Configurable 3D Rowing Model Renders Realistic Forces on a Simulator for Indoor Training



Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Rowing Setup
2.3. 3D Modeling of Rowing Forces
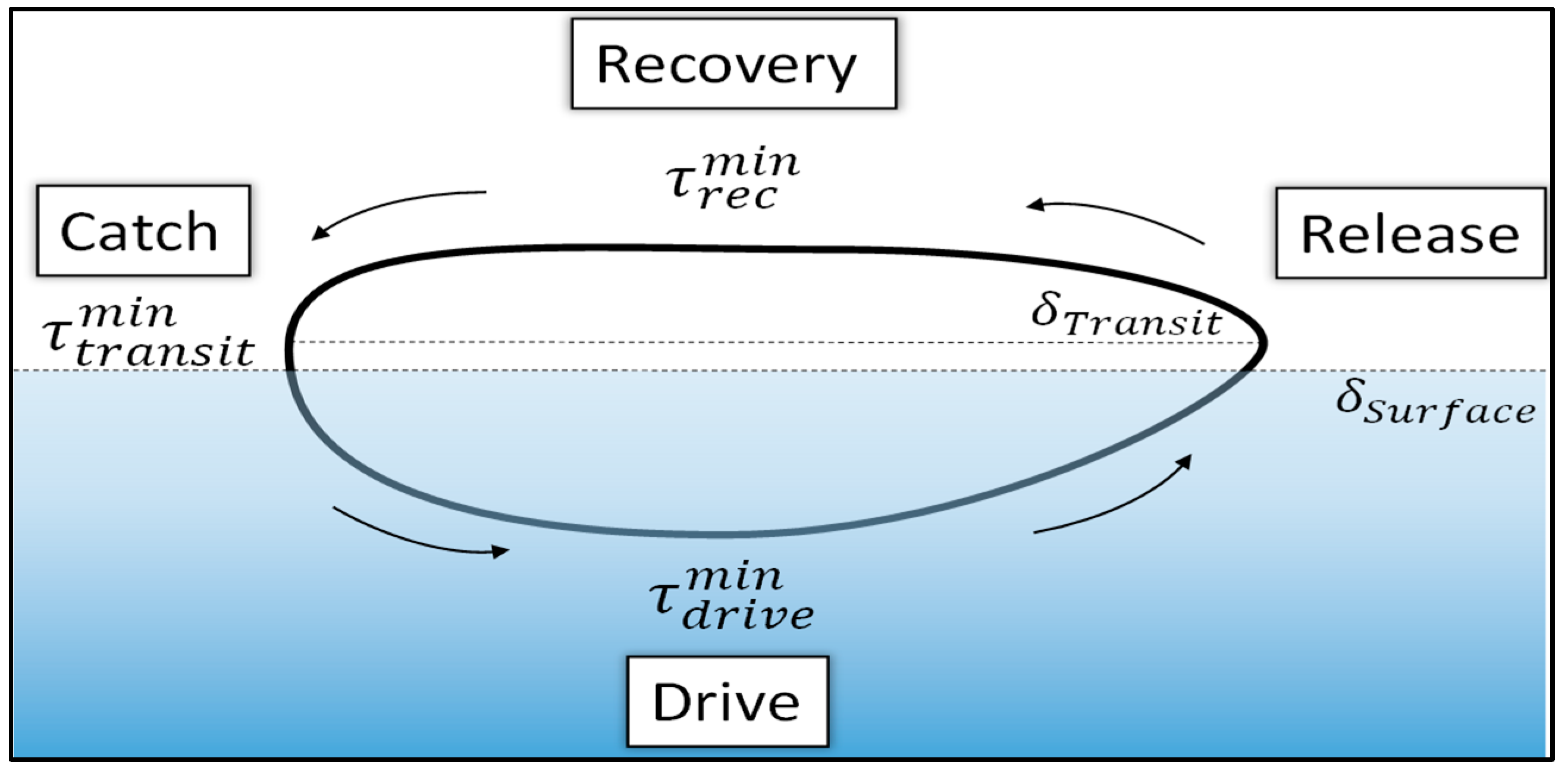
2.3.1. Sub-Phases of a Rowing Stroke
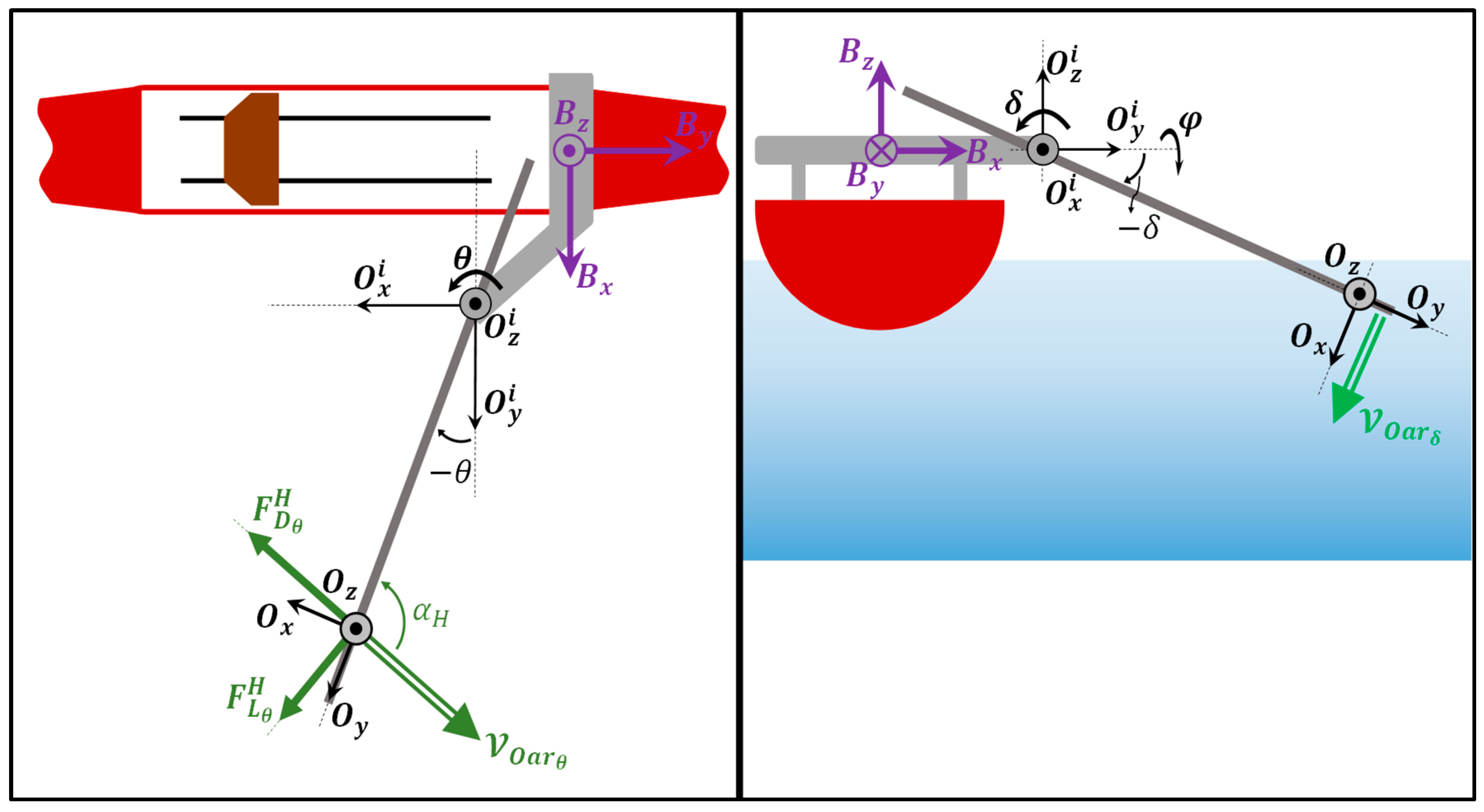
2.3.2. Simulator Coordinates for the Rowing Models
2.3.3. Description and Implementation of Base (1D) Models of Rowing for Blade–Water Interaction
2.3.4. 3D rowing Model with Binary Blade Immersion and Fixed Drag/Lift Coefficients (BIFC)
2.3.5. 3D Rowing Model with Linear Blade Immersion and Adjusted Drag/Lift Coefficients (LIAC)
2.3.6. Rendering of Forces on the Rowing Simulator
2.3.7. Control of Rope Tension Forces during Recovery
2.3.8. Configurable Parameters of LIAC for an Individualized Rowing Experience on the Simulator
2.4. Experimental Protocol
2.5. Task
2.6. Questionnaire
2.7. Questionnaire Analysis (Statistics)
3. Results
3.1. Comparison of Base Rowing Models (BIFC vs. LIAC)
3.1.1. Aspect 1 and 2: Interaction between Oar Blade and Water Surface
3.1.2. Aspect 3 and 4: Interaction of Oar Blade and Virtual Water during Sub-Phases of the Rowing Cycle
3.1.3. Aspect 5: Overall Realism of the Rowing Forces and Synchronized Flow of Visual Scenario
3.2. Effect of Individualized Configuration (LIAC vs. Individually Configured model (IND))
3.2.1. Aspect 1 and 2: Interaction between Oar Blade and Water Surface
3.2.2. Aspect 3 and 4: Interaction of Oar Blade and Virtual Water during Sub-Phases of the Rowing Cycle
3.2.3. Aspect 5: Overall Realism of the Rowing Forces and Synchronized Flow of Visual Scenario
4. Discussion
4.1. Comparison of Two 3D Rowing Models (BIFC vs. LIAC)
4.1.1. Rowing Cycle and Sub-Phases
4.1.2. Auxiliary Aspects of Rowing Movement
4.1.3. Visual Scenario
4.2. Effect of Individualization on the Perceived Realism of a Rowing Simulator (LIAC vs. IND)
4.2.1. Rowing Cycle and Sub-Phases
4.2.2. Auxiliary Aspects of Rowing Movement
4.2.3. Visual Scenario
4.3. Practical Implications
4.4. Limitations
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Smith, R.M.; Loschner, C. Biomechanics feedback for rowing. J. Sports Sci. 2002, 20, 783–791. [Google Scholar] [CrossRef] [PubMed]
- Warmenhoven, J.; Cobley, S.; Draper, C.; Smith, R. Over 50 Years of Researching Force Profiles in Rowing: What Do We Know? Sports Med. 2018, 48, 2703–2714. [Google Scholar] [CrossRef] [PubMed]
- Hawkins, D. A new instrumentation system for training rowers. J. Biomech. 2000, 33, 241–245. [Google Scholar] [CrossRef]
- Hofmijster, M.J.; Landman, E.H.; Smith, R.M.; Van Soest, A.J. Effect of stroke rate on the distribution of net mechanical power in rowing. J. Sports Sci. 2007, 25, 403–411. [Google Scholar] [CrossRef]
- Nolte, V. Rowing Faster, 2nd ed.; Human Kinetics: Champaign, IL, USA, 2011. [Google Scholar]
- Schmidt, R.A.; Wrisberg, C.A. Motor Learning and Performance: A Situation-Based Learning Approach; Human kinetics: Champaign, IL, USA, 2008. [Google Scholar]
- Kleshnev, V.; Nolte, V. Learning from racing. In Rowing Faster; Human Kinetics: Champaign, IL, USA, 2011. [Google Scholar]
- Soper, C.; Hume, P.A. Towards an ideal rowing technique for performance. Sports Med. 2004, 34, 825–848. [Google Scholar] [CrossRef]
- A Brief History of Rowing Machines. Available online: www.allrowers.com/history-of-rowing-machines.html (accessed on 21 December 2019).
- Stettler, D. Improvement of oar water interactions in the M3-rowing simulator. Bachelor’s Thesis, Swiss Federal Institute of Technology (ETH) Zurich, Zurich, Switzerland, June 2014. [Google Scholar]
- Indoor Rowing Tanks. Available online: www.durhamboat.com/rowing-tanks/ (accessed on 22 December 2019).
- Air vs. Magnetic Rowing Machine: What Is the Difference? Available online: www.rowingmachineking.com/air-vs-magnetic-rowing-machine-difference/ (accessed on 22 December 2019).
- Kleshnev, V. Comparison of on-water rowing with its simulation on Concept2 and Rowperfect machines. In Proceedings of the ISBS-Conference Proceedings Archive, Beijing, China, 22–27 August 2005. [Google Scholar]
- Indoor Sculler. Available online: www.rowperfect.com.au/ (accessed on 22 December 2019).
- Dynamic Indoor Rower for Athletes & Teams. Available online: www.concept2.com/indoor-rowers/dynamic (accessed on 22 December 2019).
- Rowing Innovations. Available online: www.rowinginnovations.com/swingulator-sweep-trainer/ (accessed on 22 December 2019).
- Coffey Corporation. Available online: coffeycorporation.com/SimulatOar.php (accessed on 22 December 2019).
- Biorower. Available online: www.biorower.com/ (accessed on 22 December 2019).
- Filippeschi, A.; Ruffaldi, E. Boat dynamics and force rendering models for the sprint system. IEEE Trans. Hum. Mach. Syst. 2013, 43, 631–642. [Google Scholar] [CrossRef]
- Ruffaldi, E.; Filippeschi, A. Structuring a virtual environment for sport training: A case study on rowing technique. Robot. Auton. Syst. 2013, 61, 390–397. [Google Scholar] [CrossRef] [Green Version]
- Rauter, G.; von Zitzewitz, J.; Duschau-Wicke, A.; Vallery, H.; Riener, R. A tendon-based parallel robot applied to motor learning in sports. In Proceedings of the 2010 3rd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, Tokyo, Japan, 26–29 September 2010; pp. 82–87. [Google Scholar]
- Rauter, G.; Sigrist, R.; Koch, C.; Crivelli, F.; van Raai, M.; Riener, R.; Wolf, P. Transfer of complex skill learning from virtual to real rowing. PLoS ONE 2013, 8, e82145. [Google Scholar] [CrossRef] [Green Version]
- M3 Rowing Simulator. Available online: www.rowing.ethz.ch/ (accessed on 22 December 2019).
- Basalp, E.; Gerig, N.; Marchal-Crespo, L.; Sigrist, R.; Riener, R.; Wolf, P. Visual augmentation of spatiotemporal errors in a rowing task. In Proceedings of the Human Movement and Technology: Book of abstracts-11th Joint Conference on Motor Control & Learning, Biomechanics & Training, Darmstadt, Germany, 28–30 September 2016. [Google Scholar]
- Gerig, N.; Basalp, E.; Sigrist, R.; Riener, R.; Wolf, P. Visual error amplification showed no benefit for non-naïve subjects in trunk-arm rowing. Curr. Issues Sport Sci. (CISS) 2019, 3. [Google Scholar] [CrossRef] [Green Version]
- Rauter, G.; Gerig, N.; Sigrist, R.; Riener, R.; Wolf, P. When a robot teaches humans: Automated feedback selection accelerates motor learning. Sci. Robot. 2019, 4, eaav1560. [Google Scholar] [CrossRef]
- Basalp, E.; Marchal-Crespo, L.; Rauter, G.; Riener, R.; Wolf, P. Rowing simulator modulates water density to foster motor learning. Front. Robot. AI 2019, 6, 74. [Google Scholar] [CrossRef] [Green Version]
- Rauter, G. Enhancing Robot-Assisted Motor Learning by a Virtual Trainer. Ph.D. Thesis, Swiss Federal Institute of Technology (ETH) Zurich, Zurich, Switzerland, 2013. [Google Scholar]
- Cabrera, D.; Ruina, A.; Kleshnev, V. A simple 1+ dimensional model of rowing mimics observed forces and motions. Hum. Mov. Sci. 2006, 25, 192–220. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- von Zitzewitz, J.; Wolf, P.; Novaković, V.; Wellner, M.; Rauter, G.; Brunschweiler, A.; Riener, R. Real-time rowing simulator with multimodal feedback. Sports Technol. 2008, 1, 257–266. [Google Scholar] [CrossRef]
- Zitzewitz, J.v.; Rauter, G.; Steiner, R.; Brunschweiler, A.; Riener, R. A versatile wire robot concept as a haptic interface for sport simulation. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 313–318. [Google Scholar]
- Dawson, R.; Lockwood, R.; Wilson, J.; Freeman, G. The rowing cycle: Sources of variance and invariance in ergometer and on-the-water performance. J. Mot. Behav. 1998, 30, 33–43. [Google Scholar] [CrossRef] [PubMed]
- Tessendorf, B.; Gravenhorst, F.; Arnrich, B.; Tröster, G. An imu-based sensor network to continuously monitor rowing technique on the water. In Proceedings of the 2011 Seventh International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Adelaide, Australia, 6–9 December 2011; pp. 253–258. [Google Scholar]
- Caplan, N.; Gardner, T.N. A fluid dynamic investigation of the Big Blade and Macon oar blade designs in rowing propulsion. J. Sports Sci. 2007, 25, 643–650. [Google Scholar] [CrossRef]
- Wang, Z.J.; Birch, J.M.; Dickinson, M.H. Unsteady forces and flows in low Reynolds number hovering flight: Two-dimensional computations vs robotic wing experiments. J. Exp. Biol. 2004, 207, 449–460. [Google Scholar] [CrossRef] [Green Version]
- On Rowing. Available online: home.hccnet.nl/m.holst/RoeiWeb.html (accessed on 14 December 2019).
- Cabrera, D.; Ruina, A. Propulsive efficiency of rowing oars. J. Appl. Biomech. 2006. [Google Scholar]
- Diao, X.; Ma, O. Vibration analysis of cable-driven parallel manipulators. Multibody Syst. Dyn. 2009, 21, 347–360. [Google Scholar] [CrossRef]
- Enayati, N.; Okamura, A.M.; Mariani, A.; Pellegrini, E.; Coad, M.M.; Ferrigno, G.; De Momi, E. Robotic assistance-as-needed for enhanced visuomotor learning in surgical robotics training: An experimental study. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 6631–6636. [Google Scholar]
- De Winter, J.C.; Dodou, D.; Mulder, M. Training effectiveness of whole body flight simulator motion: A comprehensive meta-analysis. Int. J. Aviat. Psychol. 2012, 22, 164–183. [Google Scholar] [CrossRef]
- Marchal-Crespo, L.; van Raai, M.; Rauter, G.; Wolf, P.; Riener, R. The effect of haptic guidance and visual feedback on learning a complex tennis task. Exp. Brain Res. 2013, 231, 277–291. [Google Scholar] [CrossRef] [Green Version]
- Rauter, G.; Sigrist, R.; Riener, R.; Wolf, P. Learning of temporal and spatial movement aspects: A comparison of four types of haptic control and concurrent visual feedback. IEEE Trans. Haptics 2015, 8, 421–433. [Google Scholar] [CrossRef] [PubMed]
- Gopher, D. Skill training in multimodal virtual environments. Work 2012, 41, 2284–2287. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Miles, H.C.; Pop, S.R.; Watt, S.J.; Lawrence, G.P.; John, N.W. A review of virtual environments for training in ball sports. Comput. Graph. 2012, 36, 714–726. [Google Scholar] [CrossRef]
- Rowing Technique for Coaches—Catch, Drive, Release and Recovery. Available online: http://rowingact.org.au/former%20website/SDO/TECHNIQUE_1.html (accessed on 19 December 2019).
- Macrossan, M.N.; Kamphorst, M. Computational Study of the Froude Number Effects on the Flow around a Rowing Blade; Department of Mechanical Engineering Report, University of Queensland: Queensland, Australia, October 2009. [Google Scholar]
- Coppel, A.L. A Computational Fluid Dynamic Investigation of Rowing Oar Blades. Ph.D. Thesis, University of Birmingham, Edgbaston, Birmingham, UK, 2010. [Google Scholar]
- 2019 World Rowing Championships. Available online: http://www.worldrowing.com/events/2019-world-rowing-championships/schedule-results (accessed on 19 December 2019).
- OARS - smartOar. Available online: https://www.smartoar.com/oars/ (accessed on 20 December 2019).
- Biorow Sensors and Electronics. Available online: http://biorow.com/products/biorow_sensors/ (accessed on 19 December 2019).
- Sigrist, R.; Rauter, G.; Riener, R.; Wolf, P. Terminal feedback outperforms concurrent visual, auditory, and haptic feedback in learning a complex rowing-type task. J. Mot. Behav. 2013, 45, 455–472. [Google Scholar] [CrossRef] [Green Version]
- Sigrist, R.; Rauter, G.; Marchal-Crespo, L.; Riener, R.; Wolf, P. Sonification and haptic feedback in addition to visual feedback enhances complex motor task learning. Exp. Brain Res. 2015, 233, 909–925. [Google Scholar] [CrossRef]
- Wellner, M.; Sigrist, R.; von Zitzewitz, J.; Wolf, P.; Riener, R. Does a virtual audience influence rowing? Proc. Inst. Mech. Eng. P J. Sports Eng. Technol. 2010, 224, 117–128. [Google Scholar] [CrossRef] [Green Version]
- Readi, N.; Rosso, V.; Rainoldi, A.; Vieira, T. Do sweep rowers symmetrically activate their low back muscles during indoor rowing? Scand. J. Med. Sci. Sports 2015, 25, e339–e352. [Google Scholar] [CrossRef]
- Fohanno, V.; Nordez, A.; Smith, R.; Colloud, F. Asymmetry in elite rowers: Effect of ergometer design and stroke rate. Sports Biomech. 2015, 14, 310–322. [Google Scholar] [CrossRef]
- Parkin, S.; Nowicky, A.V.; Rutherford, O.M.; McGregor, A.H. Do oarsmen have asymmetries in the strength of their back and leg muscles? J. Sports Sci. 2001, 19, 521–526. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experts | Individually Configured Parameters of the LIAC Model | |||||||
|---|---|---|---|---|---|---|---|---|
| Gain for Drag and Lift Coefficient | Minimum Rope Forces in Recovery () () | Gain for Boat Drag Coefficient | Oar Blade Curvature (°) | |||||
| Initial Value | Final Value | Initial Value | Final Value | Initial Value | Final Value | Initial Value | Final Value | |
| E1 | ||||||||
| E2 | ||||||||
| E3 | ||||||||
| E4 | ||||||||
| E5 | ||||||||
| E6 | ||||||||
| E7 | ||||||||
| E8 | ||||||||
| E9 | ||||||||
| E10 | ||||||||
| Aspect of Rowing | Quest. Index | lme-1: | lme-2: | ||
|---|---|---|---|---|---|
| Mean Rating of Models | Main Effect of Group and p-Value | Mean Rating of Models | Main Effect of Group and p-Value | ||
| A1 | Q1 | ||||
| Q2 | |||||
| A2 | Q3 | . | |||
| Q4 | |||||
| A3 | Q5 | ||||
| Q6 | |||||
| A4 | Q7 | ||||
| Q8 | |||||
| A5 | Q9 | ||||
| Q10 | |||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Basalp, E.; Bachmann, P.; Gerig, N.; Rauter, G.; Wolf, P. Configurable 3D Rowing Model Renders Realistic Forces on a Simulator for Indoor Training. Appl. Sci. 2020, 10, 734. https://doi.org/10.3390/app10030734
Basalp E, Bachmann P, Gerig N, Rauter G, Wolf P. Configurable 3D Rowing Model Renders Realistic Forces on a Simulator for Indoor Training. Applied Sciences. 2020; 10(3):734. https://doi.org/10.3390/app10030734
Chicago/Turabian StyleBasalp, Ekin, Patrick Bachmann, Nicolas Gerig, Georg Rauter, and Peter Wolf. 2020. "Configurable 3D Rowing Model Renders Realistic Forces on a Simulator for Indoor Training" Applied Sciences 10, no. 3: 734. https://doi.org/10.3390/app10030734
APA StyleBasalp, E., Bachmann, P., Gerig, N., Rauter, G., & Wolf, P. (2020). Configurable 3D Rowing Model Renders Realistic Forces on a Simulator for Indoor Training. Applied Sciences, 10(3), 734. https://doi.org/10.3390/app10030734