Featured Application
Authors are encouraged to provide a concise description of the specific application or a potential application of the work. This section is not mandatory.
Abstract
A concrete track, such as Rheda 2000 is commonly used in high-speed railways in Korea, Germany, China, etc., to enhance the operational safety of trains and to reduce the maintenance costs. However, when settlement of embankment or a crack in the concrete slab track occurs, the durability of the concrete track deteriorates significantly. Transition zones are considered to be vulnerable and are often deformed in railway embankments. The characteristics of track support stiffness and stresses on the rail in a deformed section are different from those in an undeformed section. In this study, a field measurement and numerical analysis were carried out to identify the dynamic response on transition zones where the track is deformed. A numerical analysis model was built to simulate the deformed concrete slab track, and it was compared with measured data from field tests for verification. The field tests to measure the stresses on the rail were performed in a train speed range from 280 to 300 km/h. According to the numerical analysis, the dynamic characteristics of the track varied with train speeds, which were then compared with the allowable stresses of the concrete slab track.
1. Introduction
Concrete tracks, which increase the running stability of high-speed trains, compared with ballast tracks, are widely used in Korea, Germany, China, etc., with the development of high-speed railways. On the other hand, when settlement or cracking occurs in the concrete slab track, the durability of the concrete track deteriorates significantly, and the methods of repair of damaged track are very limited and difficult.
A zone where a bridge and embankment or a tunnel and embankment join is called a transition zone. Track support stiffness varies a lot in a short distance in the transition zone. Railway embankment settlement occurs more frequently in the transition zone. An impact load from the dynamic behavior of train operation is mostly generated from differential settlement on the trackbed. As the speed of the train increases, such as is the case on a high-speed line, wheel loads on track also increase, due to the impact load in the section where differential settlement occurs in a short distance [1,2].
Dimitrovová and Varandas presented analytical transient solutions of one-dimensional finite systems with an abrupt change in foundation stiffness using two methodologies, i.e., a superposition of global modes of vibration and linking together analytical solutions of two separate parts of the structure [3]. The results were used for the determination of critical velocities, and the analysis was conducted with a constant moving force. However, Baek revealed that a vehicle load including suspension systems has a higher accuracy in terms of simulating the impact load than other loading methods, such as a single axial load and a wheel moving load [2]. Ang and Dai investigated a jumping wheel (loss of contact) phenomenon at a transition point using a moving element method [4]. The results showed that the abrupt change in foundation stiffness may trigger jumping wheels in the presence of track irregularities. Kim analyzed principal stresses of the trackbed on a settled transition zone using a 3D finite element method (FEM), and the results showed that plastic behaviors of the trackbed are caused by shear deformation when the track irregularities and train speeds increase [1]. Hu et al., revealed that when a high-speed train passes bridge–embankment transitions, acceleration and displacement reach a peak at the point 25 m on the trackbed from the abutment [5]. At this point, the applied stresses from the wheel load are different from settled and unsettled sections. A numerical analysis approach to analyzing the abovementioned condition requires a realistic simulation for the train and trackbed; thus, both the modeling and long analytical periods are difficult to achieve. Y. Gao stated that a track model incorporating all elements of the track, such as fastener, railpad, and sleeper, should be modeled to estimate realistic analysis results [6].
Lei and Zhang developed a vehicle–track–subgrade coupling system by utilizing the finite-element method for the transition section model, and the results showed that the transition pattern of the track stiffness has a primary influence on the dynamic behavior of the vehicle and the track, and smoothing of the track stiffness distribution can significantly reduce wheel–rail interaction forces and rail vertical accelerations [7]. Dahlberg conducted a numerical analysis of the transition zone with hanging sleeper, and analyzed wheel–rail contact force for the abrupt change in track stiffness [8]. The analysis consists of a 3D FEM track model and a moving wheelset that simulates the load from one axle of a train. The detrimental effects of hanging sleepers can be reduced by under-sleeper pads. Varandas et al., published a numerical model for dynamic loads on the ballast by trains passing the transition, which was then validated against field measurements [9]. The aforementioned numerical analysis was all for ballasted track, and considered the lower trackbed as a simple spring or elastic material properties. The track deformation in transition zones may lead to high impact stresses on rail during train passage, but low (or even zero) stresses are applied on some hanged sleepers and other adjacent sleepers with ballasted track [8]. However, a different dynamic response from ballasted track occurs with concrete track.
Shahraki et al., revealed a 3D finite element model to study the dynamic behavior of different types of transition zones between ballasted and ballastless track under the passage of high-speed trains [10]. On the basis of this model, auxiliary rail installation shows a high rate of track dynamic improvement. There is a sensitive zone located within the first 5 m of the slab track from the track interface. Shan et al., compared two different transition sections through a numerical analysis using the 3D finite element method [11]. The results showed that the dynamic response of a two-part transition section is better than that of an inverted trapezoid transition section. Though this paper simulated a track–subgrade system with slab track, a vehicle–track system is not modeled.
Previous studies to figure out wheel–rail interaction using concentrated loads or wheel moving loads of the single axle reveal limitations and inaccurate results in the numerical analysis. Even though concrete track has often been used for newly developed high-speed railways recently and demonstrates more complicate behaviors under high-speed trains than ballast track, a simplified approach based on spring and beam theory is still used for the track system analysis [12,13,14]. Shan revealed that the influence of dynamic response is different according to subgrade materials [15].
This study shows the analysis results from a numerical modeling of the Korea High-Speed Train called KTX, the concrete slab track including all components of track, and the trackbed in three dimensions at the bridge–embankment transition zone under deformed conditions. These analysis results were compared with field measurement data under a train speed range from 280 to 300 km/h. The field tests were performed on a deformed concrete slab track due to trackbed settlements. The numerical model was verified by comparing it with the measured field data. Dynamic characteristics from the impact load, such as wheel loads in the rail and stresses in the concrete slab track, etc., under different train speeds are shown in the results of this study.
2. Theoretical Background
Impact Load Due to Discordance between Wheel and Rail
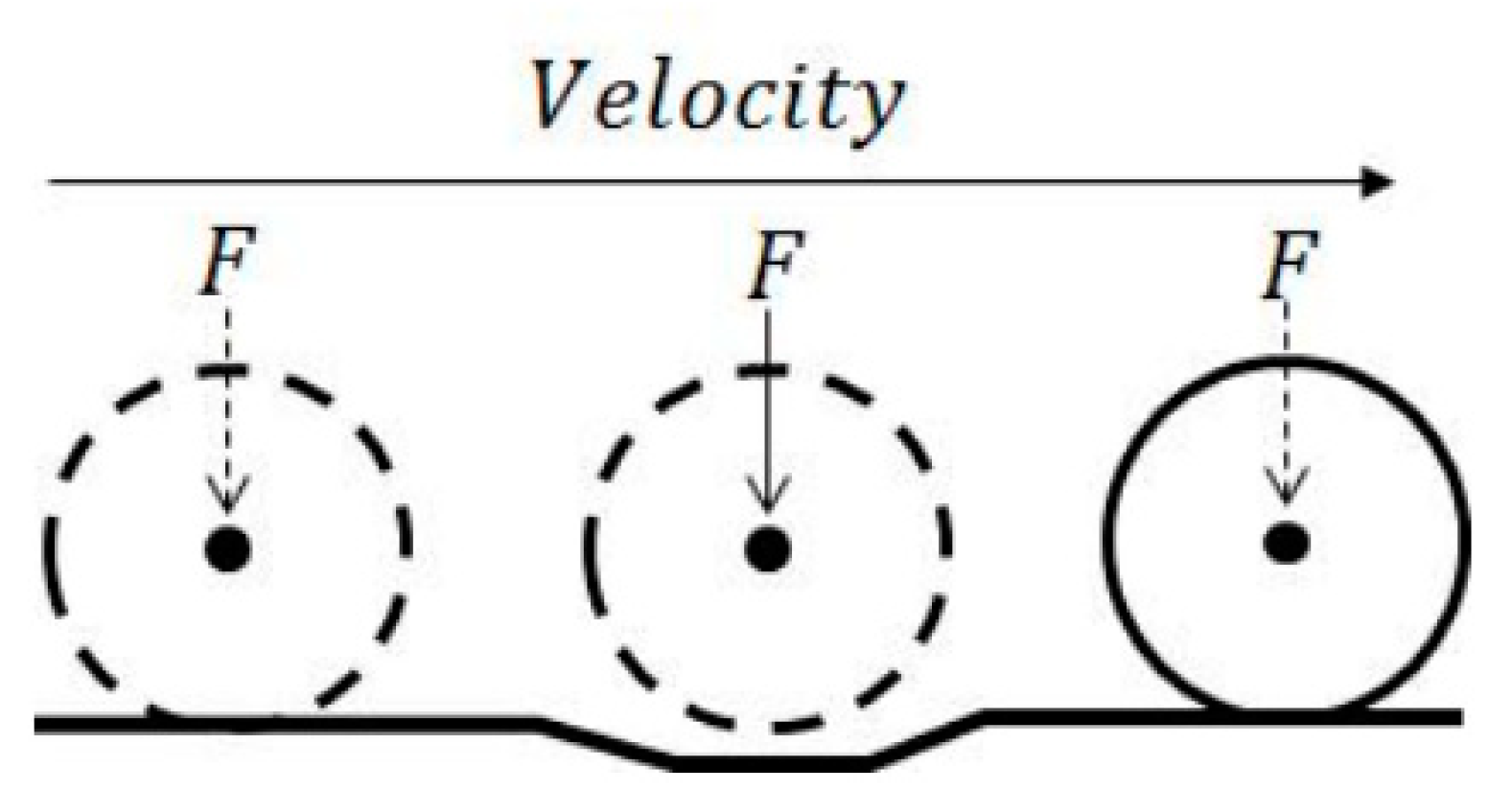
The impact load applied to the track from a running train is assumed to be caused by the vehicle becoming unstuck from rail momentarily. In fact, a wheel seldom comes unstuck from the rail while the train is running; this is more likely to occur when sleepers are floating, railpads are not aligned, or track irregularities occur. The wheel is not separated from the rail in the transition zone of this paper. However, a variable of wheel floating is considered to express a general principle of the impact load. Figure 1 shows the wheel separated from the rail.
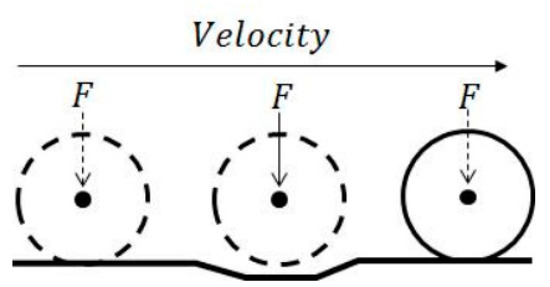
Figure 1.
Wheel floating above the rail.
When the wheel runs on the rail normally, a deflection occurs due to an upward spring mass, and can be expressed as Equation (1):
where : Axle spring deflection; : Spring-to-spring mass; : 1/2 of car body mass; : Spring coefficient of primary axle; : Acceleration of gravity.
When a wheel that is separated from the rail drops on the track, a downward force is generated by wheel gravity, and an axle spring restoration force occurs, which can be expressed by Equation (2):
where : Force to wheel (primary axle); : Unsprung mass including wheel (primary axle).
Equation (3) can be obtained by applying Equation (1) to Equation (2).
In Equation (3), the wheel is in the state to receive a converted acceleration of gravity, as described by Equation (4):
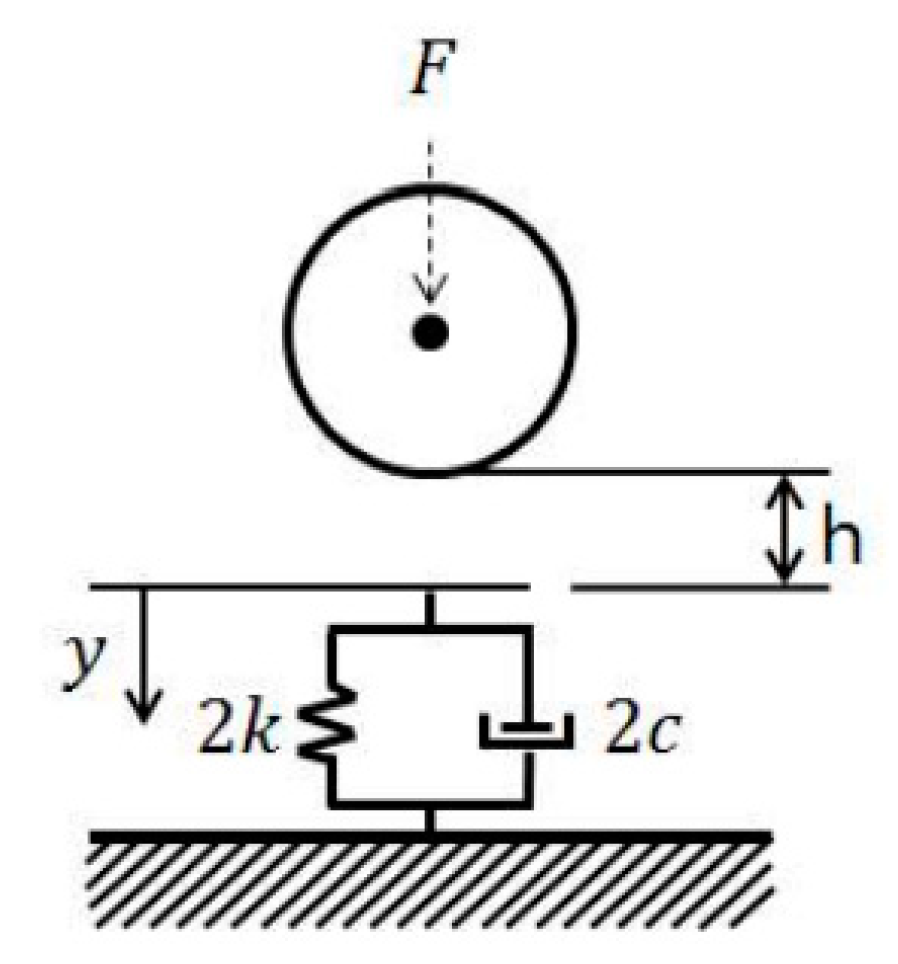
where μ refers to the converted acceleration of gravity. The dynamic model representing the floating wheel over the rail is as expressed by Figure 2, and the equation of motion in this dynamic model is represented by Equation (5).
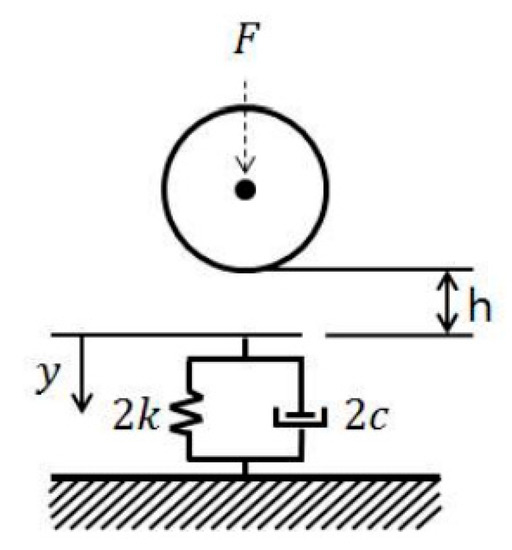
Figure 2.
Dynamic model representing the impact on the track by the floating wheel.
3. Field Measurement
3.1. Site Summary
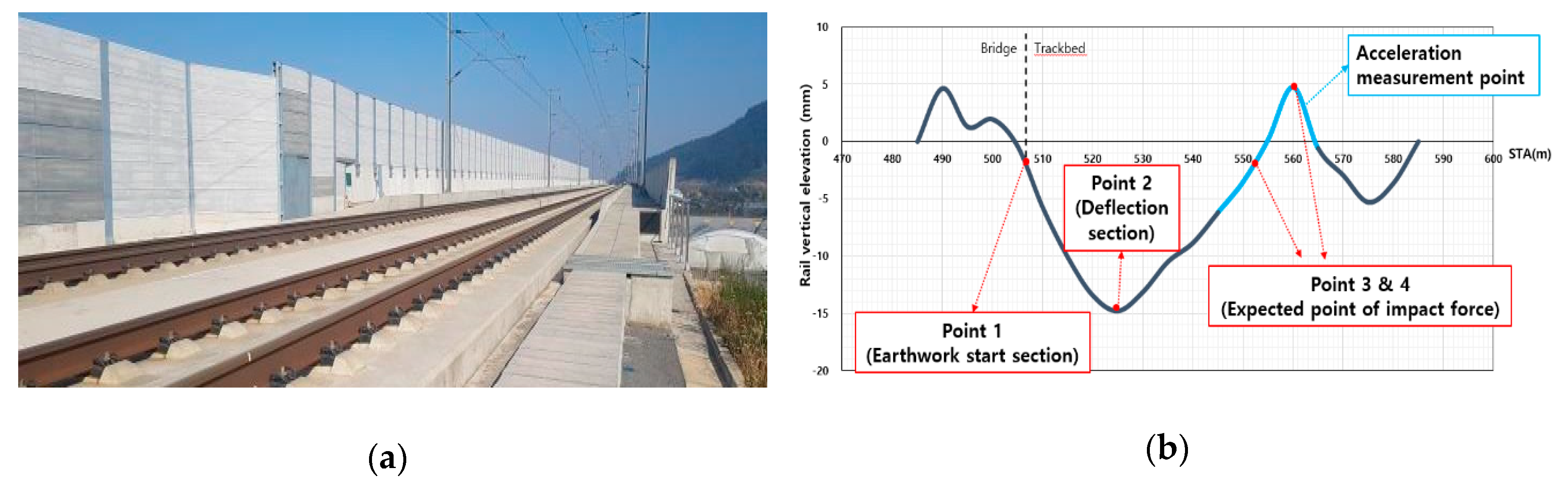
Wheel loads were measured at the section where the impact load may be applied from the train on the deformed track. Figure 3 shows the view of the site and the vertical irregularities of the tested track.
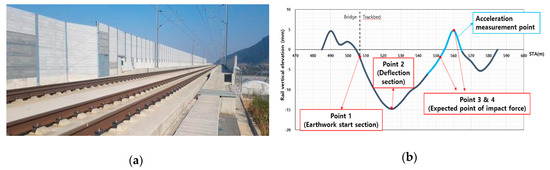
Figure 3.
Measurement section. (a) Overview; (b) Profile of measurement section.
Point 1 is at a boundary location between the bridge and earthwork. After the high-speed train passes Point 1, the train body may maintain the current position due to an inertia force despite the track settlement. However, wheels may keep their contact with an expansion of bogie springs and decreased wheel–rail contact forces. Point 2 was set at the point of most settlement to measure decreased wheel–rail contact forces.
Baek revealed, through a numerical analysis, that the impact force of the train occurs at 40 to 60 m from the boundary between the bridge and earthwork [2]. Thus, accelerometers were installed between 40 and 60 m to determine the points where the impact load is expected to occur. The points where the largest trackbed acceleration occurred were designated as Point 3 and 4, respectively.
3.2. Designation of the Predicted Impact Point
The location of the impact load is influenced by various variables such as track conditions, train speeds, and wheel–suspension interactions. Thus, the predicted impact point was determined by measuring vertical acceleration before attaching strain gauges in the section.
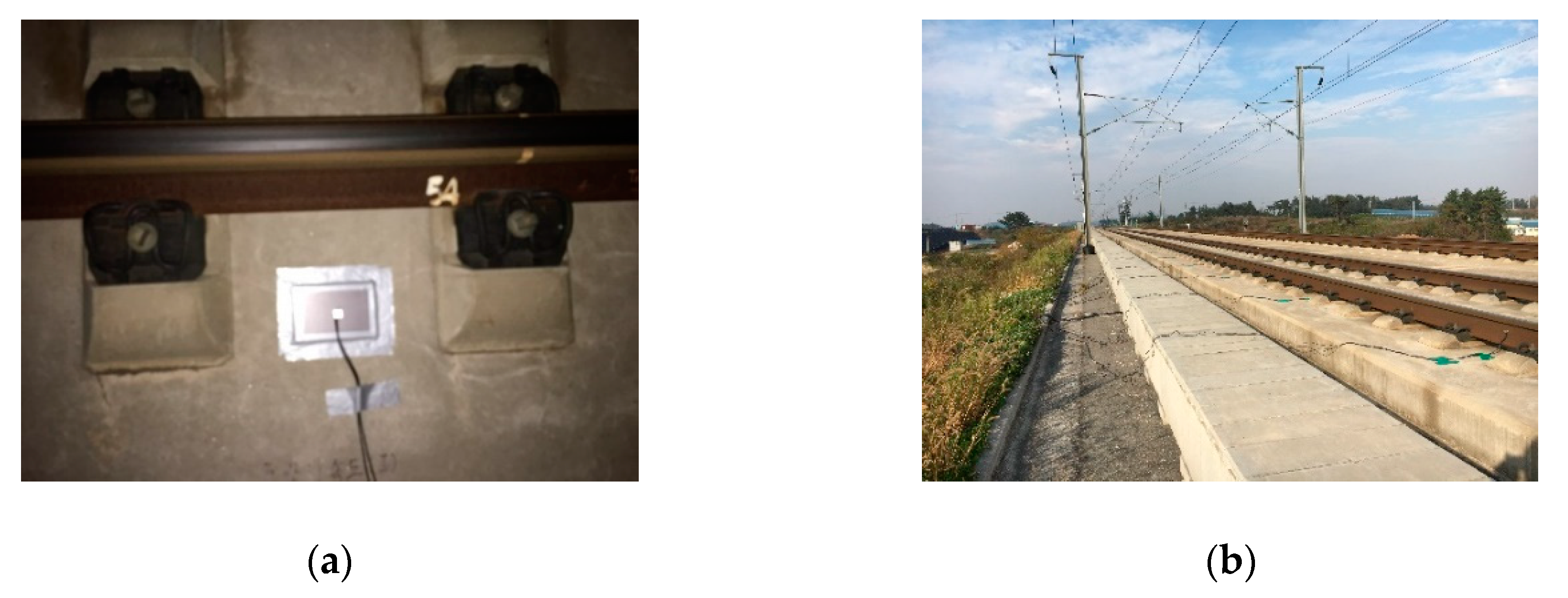
Seven accelerometers were installed at 3 m intervals between sleepers on the concrete slab. The installation section of the accelerometers is shown in the blue line in Figure 3.
In addition, accelerometers were attached on iron plates, which were firmly fixed to the concrete slabs due to a surface roughness of the concrete. Figure 4 shows the installation status of accelerometers.
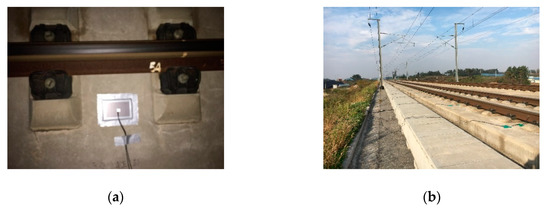
Figure 4.
Overview of accelerometers installation. (a) Accelerometer; (b) Overview of measurement site.
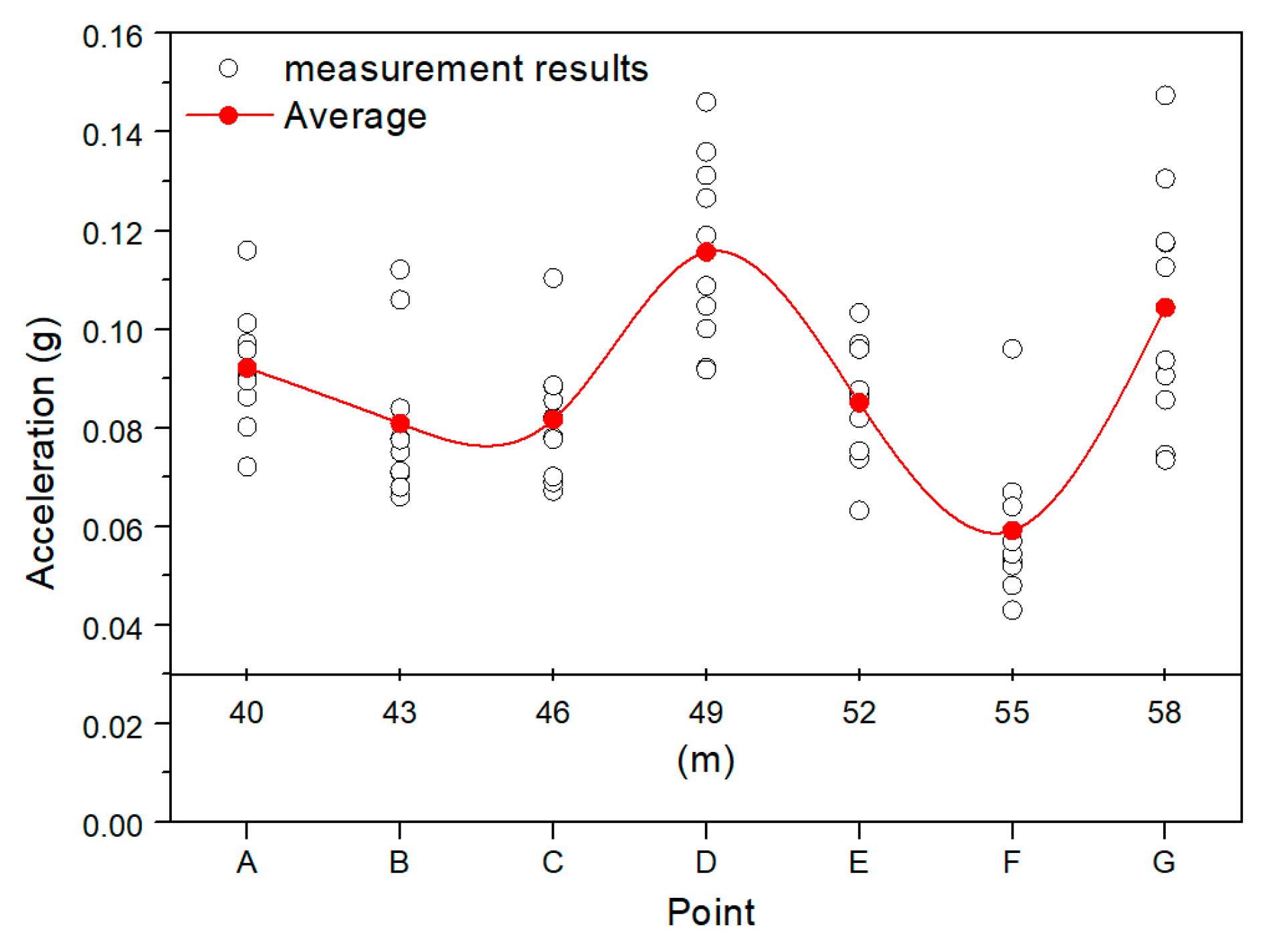
Results of the acceleration measurement of passing trains are shown in Figure 5, and the x-axis in the Figure 5 indicates distances from the bridge–earthwork boundary.
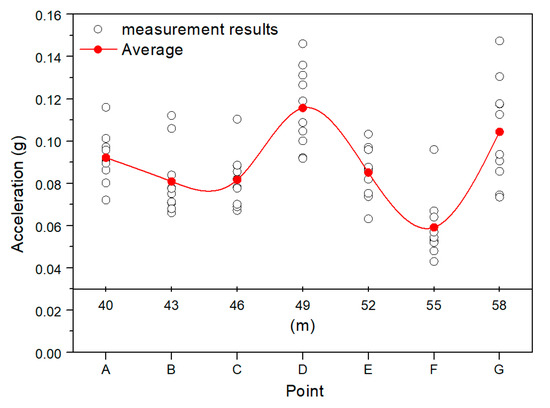
Figure 5.
Results of acceleration measurement.
As results of the accelerations of seven points (A–G), the acceleration values at Point D and G were generally larger than the other points. Eighty percent of the maximum was distributed at Point D and 20% at point G. A maximum acceleration value of Point D and G is 0.146 g, and an average value is 0.11 g, which is about 1.4 times larger than the other points from track irregularities. Thus, points D and G, which measured the highest values of acceleration, were selected as locations for the impact load.
3.3. Wheel Load Measuring Process
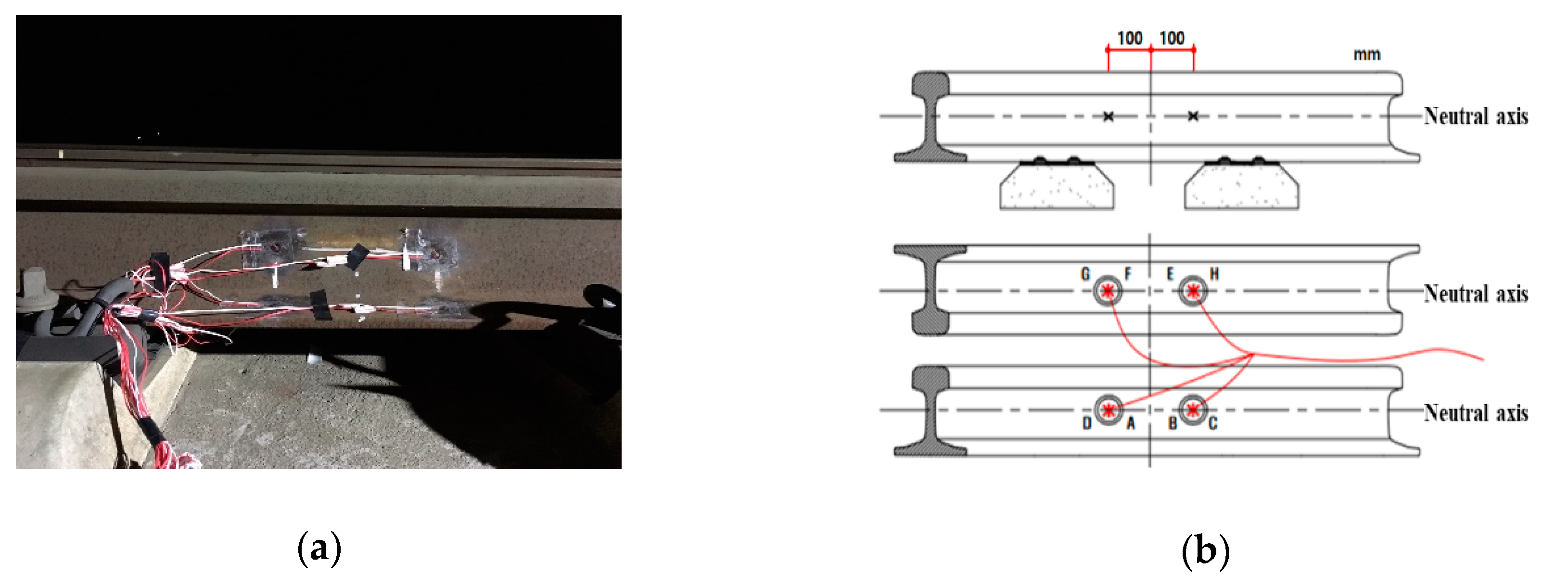
A wheel load is transferred from a train body mass through the wheel to the rail. The wheel load applied to the rail and the track system while a train is running can be measured either on the vehicle or on the track system. When the wheel load is measured on the vehicle, the track irregularities, such as torsion, unevenness, etc., can be figured out; when it is measured from the track, the wheel load at a specific measurement point can be evaluated as the train passes [16]. The wheel load was measured using strain gauges set on a rail web as shown in Figure 6. The wheel load measurement data can be distorted or the data can be lost since the speed of the passing train is very high. Thus, a sampling frequency of 1000 Hz was set. Noise components other than wheel load signal were digitally filtered based on a frequency analysis to enhance the reliability of the data.
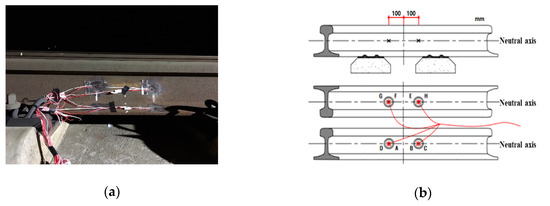
Figure 6.
Wheel load gauge installed. (a) Gauge adhesion; (b) Instruction.
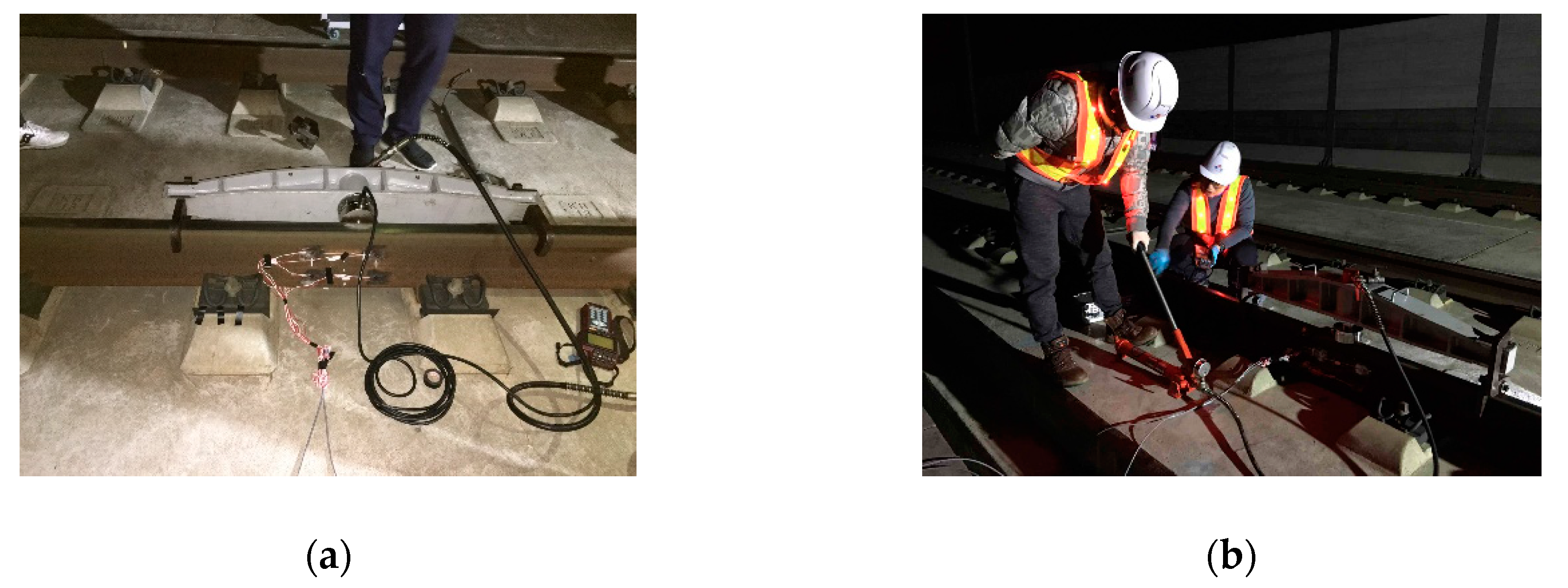
A calibration process of the wheel load using a pressure jack and a loadcell was performed to convert the strain data to actual wheel load as shown in Figure 7. The wheel load can be determined by linear regression from the static wheel load data through the calibration process.
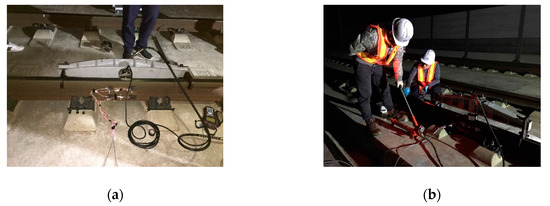
Figure 7.
Wheel load calibrator setting and calibrating. (a) Calibrator setting; (b) Wheel load calibration.
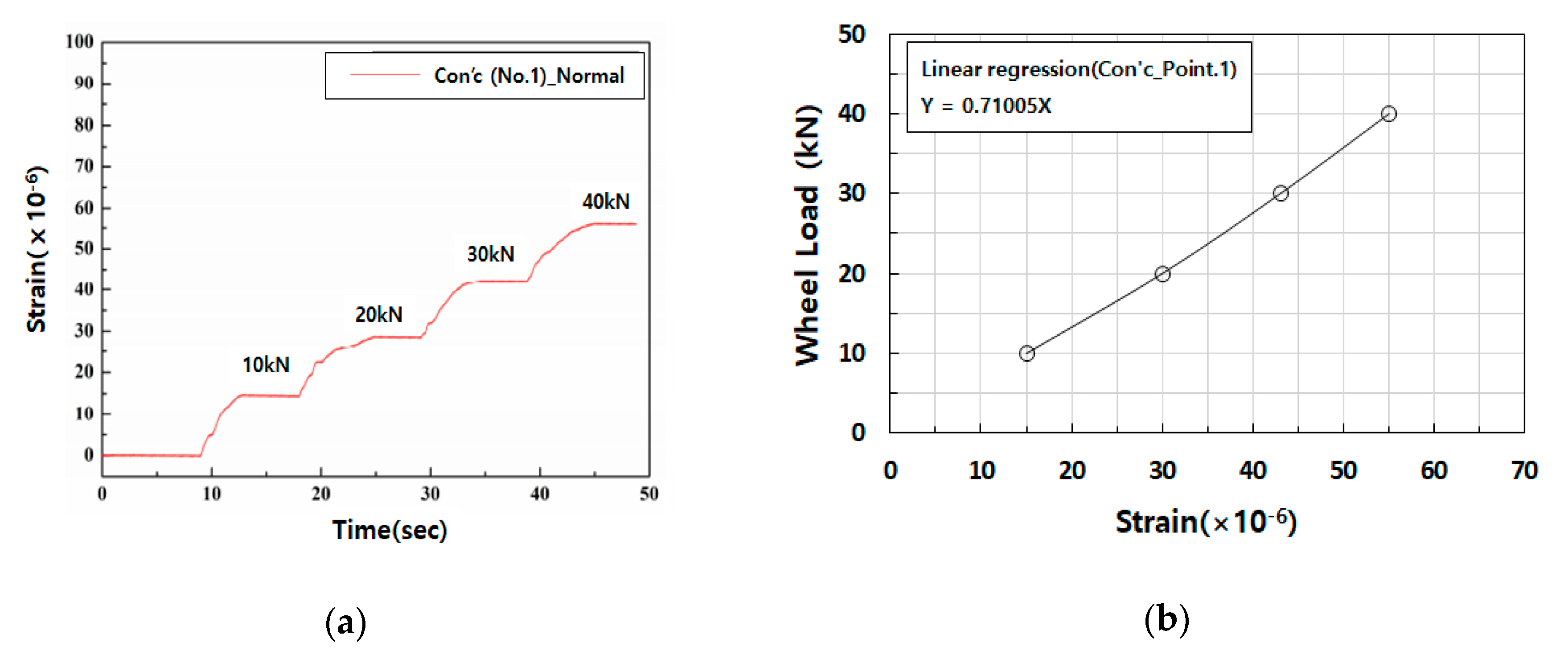
Figure 8 shows the results of calibration, and the measured strain data, which can be used to evaluate the wheel load using Figure 8b.
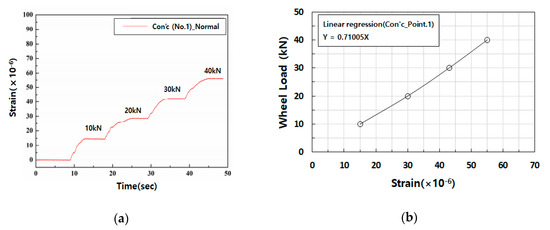
Figure 8.
Wheel load calibration result and linear regression graph. (a) Result of calibration; (b) Linear regression.
3.4. Wheel Load Measurement Results
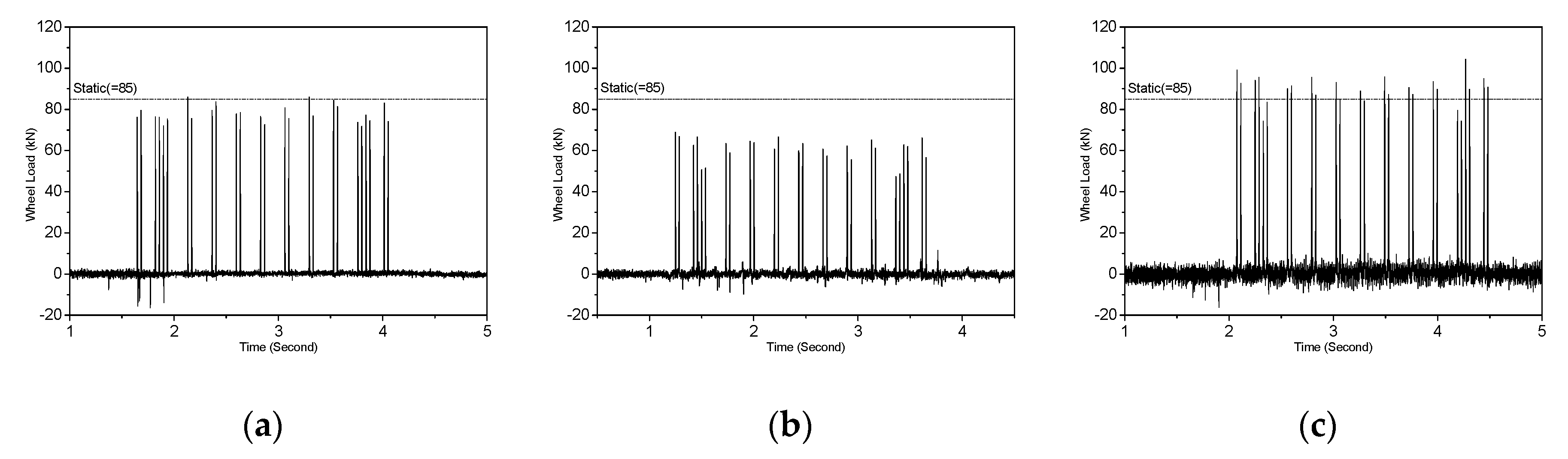
According to the measurement, the wheel loads during train operation at each point are as shown in Figure 9. Peaks in the graph are load values generated when the wheels pass through the strain gauge attached to the rail, and oscillations around zeros are electrical signals and noise components of the strain gauge. An average train speed was measured at 291.4 km/h.
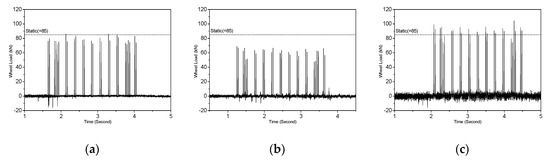
Figure 9.
Results of wheel load measured at each point. (a) Point 1; (b) Point 2; (c) Point 3 and 4.
The dynamic wheel load from the earthwork start section (Point 1) to the deflection section (Point 2) was reduced by 8%, and a maximum wheel unloading ratio for static wheel load (85 kN) was 0.16. The train wheel kept maintained contact with the rail when the train passed the settled section, but the car body was moving upward due to an inertia force, causing the wheel–suspension spring expansion. As a result of those behaviors, the wheel loads at Point 2 were decreased.
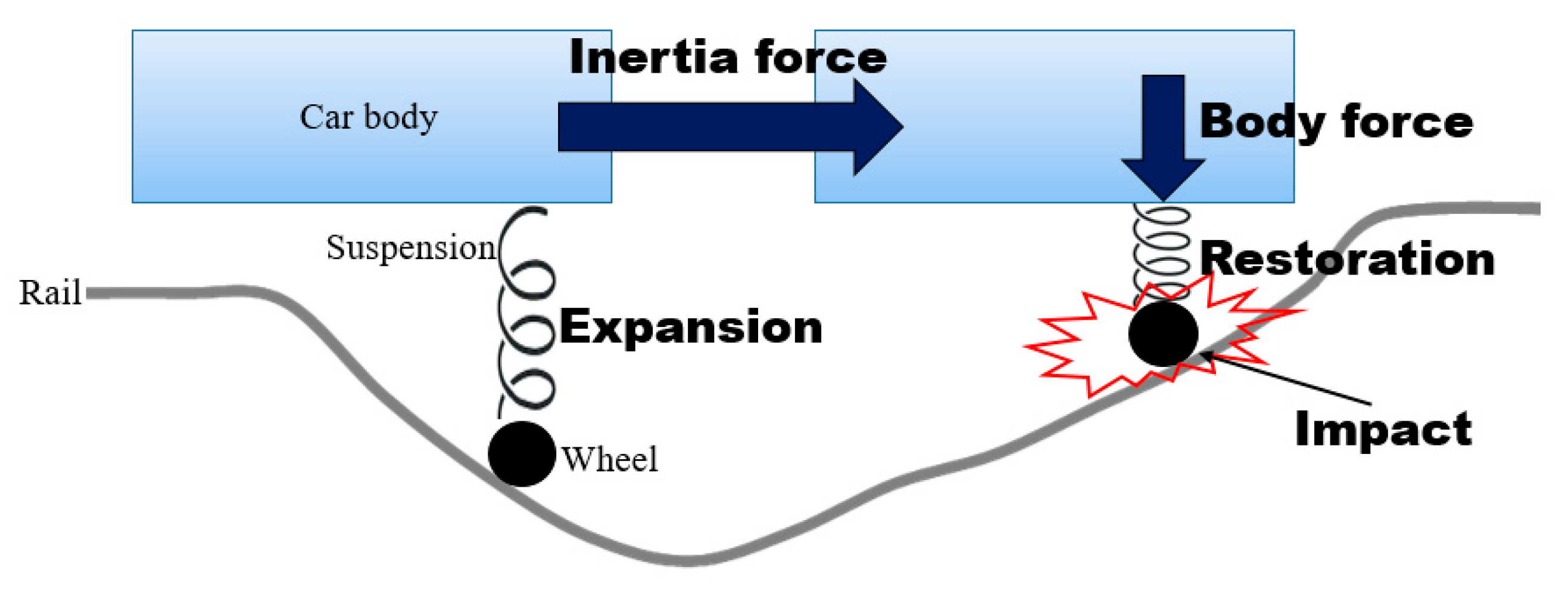
At Points 3 and 4 where rail deflection was restored, the wheel loads appeared to be similar and were increased by 26% compared to Point 2. Since the separation distance between the vehicle and the wheel was reduced, the impact load was generated by a body force of the car body and the restoring force of the axle spring (Figure 10).
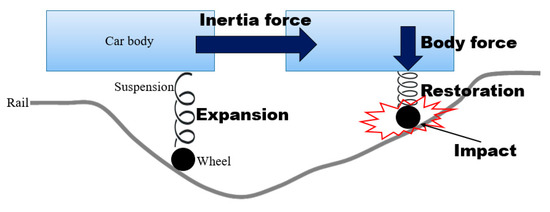
Figure 10.
Impact load diagram in field measurements.
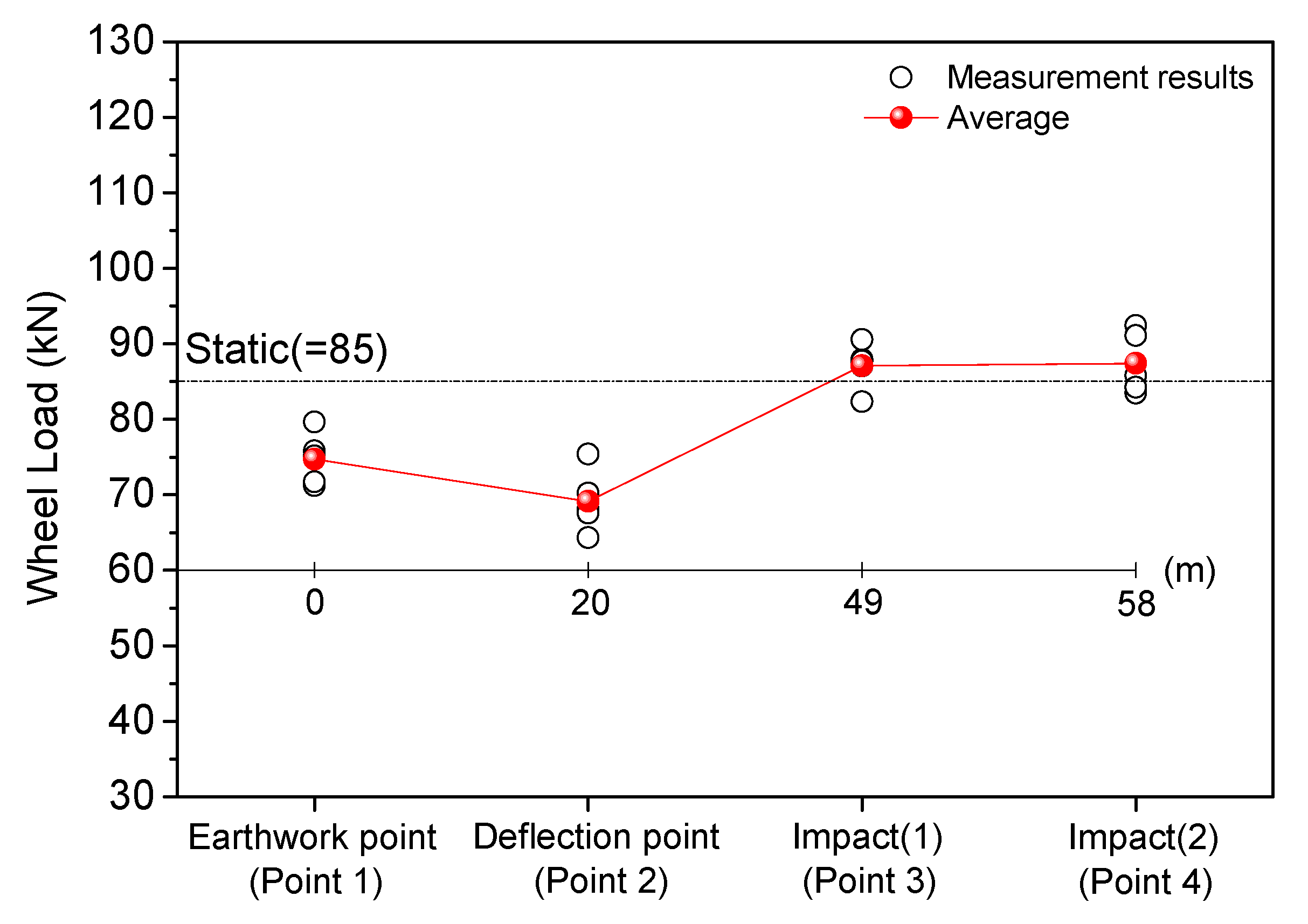
The impact occurred 49 to 58 m from the start point of the earthwork section, all of which are summarized in Figure 11.
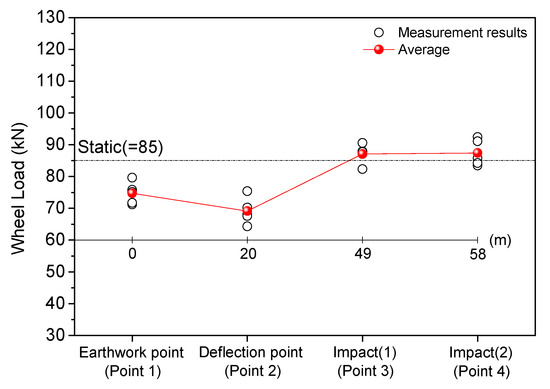
Figure 11.
Results of measurement.
The measured results show that the increased wheel loads from the impact load and decreased wheel loads from track irregularities are within an acceptable loading range (wheel unloading ratio ) as defined by the Korean Standards for Railway Vehicle Safety Criteria [17]. However, continuously applied impact loads may cause rail and track damage.
4. Numerical Analysis
4.1. Numerical Analysis Summary
4.1.1. Vehicle Model Including Suspension System
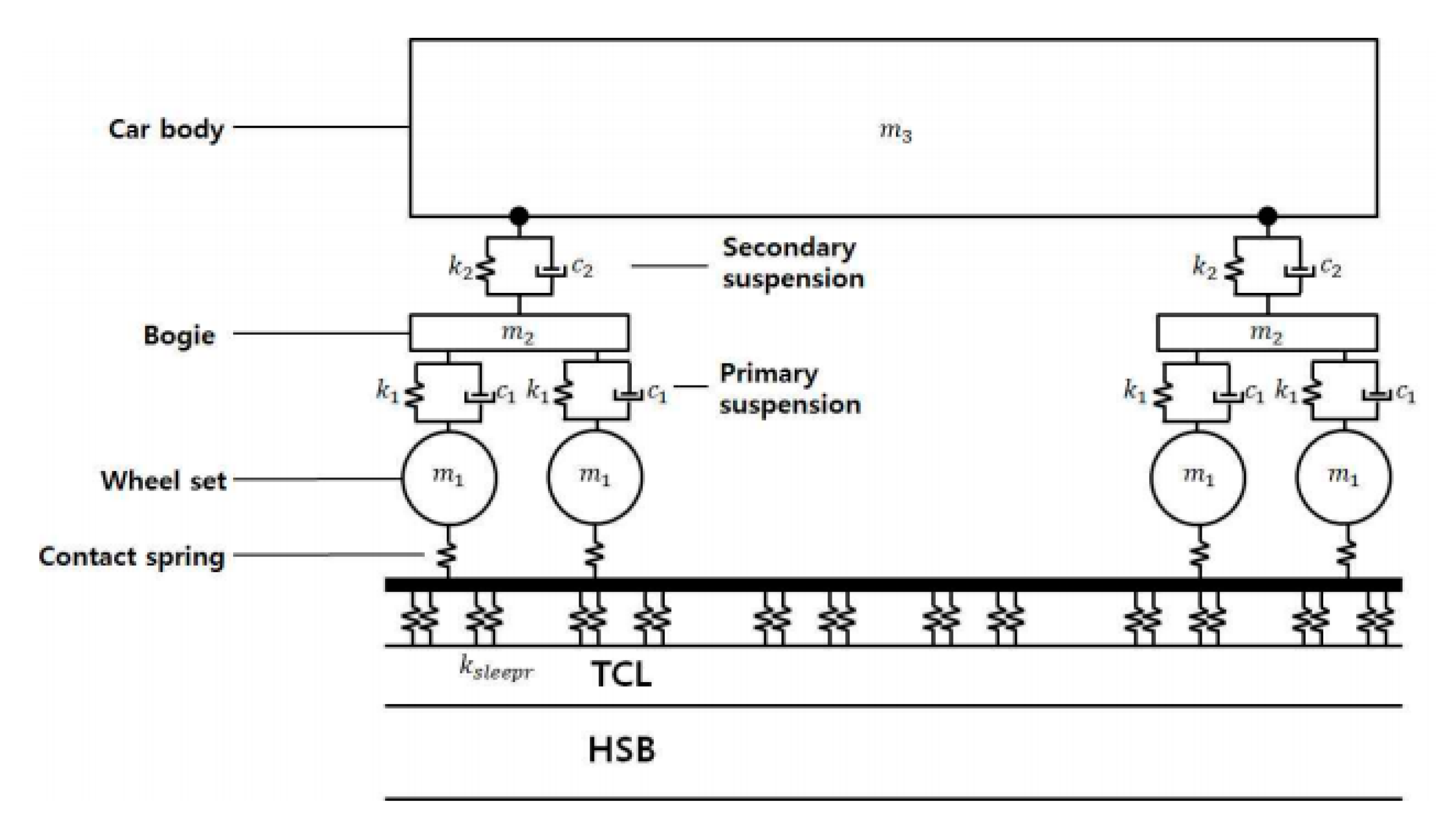
A model for analyses of a vehicle load including a suspension system is as shown in Figure 12. The railroad vehicle consists of a car body, bogies, and axles, which are connected by a bolster spring and the suspension system on the axle and the axle journal.
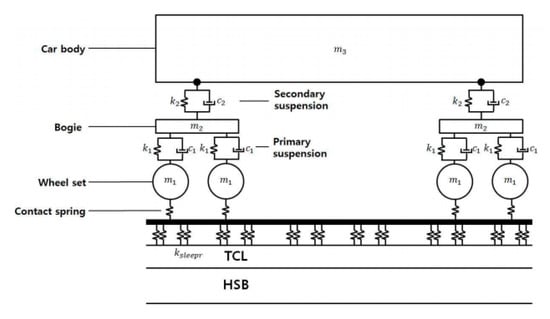
Figure 12.
Moving load of the vehicle including suspension system.
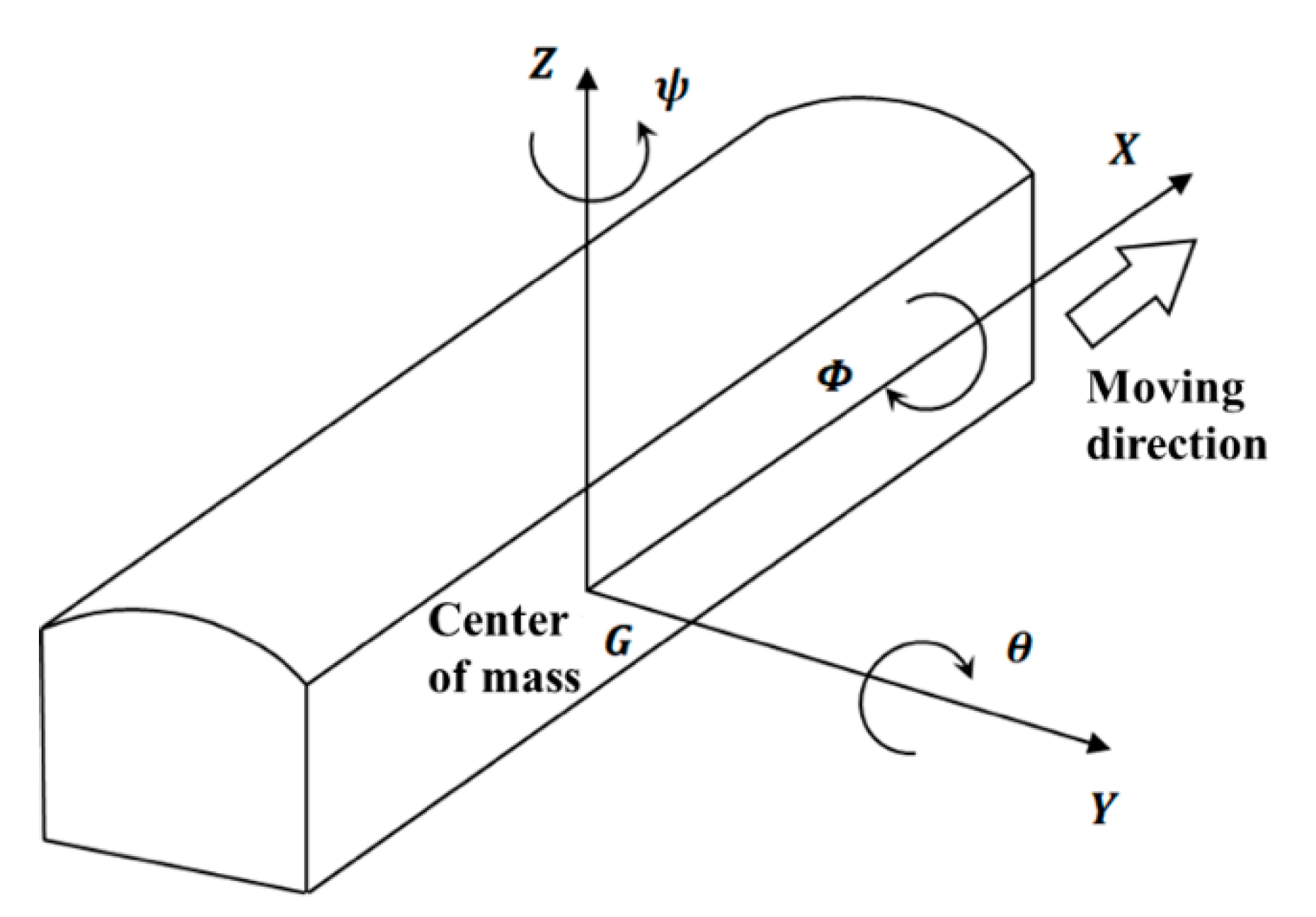
A sprung mass and an unsprung mass generate translational vibrations and rotational motions while the train runs. Of the six vibrations, three vibrations are related to the unsprung mass and the bogie and the other three vibrations are related to the motion of the sprung and unsprung mass [2]. Thus, the rigid motion of the vehicle running at a constant speed consists of six degrees of freedom, which include the translational motions in the x, y, z directions and the rotational motions in the (Rolling), (Yawing), and (Pitching) directions, as shown in Figure 13.
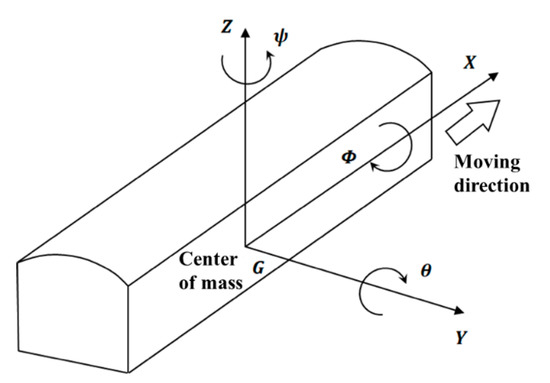
Figure 13.
Rigid motion of vehicle.
The motion generated by is considered as being the vertical direction only, but it is in fact influenced transversely as well. Thus, vertical and transverse springs and dampers are compressed or tensioned by rolling. The motion generated by is also considered the transverse and longitudinal direction according to same principle. The motion generated by is considered a vertical and longitudinal displacement.
A vehicle–track interaction system to the vertical motion can be modeled by the semi-mass of the car body, the bogie, and the unsprung mass [18]. In such a case, an equation of the vertical motion of the car body is as in Equation (6):
where : 1/2 of car body mass; : Damping coefficient of secondary suspension system; : Spring coefficient of secondary suspension system; : 1/2 of car body weight.
Equations of the vertical and rotational motions of the bogie can be represented by Equations (7) and (8):
where : Vertical displacement of bogie; : Rotational displacement of bogie; : Mass of bogie; : Rotational inertia moment of bogie; : Damping coefficient of primary suspension system; : Spring coefficient of primary suspension system; : Damping coefficient of secondary suspension system; : Spring coefficient of secondary suspension system; : Mass of bogie; : 1/2 of wheelbase.
Equations of motion by two unsprung masses of the wheel and axle can be represented as follows:
where : Weight of first unsprung mass; : Weight of second unsprung mass; : Roughness of the bottom of first unsprung mass; : Roughness of the bottom of second unsprung mass.
Interaction forces between the wheel and the rail are determined using the nonlinear Hertzian contact theory as follows:
where is the Hertzian wheel–rail contact coefficient, is the wheel–rail deformation (compression) in the vertical direction, and is Hertzian constant dependent on a radius of curvature of the wheel, the rail, and material properties.
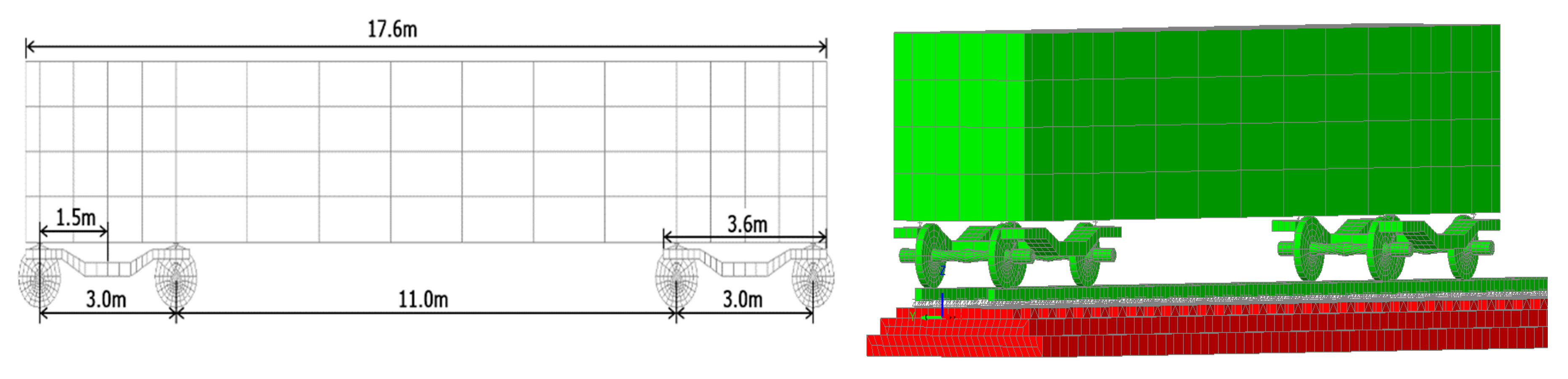
The vehicle model simulated for the numerical analysis was a KTX locomotive. The vehicle load consists of the wheel, bogies, and car body loads, which are connected by the primary and secondary suspension system. The suspension system is the device composed of the spring and the damper to connect the load elements with each other. The model of the vehicle load including the suspension system is as shown in Figure 14. The vehicle model shown in Figure 12 was simulated identically to the FEM model. The properties of the train used for the analysis are described in Table 1.
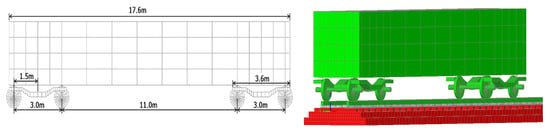
Figure 14.
Diagram of vehicle model.

Table 1.
Material properties of vehicle model.
4.1.2. Track and Trackbed Modeling
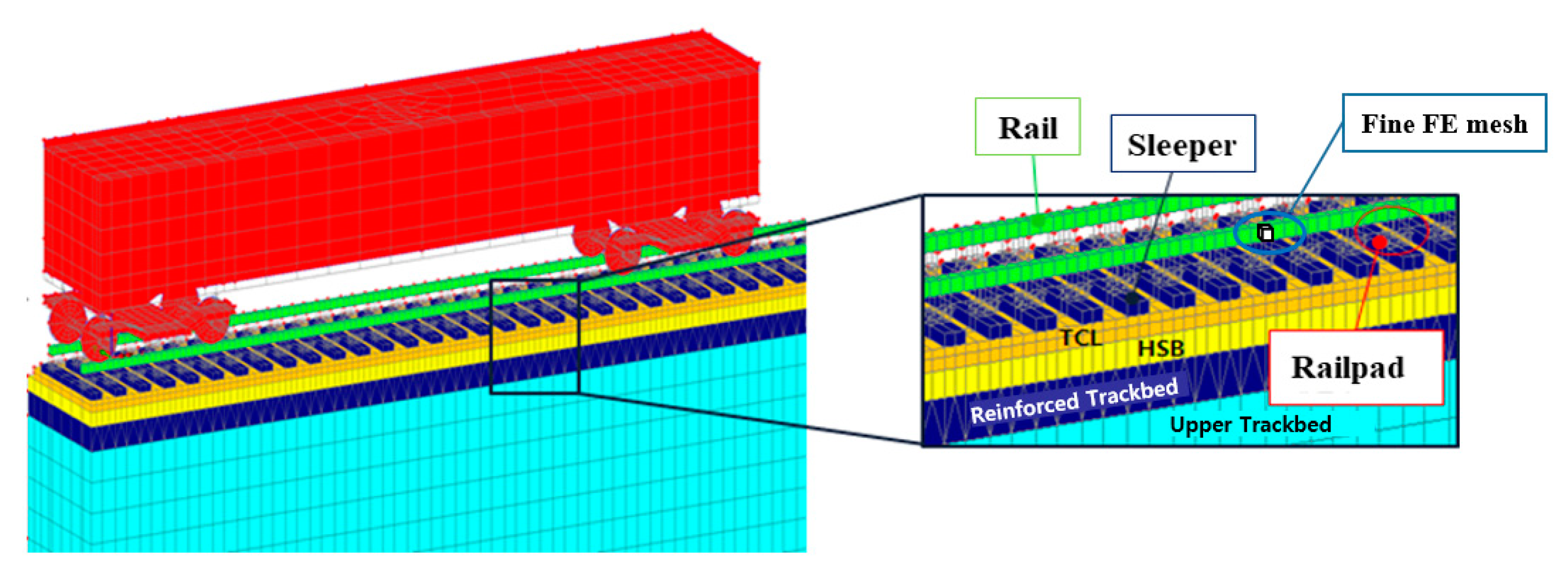
An accurate track and trackbed model is needed to simulate the track settlement due to the different support stiffness. In this study, a 3D solid model of all track elements was created, and the model was composed of rail, railpad, sleeper, track concrete layer (TCL), Hydraulically stabilized base (HSB), reinforced trackbed, upper trackbed, and lower trackbed. An elastic model was applied to the rail, sleeper, TCL, HSB, reinforced trackbed, and the Mohr–Coulomb model was applied to the upper and lower trackbed. The rail was applied by UIC 60 kg and was modeled as a cuboid without considering rail surface defects. The Hertzian nonlinear rigidity was applied to the wheel–rail contact, so the vehicle and track were considered as a monolithic system in the analysis. Size and spacing of the sleeper was modeled by referring to the KTX mainline standard and UIC 713 R Concrete sleeper [19]. The railpad was modeled as a combination of massless spring–damper couple [19,20,21,22,23]. It was modeled with an EVA pad, which has the spring factor kN/mm and the damping coefficient 29 kN/m [13]. Slide line was used to move while the wheel maintained contact with the rail. Damping ratios in the analysis were assumed to be 2% for the rail, sleeper, TCL, and HSB, and 5% for the reinforced trackbed, upper, and lower trackbed [24]. The model was composed of a very fine mesh, the aspect ratio of which did not exceed 1 to 4, to simulate a rail vertical deflection in the range of millimeters. Figure 15 shows the model used for the analysis and the material properties are summarized in Table 2.
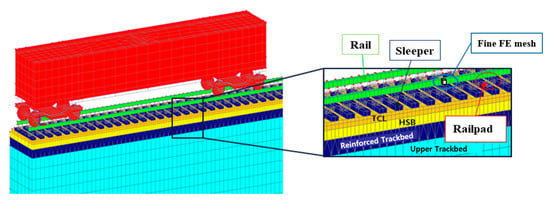
Figure 15.
Diagram of track model.
Table 2.
Material properties of track model.
An infinite element was used to set lateral and bottom boundaries in order to eliminate any reflected forces and dynamic waves from the boundaries. The stress caused by the vehicle load was reduced by up to 85% when the depth was 3 m or more [25], and thus, modeling was carried out with the 3 m of the upper trackbed and 2 m of the lower trackbed.
4.1.3. Numerical Analysis Model Considering Site Conditions
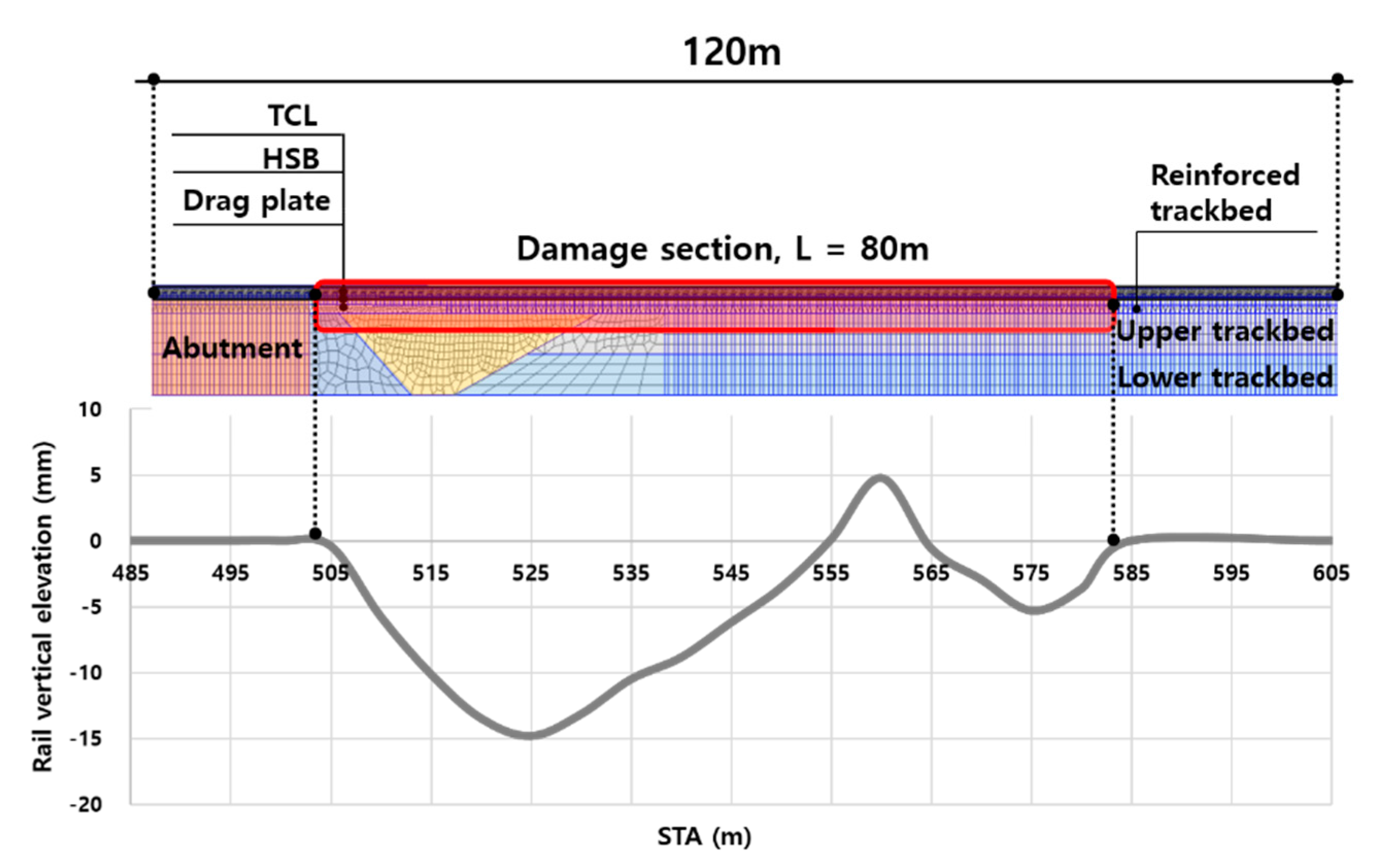
The measured wheel load was decreased after rail vertical deflection occurred at the transition section, and at the train speed of 300 km/h, the wheel load was increased at the earthwork section beyond 49 ~ 58 m. A numerical analysis model was developed considering trackbed settlements and track irregularities to verify the proposed vehicle and track model. The numerical modeling of the transition section, considering the track deformation that is the same as field measured track deformed profiles, is shown in Figure 16.
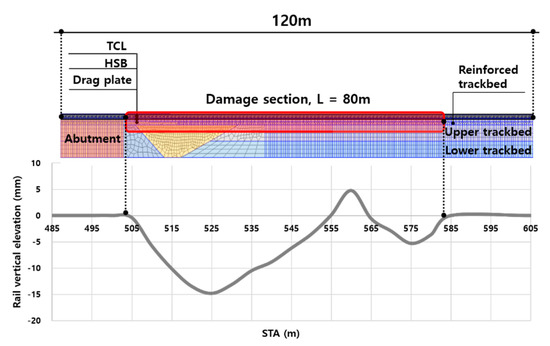
Figure 16.
Modeling of transition section considering site conditions.
The length of the numerical analysis model was set to 120 m to completely distribute the stress generated at 40~60 m where the impact load was expected to occur. The train speed was assumed to be 300 km/h, which was the same as the operating speed. As the time taken to run 120 m was 1.44 s, the analysis was conducted for 1.5 s in the unit of 0.01 s so that the train completely passed the model.
4.2. Validation of Numerical Modeling
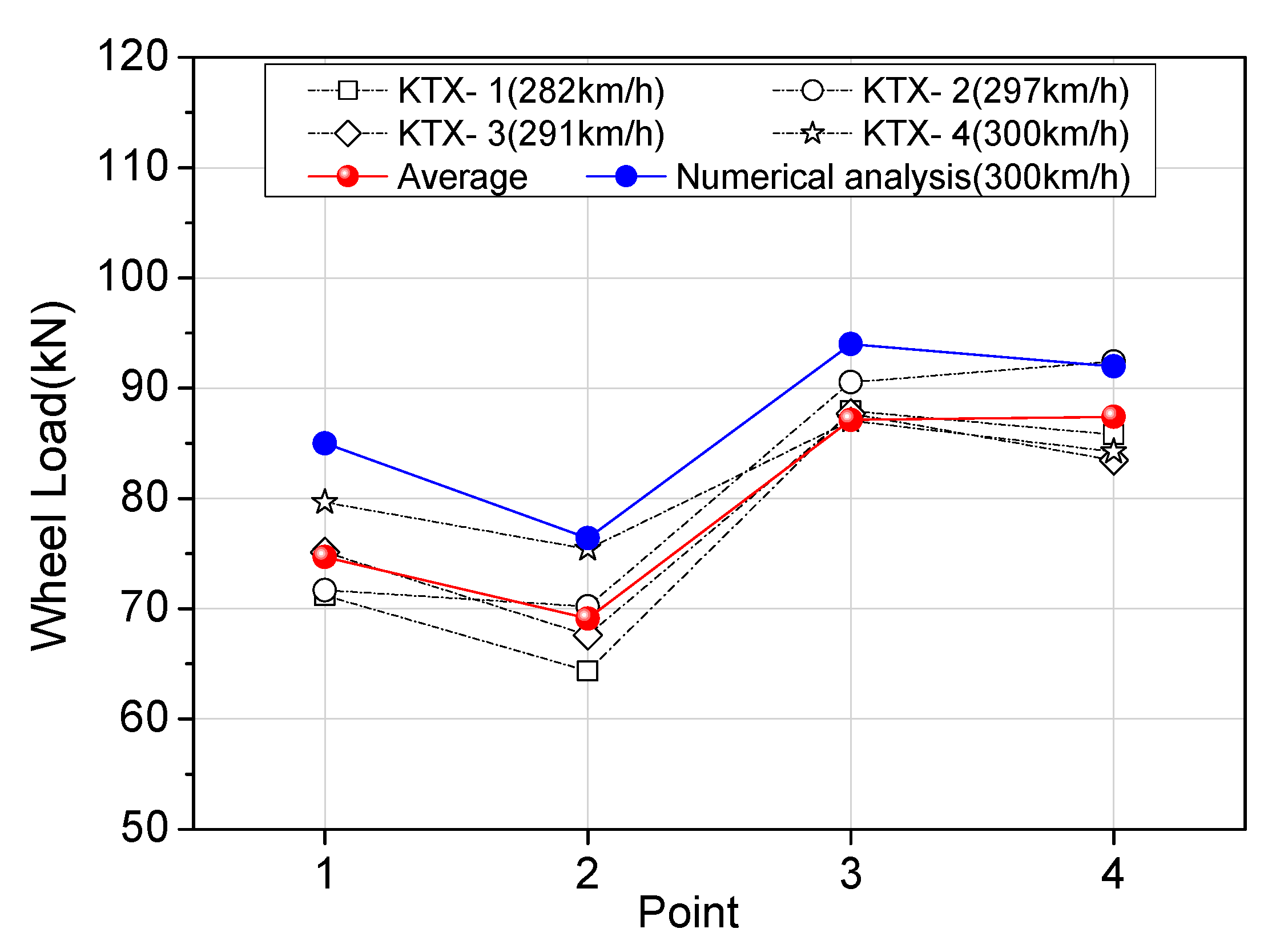
Figure 17 compares the result obtained through the numerical analysis with the measured value in Chapter 3. On the basis of Point 1 (85 kN), the dynamic wheel load decreased by 9.2% at Point 2 but increased by 10.5% and 8.0% at Points 3 and 4, respectively, which were similar with the values of the field measurement. This means that when the train ran over the rail deflection section where the track irregularities and the trackbed settlement occurred, the changing wheel load due to the expansion and restoration of the spring between the car body and the wheel seemed to be incorporated into the numerical analysis. The wheel load generally appeared to be a little greater in the numerical analysis than in the measured values, which was attributable to the fact that the field measurement considered various factors, such as wind pressure and rail–wheel wear, while the numerical analysis considered factors relating to the wheel load only.
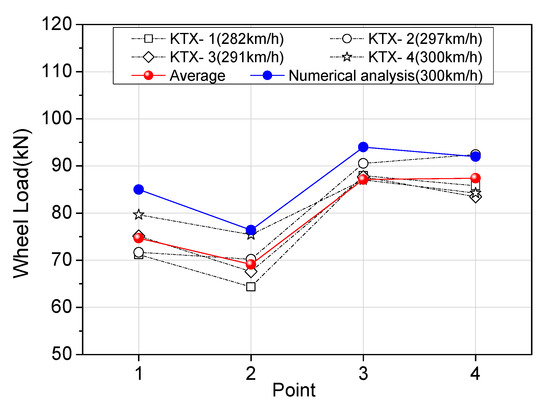
Figure 17.
Comparison of wheel load variation by section in the measurement and analysis.
As explained above, the numerical modeling used in this study can be interpreted by accurately reflecting the characteristics of the deformed concrete slab track.
4.3. Analysis of Dynamic Response of Concrete Slab Track
The dynamic behaviors of the deformed concrete slab track due to the impact load were investigated. The concrete track system on the earthwork in Korea is composed of a track concrete layer and a hydraulically stabilized base, as shown in Figure 18.
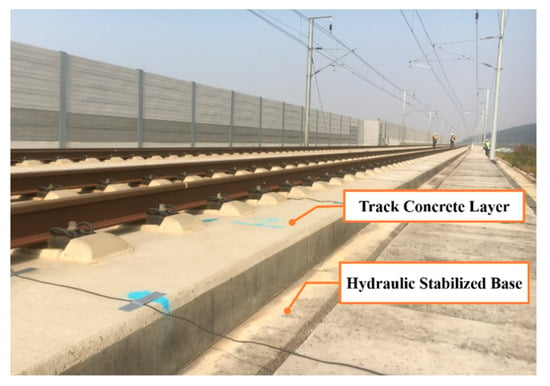
Figure 18.
Track system of high-speed railway in Korea.
The track concrete layer and the hydraulically stabilized base were constructed with reinforced concrete and plain concrete, respectively. Thus, the track in the numerical modeling can be divided into the TCL (track concrete layer) layer and the HSB (hydraulically stabilized base) layer, and the vertical stresses of these two layers were analyzed. A correlation between vertical stresses of the track and allowable stresses suggested in the Korean Railroad Design Standard (KR C-14040) was also analyzed [26]. The numerical analysis was performed by increasing the train speed from 100 to 300 km/h in 100 km/h increments. Total time taken to pass the model varied from 1.5 s to 4.5 s depending on the train speed, so as to ensure the train would completely pass the track system.
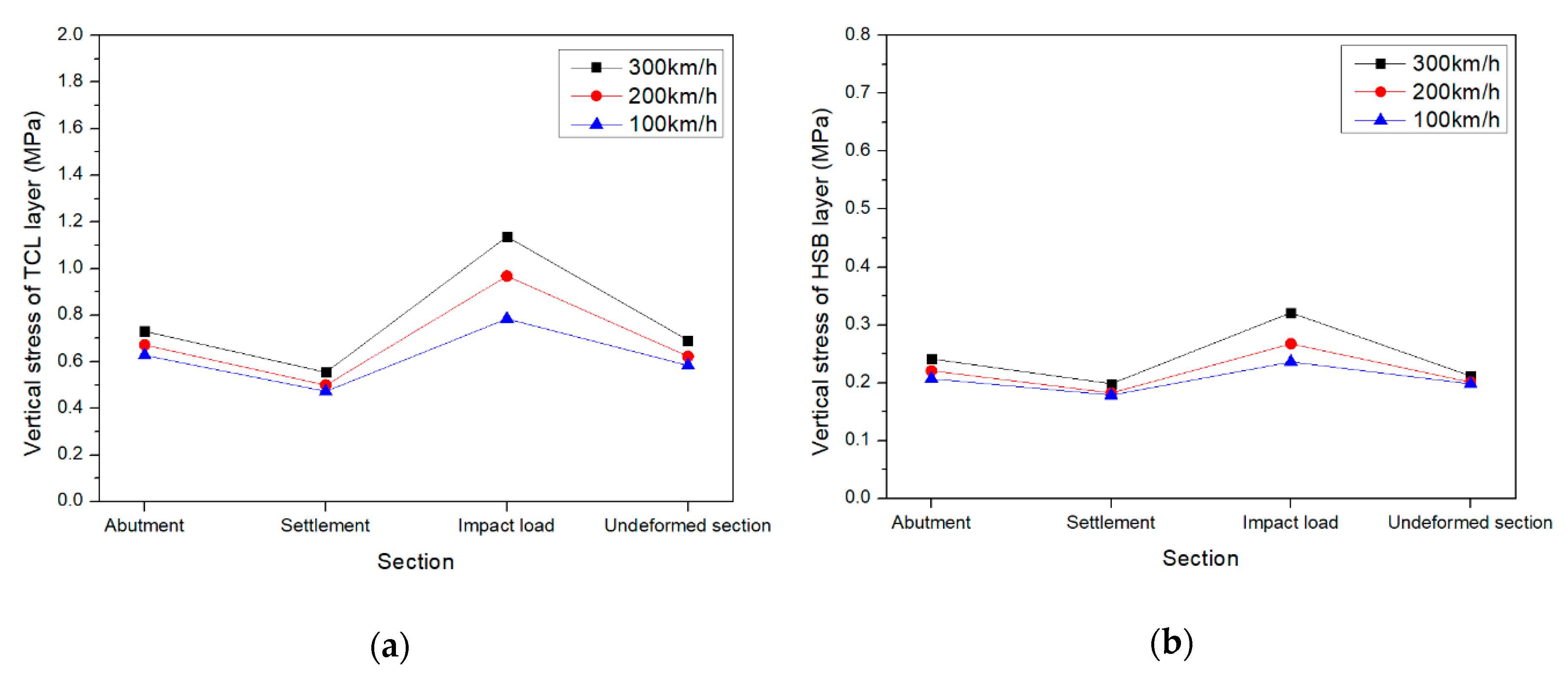
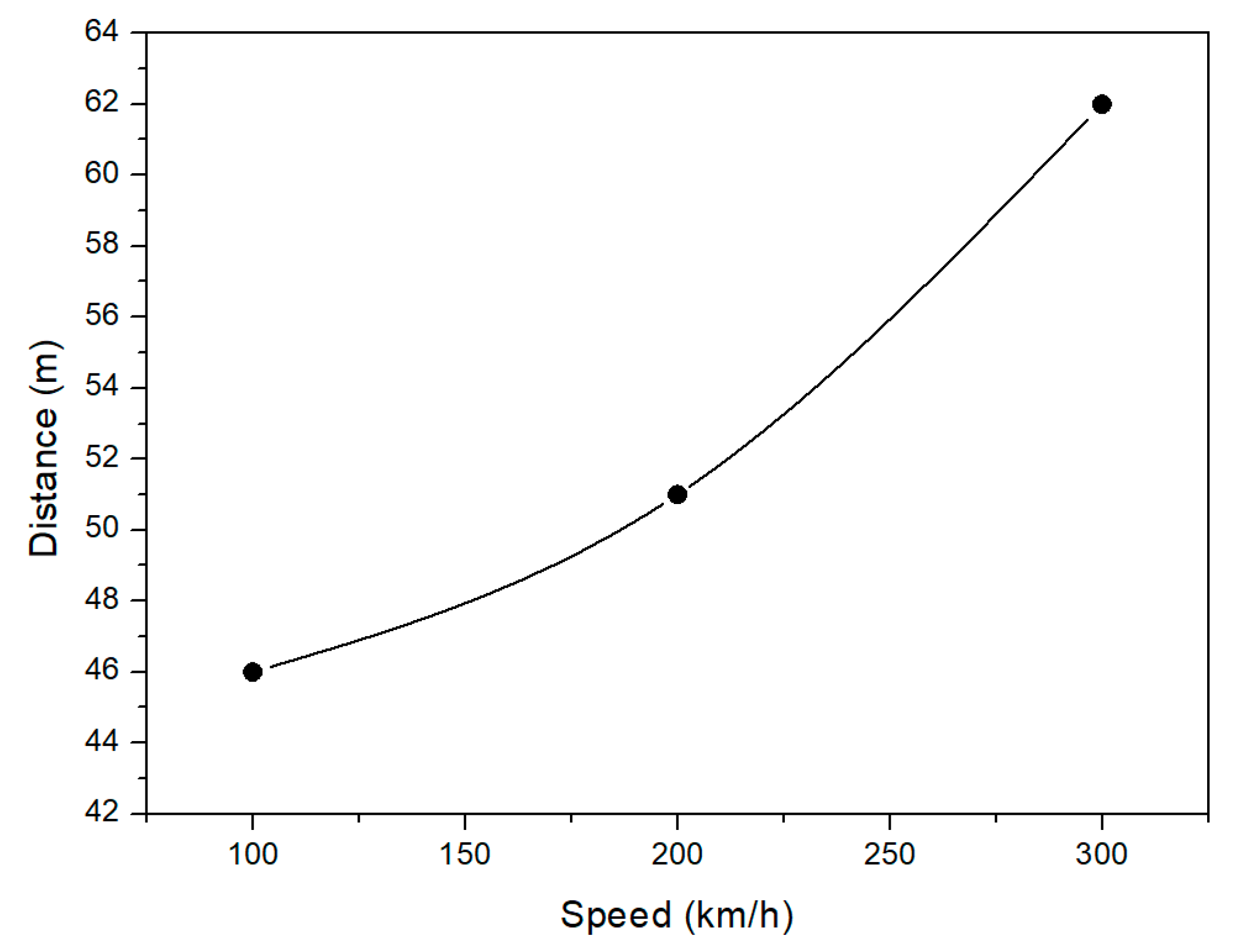
Figure 19 shows the vertical stresses of the TCL and HSB layers according to sections of the transition zone. The stress was reduced in the settlement section and then increased due to the impact load at 46 to 62 m from the bridge–earthwork boundary where rail deflection was restored. In addition, distances between the impact load applied point and the bridge–earthwork boundary were increased as the train speed increases as shown in Figure 20. The distance when the train speed increases from 200 to 300 km/h is 2.2 times farther nonlinearly than when it increases from 100 to 200 km/h.
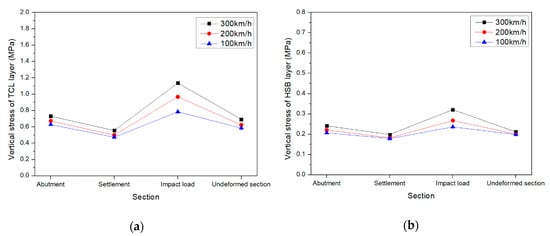
Figure 19.
Vertical stresses of the concrete slab track. (a) Track concrete layer (TCL) layer; (b) Hydraulically stabilized base (HSB) layer.
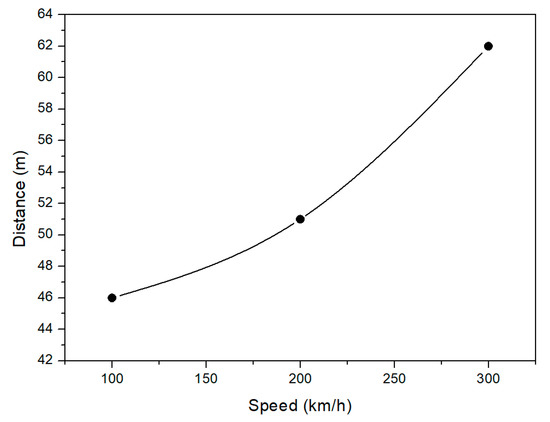
Figure 20.
Distances between the point where the impact load occurred and the bridge–earthwork boundary by train speeds.
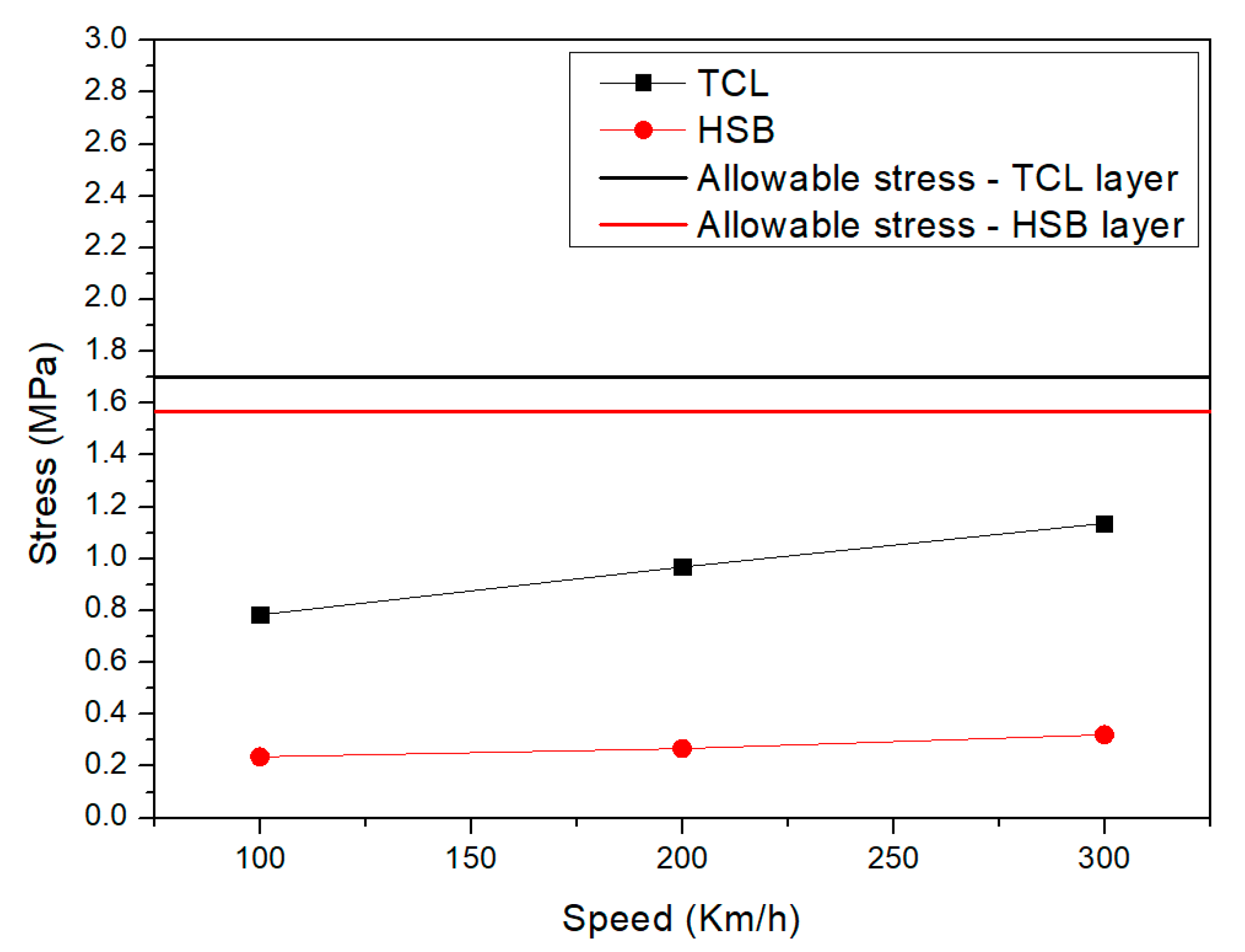
Variations of stresses at the impact load point according to train speeds are shown in Figure 21. It was found that the stress acting on the concrete track increased with the train speed. The stresses of the TCL and HSB layers were distributed from 0.73 to 1.13 MPa and from 0.24 to 0.32 MPa, respectively. Therefore, the stress increase of the TCL layer, which has a linear trend, is greater than that of the HSB layer when the train speed increases.
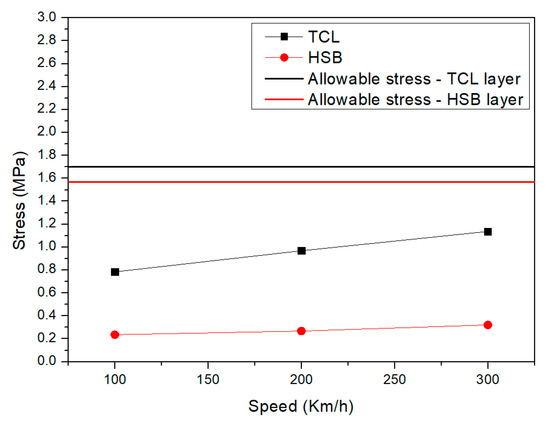
Figure 21.
Vertical stress of concrete track by train speeds.
The maximum stress of the TCL and HSB layers at the speed of 300 km/h is 1.13 MPa and 0.78 MPa, which satisfies the allowable standard of 1.7 MPa and 1.57 MPa.
5. Conclusions
Transition zones are considered to be vulnerable and are often deformed in railway embankments. The dynamic characteristics of deformed concrete slab track in the transition zone are different from the undeformed track. In this study, an FEM numerical analysis was conducted by the vehicle model consisting of a car body, primary and secondary suspension system, and the concrete slab track model, including all components of track and trackbed in three dimensions in the bridge–embankment transition zone under deformed conditions. The numerical model was verified by comparing it with the measured field data. This model can be used for various analyses related to train–track interactions.
Dynamic characteristics from the impact load, such as wheel loads on the rail and stresses in concrete slab track, under various train speeds are shown in the results of this study.
According to field measurements and the numerical analysis, the wheel load decreased at the settlement section due to the increasing separation between car body and wheel. The wheel load was significantly increased in the section where the settlement was restored, which is attributable to the impact load caused by the restoring force of axle springs and the increased track level.
Vertical stresses on the concrete slab track also decreased in the settlement section, and maximum stresses due to the impact load were applied around 46 to 62 m according to train speeds. The distances between the point where the impact load occurred and the bridge–earthwork boundary were increased as the train speed increased. The points where the impact load occurred were much farther away when the train speed increased from 200 to 300 km/h as compared to 100 to 200 km/h. The stress increase of the TCL layer, which demonstrated a linear trend, was greater than that of the HSB layer when the train speed increased. The maximum stresses on the concrete slab were within the acceptable stresses as defined by Korean railway maintenance standard.
Author Contributions
Conceptualization and methodology, S.P. and J.Y.K. and K.-H.C.; software, S.P. and J.K.; validation, S.L., J.K.; formal analysis, S.P.; investigation, S.P. and J.Y.K. and S.L.; resources, S.L.; data curation, J.K.; writing—original draft preparation, S.P. and J.Y.K.; writing—review and editing, K.-H.C.; supervision and project administration, K.-H.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Ministry of Land, Infrastructure and Transport in Korea, grant number 20CTAP-C152137-02.
Acknowledgments
The researchers thank Seung-Joo Lee in LUSAS KOREA Co. for their great help in this research.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Kim, J.Y. Trackbed Stress Analysis under Concrete Slab Track According to Speed Variation of High Speed Train. Ph.D. Thesis, Seoul National University of Science and Technology, Seoul, Korea, 2018. [Google Scholar]
- Baek, C.J. A Numerical Study on the Behavior Characteristics with Different Loading Cases. Master’s Thesis, Seoul National University of Science and Technology, Seoul, Korea, 2014. [Google Scholar]
- Dimitrovová, Z.; Varandas, J.N. Critical velocity of a load moving on a beam with a sudden change of foundation stiffness: Applications to high-speed trains. Comput. Struct. 2009, 87, 1224–1232. [Google Scholar] [CrossRef]
- Ang, K.K.; Dai, J. Response analysis of high-speed rail system accounting for abrupt change of foundation stiffness. J. Sound Vibrat. 2013, 332, 2954–2970. [Google Scholar] [CrossRef]
- Hu, P.; Zhang, C.; Chen, S.J.; Wang, Y.; Wang, W.; Duan, W.H. Dynamic responses of bridge–embankment transitions in high speed railway: Field tests and data analyses. Eng. Struct. 2018, 175, 565–576. [Google Scholar] [CrossRef]
- Gao, Y. A 3D dynamic train-track interaction model to study track performance under trains running at critical speed. Master’s Thesis, The Pennsylvania State University, State College, PA, USA, 2013. [Google Scholar]
- Lei, X.; Zhang, B. Influence of Track Stiffness Distribution on Vehicle and Track Interactions in Track Transition. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2010, 224, 592–604. [Google Scholar] [CrossRef]
- Dahlberg, T. Railway Track Stiffness Variations–Consequences and Countermeasures. Int. J. Civil Eng. 2010, 8, 1. [Google Scholar]
- Varandas, J.N.; Hölscher, P.; Silva, M.A.G. Dynamic behaviour of railway tracks on transitions zones. Comput. Struct. 2011, 89, 1468–1479. [Google Scholar] [CrossRef]
- Shahraki, M.; Warnakulasooriya, C.; Witt, K.J. Numerical study of transition zone between ballasted and ballastless railway track. Trans. Geotech. 2015, 3, 58–67. [Google Scholar] [CrossRef]
- Shan, Y.; Albers, B.; Savidis, S.A. Influence of different transition zones on the dynamic response of track–subgrade systems. Comput. Geotech. 2013, 48, 21–28. [Google Scholar] [CrossRef]
- Doyle, N.F. Railway Track Design: A Review of Current Practice; Australian Government Publisher Service: Canberra, Australia, 1980. [Google Scholar]
- Esveld, C. Modern Railway Track; MRT-Productions: Zaltbommel, The Netherlands, 2001; Volume 385. [Google Scholar]
- Lichtberger, B. Track Compendium: Track System, Substructure, Maintenance, Economics; Eurailpress: Hamburg, Germany, 2011. [Google Scholar]
- Shan, Y.; Shu, Y.; Zhou, S. Finite-infinite element coupled analysis on the influence of material parameters on the dynamic properties of transition zones. Construct. Build. Mater. 2017, 148, 548–558. [Google Scholar] [CrossRef]
- Eum, K.Y. Analysis on the Behavior of Trackbed under the Tilting Train Operation at the Curved Track and the Turnout System. Ph.D. Thesis, Seoul National University of Science and Technology, Seoul, Korea, 2008. [Google Scholar]
- Ordinance of Ministry of Land, Infrastructure and Transport. Enforcement Rule of Railway Vehicle Safety Criteria; Ministry of Land, Infrastructure and Transport: Sejong, Korea, 2013; Article 30 (2). [Google Scholar]
- Lee, J. Dynamic Characteristics of High Speed Railway Track with Hanging Sleepers. Ph.D. Thesis, Konkuk University, Seoul, Korea, 2005. [Google Scholar]
- UIC Code 713R. Design of Monoblock Concrete Sleepers; International Union of Railways: Paris, France, 2004. [Google Scholar]
- Sun, Y.Q.; Dhanasekar, M. A dynamic model for the vertical interaction of the rail track and wagon system. Int. J. Solids Struct. 2002, 39, 1337–1359. [Google Scholar] [CrossRef]
- Lei, X.; Noda, N.-A. Analyses of dynamic response of vehicle and track coupling system with random irregularity of track vertical profile. J. Sound Vibrat. 2002, 258, 147–165. [Google Scholar] [CrossRef]
- Zhai, W.; Cai, Z. Dynamic interaction between a lumped mass vehicle and a discretely supported continuous rail track. Comput. Struct. 1997, 63, 987–997. [Google Scholar] [CrossRef]
- Zhang, J.; Gao, Q.; Tan, S.J.; Zhong, W.X. A precise integration method for solving coupled vehicle–track dynamics with nonlinear wheel–rail contact. J. Sound Vibrat. 2012, 331, 4763–4773. [Google Scholar] [CrossRef]
- Psarropoulos, P.N.; Klonaris, G.; Gazetas, G. Seismic earth pressures on rigid and flexible retaining walls. Soil Dynam. Earth Eng. 2005, 25, 795–809. [Google Scholar] [CrossRef]
- Kim, D.R. A Study on the Deformation Behavior Characteristics of the Underground Pipe under the Influence of External Load. Master’s Thesis, Hanyang University, Seoul, Korea, 2007. [Google Scholar]
- Authority, Korea Rail Network. KR C-14040: Concrete Track Structure; Korea Rail Network Authority: Daejeon, Korea, 2019. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).