Intelligent Total Transportation Management System for Future Smart Cities




Abstract
:1. Introduction
2. Materials and Methods
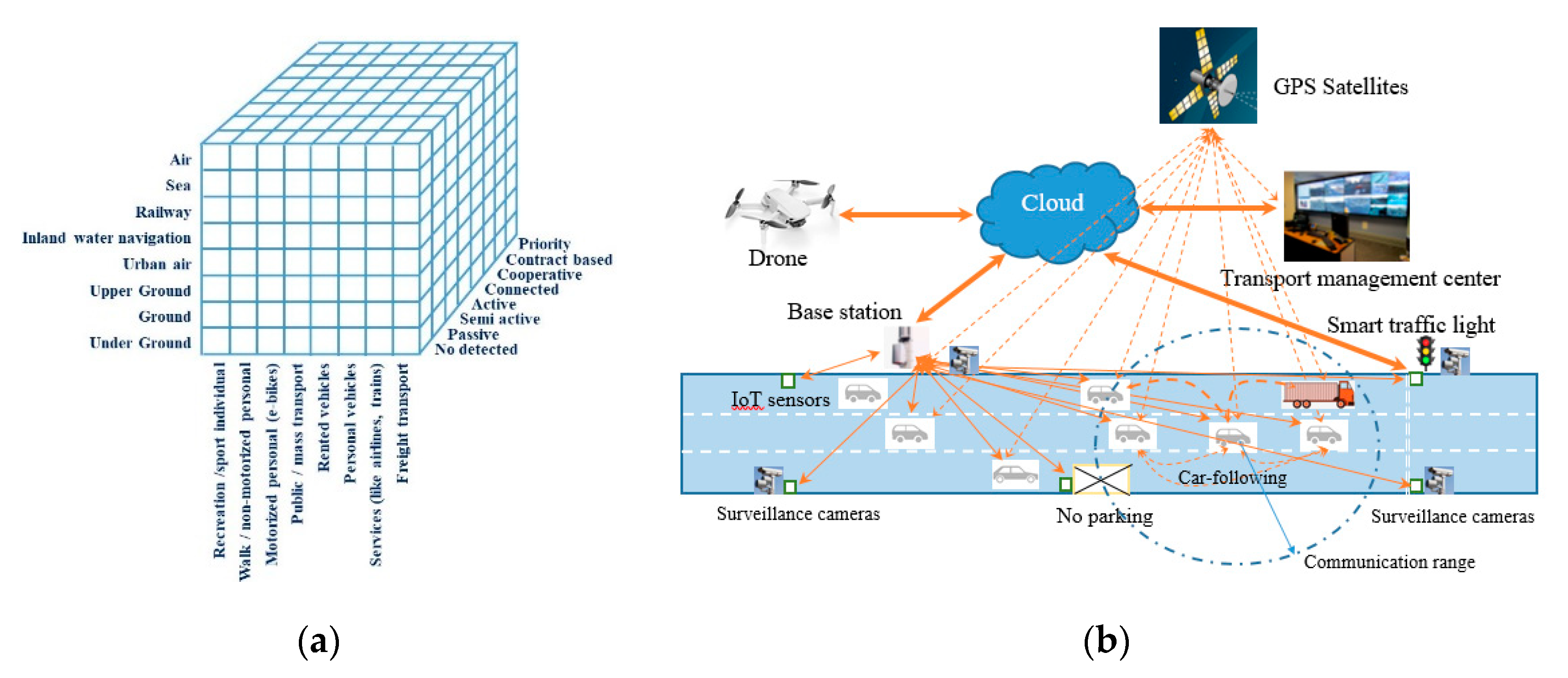
2.1. Systematic Description of the Urban Transportation System
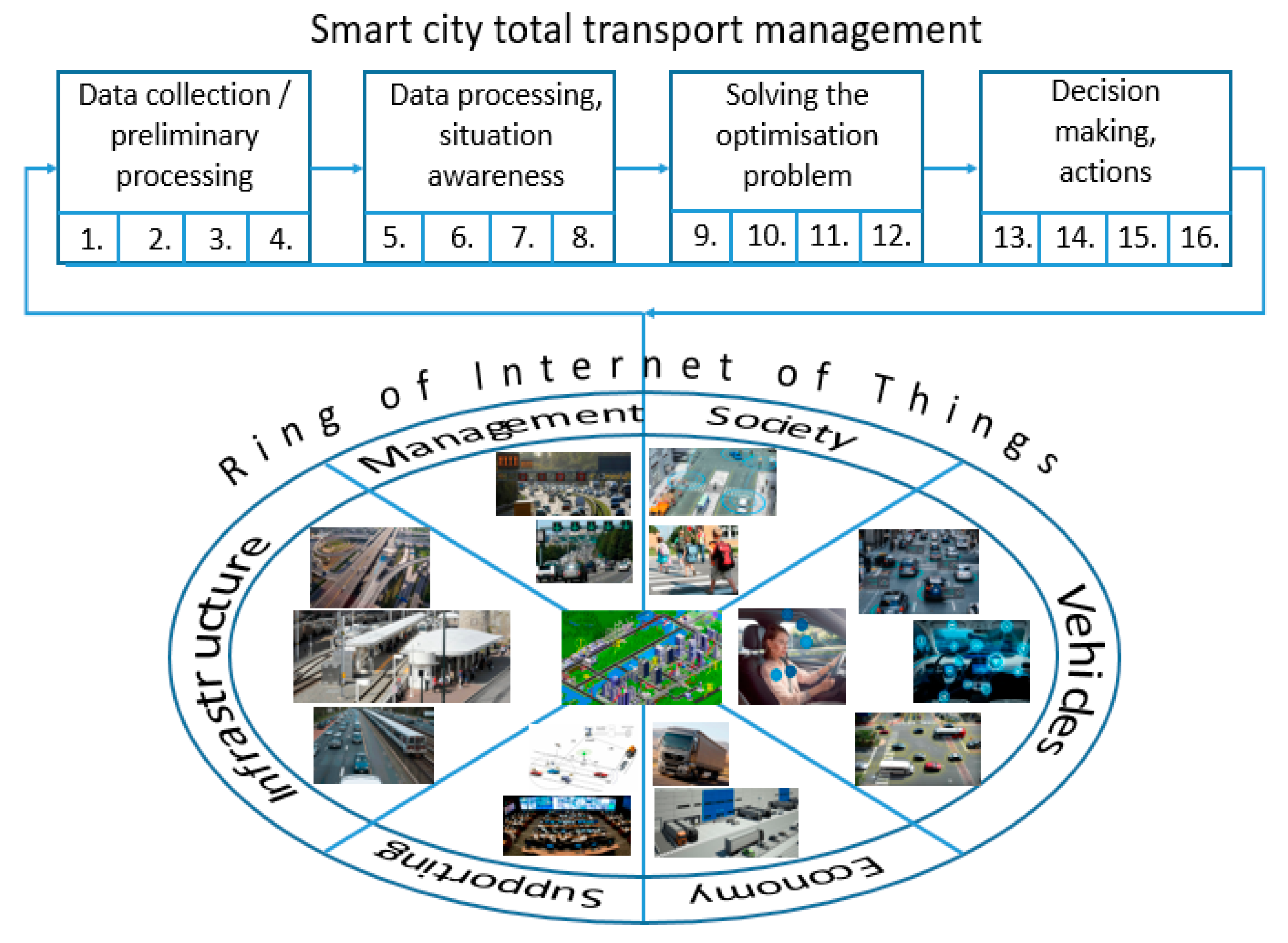
2.2. Hierarchical Approach to Total Transportation Management
- leisure transportation—walking, running, using scooters, bicycling in parks, drafting, yachting, riding hot air balloons, parachuting, using a hang glider, using autogyros caravans, etc.
- private transportation—walking; using scooters; bicycling for traveling; operating personal vehicles, cars, boats, small personal aircraft with well-defined traveling goals
- public transportation or mass transportation—metro, trams, busses, scheduled boats
- business travel—taxi cars, boats, air taxi, business air transport
- freight transportation—lorries, trucks, trailer trucks, container lorries
- product distribution—pick-ups, fast carriers, drones that distribute goods
- special transportation—monitoring by drones, emergency cars, fire cars, police, VIP vehicles
- (i)
- non-detected—objects not appearing on the surveillance screen
- (ii)
- appearing on the surveillance screens, but it is unknown whether they are passive or non-cooperating vehicles or participants like pedestrians—they have no connection with the operation centers, and they might show up on the monitor of surveillance as unknown objects or non-cooperative targets (generally, it might be humans, animals, vehicles not providing information to the operation centers)
- (iii)
- semi-active or simple cooperating—objects/participants in city transportation from which at least some information is available at the operation center. For example, by video, the object is identified as a small or medium car or van
- (iv)
- active or cooperating—vehicles or service providers (city mass transportation company, taxi companies) that report information on the objects/vehicles moving that are operating in the city. The available information should contain data on the type of the vehicle (and of course its performance), its identification number, load, characteristics available in on-board systems, the instantaneous position of the given vehicles (for example by using the GPS positioning data), purpose, and final destination of travel
- (v)
- connecting vehicles—work together passively (using, for example, sonic or radar measurements to keep the following distance) or actively (exchanging all the available data on board) and they may even harmonize their actions (like moving in formation or using the conflict detection and resolution based on the exchanged information)
- (vi)
- contract-based vehicles—may have some preferences in the transportation system (like temporary opening the bus lanes or giving them green lights as possible) served on the basis of first come, first served, and they must pay (low fees) for serving
- (vii)
- priority transport—should have priority lanes/control (as for police, emergency cars, traveling of VIP persons)
- (viii)
- supporting partners—starting by continuous weather forecast reporting up to emergency management organization having the highest priority.
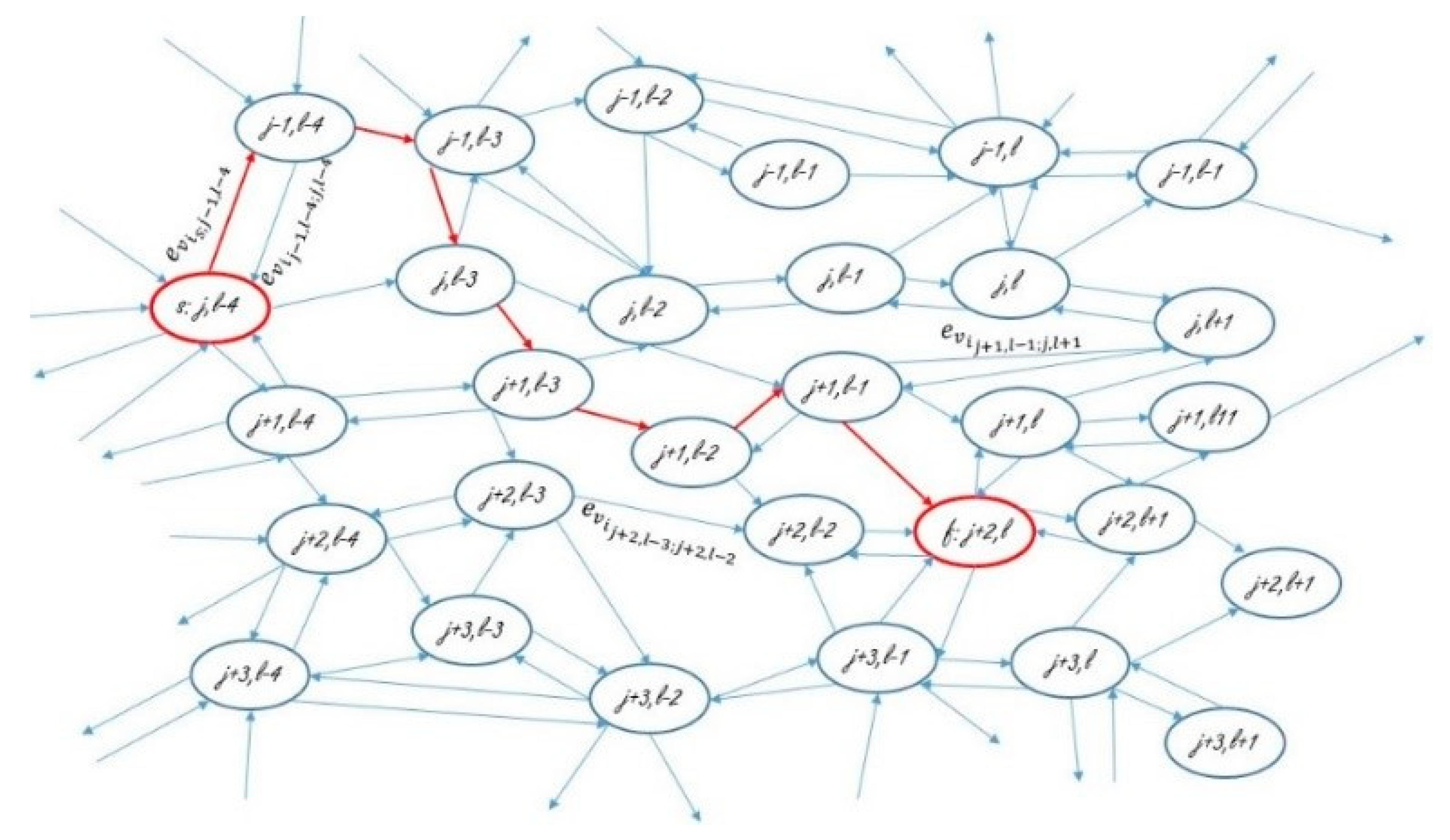
2.3. General Optimization Method
- At first, the objective function is nonlinear. It is enough to underline that the fuel consumption depends on the vehicle’s drag, which is a function of the vehicle velocity square. Furthermore, the fuel consumption depends, e.g., on the number of stops or accelerations, or the duration of rush hours. Fuel consumption of the same types of cars might differ by 50%–80% depending on the drivers (“young dynamic”- or “old lady”-type drivers).
- Next, vehicles’ motion might be started and finished in any local places or at the borders of the investigated city areas. The given i-th vehicle may take part in traffic several times (moving–parking–moving).
- Additionally, the situation may change dynamically because of an accident, tropical rain, or simple traffic conjunction.
- Finally, demand and demand in given transportation means are changing quickly. Transportation networks planned and built based on demand forecast used available data on a given time of social and economic requirements. Therefore, the networks were planned for mass transportation and motorized vehicles. Nowadays, the system is weak in parking and bicycle or scooter lanes. On the other hand, it is good news that the young generation does not prefer to have a car; young people like to use car-sharing systems, and advanced, e-transportation solutions.
- physical levels including all the objects, vehicles, and even stakeholders;
- digital level that transmits the data/information and uses it for multi-directional info-communication; and
- virtual or computational center, which supports the operation center and situation awareness, evaluation, decision making, and realized active dynamic control.
2.4. Sensing and Technologies in Total Transportation Management
- disruptive technologies including new methods of design and production process planning, new optimized transport network planning, new (lightweight) materials (as full composite vehicles), new solutions as (as electric vehicles), new unconventional solutions (as an autonomous vehicle, pilot-less taxi drones);
- micro-electric-mechanical-system (MEMS)-based sensors and actuators, enabling traffic monitoring and active control;
- new info-communication technology based on wireless technology, Internet, cloud, and Internet of Things concepts;
- including further data processing, situation awareness–evaluation–decision making by the methods of soft computing and artificial intelligence; and
- improving the new concept of total transportation/total management.
- vehicle structures and systems;
- operators’ working environment, and more particularly in the drivers’ cockpits and monitoring/control rooms;
- infrastructure of the transportation system; and
- general info-communication systems.
- passive sensors—that do not require own or external power supports (like thermocouple, electric field sensing, piezoelectric sensors, chemical and infrared sensors, or video camera/infrared camera)
- active sensors—sensing devices that require an external source of power to operate (GPS, radar, ultrasonic detectors, Lidar, blood pressure sensors)
- passive system uses signals measured by sensors in case of out of control actions, in quasi-steady operation modes and
- active system applies predefined inputs, trajectories, special loads, or test signals (including, for example, recognition–decision action time for braking or delay in braking, deviation from predefined trajectories as curved lanes).
- passive monitoring of the operational conditions—built in the environment from a distance to the vehicles or the operators, monitored objects, using passive and active sensors like video cameras, signal transmitters, or eye tracking, infrared cameras, microwave radars
- passive monitoring by sensors integrated into the working environment for direct sensing of the operators’ behaviors, such as heart rate; skin resistance; built in the operators’ control elements or their clothes; integrated into the infrastructure as road construction, rail tracks, bridges, or tunnels to measure the size of the vehicles, their weight, or to detect the deformation in the structural elements
- semi-active sensing and monitoring—measuring some characteristics as the reaction of operators on some signals/information, the action of vehicles while passing small obstacles, load, stress and/or deformation of bridges under heavy vehicles
- active monitoring and detection—passive or active sensors that measure the reactions of the vehicles/operators on the specially generated signals (including signals initiated to test the vehicle systems, transportation infrastructure, or operators).
2.5. Data Processing
- passive control—applies data provided by the stakeholders (including historical data and transportation system network capabilities)
- active control—uses the additional information obtained from real traffic measurements (namely passive monitoring, primary surveillance, information available from stakeholders/users like a mobile for positioning)
- dynamic management—uses information from the secondary surveillance (provided by the cooperative and contract-based vehicles, drivers, companies) for passive and active monitoring.
- proactive management—top management that uses the results of predictive simulations (on the possible occurrence of the traffic jam caused by accident, weather changes, demonstrations) as feedforward, or internal model control, as well as using free routes for prioritized vehicles or simulating the vehicle motion in exceptional environmental cases.
- data collection/preliminary data processing:
- i.
- data collection and noise filtration—reducing effects of noise on measurements
- ii.
- primary (preliminary) warning—detecting the crosses of signals in their defined borders on tolerance zones, appearing not prescribed situation (that may result in an error, accident)
- iii.
- data harmonization—conversion of the measured records to comparable forms of data, selecting windows on data series with the same time frames
- iv.
- statistical analysis—assessment of the primary statistical values and trends, while saving them to permit further investigations
- Data processing, situation awareness-simulation-evaluation:
- i.
- automated situation awareness—the perception of the environment with time and space, predicting the state in the near future
- ii.
- study of special situations—situations being out of the normal operational circumstances, like accidents
- iii.
- simulations—using the available simulation software to simulate local event or sub-system operation, or total system
- iv.
- evaluations—study the simulation results, providing inputs for optimization
- Solving the optimization problem:
- i.
- objective function definition—the total system must be optimized for minimum energy consumption (Equations (2)–(4)) or minimum total cost
- ii.
- constraints definition—the constraints might be defined for technical, technological operation, economic, societal, environmental impact, safety, and security aspects (like an actual problem, social distance in mass transport)
- iii.
- optimization problem solution—with linear or non-linear programming or artificial intelligence
- iv.
- result evaluation—check the applicability of the results
- Decision making and actions:
- i.
- automated decision making—it might be applied to the small optimization problems like the control of traffic lights at given cross-sections, and it can be determined as a recommended decision for the total traffic management
- ii.
- decision making for special situations—caused by unwanted events (accident) of planned situations like protests or an essential sports event
- iii.
- decision making for emergency situations—in case of, e.g., a disaster such as a flood, when lifesaving is the primary objective
- iv.
- actions—the realization of the decision
3. Results—Examples of Sub-Model Developments
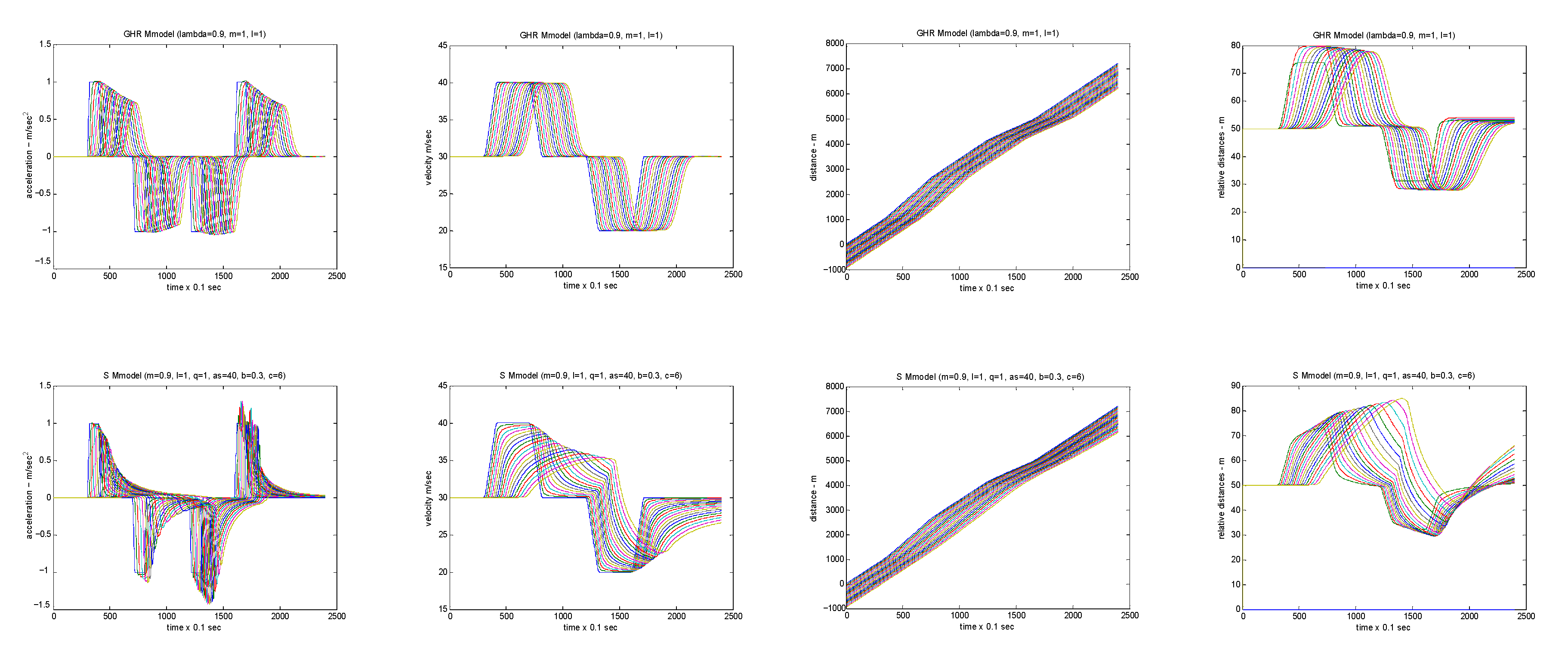
3.1. A New Car-Following Model
- stimulus-response model
- safe distance model
- psychophysical model
- cell-based model (cellular automata model)
- optimum velocity model
- trajectory-based model
3.2. Managing Drones as a Formation to Avoid Obstacles in Smart Cities
3.2.1. Formation Model
3.2.2. Obstacle Avoidance Model
3.2.3. Formation Control Strategy
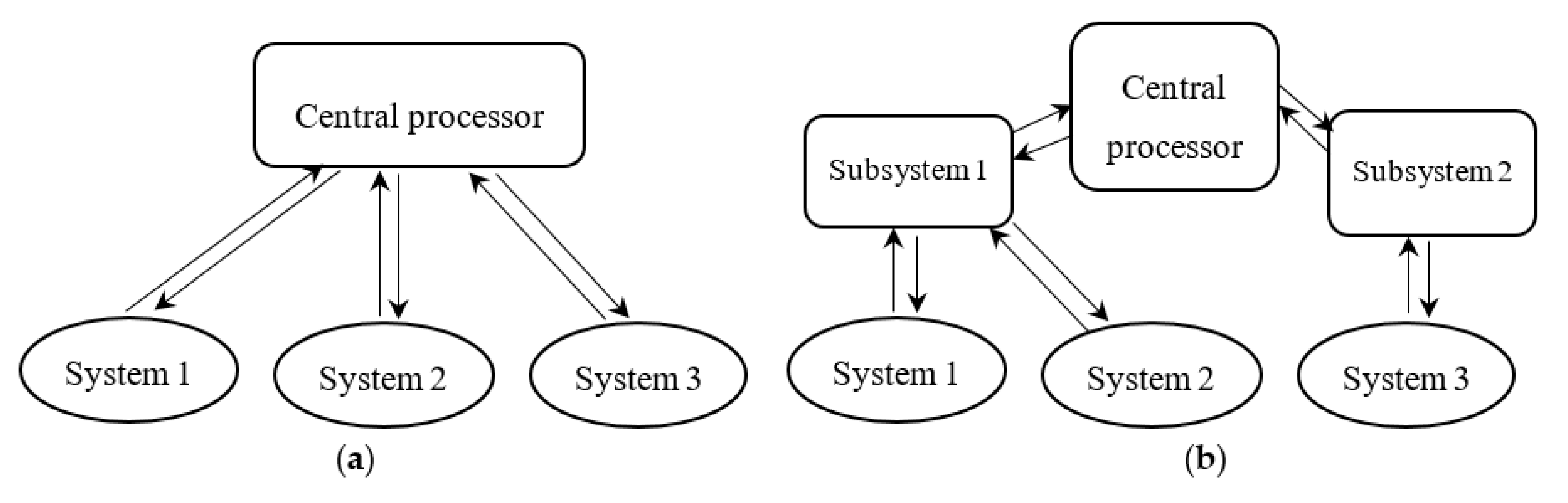
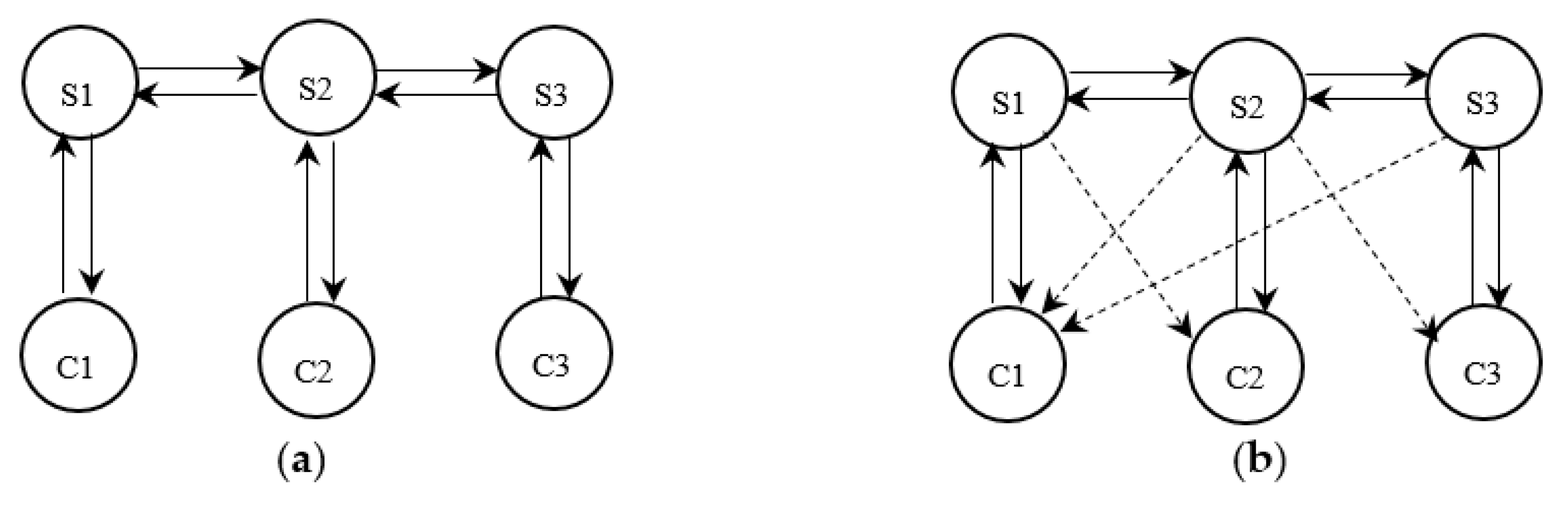
- The Centralized Control Strategy
- 2.
- Decentralized Control Strategy
- 3.
- Distributed Control Strategy
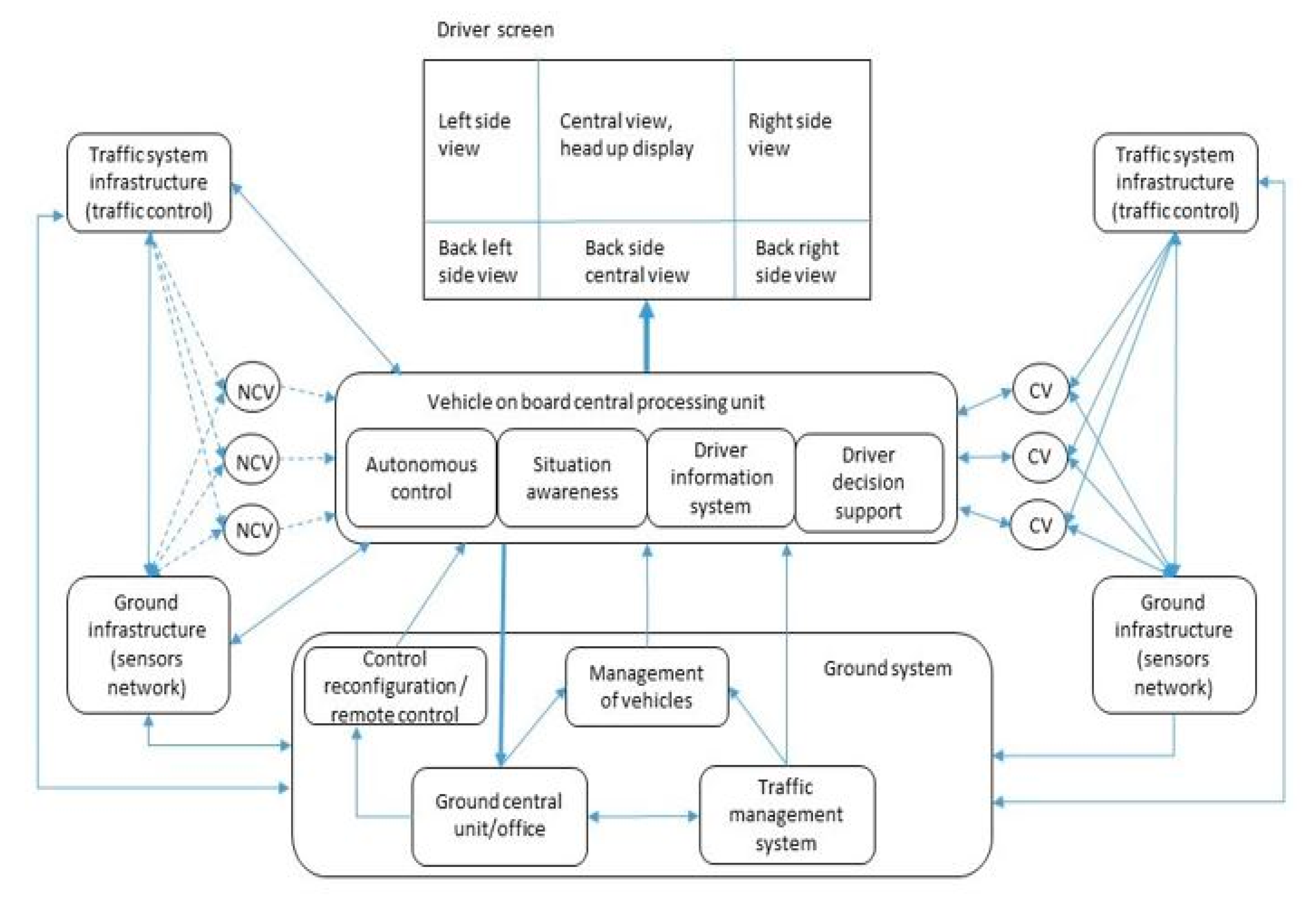
3.3. Intelligent Total Transportation Managing System in Smart Cities
3.3.1. Management of Non-Cooperating Vehicles
3.3.2. Management of the Cooperating Vehicles
3.3.3. Contract-Based Traffic Management
3.3.4. Priority Transport Management
4. Discussion on the Possible Use and Preliminary Evaluation of the Concept
4.1. Applicability of the Concept
4.2. Concept Comparative Evaluation
- first generation—with minimal data from individual vehicles, interactions of infrastructure and vehicles through the traffic rules, control signals, and management based on empirical models
- second generation—early intelligent transportation system with some vehicles providing data; maintaining a balance between the supply and demand, using dynamic models and management
- third generation—rich data exchange, mixed human and automated driving, active management
- fourth generation—application of wireless technology with full monitoring and active communication between the infrastructure, vehicles, operation center, cloud computing, IoT, and pro-active management
- transportation with serious limitations—existing in old cities or in cities with large historical centers that generate significant limitations on the transportation systems
- transportation with passive management—using traffic rules and traffic signals, only, including safe bus lanes, lanes for bicycles; this is a traditional transportation system
- transportation with semi-dynamic management—implementing dynamic management (as control of the traffic signals depending on real traffic, use of green lane concept, mass traffic control depending on the real passenger demand, changing in traffic direction depending on the traffic intensity, providing free routes for emergency transportation) in dedicated regions of the city; such a system uses remote sensing (like video, sensors being integrated into the infrastructure) and real-time data processing
- transportation with dynamic and/or semi-active management—at least partly is supported by a transportation system operational center using cloud computing; IoT; dynamic or active control of motion of semi-cooperating, connected, and cooperating vehicles (starting from simple smart parking up to active control on lane directions, multimodal transport hubs, district total transportation)
- transportation with active management (and partly intelligent)—requires harmonization with the city operation center
- intelligent total transportation management—as described above
4.3. Action Made in Concept Implementation
- The proposed system uses the vast distributed network of sensors for surveillance and recognition of the non-cooperating, cooperating, contract-based, and priority transport vehicles, including three layers: physical, info-communication, and control generation.
- The ICT concept was analyzed and developed based on the wireless network as distributed sensors and actuators and the Internet as IoT, which integrated into vehicles, infrastructure, individual vehicles, and a conventional single control system.
- The control layer was a hierarchically organized software set, which was used to recognize and classify vehicles, traffic situation awareness, conflict detection, and resolution, including the sense and avoidance of obstacles, other vehicles, and people.
- The proposed system allowed us to optimize the total traffic depending on various objectives ranging from effective energy use to environmental impact minimization.
- The drone-following models are based on the principle that they keep a safe distance based on relative velocity.
- Another developed model, called the Markov drone-following model, is based on the approximation with the stochastic diffusion process of speed decision.
- The numerical simulation results demonstrated that the safe distance between drones is maintained; there was no accident in the traffic flow.
- This approach can be applied to dense traffic flow. Additionally, the first model can be useful for studies of local stability.
- Urban transportation was classified depending on the transportation means and management techniques being applied. Such a system includes users, operators, service providers, transportation management, infrastructure, nature/built environment, regulations, competence and knowledge centers, supporting sub-systems, and passive and active interactions with other essential systems.
- Obstacles were modeled as cylinders used in the collision avoidance process in the path planning of drone formation operating in smart cities.
- A methodology to determine and calculate UAVs’ (unmanned aerial vehicles) landing stages was developed and investigated.
- A cube of a transportation system was introduced and used to identify the urban total transportation system’s classification.
- A method to optimize the total transportation impact was developed, which can be applied to optimize the energy used by the vehicles over their routes.
- it deals with transportation as a single and total system (including the legacy control, vehicles, infrastructure, connecting supply chains),
- it is multi-layered (dealing separately with the cooperative, prioritized vehicles), and
- it introduces new solutions (on the system level as active/proactive control and the sub-system levels like smart parking, harmonization of the transportation means on the use of short-term prediction based on transportation monitoring).
5. Conclusions
- constraints supporting the solving of the optimization problem (1) even in the case of using a simple and understandable constraint such as a door-door speed for moderate traveling distance, the constraint depends, e.g., on the size of the city, social habits, economic developments. Thus, the constraints must be adapted to the given system
- system composition—the ratio of non-cooperative vehicles, a lack of sensing sub-system, and insufficiency in supporting systems like energy support or the information on parking vehicles
- acceptance by the stakeholders—legal control, acceptance of high-level automation, acceptance of control and commands from the operational centers, and acceptance of operating conditions like the delivery of product to shops at night time
- requirements in further developments—as possible dynamic optimization depending on the real transportation, size, intensity, and disasters or developing a special artificial intelligent classification of the non-cooperative vehicles
Author Contributions
Funding
Conflicts of Interest
References
- Nayfeh, M.H. Fundamentals and Applications of Nano Silicon in Plasmonics and Fullerines, Current and Future Trends; Micro and Nano Technologies Series; Elsevier: Amsterdam, The Netherlands, 2018; p. 586. ISBN 978-0-323-48057-4. [Google Scholar]
- Daniel, K. Personal Computer History: 1975–1984, at Welcoome to Low End Mac. Available online: https://lowendmac.com/2014/personal-computer-history-the-first-25-years/#:~:text=Personal%20computer%20history%20doesn’t,IMSAI%208080%2C%20an%20Altair%20clone.&text=Both%20used%20the%20Intel%208080%20CPU (accessed on 22 May 2020).
- Szondy, D. Apollo’s Brain: The Computer that Guided Man to the Moon, New Atlas. Available online: https://newatlas.com/apollo-11-guidance-computer/59766/ (accessed on 22 May 2020).
- Wikipedia: History of Internet. Available online: https://en.wikipedia.org/wiki/History_of_the_Internet (accessed on 22 May 2020).
- Mukhopadhyay, S.C.; Suryadevara, N.K. Internet of Things: Challenges and Opportunities. In Internet of Things: Challenges and Opportunities; Springer, series: Smart Sensors, Measurement and Instrumentation 9; Mukhopadhyay, S.C., Ed.; Springer: Berlin/Heidelberg, Germany, 2014; pp. 1–18. ISBN 978-3-319-04222-0. [Google Scholar] [CrossRef]
- Li, S.; Xu, L.D.; Zhao, S. The Internet of Things: A Survey, Information Systems Frontiers; Springer: Berlin, Germany, 2015; Volume 17, pp. 243–259. [Google Scholar] [CrossRef]
- Aлымов, B.T.; Tарасова, H.П. Tехногенный Риск. Aнализ и Оценка, Mockba, ИКЦ “Aкадемкнига”, 2006-118 с. Available online: https://www.elibrary.ru/item.asp?id=29878837 (accessed on 14 December 2020).
- Kinzhikeyev, S. Modeling and Management for Supporting the Recovery of Railway Systems after Earthquakes. Ph.D. Thesis, Budapest University of Technology and Economics, Budapest, Hungary, 2020. [Google Scholar]
- Колотвин, A.B.; Зинюхин, Г.Б. Модель городских экосистем. Bестник Оренбургского Государственного Университета 2003, 7, 164–167. [Google Scholar]
- Anthopoulos, L.G. Understanding Smart Cities: A Tool for Smart Government or an Industrial Trick? Springer International Publishing: Cham, Switzerland, 2017; Volume 22. [Google Scholar]
- Lefèvre, B.; Mainguy, G. Urban Transport Energy Consumption: Determinants and Strategies for its Reduction. In An analysis of the literature. Surveys and Perspectives Integrating Environment and Society (SAPIENS); OpenEdition: Vilnius, Lithuania, 2009; Volume 2, p. 3. [Google Scholar]
- Eremia, M.; Toma, L.; Sanduleac, M. The smart city concept in the 21st century, 10th International conference Interdisciplinary engineering, INTER-RNG 2016. Procedia Eng. 2017, 181, 12–19. [Google Scholar] [CrossRef]
- Albino, V.; Berardi, U.; Dangelico, R.M. Smart cities: Definitions, dimensions, performance, and initiatives. J. Urban Technol. 2015, 22, 3–21. [Google Scholar] [CrossRef]
- Christine, W. Energy, Transport and Environment Statistics, 2019 Edition; Statistical Book; Publications Office of the European Union: Eurostat, Luxembourg, 2019; p. 24. [Google Scholar]
- Nikitas, A.; Kougias, I.; Alyavina, E.; Njoya Tchouamou, E. How can autonomous and connected vehicles, electromobility, BRT, hyperloop, shared use mobility and mobility-as-a-service shape transport futures for the context of smart cities? Urban Sci. 2017, 1, 36. [Google Scholar] [CrossRef] [Green Version]
- Nikitas, A.; Michalakopoulou, K.; Njoya, E.T.; Karampatzakis, D. Artificial intelligence, transport and the smart city: Definitions and dimensions of a new mobility era. Sustainability 2020, 12, 2789. [Google Scholar] [CrossRef] [Green Version]
- European Commission. IDEA-E-Investigation and development of the disruptive technologies for e-mobility and their integration into the engineering education, Hungarian national project supported by the Human Resource Development Operative Programme (EFOP), Contract number: EFOP-3.6.1-16-2016-00014. In Human Resources Development Operational Programme; European Commission: Budapest, Hungry, 2016. [Google Scholar]
- Nguyen, D.D.; Rohacs, J. Smart city total transport-managing system: (a vision including the cooperating, contract-based and priority). In Lecture Notes of the Institute for Computer Sciences, Social-Informatics and Telecommunications Engineering; Springer: Cham, Switzerland, 2019; Volume 257, pp. 74–85. [Google Scholar] [CrossRef]
- Nguyen, D.D.; Rohacs, J.; Rohacs, D. Total transport management. In Total transport Management in Smart Cities; Rohacs, J., Kale, U., Eds.; Budapest University of Technology and Economics: Budapest, Hungary, 2020; pp. 37–51. [Google Scholar]
- Kurauchi, F.; Schmöcker, J.D. (Eds.) Public Transport Planning with Smart Card Data; CRC Press Taylor and Francis Group: Boka Raton, FL, USA, 2017; p. 281. [Google Scholar]
- Zanella, A.; Bui, N.; Castellani, A.; Vangelista, L.; Zorzi, M. Internet of Things for Smart Cities. IEEE Internet Things J. 2014, 1, 22–32. [Google Scholar] [CrossRef]
- Cohen, B. (2015) The 3 Generation of Smart Cities, Inside the Development of the Technology Driven City. Available online: http://www.fastcoexist.com/3047795/the-3-generations-of-smart-cities (accessed on 5 March 2020).
- Smart Santander, EU Supported FP7-ICT Project, 2010–2013. Available online: https://cordis.europa.eu/project/id/257992/results (accessed on 20 May 2020).
- Hernández-Muñoz, J.M.; Muñoz, L. The SmartSantander Project. In The Future Internet Assembly. FIA 2013. Lecture Notes in Computer Science; Galis, A., Gavras, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef] [Green Version]
- Gutiérrez, V.; Jose, A.G.; Luis, S.; Luis, M.; Jose, M.; Joao, F.; Mirko, P. SmartSantander: Internet of Things Research and Innovation through Citizen Participation. In The Future Internet assembly. FIA 2013. Lecture Notes in Computer Science; Galis, A., Gavras, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; Volume 7858, pp. 173–186. [Google Scholar] [CrossRef] [Green Version]
- Park, E.; Del Pobil, A.P.; Kwon, S.J. The Role of Internet of Things (IoT) in Smart Cities: Technology Roadmap-oriented Approaches. Sustainability 2018, 10, 1388. [Google Scholar] [CrossRef] [Green Version]
- Rob, D.; Stephen, W. Smart Cities: How Rapid Advances in Technology are Reshaping Our Economy and Society, Deloitte The Netherlands. 2015, p. 86. Available online: https://www2.deloitte.com/content/dam/Deloitte/tr/Documents/public-sector/deloitte-nl-ps-smart-cities-report.pdf (accessed on 20 May 2020).
- Sutar, S.H.; Koul, R.; Suryavanshi, R. Integration of Smart Phone and IOT for development of smart public transportation system. In Proceedings of the 2016 International Conference on Internet of Things and Applications (IOTA). IEEE, Pune, India, 22–24 January 2016; pp. 73–78. [Google Scholar] [CrossRef]
- Cao, Z.; Jiang, S.; Zhang, J.; Guo, H. A unified framework for vehicle rerouting and traffic light control to reduce traffic congestion. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1958–1973. [Google Scholar] [CrossRef]
- Cao, Z.; Guo, H.; Song, W.; Gao, K.; Kang, L.; Zhang, X.; Wu, Q. Improving the Performance of Transportation Networks: A Semi-Centralized Pricing Approach. IEEE Trans. Intell. Transp. Syst. 2020. [Google Scholar] [CrossRef]
- Cao, Z.; Guo, H.; Song, W.; Gao, K.; Chen, Z.; Zhang, L.; Zhang, X. Using Reinforcement Learning to Minimize the Probability of Delay Occurrence in Transportation. IEEE Trans. Veh. Technol. 2020, 69, 2424–2436. [Google Scholar] [CrossRef]
- Cao, Z.; Guo, H.; Zhang, J.; Fastenrath, U. Multiagent-based route guidance for increasing the chance of arrival on time. In Proceedings of the Thirtieth AAAI Conference on Artificial Intelligence, Phoenix, AZ, USA, 12–17 February 2016. [Google Scholar]
- Toh, C.K.; Sanguesa, J.A.; Cano, J.C.; Martinez, F.J. Advances in smart roads for future smart cities. Proc. Math. Phys. Eng. Sci. 2020, 476, 20190439. [Google Scholar] [CrossRef] [PubMed]
- Luque-Vega, L.F.; Michel-Torres, D.A.; Lopez-Neri, E.; Carlos-Mancilla, M.A.; Gonzalez-Jimenez, L.E. IoT Smart Parking System Based on the Visual-Aided Smart Vehicle Presence Sensor: SPIN-V. Sensors 2020, 20, 1467. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lin, T.; Rivano, H.; Le Mouël, F. A survey of smart parking solutions. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3229–3253. [Google Scholar] [CrossRef] [Green Version]
- Xie, K.; Yang, D.; Ozbay, K.; Yang, H. Use of real-world connected vehicle data in identifying high-risk locations based on a new surrogate safety measure. Accid. Anal. Prev. 2019, 125, 311–319. [Google Scholar] [CrossRef]
- Sobral, T.; Galvao, T.; Borges, J. Visualization of Urban Mobility Data from Intelligent Transportation Systems. Sensors 2019, 19, 332. [Google Scholar] [CrossRef] [Green Version]
- Ipsen, K.L.; Zimmermann, R.K.; Nielsen, P.S.; Birkved, M. Environmental assessment of Smart City Solutions using a coupled urban metabolism—Life cycle impact assessment approach. Int. J. Life Cycle Assess. 2019, 24, 1239–1253. [Google Scholar] [CrossRef] [Green Version]
- Rohacs, J.; Rohacs, D. Total Impact Evaluation of Transportation Systems. Transport 2020, 35, 193–202. [Google Scholar] [CrossRef]
- Cao, Z.; Guo, H.; Zhang, J.; Niyato, D.; Fastenrath, U. Finding the shortest path in stochastic vehicle routing: A cardinality minimization approach. IEEE Trans. Intell. Transp. Syst. 2015, 17, 1688–1702. [Google Scholar] [CrossRef]
- Cao, Z.; Guo, H.; Zhang, J.; Niyato, D.; Fastenrath, U. Improving the efficiency of stochastic vehicle routing: A partial lagrange multiplier method. IEEE Trans. Veh. Technol. 2015, 65, 3993–4005. [Google Scholar] [CrossRef]
- Muñoz-Villamizar, A.; Montoya-Torres, J.R.; Faulin, J. Impact of the use of electric vehicles in collaborative urban transport networks: A case study. Transp. Res. Part D Transp. Environ. 2017, 50, 40–54. [Google Scholar] [CrossRef]
- Batty, M.; Axhausen, K.; Fosca, G.; Pozdnoukhov, A.; Bazzani, A.; Wachowicz, M.; Ouzounis, G.; Portugali, Y. Smart city of the future. Eur. Phys. J. Spec. Top. 2012, 214, 481–518. [Google Scholar] [CrossRef] [Green Version]
- US DoD. C4ISR Architecture Working Group (AWG). C4ISR Architecture Framework; Wiley Online Library: Washington, DC, USA, 1997. [Google Scholar]
- Schreiner, C. International Case Studies of Smart Cities: Rio de Janeiro, Brazil; Inter-American Development Bank: Washington, DC, USA, 2016. [Google Scholar]
- Chester, M.V.; Horvath, A. Environmental assessment of passenger transportation should include infrastructure and supply chains. Environ. Res. Lett. 2009, 4, 024008. [Google Scholar] [CrossRef]
- Wangai, A.; Kale, U.; Kinzhikeyev, S. An application of impact calculation method in transportation. Transport 2020, 35, 435–446. [Google Scholar] [CrossRef]
- Georgiu, L.; Harper, C.J.; Keenan, M.; Miles, I.; Popper, R. The Handbook of Technology Foresight: Concept and Practice; Edward Elgar Publishing Ltd.: Northampton, MA, USA, 2008. [Google Scholar]
- Ajdys, J.; Nazarko, J.; Nazarko, L.; Halicka, K. Foresight application for transport sector chapter No. 17. In Clean Mobility and Intelligent Transport Systems, October 2015; Fiorini, M., Lin, J.-C., Eds.; IET: London, UK, 2015; pp. 374–400. ISBN 978-1-84919-895-0. [Google Scholar]
- Baig, Z.A.; Szewczyk, P.; Valli, C.; Rabadia, P.; Hannay, P.; Chernyshev, M.; Johnstone, M.; Kerai, P.; Ibrahim, A.; Sansurooah, K.; et al. Future challenges for smart cities: Cyber-security and digital forensics. Digit. Investig. 2017, 22, 3–13. [Google Scholar] [CrossRef]
- Sumalee, A.; Ho, H.W. Smarter and more connected: Future intelligent transportation system, International Association of Traffic and Safety Sciences. IATSS Res. Elsevier 2018, 42, 67–71. [Google Scholar] [CrossRef]
- Fraden, J. Handbook of Modern Sensors Physics, Designs, and Applications; Springer: Berlin, Germany, 2016; p. 758. [Google Scholar] [CrossRef]
- Estrela, P.; Bhalla, N.; Jolly, P.; Formisano, N.; Estrela, P. Introduction to biosensors. Essays Biochem. 2016, 60, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Bansal, S.; Kumar, D. IoT Ecosystem: A Survey on Devices, Gateways, Operating Systems, Middleware and Communication. Int. J. Wirel. Inf. Netw. 2020, 27, 340–364. [Google Scholar] [CrossRef]
- Khayyam, H.; Javadi, B.; Jalili, M.; Jazar, R.N. Artificial Intelligence and Internet of Things for Autonomous Vehicles. In Nonlinear Approaches in Engineering Applications; Springer: Cham, Switzerland, 2020; pp. 39–68. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, X.; Tarko, A. Modeling car-following behavior on urban expressways in Shanghai: A naturalistic driving study. Transp. Res. Part C Emerg. Technol. 2018, 93, 425–445. [Google Scholar] [CrossRef] [Green Version]
- Bécsi, T.; Aradi, S.; Fehér, Á.; Szalay, J.; Gáspár, P. Highway Environment Model for Reinforcement Learning. IFAC-PapersOnLine 2018, 51, 429–434. [Google Scholar] [CrossRef]
- Bieker-Waltz, L.; Behrisch, M.; Junghaus, M.; Gimm, K. Evaluation of car-following-models at controlled intersections. Eur. Simul. Model. Conf. 2017, 31, 247–251. [Google Scholar]
- Reuschel, A. Vehicle Movements in a Platoon with Uniform Acceleration or Deceleration of the Lead Vehicle. Z. Des Oesterreichischen Ing.-und Archit. Ver. 1950, 95, 50–62. [Google Scholar]
- Pipes, L.A. An Operational Analysis of Traffic Dynamics. J. Appl. Phys. 1953, 24, 274–287. [Google Scholar] [CrossRef]
- Chandler, R.E.; Herman, R.; Montroll, E.W. Traffic Dynamics: Studies in Car Following. Oper. Res. 1958, 6, 165–184. [Google Scholar] [CrossRef]
- Ranjitkar, P.; Nakatsuji, T.; Kawamua, A. Car-Following Models: An Experiment based Benchmarking. J. East. Asia Soc. Transp. Stud. 2005, 6, 1582–1596. [Google Scholar]
- Rohacs, J. A new car-following model for highway traffic safety investigation. In Proceedings of the Chaos 2009, The 2nd Chaotic Modelling and Simulation International Conference, Chania, Greece, 1–5 June 2009; p. 8. [Google Scholar]
- Markou, I.; Papathanasopoulou, V.; Antoniou, C. Dynamic Car–Following Model Calibration Using SPSA and ISRES Algorithms. Period. Polytech. Transp. Eng. 2019, 47, 146–156. [Google Scholar] [CrossRef] [Green Version]
- Gazis, D.C.; Herman, R.; Rothery, R.W. Nonlinear follow-the-leader models of traffic flow. Oper. Res. 1961, 9, 545–567. [Google Scholar] [CrossRef]
- Dung, N.D.; Rohacs, J. The drone-following models in smart cities. In Proceedings of the 2018 IEEE 59th International Scientific Conference on Power and Electrical Engineering of Riga Technical University (RTUCON), Riga, Latvia, 12–13 November 2018; pp. 1–6. [Google Scholar]
- Dung, N.D. Developing Models for Managing Drones in the Transportation System in Smart Cities. Electrical. Control Commun. Eng. 2019, 15, 71–78. [Google Scholar] [CrossRef] [Green Version]
- Buzási, A.; Csete, M. Sustainability Indicators in Assessing Urban Transport Systems. Period. Polytech. Transp. Eng. 2015, 43, 138–145. [Google Scholar] [CrossRef] [Green Version]
- Litman, T. Well Measured Developing Indicators for Sustainable and Livable Transport Planning, Viktoria Transport Policy Institute. 2016, p. 107. Available online: http://www.vtpi.org/wellmeas.pdf (accessed on 26 May 2017).
- Ran, B.; Jin, P.J.; Boyce, D.; Qiu, T.Z.; Cheng, Y. Perspectives on Future Transportation Research: Impact of Intelligent Transportation System Technologies on Next-Generation Transportation Modeling. J. Intell. Transp. Syst. Technol. Plan. Oper. 2012, 16, 226–242. [Google Scholar] [CrossRef]
- Mokkadem, Y.E.; Jawab, F. Researches and Applications of Intelligent Transportations Systems in Urban Area: Systematic Literature Review. ARPN J. Eng. Appl. Sci. 2019, 14, 639–652. [Google Scholar]
- Dung, N.D. A developed particle swarm optimization algorithm for managing drones in smart cities. In Proceedings of the International Symposium on Sustainable Aviation (ISSA), Budapest, Hungary, 26–29 May 2019; pp. 81–84. [Google Scholar]
- Dung, N.D.; Rohacs, J. Robust planning the landing process of unmanned aerial vehicles. Int. J. Sustain. Aviat. 2019, 5, 1–18. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Areas and Indicators | Passive | Active | Intelligent |
|---|---|---|---|
| vehicle, infrastructure, and transportation performance (compared to the traditional transportation) (e.g., vehicle speed, fuel consumption, operational cost) | 100% | 110%–120% | 115%–130% |
| supporting systems (% of vehicles, drivers supported by service providers) (e.g., mass transport, service provided, energy support system, parking availability, accessibility, multimodal transport hubs, emergency, accident handling) | 5%–10% | 15%–30% | 95% |
| legal control (% of regulation the problems, aspects) (e.g., traffic rules, requirements for infrastructure, legal control of autonomous transport) | 35%–50% | 50%–80% | 75%–95% |
| economy (compared to the intelligent system = 100%) (e.g., supply chain support, just in time arrives, delays) | 40%–80% | 75%–90% | 100% |
| society (% of society needs being considered/covered) (e.g., demand, affordability, door-to-door speed, acceptance, safety, security) | 40%–70% | 60%–90% | 85%–96% |
| environment (change in the environmental impact using the recently available vehicles and infrastructures, compared to the traditional transportation solution) (e.g., emissions, noise, greenhouse impact, energy sources, energy mix in sources) | 100% | 80%–95% | 70%–85% |
| cultural aspects (% of service provided for non-business travels) (e.g., recreation, health, sport, transport) | 20%–40% | 35%–65% | 60%–80% |
| future generation (ratio of common solution compared to the solution optimized as a sustainable transport) (e.g., used materials, used energy) | 50%–75% | 70%–90% | 85%–95% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, D.D.; Rohács, J.; Rohács, D.; Boros, A. Intelligent Total Transportation Management System for Future Smart Cities. Appl. Sci. 2020, 10, 8933. https://doi.org/10.3390/app10248933
Nguyen DD, Rohács J, Rohács D, Boros A. Intelligent Total Transportation Management System for Future Smart Cities. Applied Sciences. 2020; 10(24):8933. https://doi.org/10.3390/app10248933
Chicago/Turabian StyleNguyen, Dinh Dung, József Rohács, Dániel Rohács, and Anita Boros. 2020. "Intelligent Total Transportation Management System for Future Smart Cities" Applied Sciences 10, no. 24: 8933. https://doi.org/10.3390/app10248933
APA StyleNguyen, D. D., Rohács, J., Rohács, D., & Boros, A. (2020). Intelligent Total Transportation Management System for Future Smart Cities. Applied Sciences, 10(24), 8933. https://doi.org/10.3390/app10248933