Transient and Harmonic Unipolar Hysteresis Model of Piezoelectric Actuators Using a System-Level Approach




Abstract
:Featured Application
Abstract
1. Introduction
2. Model Principles
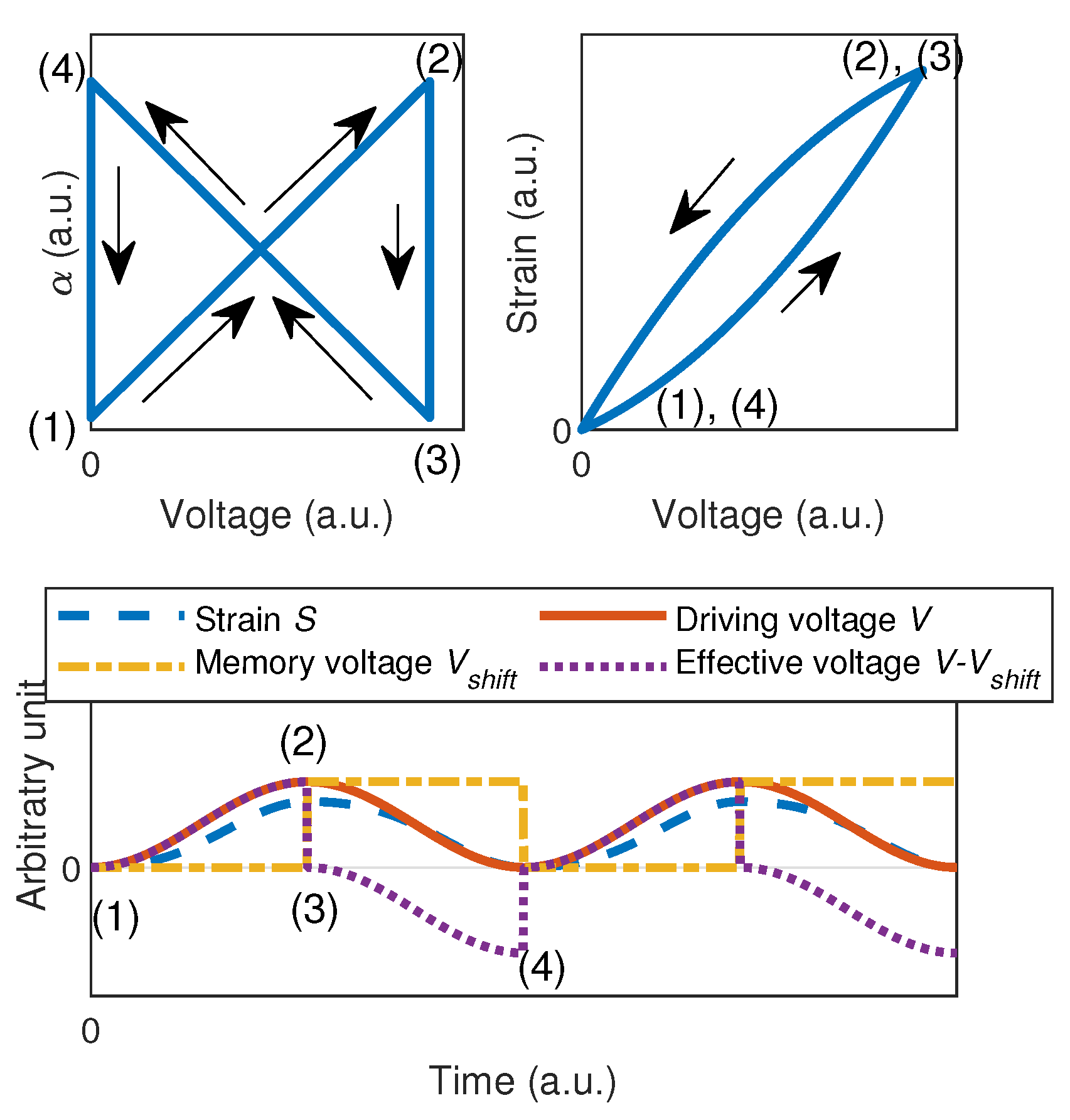
2.1. System-Level Model Basics
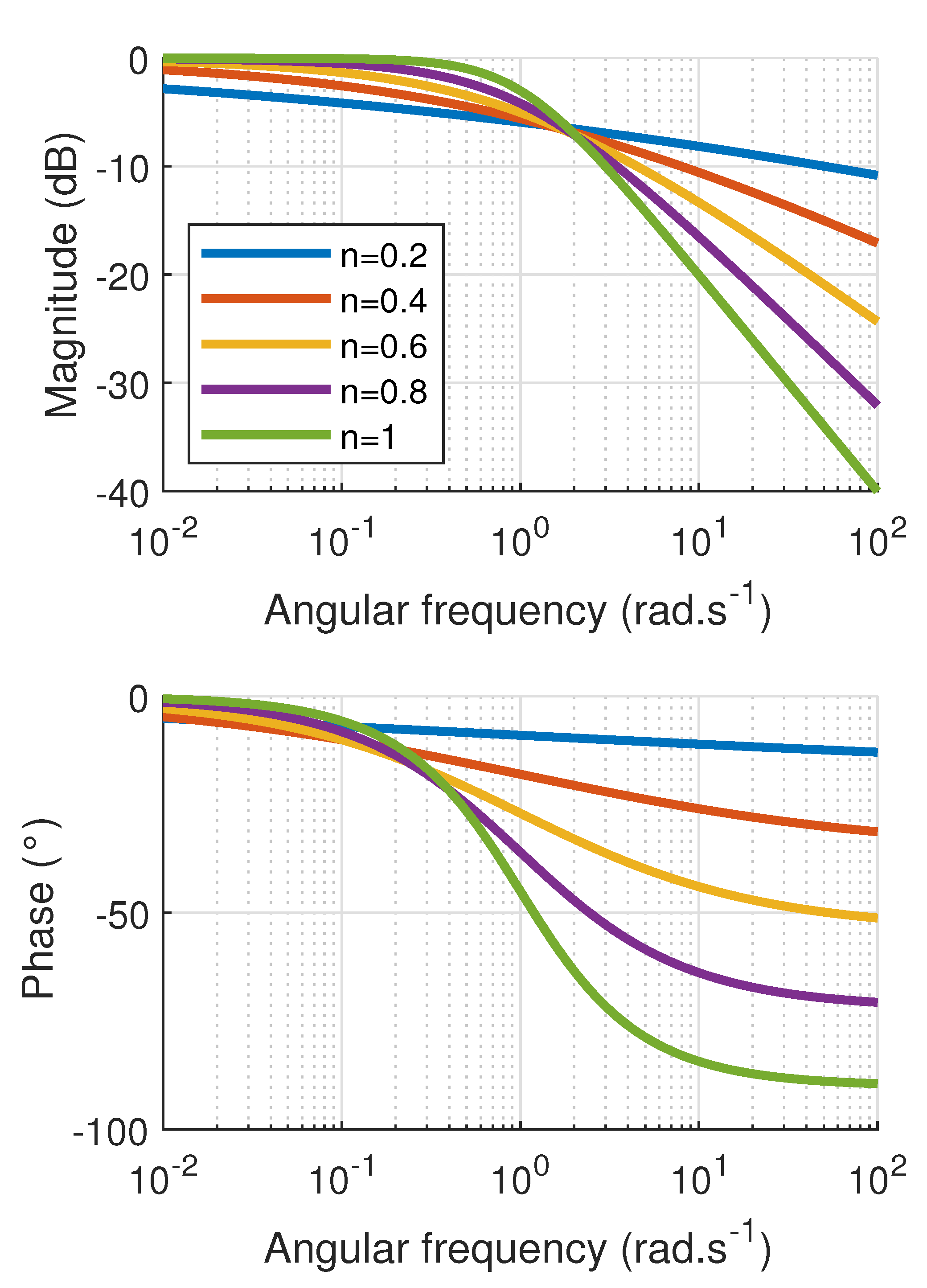
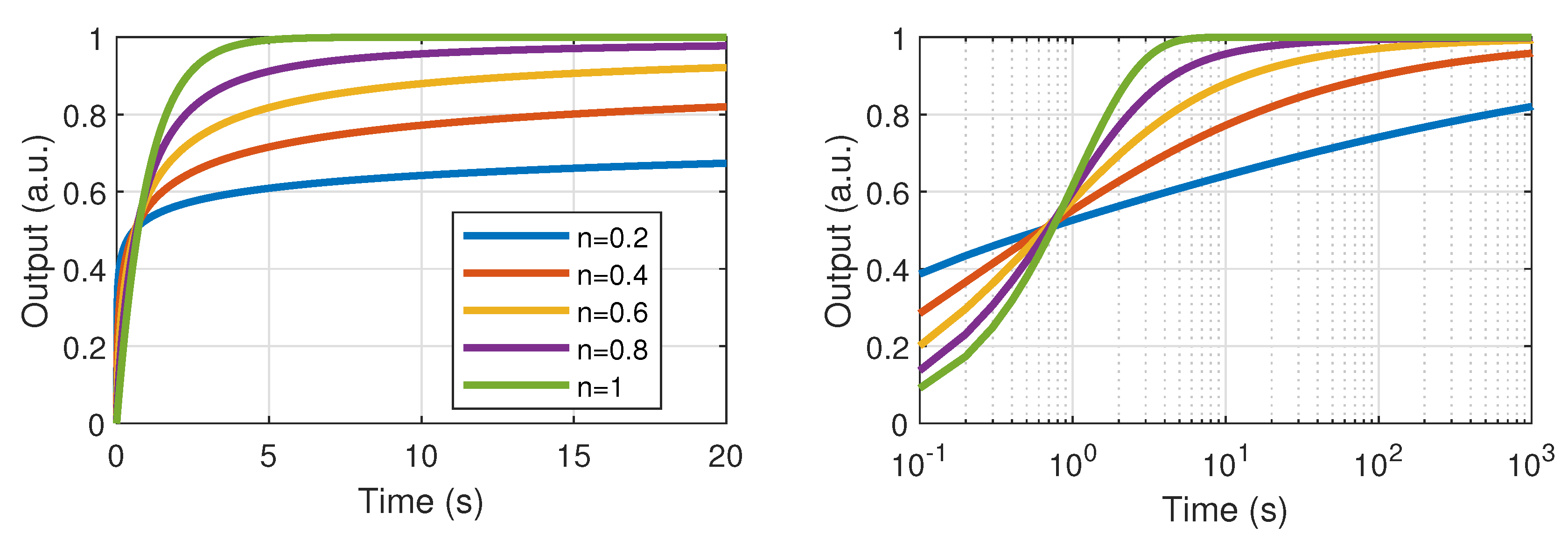
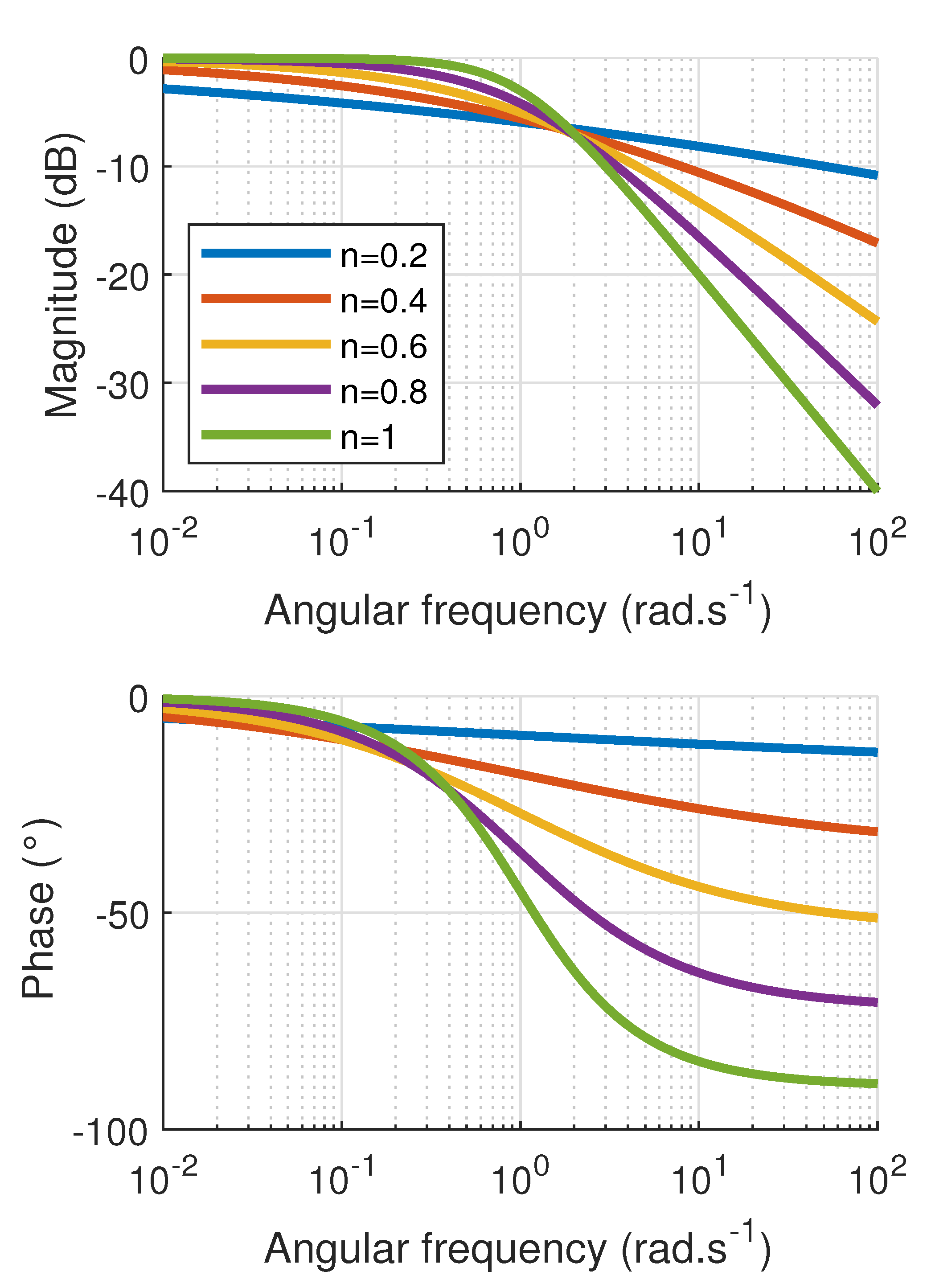
2.2. Dynamic Effects—Electromechanical Transient Regime and Harmonic Relaxation
3. Experimental Validation
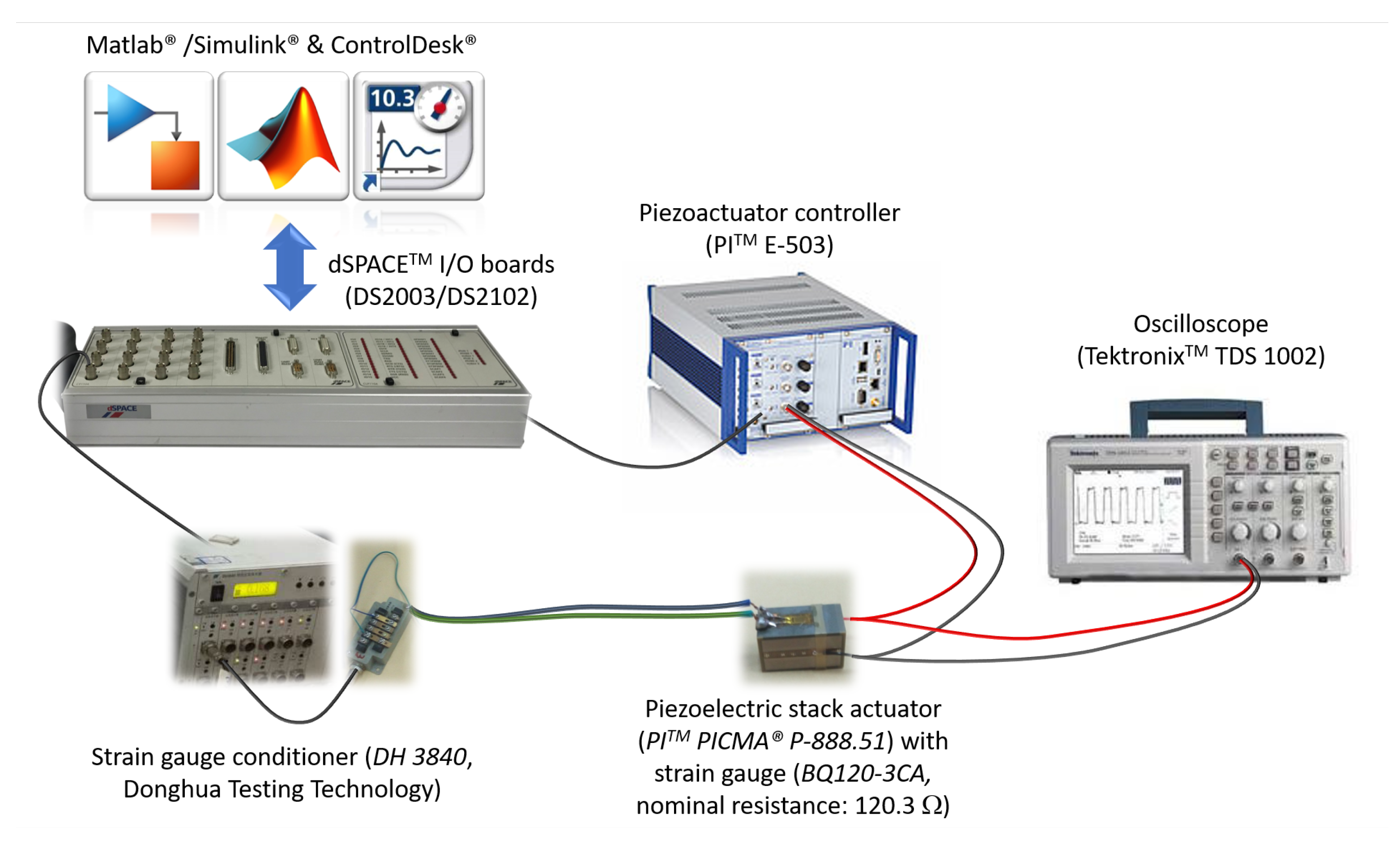
3.1. Set-Up and Model Identification
3.2. Results
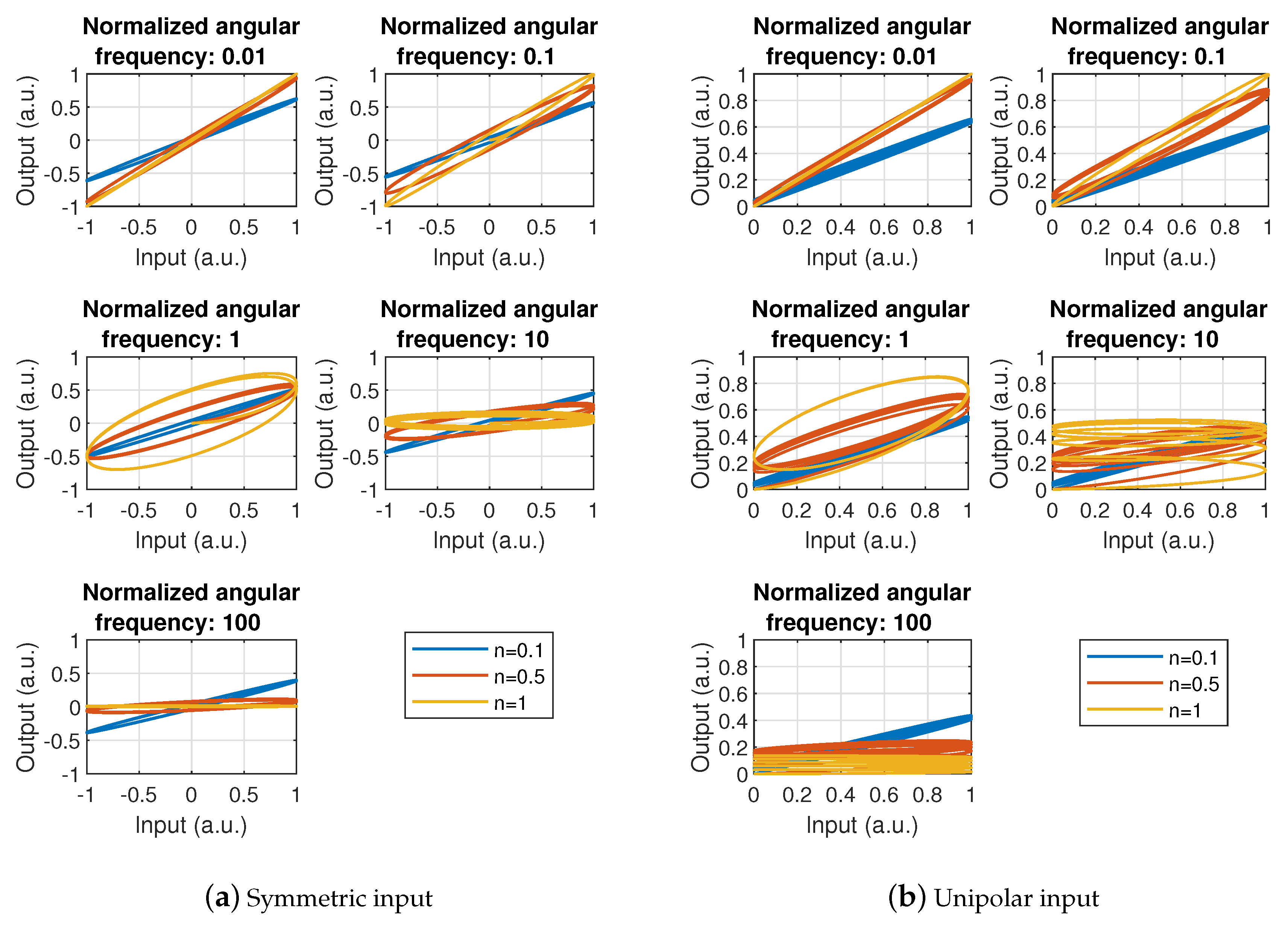
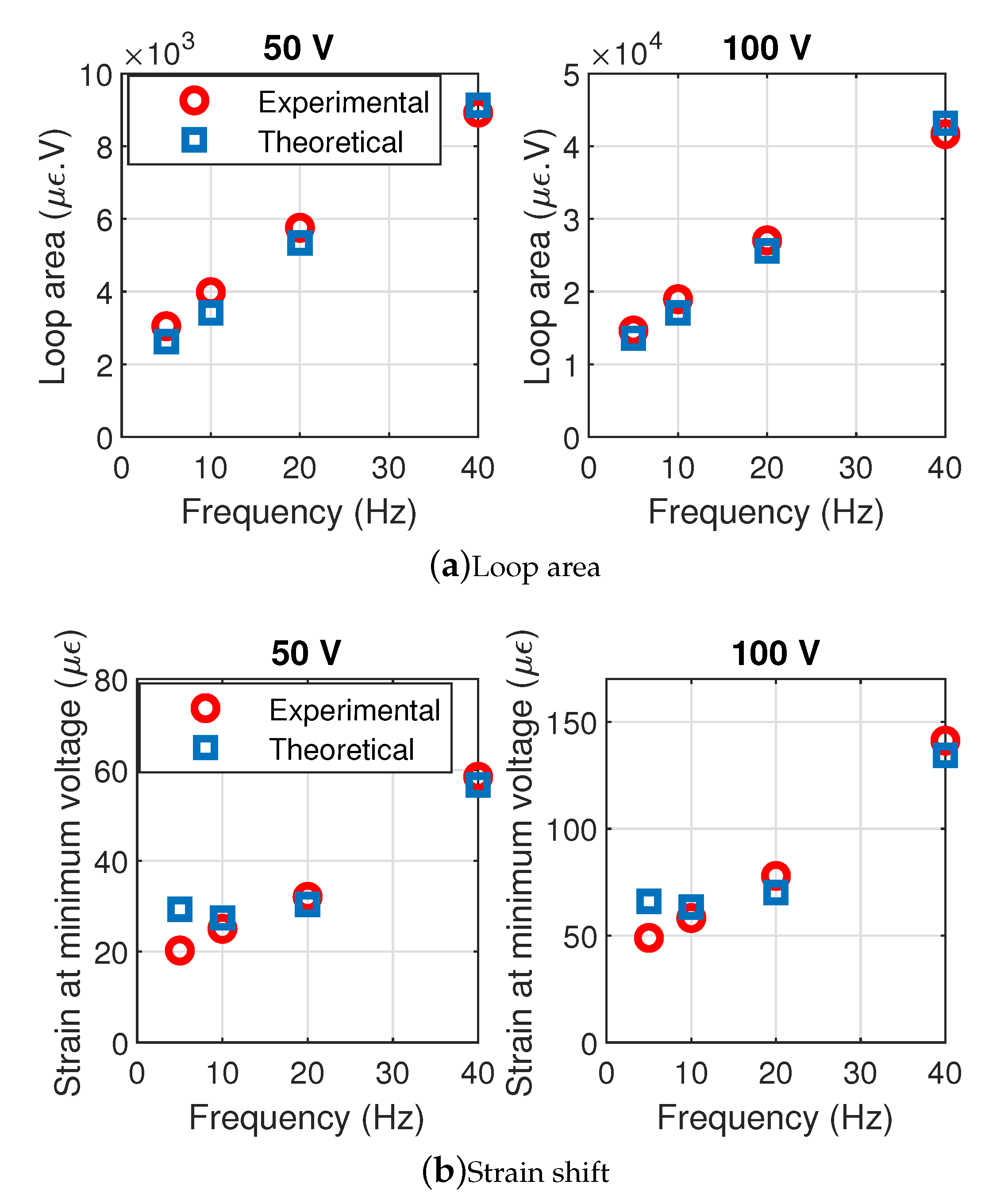
3.2.1. Harmonic Excitation at Different Amplitudes and Frequencies
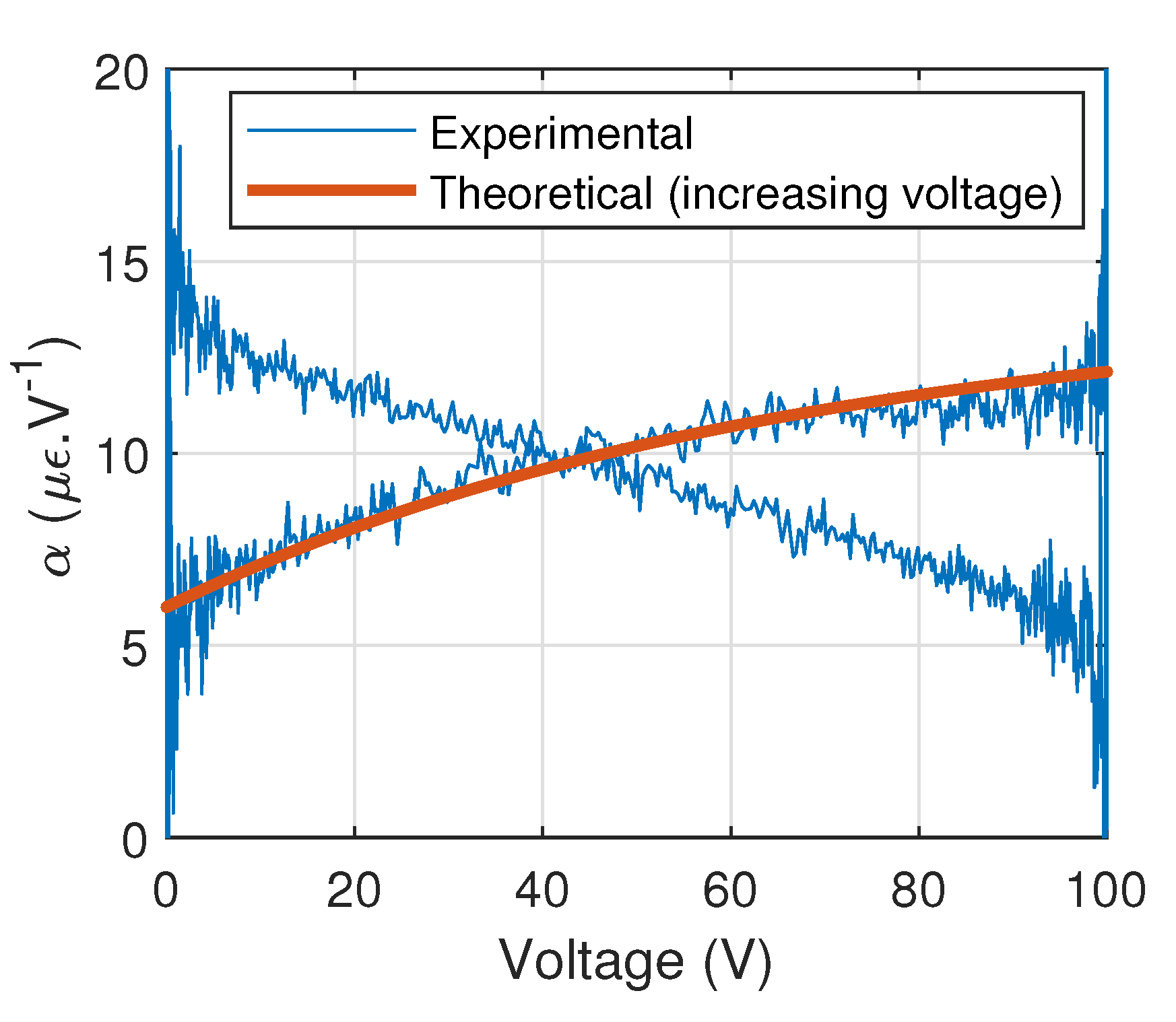
3.2.2. Varying Voltage Magnitude
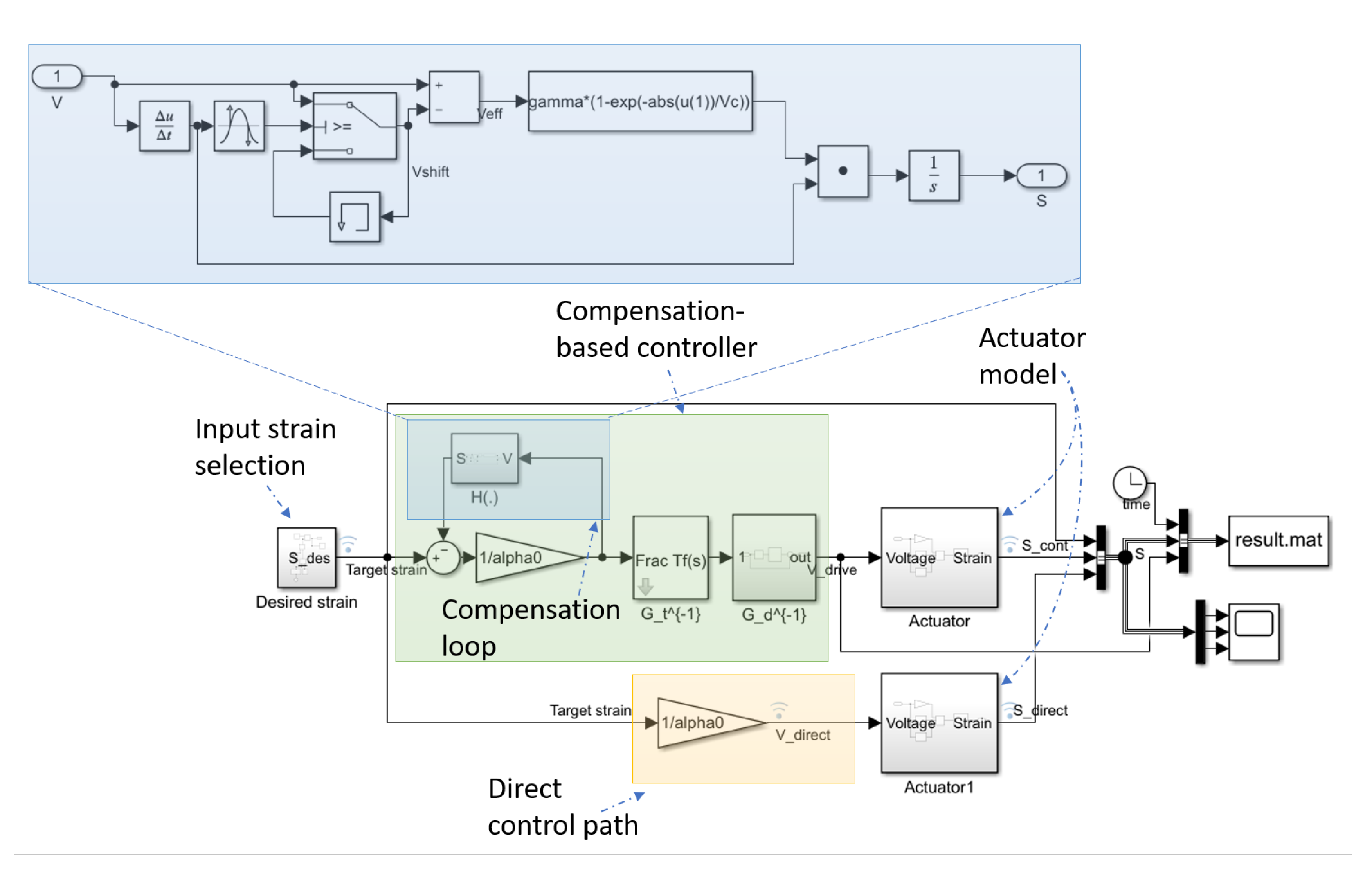
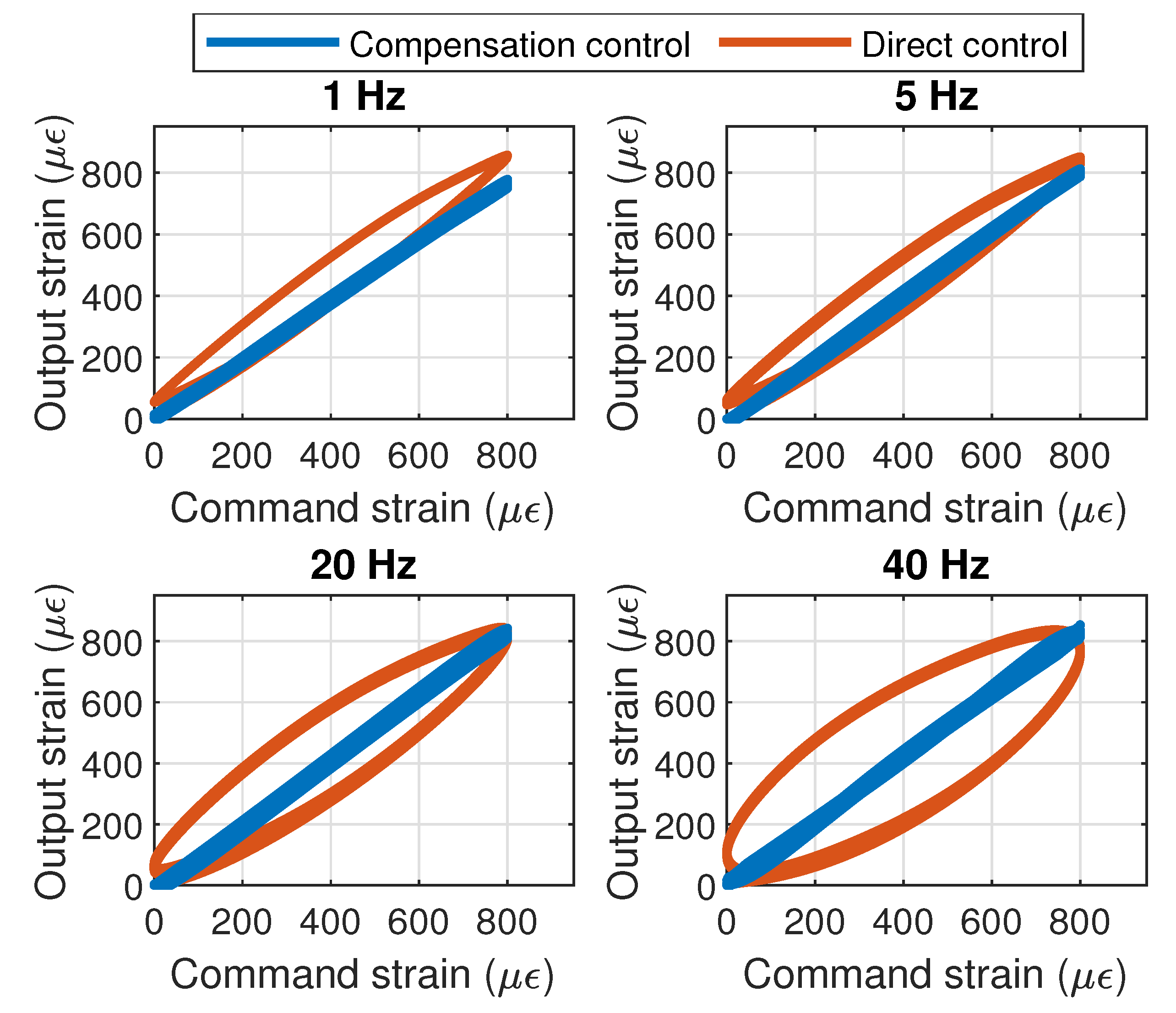
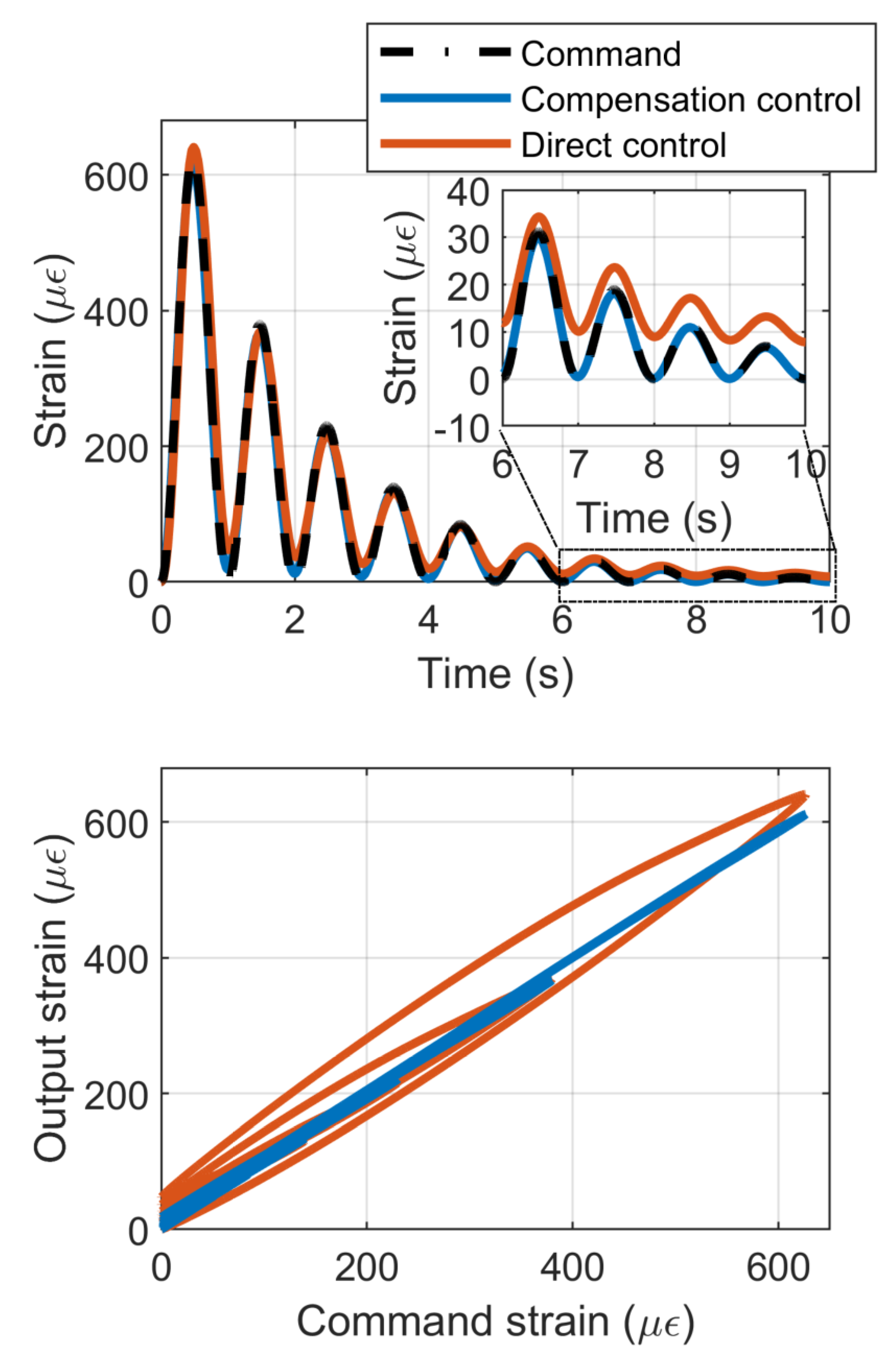
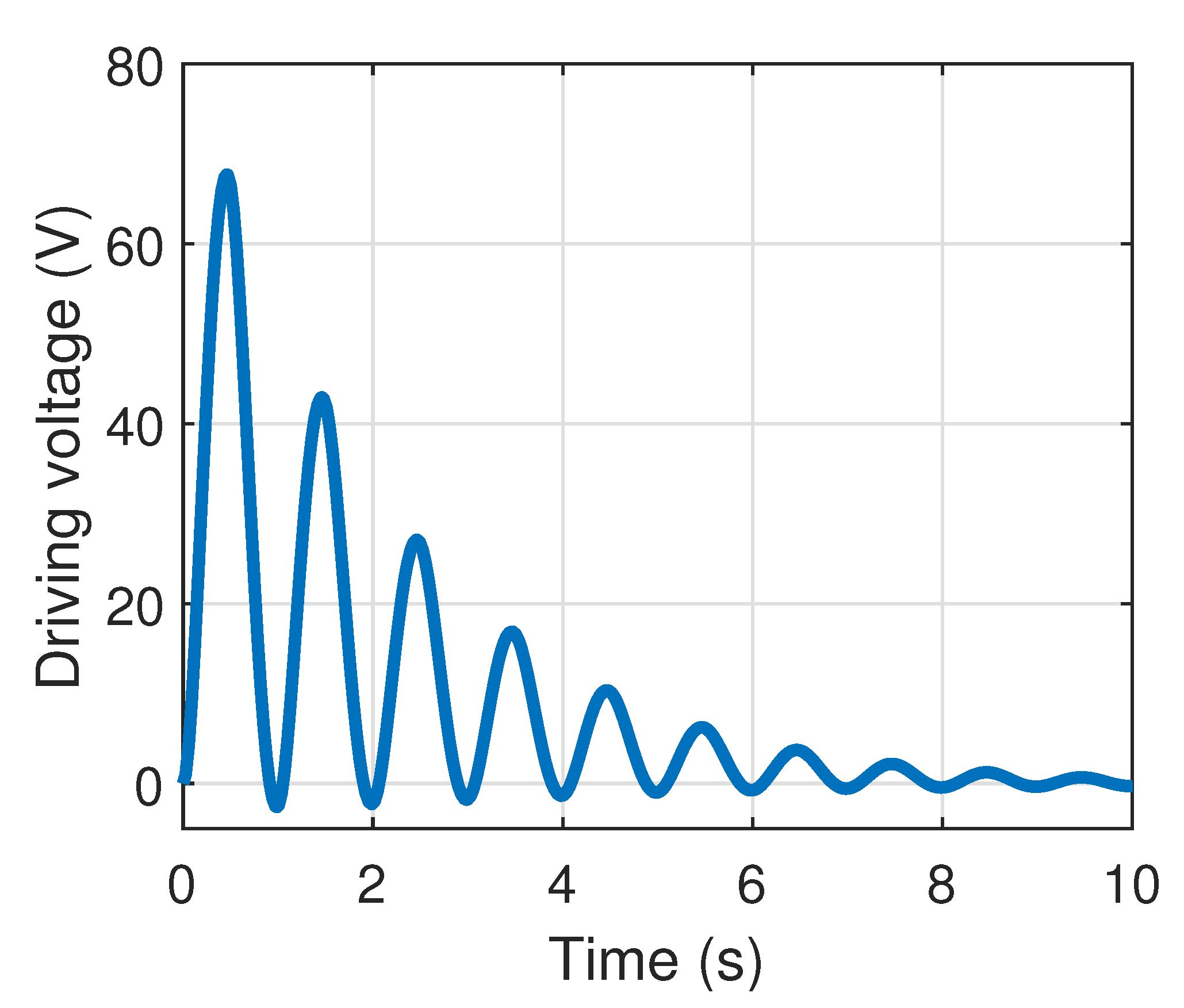
4. Numerical Example: Application to Linearized Control
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lallart, M. (Ed.) Ferroelectrics–Applications; Sciyo/Intech: Rijeka, Croatia, 2011; ISBN 978-953-307-456-6. [Google Scholar]
- Wu, J.; Gao, X.; Chen, J.; Wang, C.-M.; Zhang, S.; Dong, S. Review of high temperature piezoelectric materials, devices, and applications. Acta Phys. Sin. 2018, 67, 207701. [Google Scholar]
- Chorsi, M.T.; Curry, E.J.; Chorsi, H.T.; Das, R.; Baroody, J.; Purohit, P.K.; Ilies, H.; Nguyen, T.D. Piezoelectric Biomaterials for Sensors and Actuators. Adv. Mater. 2019, 31, 1802084. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chiatto, M.; Capuano, F.; Coppola, G.; De Luca, L. LEM Characterization of Synthetic Jet Actuators Driven by Piezoelectric Element: A Review. Sensors 2017, 17, 1216. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hassani, V.; Tjahjowidodo, T.; Do, T.N. A survey on hysteresis modeling, identification and control. Mech. Syst. Sig. Proc. 2014, 49, 209–233. [Google Scholar] [CrossRef]
- Preisach, F. Uber die magnetische nachwirkung. Z. Phys. 1935, 94, 277–302. [Google Scholar] [CrossRef]
- Song, X.; Duggen, L.; Lassen, B.; Mangeot, C. Modeling and identification of hysteresis with modified Preisach model in piezoelectric actuator. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017. [Google Scholar] [CrossRef]
- Krasnosel’Skii, M.A.; Pokrovskii, A.V. Systems with Hysteresis; Springer: Berlin, Germany, 1989. [Google Scholar]
- Qin, Y.; Zhao, X.; Zhou, L. Modeling and Identification of the Rate-Dependent Hysteresis of Piezoelectric Actuator Using a Modified Prandtl-Ishlinskii Model. Micromachines 2017, 8, 114. [Google Scholar] [CrossRef] [Green Version]
- Sebald, G.; Boucher, E.; Guyomar, D. A model based on dry friction for modeling hysteresis in ferroelectric materials. J. Appl. Phys. 2004, 96, 2785–2791. [Google Scholar] [CrossRef]
- Al-Bender, F.; Lampaert, V.; Swevers, J. The generalized Maxwell-slip model: A novel model for friction simulation and compensation. IEEE Trans. Autom. Control 2005, 50, 1883–1887. [Google Scholar] [CrossRef]
- Jiles, D.C.; Atherton, D.L. Theory of the magnetisation process in ferromagnets and its application to the magnetomechanical effect. J. Phys. D Appl. Phys. 1984, 17, 1265–1281. [Google Scholar] [CrossRef]
- Jiles, D.C.; Atherton, D.L. Theory of ferromagnetic hysteresis (invited). J. Phys. D Appl. Phys. 1984, 55, 2115–2120. [Google Scholar] [CrossRef]
- Bouc, R. Forced vibration of mechanical systems with hysteresis. In Proceedings of the Fourth Conference on Nonlinear Oscillation, Prague, Czech Republic, 5–9 September 1967; p. 315. [Google Scholar]
- Wen, Y.K. Method for random vibration of hysteretic systems. J. Eng. Mech. 1976, 102, 249–263. [Google Scholar]
- Duhem, P. Die dauernden aenderungen und die thermodynamik. Z. Phys. Chem. 1897, 22, 543–589. [Google Scholar] [CrossRef]
- Wang, G.; Chen, G. Identification of piezoelectric hysteresis by a novel Duhem model based neural network. Sens. Actuators A Phys. 2017, 264, 282–288. [Google Scholar] [CrossRef]
- Zhu, W.; Rui, X.-T. Hysteresis modeling and displacement control of piezoelectric actuators with the frequency-dependent behavior using a generalized Bouc–Wen model. Precis. Eng. 2016, 43, 299–307. [Google Scholar] [CrossRef]
- Szewczyk, R.; Frydrych, P. Extension of the Jiles–Atherton model for modelling the frequency dependence of magnetic characteristics of amorphous alloy cores for inductive components of electronic devices. Acta Phys. Pol. A 2010, 118, 782–784. [Google Scholar] [CrossRef]
- Ducharne, B.; Guyomar, D.; Sebald, G. Low frequency modelling of hysteresis behaviour and dielectric permittivity in ferroelectric ceramics under electric field. J. Phys. D Appl. Phys. 2007, 40, 551–555. [Google Scholar] [CrossRef]
- Bernard, Y.; Mendes, E.; Bouillault, F. Dynamic hysteresis modeling based on Preisach model. IEEE Trans. Magn. 2002, 38, 885–888. [Google Scholar] [CrossRef]
- Guyomar, D.; Ducharne, B.; Sebald, G. Time fractional derivatives for voltage creep in ferroelectric materials: Theory and experiment. J. Phys. D Appl. Phys. 2008, 41, 3143–3153. [Google Scholar] [CrossRef]
- Ducharne, B.; Zhang, B.; Guyomar, D.; Sebald, G. Fractional derivative operators for modeling piezoceramic polarization behaviors under dynamic mechanical stress excitation. Sens. Actuators A 2013, 189, 74–79. [Google Scholar] [CrossRef]
- Liu, Y.; Shan, J.; Qi, N. Creep modeling and identification for piezoelectric actuators based on fractional-order system. Mechatronics 2013, 23, 840–847. [Google Scholar] [CrossRef]
- Ding, C.; Cao, J.; Chen, Y.Q. Fractional-order model and experimental verification for broadband hysteresis in piezoelectric actuators. Nonlinear Dyn. 2019, 98, 3143–3153. [Google Scholar] [CrossRef]
- Iványi, A. Hysteresis Models in Electromagnetic Computation; Akadémiai Kiadó: Budapest, Hungary, 1997; ISBN 963-05-7416-0. [Google Scholar]
- Lallart, M.; Li, K.; Yang, Z.; Wang, W. System-level modeling of nonlinear hysteretic piezoelectric actuators in quasi-static operations. Mech. Syst. Signal Process. 2019, 116, 985–14996. [Google Scholar] [CrossRef]
- Li, K.; Yang, Z.; Lallart, M.; Zhou, S.; Chen, Y.; Liu, H. Hybrid hysteresis modeling and inverse model compensation of piezoelectric actuators. Smart Mater. Struct. 2019, 28, 115038. [Google Scholar] [CrossRef]
- Lord, R. On the behaviour of iron and steel under the operation of feeble magnetic forces. Philos. Mag. Ser. 1887, 1, 225–248. [Google Scholar]
- Park, J.; Moon, W. Hysteresis compensation of piezoelectric actuators: The modified Rayleigh model. Ultrasonics 2010, 50, 335–339. [Google Scholar] [CrossRef]
- Zhang, M.; Damjanovic, D. A quasi-rayleigh model for modeling hysteresis of piezoelectric actuators. Smart Mater. Struct. 2020, 29, 075012. [Google Scholar] [CrossRef]
- Cole, K.S.; Cole, R.H. Dispersion and Absorption in Dielectrics-I Alternating Current Characteristics. J. Chem. Phys. 1941, 9, 341–352. [Google Scholar] [CrossRef] [Green Version]
- Cole, K.S.; Cole, R.H. Dispersion and Absorption in Dielectrics-II Direct Current Characteristics. J. Chem. Phys. 1942, 10, 98–105. [Google Scholar] [CrossRef]
- Tepljakov, A.; Petlenkov, E.; Belikov, J. FOMCON: A MATLAB toolbox for fractional-order system identification and control. Int. J. Microelectron. Comput. Sci. 2011, 2, 51–62. [Google Scholar]
- Tepljakov, A. FOMCON: Fractional-Order Modeling and Control. 2012. Available online: http://www.fomcon.net/ (accessed on 16 October 2020).
- Petráš, I. Fractional Derivatives, Fractional Integrals, and Fractional Differential Equations in Matlab. In Engineering Education and Research Using MATLAB; Assi, A., Ed.; Intech: London, UK, 2011; pp. 239–264. [Google Scholar]
- PI™ E-503 Piezo Amplifier Module Datasheet. Available online: https://static.piceramic.com/fileadmin/user_upload/physik_instrumente/files/datasheets/E-503-Datasheet.pdf (accessed on 12 August 2020).
- Rakotondrabe, M. Bouc-Wen modeling and inverse multiplicative structure to compensate hysteresis nonlinearity in piezoelectric actuators. IEEE Trans. Autom. Sci. Eng. 2011, 8, 428–431. [Google Scholar] [CrossRef] [Green Version]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values |
|---|---|
| Low voltage strain derivative/voltage derivative coefficient | 8.9 V |
| Pre-exponential factor | 7.8 V |
| Voltage factor | 65 V |
| Transient regime fractional derivative order | 0.15 |
| Transient regime time constant | 15.5 × 10 s |
| Harmonic regime fractional derivative order | 1.35 |
| Harmonic regime time constant | 2 × 10 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lallart, M.; Li, K.; Yang, Z.; Zhou, S. Transient and Harmonic Unipolar Hysteresis Model of Piezoelectric Actuators Using a System-Level Approach. Appl. Sci. 2020, 10, 7268. https://doi.org/10.3390/app10207268
Lallart M, Li K, Yang Z, Zhou S. Transient and Harmonic Unipolar Hysteresis Model of Piezoelectric Actuators Using a System-Level Approach. Applied Sciences. 2020; 10(20):7268. https://doi.org/10.3390/app10207268
Chicago/Turabian StyleLallart, Mickaël, Kui Li, Zhichun Yang, and Shengxi Zhou. 2020. "Transient and Harmonic Unipolar Hysteresis Model of Piezoelectric Actuators Using a System-Level Approach" Applied Sciences 10, no. 20: 7268. https://doi.org/10.3390/app10207268
APA StyleLallart, M., Li, K., Yang, Z., & Zhou, S. (2020). Transient and Harmonic Unipolar Hysteresis Model of Piezoelectric Actuators Using a System-Level Approach. Applied Sciences, 10(20), 7268. https://doi.org/10.3390/app10207268