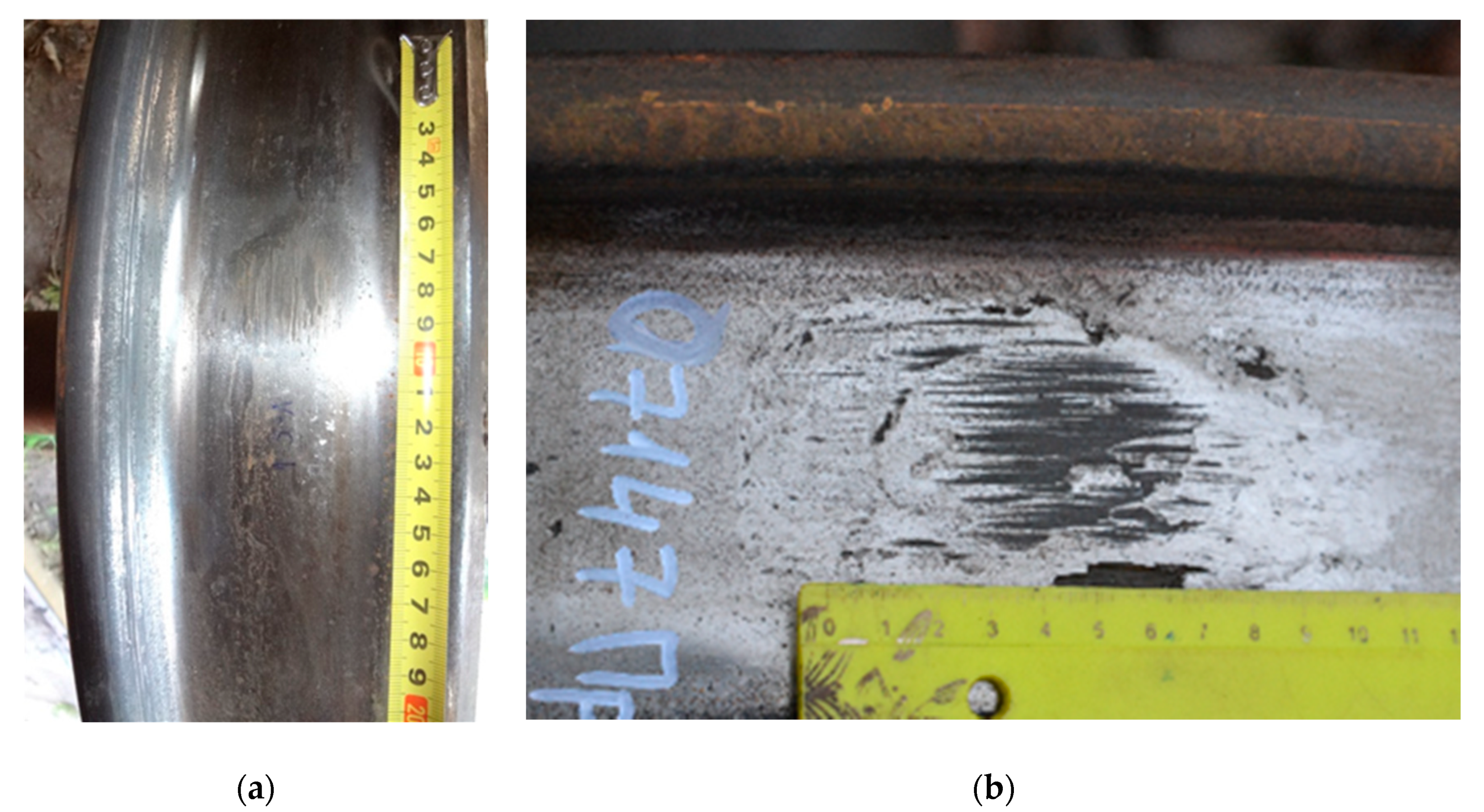
6.3. Unevenness 3: Third Left Wheel, Wheelset Number 11750714704.00
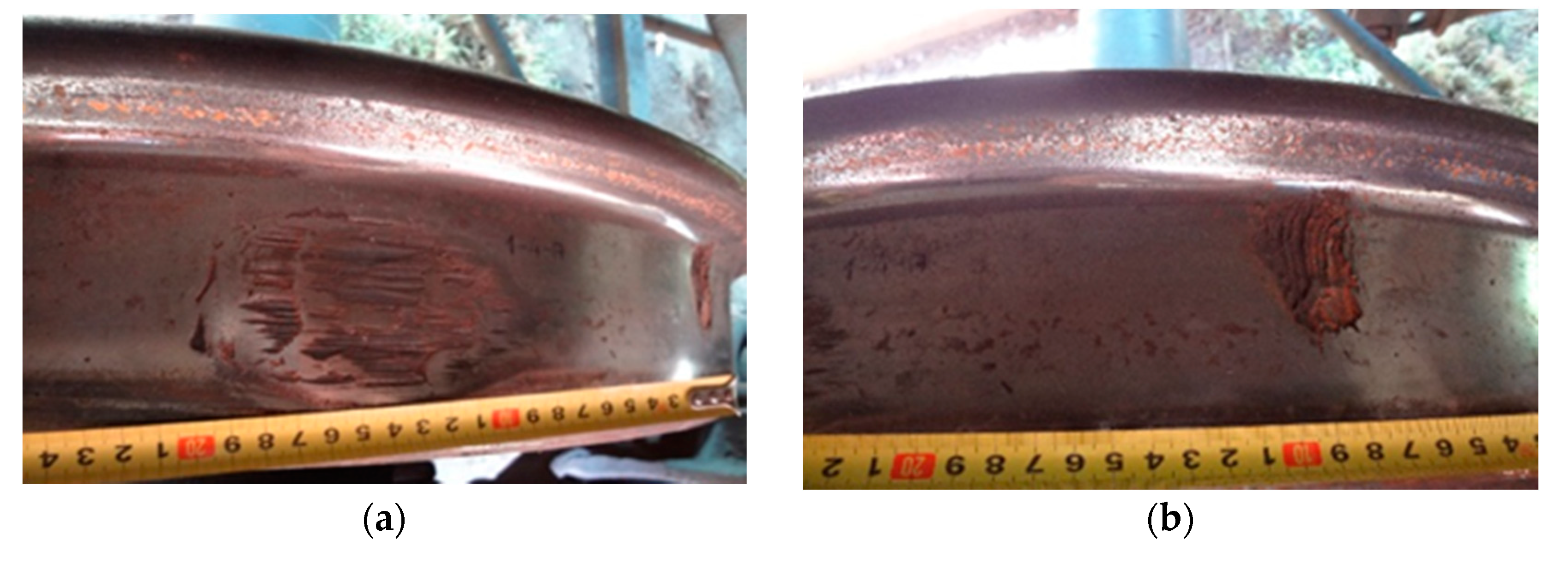
6.4. Unevenness 4: Fourth Right Wheel, Wheelset Number 000558371.90
7. Proposed Methodology for Metrological Verification of ATLAS-LG Systems
8. Discussion
9. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, S.; Xiao, X.; Wen, Z.; Jin, X. Effect of unsupported sleepers on wheel/rail normal load. Soil Dyn. Earthq. Eng. 2008, 28, 662–673. [Google Scholar] [CrossRef]
- Zakeri, J.A.; Xia, H.; Fan, J.J. Dynamic responses of train-track system to single rail irregularity. Lat. Am. J. Solids Struct. 2009, 6, 89–104. Available online: https://www.lajss.org/index.php/LAJSS/article/view/208 (accessed on 8 October 2020).
- Uzzal, R.U.A.; Stiharu, I.; Ahmed, W. Design and Analysis of MEMS based Accelerometer for Automatic Detection of Railway Wheel Flat. Int. Sch. Sci. Res. Innov. 2009, 3, 785–793. [Google Scholar] [CrossRef]
- Ward, C.P.; Goodball, R.M.; Dixon, R. Contact force estimation in the railway vehicle wheel-rail interface. In Proceedings of the 18th IFAC World Congress, Milano, Italy, 28 August 2011; pp. 4398–4403. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Y.; Olofsson, U. An adhesion model for wheel–rail contact at the micro level using measured 3d surfaces. Wear 2012, 314, 62–170. [Google Scholar] [CrossRef]
- Zhai, W.M.; Sun, X.A. A detailed model for investigating vertical interaction between railway vehicle and track. Vehicle Syst. Dyn. 1994, 23, 603–615. [Google Scholar] [CrossRef]
- Zhu, J.J.; Ahmed, A.K.W.; Rakheja, S. An Adaptive Contact Model for Simulation of Wheel-rail Impact Load due to a Wheel Flat. In Proceedings of the 13th National Conference on Mechanisms and Machines, IISc, Bangalore, India, 12–13 December 2007; pp. 157–164. Available online: https://pdfs.semanticscholar.org/5e02/4433f27891bfc354a81f6ef7cb8d81847d5a.pdf (accessed on 8 October 2020).
- Mazilu, T. A dynamic model for the impact between the wheel flat and rail. U.P.B. Sci. Bull. Ser. D 2007, 69, 131–144. Available online: https://www.scientificbulletin.upb.ro/rev_docs_arhiva/full58723.pdf (accessed on 8 October 2020).
- Hertz, H. Über die Berührung Fester Elastische Körper und über die Harte. Verh. Des. Ver. Zur Beförderung Des. Gewerbefleisses 1882, 449–463. Available online: https://home.uni-leipzig.de/pwm/web/download/Hertz1881.pdf (accessed on 8 October 2020).
- Carter, F.C. On the Action of a Locomotive Driving Wheel. Proc. R. Soc. Lond. A 1926, 112, 151–157. [Google Scholar] [CrossRef]
- Kalker, J.J. Wheel–rail rolling contact theory. Wear 1991, 144, 243–261. [Google Scholar] [CrossRef]
- Love, A.E.H. A Treatise on the Mathematical Theory of Elasticity; University Cambridge Press: Cambridge, UK, 1906; p. 580. [Google Scholar]
- Timoshenko, S.P.; Gudier, J. Elasticity Theory; Nauka: Moscow, Rusisa, 1979; p. 576. [Google Scholar]
- Bogdevičius, M. Vehicle Dynamics; Technika: Palanga, Lithuania, 2012; p. 206. (In Lithuanian) [Google Scholar]
- Bian, J.; Gu, Y.; Murray, M.H. A dynamic wheel-rail impact analysis of railway track under wheel flat by finite element analysis. Vehicle. Syst. Dyn. 2013, 51, 784–797. [Google Scholar] [CrossRef] [Green Version]
- Pogorelov, D.U.; Pavlukov, A.E.; Iudakova, T.A.; Kotov, S.V. Modeling of dynamic systems bodies contact impact problems. Dyn. Resist. Reliab. Veh. V.I. Sakalo. Briansk BGTU 2001, 531.13, 11–23. (In Russian) [Google Scholar]
- Nielsen, J.C.O.; Abrahamsson, T.J.S. Coupling of physical and modal components for analysis of moving non-linear dynamic systems on general beam structures. Int. J. Numer. Methods Eng. 1992, 33, 1843–1859. [Google Scholar] [CrossRef]
- Barke, D.W.; Chiu, W.K. A review of the effects of out-of-round wheels on track and vehicle components. Proc. Inst. Mech. Eng. Part. F J. Rail Rapid Transit. 2005, 219, 151–175. [Google Scholar] [CrossRef]
- Sackfield, A.; Dini, D.; Hills, D.A. The contact problem for a wheel having a ’flat’. Wear 2006, 261, 1265–1270. [Google Scholar] [CrossRef]
- Sackfield, A.; Dini, D.; Hills, D.A. Contact of a rotating wheel with a flat. Int. J. Solids Struct. 2007, 44, 3304–3316. [Google Scholar] [CrossRef] [Green Version]
- Shabana, A.A.; Rathod, C. Geometric coupling in the wheel/rail contact formulations: A comparative study. J. Multi–Body Dyn. 2007, 221, 147–160. [Google Scholar] [CrossRef]
- Shabana, A.A.; El–Ghandour, A.I.; Zaazaa, K.E. Study of the effect of the spiral geometry on wheel/rail contact forces. J. Multi–Body Dyn. 2011, 225, 111–125. [Google Scholar] [CrossRef]
- Kouroussis, G.; Gazetas, G.; Anastasopoulos, I.; Conti, C.; Verlinden, O. Discrete modelling of vertical track–soil coupling for vehicle–track dynamics. Soil Dyn. Earthq. Eng. 2011, 31, 1711–1723. [Google Scholar] [CrossRef]
- Pieringer, A.; Kropp, W.; Nielsen, J.C.O. The influence of contact modelling on simulated wheel/rail interaction due to wheel flats. Wear 2014, 314, 273–281. [Google Scholar] [CrossRef] [Green Version]
- Nielsen, J.C.O.; Oscarsson, J. Simulation of dynamic train–track interaction with state–dependent track properties. J. Sound Vib. 2004, 275, 515–532. [Google Scholar] [CrossRef]
- Wiest, M.; Kassa, E.; Daves, W.; Nielsen, J.C.O.; Ossberger, H. Assessment of methods for calculating contact pressure in wheel-rail/switch contact. Wear 2008, 265, 1439–1445. [Google Scholar] [CrossRef]
- Pieringer, A.; Kropp, W. A fast time-domain model for wheel/rail interaction demonstrated for the case of impact forces caused by wheel flats. J. Acoust. Soc. Am. 2008, 123, 3266. [Google Scholar] [CrossRef]
- Wasiwitono, U.; Zheng, D.; Chiu, W.K. How useful is track acceleration for monitoring impact loads generated by wheel defects? In Proceedings of the 5th Australasian Congress on Applied Mechanics, Brisbane, Australia, 10–12 December 2007; pp. 502–507. [Google Scholar]
- Kumar, V.; Rastogi, V. Investigation of vertical dynamic behaviour and modelling of a typical Indian rail road vehicle through bond graph. World J. Model. Simul. 2009, 5, 130–138. [Google Scholar]
- Ferrara, R.; Leonardi, G.; Jourdan, F. Numerical Modelling of Train Induced Vibrations. Procedia Soc. Behav. Sci. 2012, 53, 155–165. [Google Scholar] [CrossRef]
- Wang, K.; Liu, P.F.; Zhai, W.; Huang, C.; Chen, Z.; Gao, J. Wheel/rail dynamic interaction due to excitation of rail corrugation in high–speed railway. Spec. Top. High. Speed Railw. Infrastruct. 2015, 58, 226–235. [Google Scholar] [CrossRef]
- Danilov, V.N. Calculation of railway path in the zone of the joints. Work. JSC Vniizht 1952, 70, 116. (In Russian) [Google Scholar]
- Andreev, G.E. The Work of the Superstructure in Straight Sections during High-Speed Train Traffic. Ph.D. Thesis, St. Petersburg State Transport University, St. Petersburg, Russia, 1974. [Google Scholar]
- Kogan, A.Y. Vertical dynamic forces acting on a path. Work. JSC Vniizht 1969, 402, 208. (In Russian) [Google Scholar]
- Kogan, A.Y.; Verkhotin, A.A. Calculation of the impact on the path of a pair of wheels with a slider//Studies on the possibility of increasing train speeds. JSC Vniizht 1984, 5, 31–37. (In Russian) [Google Scholar]
- Kogan, A.Y. Track Dynamics and Its Interaction with Rolling Stock. Transport. 1997, 328. Available online: https://search.rsl.ru/ru/record/01001788753 (accessed on 13 January 2020). (In Russian).
- Guidelines for the Calculation of the Vertical Unsteady Stress-Strain State of the Track on Wooden and Reinforced Concrete Sleepers in the Area of the Rail Junction; Ministry of Transport of the Russian Federation: Moscow, Russia, 2005. (In Russian)
- Assessment of Rolling Stock Geometry and Risk of Rolling Surface Defects; JSC Railway Products Conformity Assessment Centre: Vilnius, Lithuania, 2015. (In Lithuanian)
- Mosleh, A.; Costa, P.A.; Calçada, R. A new strategy to estimate static loads for the dynamic weighing in motion of railway vehicles. Proc. Inst. Mech. Eng. Part. F J. Rail Rapid Transit. 2020, 234, 183–200. [Google Scholar] [CrossRef]
- Xu, J.; Wang, P.; Wang, L.; Chen, R. Effects of profile wear on wheel–rail contact conditions and dynamic interaction of vehicle and turnout. Adv. Mech. Eng. 2016, 8, 1687814015623696. [Google Scholar] [CrossRef] [Green Version]
- Chen, R.; Chen, J.; Wang, P.; Xu, J.; Xiao, J. Numerical investigation on wheel-turnout rail dynamic interaction excited by wheel diameter difference in high-speed railway. J. Zhejiang Univ. Sci. A 2017, 18, 660–676. [Google Scholar] [CrossRef]
- Dindar, S.; Kaewunruen, S.; An, M.; Sussman, J.M. Bayesian Network-based probability analysis of train derailments caused by various extreme weather patterns on railway turnouts. Saf. Sci. 2018, 110, 20–30. [Google Scholar] [CrossRef] [Green Version]
- Tunna, J.; Sinclair, J.; Pérez, J. A Review of wheel wear and rolling contact fatigue. Proceedings of the Institution of Mechanical Engineers. Proc. Inst. Mech. Eng. Part. F J. Rail Rapid Transit. 2007, 221, 271–289. [Google Scholar] [CrossRef]
- Enblom, R. Deterioration mechanisms in the wheel–rail interface with focus on wear prediction: A literature review. Vehicle. Syst. Dyn. 2009, 47, 661–700. [Google Scholar] [CrossRef]
- Zhai, W.; Gao, J.; Liu, P.; Wang, K. Reducing rail side wear on heavy-haul railway curves based on wheel–rail dynamic interaction. Vehicle. Syst. Dyn. 2014, 52, 440–454. [Google Scholar] [CrossRef]
- Liu, X.; Markine, V.L. Train Hunting Related Fast Degradation of a Railway Crossing—Condition Monitoring and Numerical Verification. Sensors 2020, 20, 2278. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aniołek, K.; Herian, J. Numerical Modeling of Load and Stress on the Contact Surface of a Turnout and a Railway Vehicle. J. Transp. Eng. 2013, 139, 533–539. [Google Scholar] [CrossRef]
- Kataoka, H.; Abe, N.; Wakatsuki, O. Evaluation of service life of jointed rails. QR RTRI 2002, 43, 101–106. [Google Scholar] [CrossRef]
- Xin, L. Long-Term Behaviour of Railway Crossings: Wheel–Rail Interaction and Rail Fatigue Life Prediction. Ph.D. Thesis, TU Delft, Delft, The Netherlands, 2017. [Google Scholar]
- Kampczyk, A. Measurement of the Geometric Center of a Turnout for the Safety of Railway Infrastructure Using MMS and Total Station. Sensors 2020, 20, 4467. [Google Scholar] [CrossRef]
- Monk-Steel, A.; Thompson, D.; Beer, F.; Janssens, M. An investigation into the influence of longitudinal creepage on railway squeal noise due to lateral creepage. J. Sound Vib. 2006, 293, 766–776. [Google Scholar] [CrossRef]
- Kardas-Cinal, E. Comparative study of running safety and ride comfort of railway vehicle. Pr. Nauk. Politech. Warsz. 2009, 71, 75–84. [Google Scholar]
- Kardas-Cinal, E. Selected problems in railway vehicle dynamics related to running safety. Arch. Transp. 2015, 31, 37–45. [Google Scholar] [CrossRef]
- Hecht, M.; Wunderli, J.; Thron, T.; Sehu, D. sonRAIL—The new Swiss calculation model for railway noise. Notes Numer. Fluid Mech. Multidiscip. Des. 2012, 118, 515–522. [Google Scholar] [CrossRef]
- Fletcher, D.I.; Beynon, J.H. The effect of intermittent lubrication on the fatigue life of pearlitic rail steel in rolling-sliding contact. Proc. Inst. Mech. Eng. Part. F J. Rail Rapid Transit. 2000, 214, 145. [Google Scholar] [CrossRef]
- Descartes, S.; Saulot, A.; Godeau, C.; Bondeux, S.; Dayot, C.; Berthier, Y. Wheel flange/rail gauge corner contact lubrication: Tribological investigations. Wear 2011, 271, 54–61. [Google Scholar] [CrossRef]
- Shi, D.; Yunguang, Y.; Gillwald, M.; Hecht, M. Robustness enhancement of machine fault diagnostic models for railway applications through data augmentation. Proj. Innov. Monit. Predict. Maint. Solut. Lightweight Wagon (Innowag) 2020. [Google Scholar] [CrossRef]
- Deshimaru, T.; Kataoka, H.; Abe, N. Estimation of Service Life of Aged Continuous Welded Rail. Q. Rep. Rtri 2006, 47, 211–215. [Google Scholar] [CrossRef]
- Freimanis, A.; Kaewunruen, S. Peridynamic analysis of rail squats. Appl. Sci. 2018, 8, 2299. [Google Scholar] [CrossRef] [Green Version]
- Dybeł, K.; Kampczyk, A. Symbols and codes used in the cartographic documentation of railway areas. Probl. Kolejnictwa 2019, 182, 115–129. [Google Scholar]
- Zarembski, A.M. Wheel/rail impact: P1 and P2 forces. Railw. Track Struct. 1995, 1, 9–10. [Google Scholar]
- Technical Description of ATLAS-LG System, RAKP Project. ATLAS-LG Requirements for Installation; VAE Eisenb. GMBH: Eisenberg, Germany, 2006; Volume 8, p. 0124490769.
- Guidelines to Best Practices for Heavy Haul Railway Operations: Wheel and Rail Interface Issues. Available online: https://ihha.net/resources-ihha/ecopy (accessed on 13 January 2020).
- WILD Wheel Impact Load Detector; Salient Systems, Inc.: Austin, TX, USA, 2020.
- Scalex Wild Wheel Impact Load Detector and Control. Scale; Tampton: Tampere, Finland, 2020.
- Vertical Dynamic Load Monitoring System “AGUILA”, Based on Fiber Optic Pressure Sensors; ITSS: Puerto de Sagunto, Spain, 2014. (In Russian)
- Mobile Monitoring System for Train., Vehicle and Infrastructure under Real Operating Conditions; Innotec System GMBH, Lasca: Hannover, Germany, 2020.
- Kogan, A.Y.; Romen, U.S.; Bogdanov, V.M.; Levinzon, M.A.; Verchotin, A.A. The investigation of effect of impact from wheel on rail because of availability perturbation no rolling surface of wheel. In Proceedings of the World congress on Railway research, Florence, Italia, 16–19 November 1997; p. 401. [Google Scholar]
- System for monitoring rail loads and technical condition of wagons. Railw. World 2000, 1, 12. (In Russian)






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Defects in Rail Sample | Vertical Loads, kN | ||
|---|---|---|---|
| Temperature of Rail 20 °C | Temperature of Rail −20 °C | Temperature of Rail −60 °C | |
| Without defects | 2000 | 1000 | - |
| With defects | - | 330 | 240 |
| Country and Additional Information | Driving Speed, km/h | Acceleration in Journal Box, g (Multiply by g = 9.81 m/s2) | Maximum Vertical Force, kN | The Ratio of the Maximum Force to the Background | |
|---|---|---|---|---|---|
| For Repairs | Uncouple | ||||
| In Russia, for wagons | 60 | 25–30 | 370 | 450 | - |
| In Russia, for passenger wagons | 20 km length on the track | Winter: 45 Summer: 30 | - | - | 3 |
| In Russia (letter of V.A. Gapanovich 13 May 2013) | - | - | 370 | 450 | - |
| USA (WIM-WIM) | 45 | - | 270 | 450 | - |
| USA (TTCI, Transportation Technology Center Inc.) | 72 | - | 273 | 350 | - |
| India | 55–65 | - | 200 | 350 | 2.0–4.5 |
| Lithuania, ATLAS-LG system | - | - | - | - | 3–5 locomotives and electrical trains 6.5–11 wagons |
| Poland, System ATLAS | - | - | 300 | 350 | 4.5–5.0 |
| Sweden, System ATLAS | - | - | 300 locomotive 190 wagon | 425 locomotive 320 wagon | 4.7 locomotive 5.2 wagon |
| UK, system ATLAS | - | - | 350 | 400 | - |
| Germany, system ATLAS | - | - | - | 0 | 1.7 (three times) |
| No. of Wheelset | Number of Wheelset (from Manufacturer) | Definition of Wheel Surface Defects | |||
|---|---|---|---|---|---|
| Left Wheel | Right Wheel | ||||
| Flat Spot Size, mm (Inspected in Known Experiment [38]) | Flat Spot Size, mm (Inspected in Current Experiment) | Flat Spot Size, mm (Inspected in Known Experiment [38]) | Flat Spot Size, mm (Inspected in Current Experiment) | ||
| 1 | 002964405.89 | - | Wheel flat spot after impact 10 × 20 × 2.0 | - | Wheel flat spot after slip and slide 50 × 45 × 3.0 7 × 25 × 2.0 |
| 2 | 11752782106.00 | Wheel flat spots after slip and slide 3.0 × 120 × 60 1.0 × 70 × 50 Wheel flat spot after impact 110 × 45 × 4.0 | Wheel flat spots after slip and slide 3.0 × 170 × 60 1.0 × 70 × 50 1.5 × 80 × 50 | Wheel flat spot after slip and slide 2 × 190 × 50 Wheel flat spots after impact 40 × 60 × 4.0 130 × 30 × 4.0 | Wheel flat spots after slip and slide 2 × 190 × 60 1.5 × 170 × 60 |
| 3 | 11750714704.00 | Wheel flat spot after slip and slide 1.5 × 70 × 55 | Wheel flat spots after slip and slide 2.0 × 100 × 70 0.7 × 30 × 30 | - | No damage |
| 4 | 000558371.90 | - | No damage | Wheel flat spot after slip and slide 2.0 × 80 × 50 Wheel flat spot after impact 30 × 45 × 3.0 | Wheel flat spot after slip and slide 2.0 × 80 × 50 Wheel flat spot after impact 30 × 50 × 3.0 |
| Trip | Speed, km/h | Direction | Left Wheel | Right Wheel | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Wheelset No. 5 from Atlas-LG System | Wheelset No. 6 from ATLAS-LG System | Wheelset No. 7 from ATLAS-LG System | Wheelset no. 8 from Atlas-LG System | Wheelset No. 5 from ATLAS-LG System | Wheelset No. 6 from ATLAS-LG System | Wheelset No. 7 from ATLAS-LG System | Wheelset No. 8 from ATLAS-LG System | ||||||||||||
| Maximum Achieved Value, kN (Danger Limit 450/350) | KdM (Danger Level), Dimensionless | Maximum Actual Value, kN | Maximum Achieved Value, kN (Danger Limit 450/350) | KdM (Danger Level), Dimensionless | Maximum Actual Value, kN | Maximum Achieved Value, kN (Danger Limit 450/350) | Maximum Achieved Value, kN (Danger Limit 450/350) | Maximum Achieved Value, kN (Danger Limit 450/350) | KdM (Danger Level), Dimensionless | Maximum Actual Value, kN | Maximum Achieved Value, kN (Danger Limit 450/350) | Maximum Achieved Value, kN (Danger Limit 450/350) | KdM (Danger Level), Dimensionless | Maximum Actual Value, kN | Maximum Achieved Value, kN (Danger Limit 450/350) | ||||
| 112718 | 55.0 | Forward | 311.14 | 6.68 | 393.8 | 469.60 * | 7.33 (1) | 418.22 | 455.75 * | 222.54 | 273.47 | 6.30 | 385.33 | 497.88 * | 267.07 | 6.41 | 362.55 | 447.81 ** | |
| 114022 | 47.5 | Forward | 345.43 | 6.33 | 391.1 | 481.70 * | 5.52 | 303.58 | 469.09 * | 264.07 | 314.56 | 6.24 | 368.17 | 420.62 ** | 259.23 | 5.15 | 305.48 | 412.09 ** | |
| 115111 | 41.0 | Forward | 352.75 ** | 5.94 | 355.5 | 474.86 * | 5.06 | 304.88 | 501.01 * | 280.67 | 313.03 | 6.35 | 388.72 | 428.79 ** | 296.54 | 4.92 | 290.40 | 418.43 ** | |
| 120421 | 57.0 | Forward | 305.61 | 7.24 (0) | 427.7 | 493.98 * | 6.53 | 365.84 | 423.52 * | 222.01 | 271.61 | 5.69 | 367.30 | 446.23 ** | 261.89 | 5.13 | 288.04 | 375.13 ** | |
| 121818 | 60.6 | Forward | 292.88 | 7.77 (1) | 468.2 | 516.11 * | 5.96 | 322.96 | 393.23 ** | 210.23 | 263.38 | 5.42 | 338.06 | 401.29 ** | 206.20 | 3.53 | 249.09 | 300.72 | |
| 123030 | 57.5 | Forward | 279.78 | 7.86 (1) | 451.4 | 520.08 * | 6.47 | 366.23 | 418.51 ** | 217.32 | 262.11 | 5.76 | 352.28 | 444.02 ** | 236.06 | 4.88 | 307.89 | 374.67 ** | |
| 124558 | 59.3 | Forward | 295.87 | 8.30 (1) | 488.5 | 543.41 * | 6.03 | 335.48 | 398.67 ** | 205.89 | 242.90 | 5.51 | 335.04 | 412.68 ** | 234.65 | 4.99 | 324.00 | 378.27 ** | |
| 130156 | 51.2 | Forward | 279.12 | 8.11 (1) | 489.7 | 564.57 * | 7.00 (0) | 377.07 | 440.00 ** | 251.07 | 270.27 | 5.84 | 351.91 | 480.84 * | 247.01 | 5.01 | 301.36 | 395.42 ** | |
| 131729 | 72.3 | Forward | 304.45 | 9.89 (1) | 511.3 | 551.78 * | 8.89 (1) | 512.79 | 360.23 ** | 187.75 | 230.27 | 5.57 | 333.02 | 512.79 * | 181.47 | 5.53 | 304.86 | 304.46 | |
| 133335 | 76.7 | Forward | 236.25 | 8.14 (1) | 421.6 | 452.78 * | 5.55 | 358.40 | 295.23 | 192.48 | 224.81 | 4.81 | 257.48 | 395.26 ** | 183.17 | 5.42 | 365.40 | 353.21 ** | |
| 134904 | 75.7 | Forward | 254.14 | 9.05 (1) | 483.3 | 508.81 * | 6.65 | 397.07 | 323.30 | 184.26 | 214.47 | 5.09 | 300.96 | 407.31 ** | 184.52 | 4.88 | 321.61 | 323.50 | |
| 140516 | 77.7 | Forward | 263.07 | 7.92 (1) | 465.6 | 466.80 * | 6.81 | 358.69 | 373.27 ** | 175.94 | 190.99 | 5.94 | 381.53 | 387.98 ** | 170.16 | 5.41 | 323.38 | 335.31 | |
| Wheel number in the act | wheelset No. 1 (left side) | wheelset No. 2 (left side) | wheelset No. 3 (left side) | wheelset No. 4 (left side) | wheelset No. 1 (right side) | wheelset No. 2 (right side) | wheelset No. 3 (right side) | wheelset No. 4 (right side) | |||||||||||
| Axle number (from manufacturer) | 0029654405.89 | 117552782106.00 (registered dangers) | 11750714704.00 | 000558371.90 | 0029654405.89 | 117552782106.00 (registered dangers) | 11750714704.00 | 000558371.90 | |||||||||||
| Unevenness of the wheels | flat spot (after impact) | flat spots (after slip and slide) | flat spot (after slip and slide) 0.7 × 30 × 30 mm | - | flat spot (after impact) 50 × 45 × 3 mm | flat spot (after slip and slide) 2 × 190 × 60 mm * | - | flat spot (after slip and slide) 2 × 80 × 50 mm * | |||||||||||
| 10 × 20 × 2 mm | 1 × 70 × 50 mm | ||||||||||||||||||
| - | 3 × 170 × 60 mm * | flat spot (after slip and slide) 2 × 100 × 70 mm * | - | flat spot (after impact) 7 × 25 × 2 mm | 1.5 × 170 × 60 mm | - | flat spot (after impact) 30 × 50 × 3 mm | ||||||||||||
| - | flat spot (after slip and slide) 1.5 × 80 × 50 mm | - | - | - | |||||||||||||||
| Detection probability, % | danger 1 | - | 100 | 33 | 25 | ||||||||||||||
| danger 0 | - | 50 | 75 | 67 | |||||||||||||||
| In Total | - | 100 * | 83 * | 100 * | 67 * | ||||||||||||||
| Detection according to ATLAS KdM,% based on previous test results | Tests | danger 1 | - | 42 | 8 | 8 | 0.7 | ||||||||||||
| danger 0 | - | 17 | 6 | 6 | 2 | ||||||||||||||
| In total | - | 59 * | 14 * | 14 * | 2.7 * | ||||||||||||||
| Trips | - | 13 | 7 | 7 | 0 | ||||||||||||||
| No. of Wheelset | Length, mm | Depth, mm | Expected Danger Level |
|---|---|---|---|
| 1 | 62 | 1.0 | 0 |
| 2 | 75 | 1.5 | 0 |
| 3 | 87 | 2.0 | 1/0 |
| 4 | 106 | 3.0 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kukėnas, V.; Kharitonov, B.; Levinzon, M.; Jasevičius, R. Improvement of Diagnostic Parameters of a Rolling Wheel with Flat Spot and Experimental Test on Lithuanian Railways. Appl. Sci. 2020, 10, 7148. https://doi.org/10.3390/app10207148
Kukėnas V, Kharitonov B, Levinzon M, Jasevičius R. Improvement of Diagnostic Parameters of a Rolling Wheel with Flat Spot and Experimental Test on Lithuanian Railways. Applied Sciences. 2020; 10(20):7148. https://doi.org/10.3390/app10207148
Chicago/Turabian StyleKukėnas, Vladas, Boris Kharitonov, Mikhail Levinzon, and Raimondas Jasevičius. 2020. "Improvement of Diagnostic Parameters of a Rolling Wheel with Flat Spot and Experimental Test on Lithuanian Railways" Applied Sciences 10, no. 20: 7148. https://doi.org/10.3390/app10207148