Railway Wheel Flat Recognition and Precise Positioning Method Based on Multisensor Arrays

Abstract
:Featured Application
Abstract
1. Introduction
2. Multisensor Array Layout Scheme Based on the Spatial Distribution Characteristics of Rail Strain
2.1. Establishment of Simulation Model
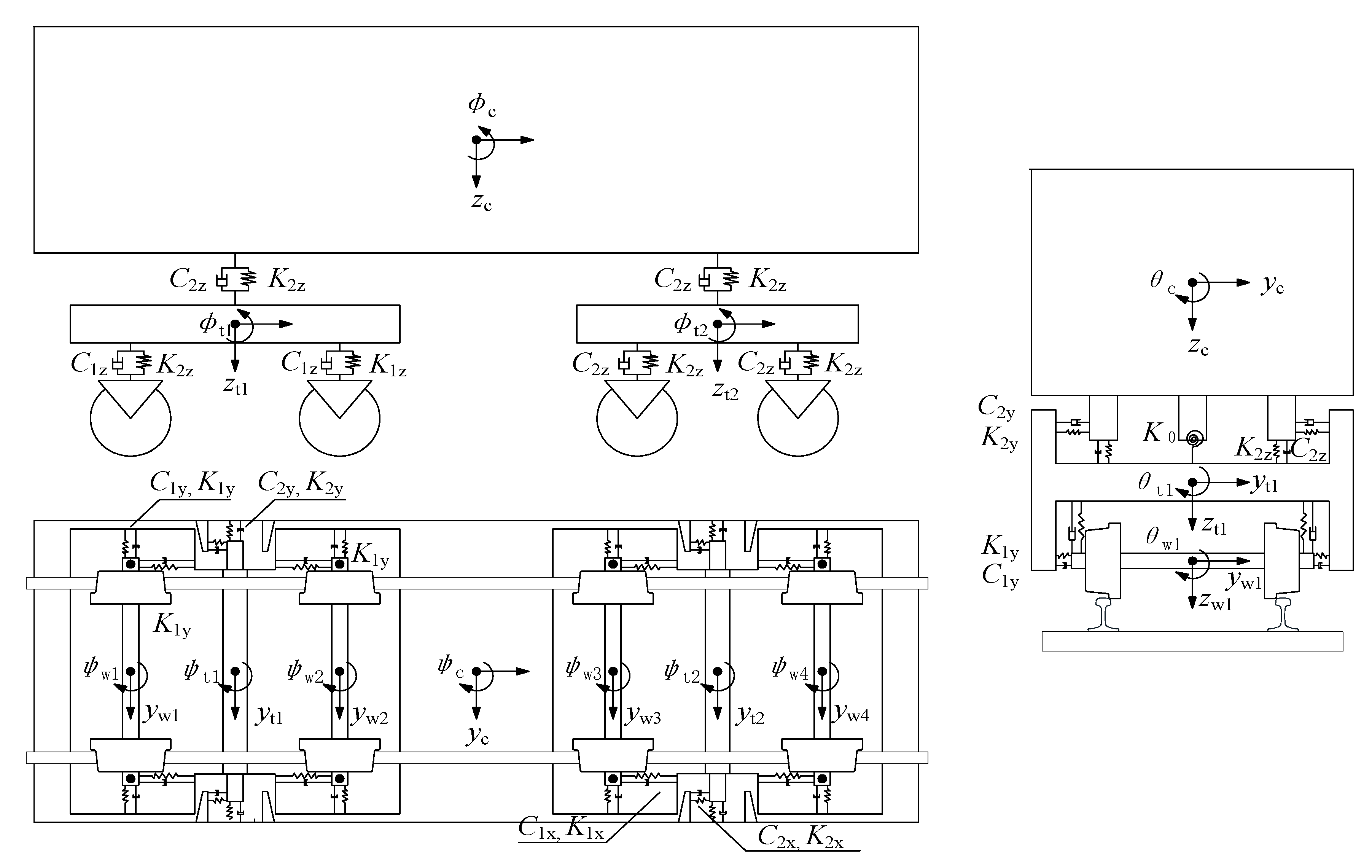
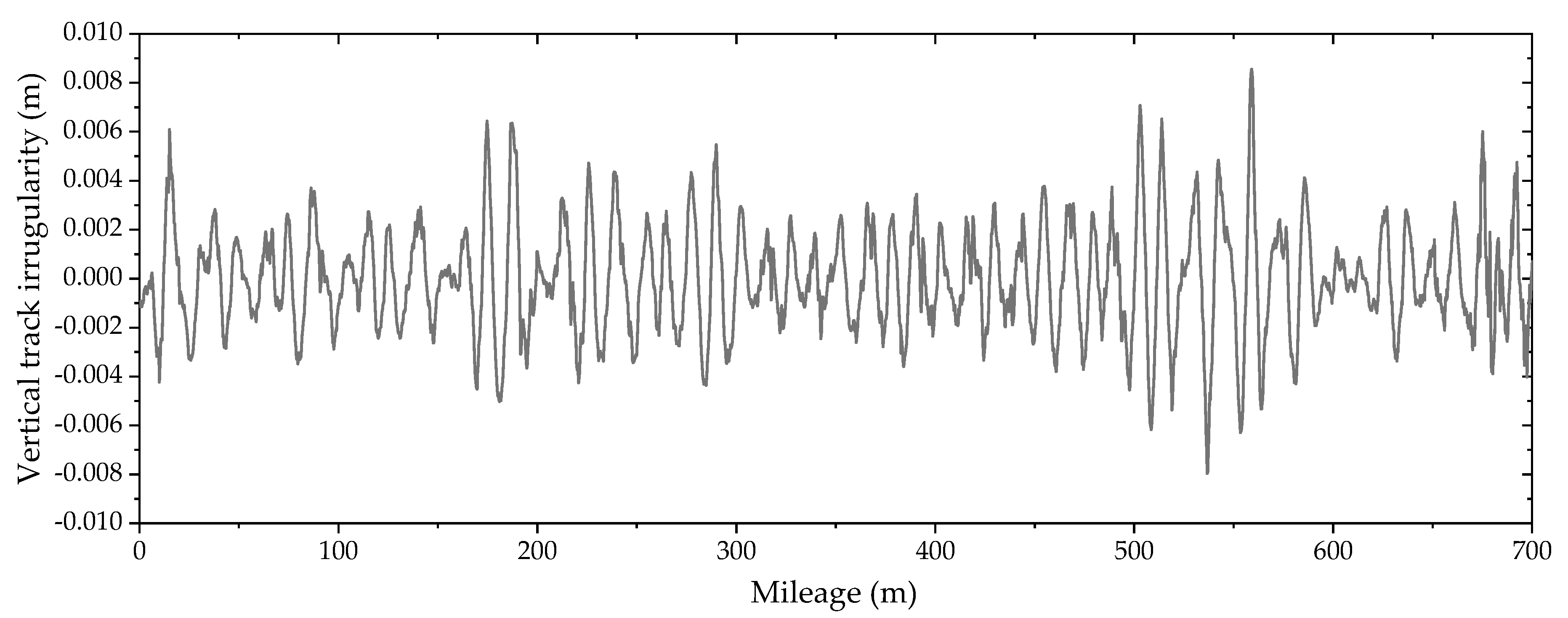
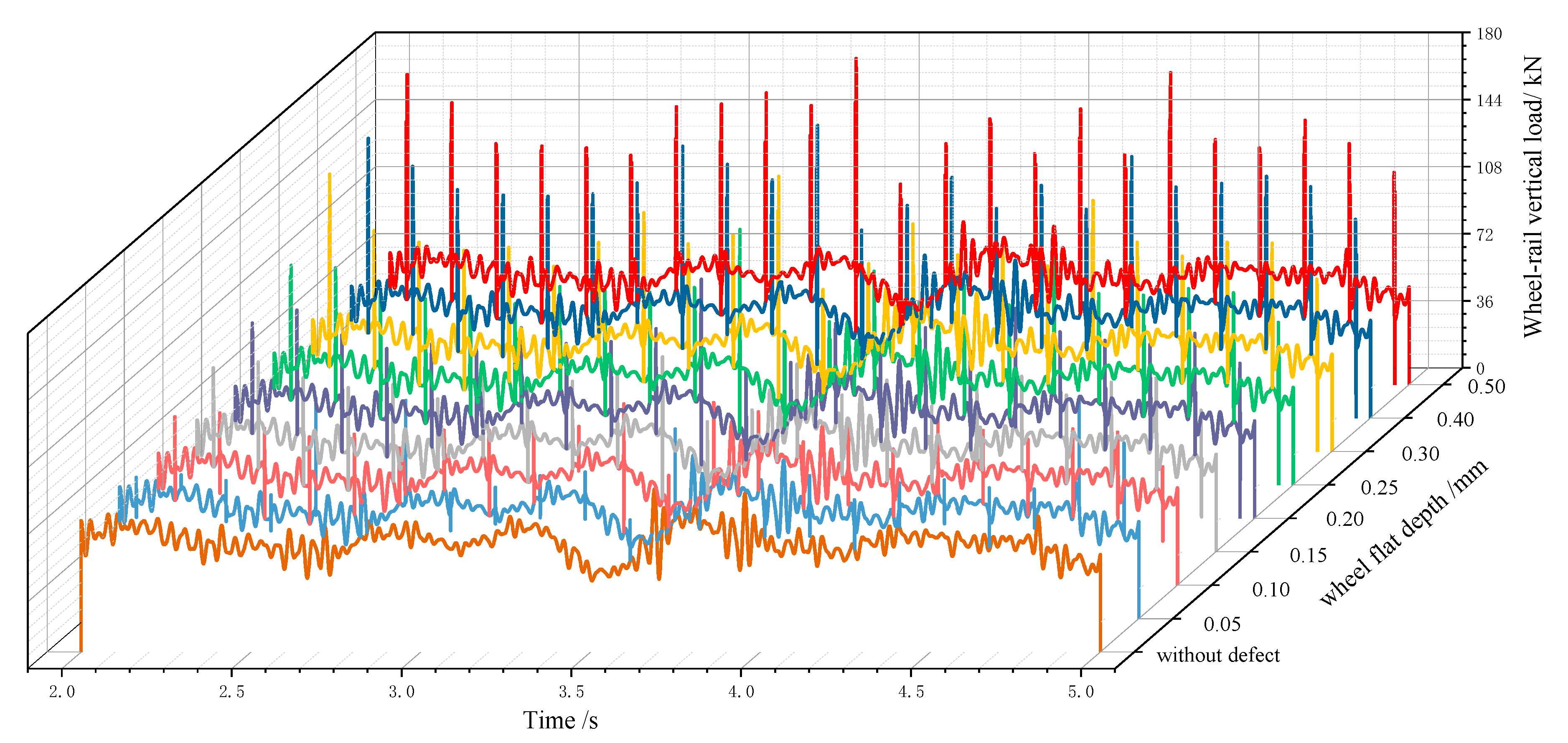
2.1.1. Wheel-Rail Force Simulation Model
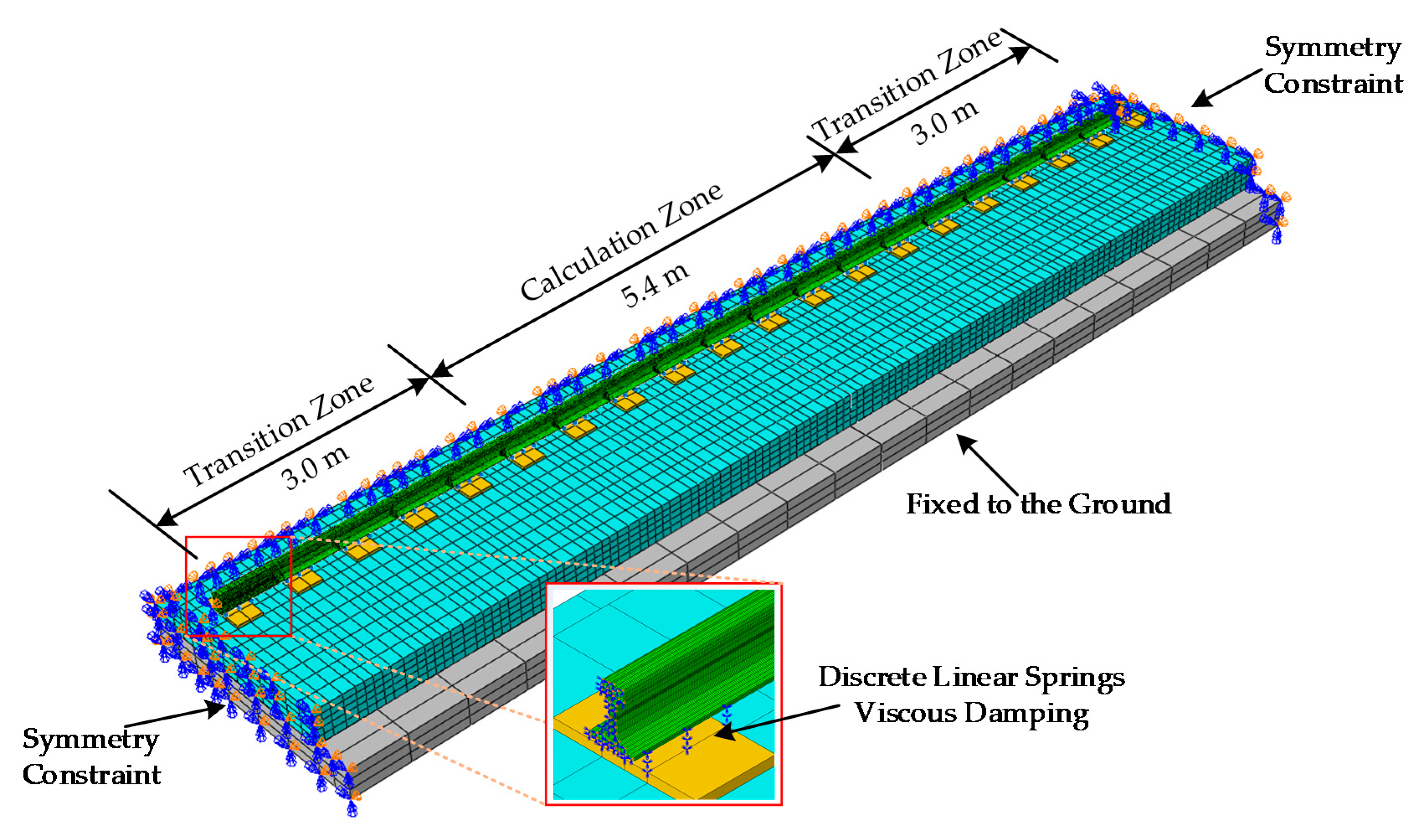
2.1.2. Refined Rail Response Simulation Model
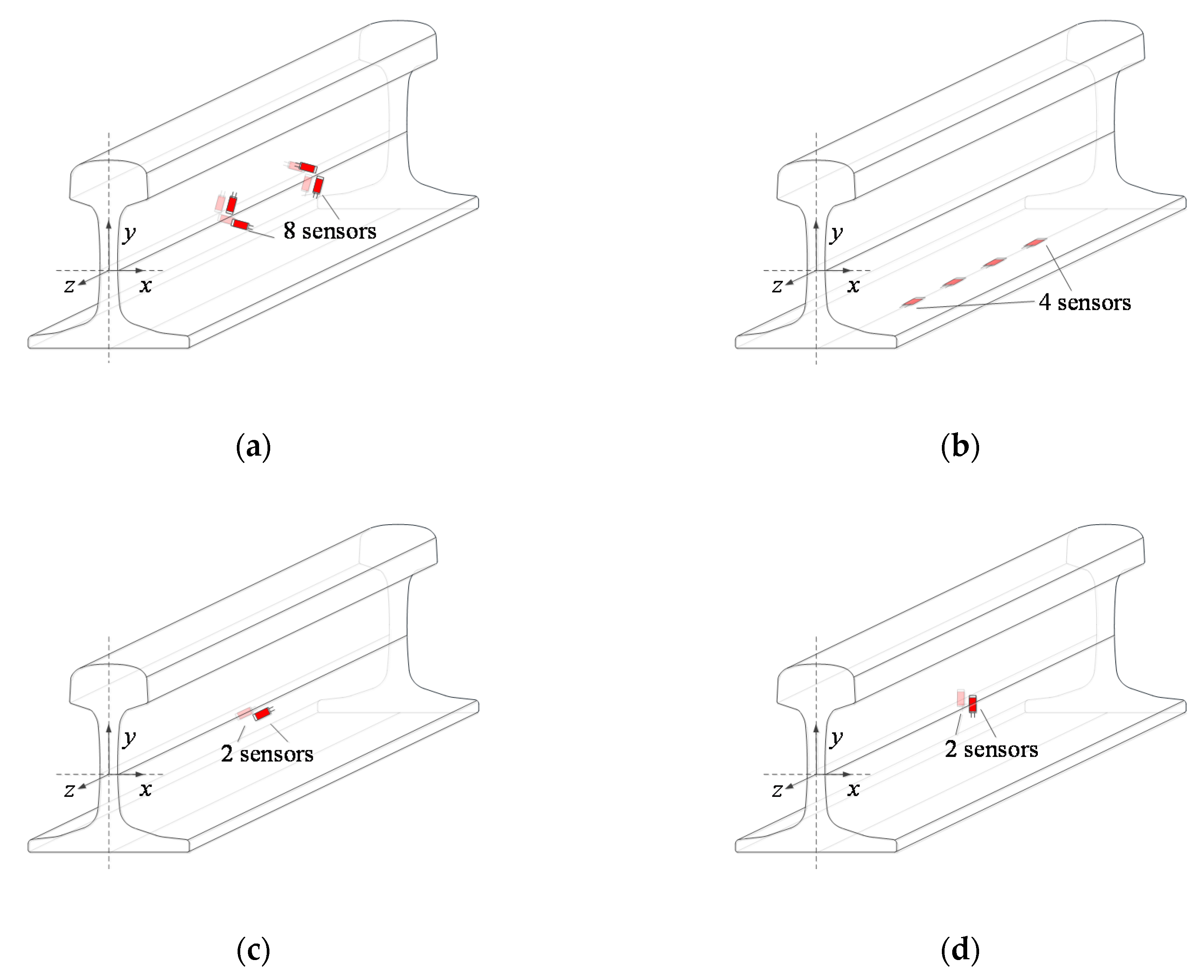
2.2. Layout Scheme of Multisensor Arrays in the Rail Cross-Section
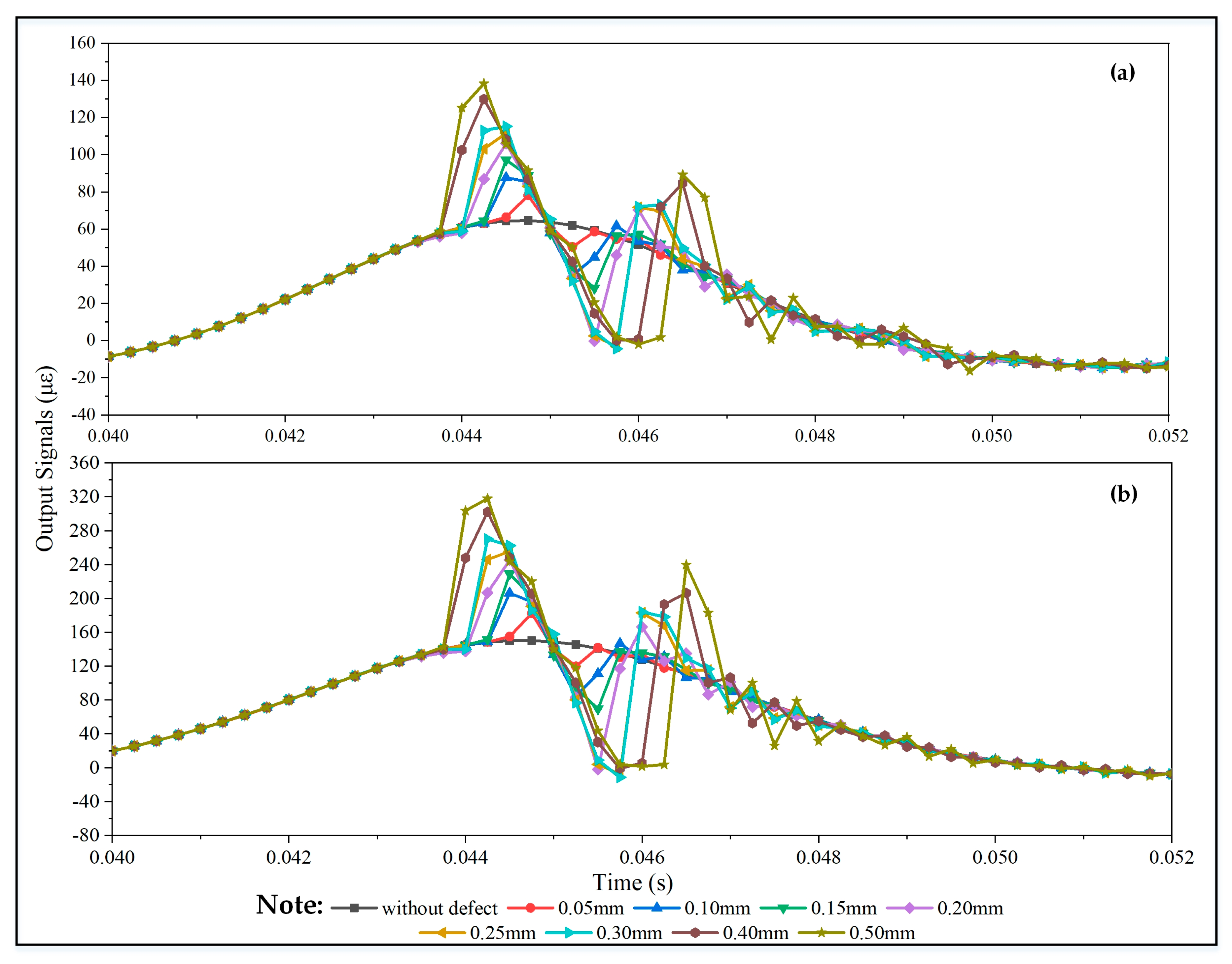
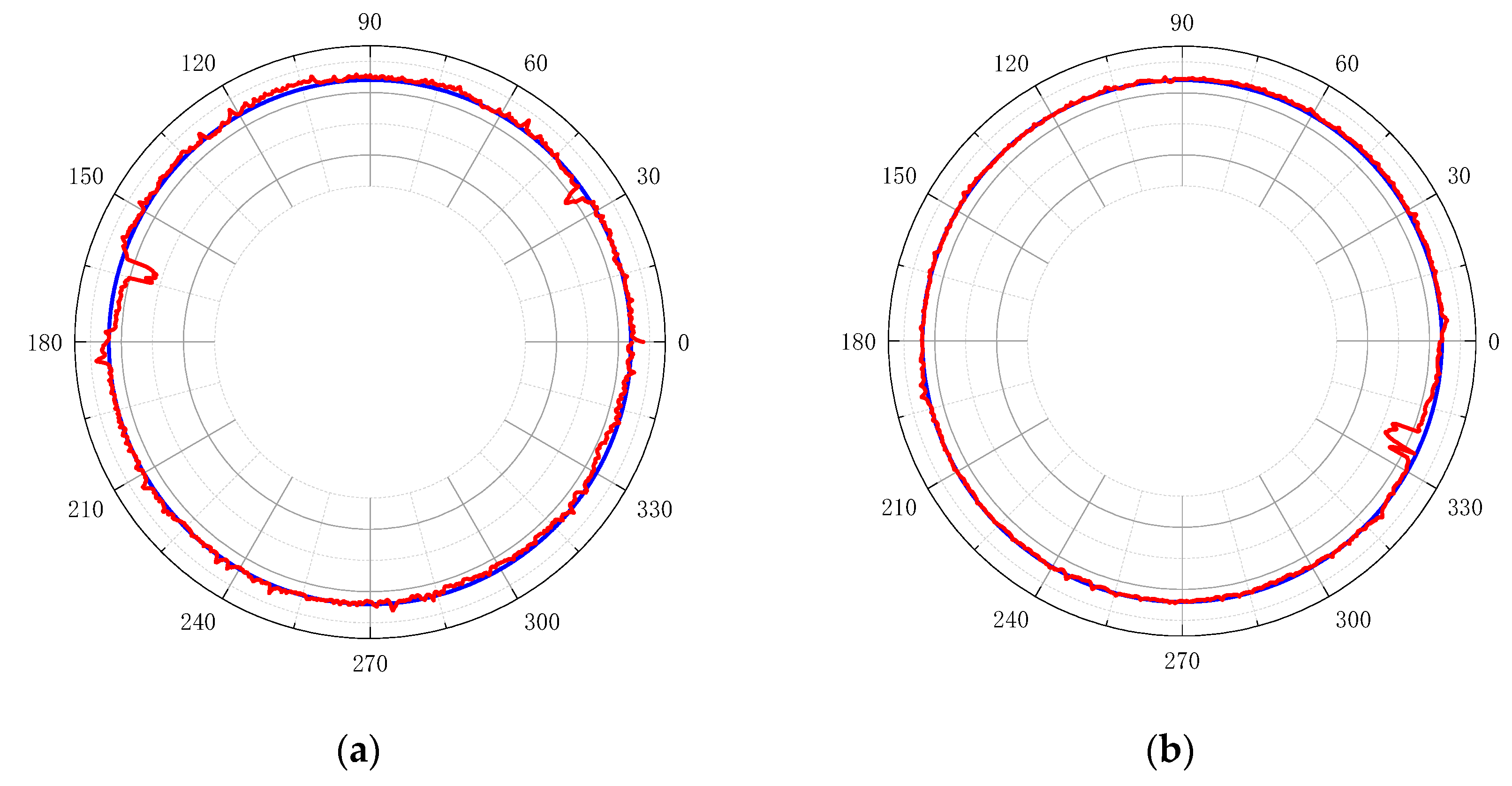
2.2.1. Sensitivity of Different Layout Schemes to Wheel Flats
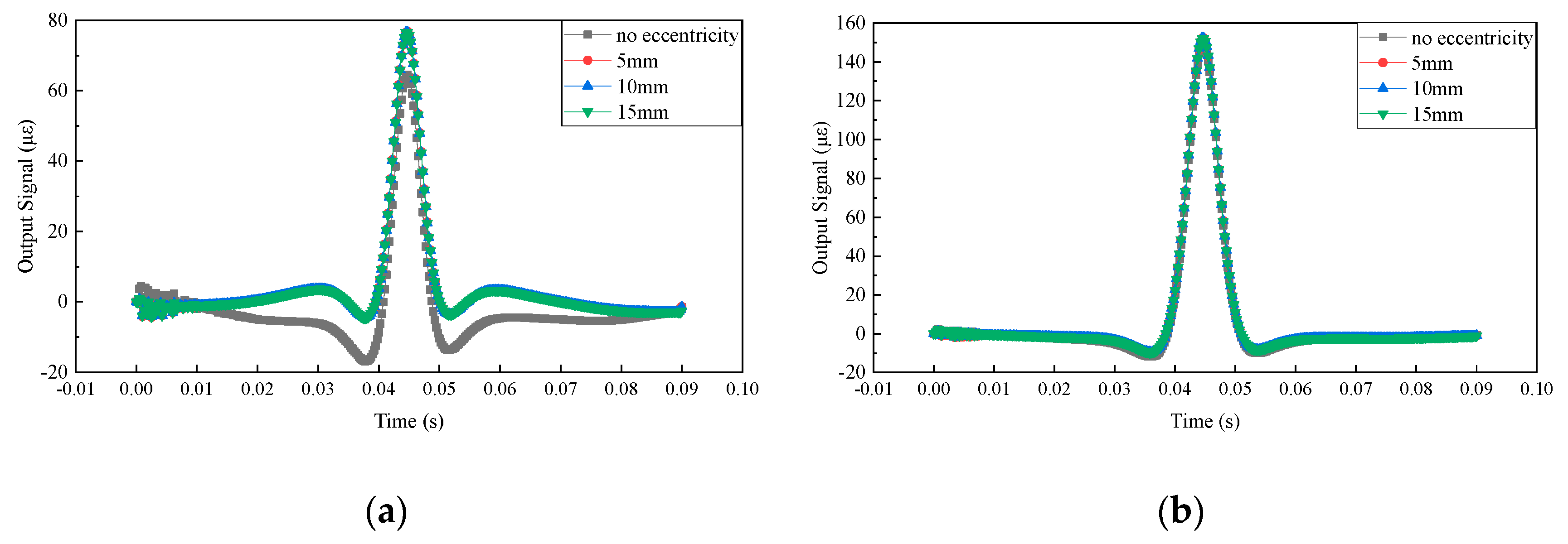
2.2.2. Influences of Wheel-Rail Contact States on Different Layout Schemes
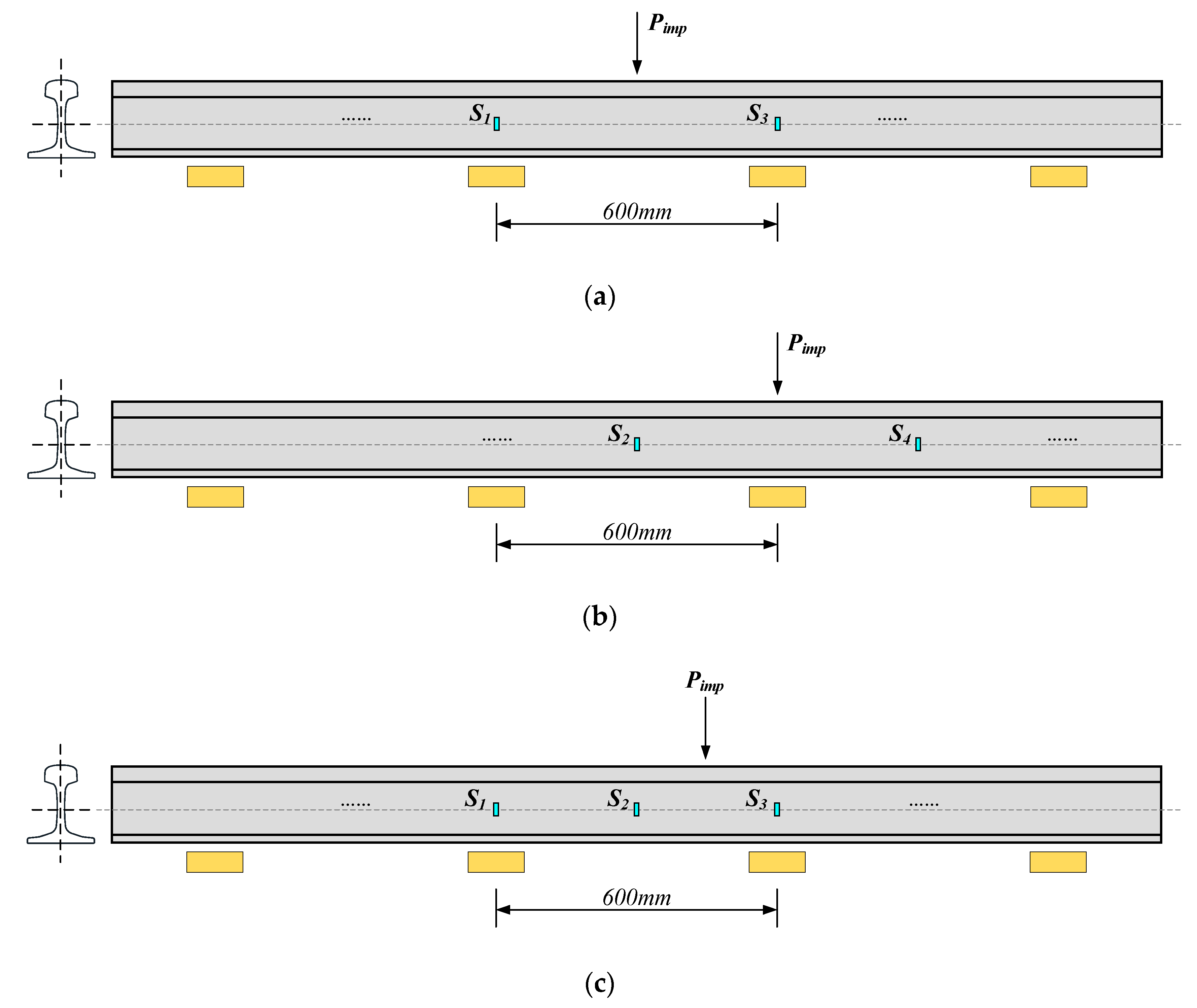
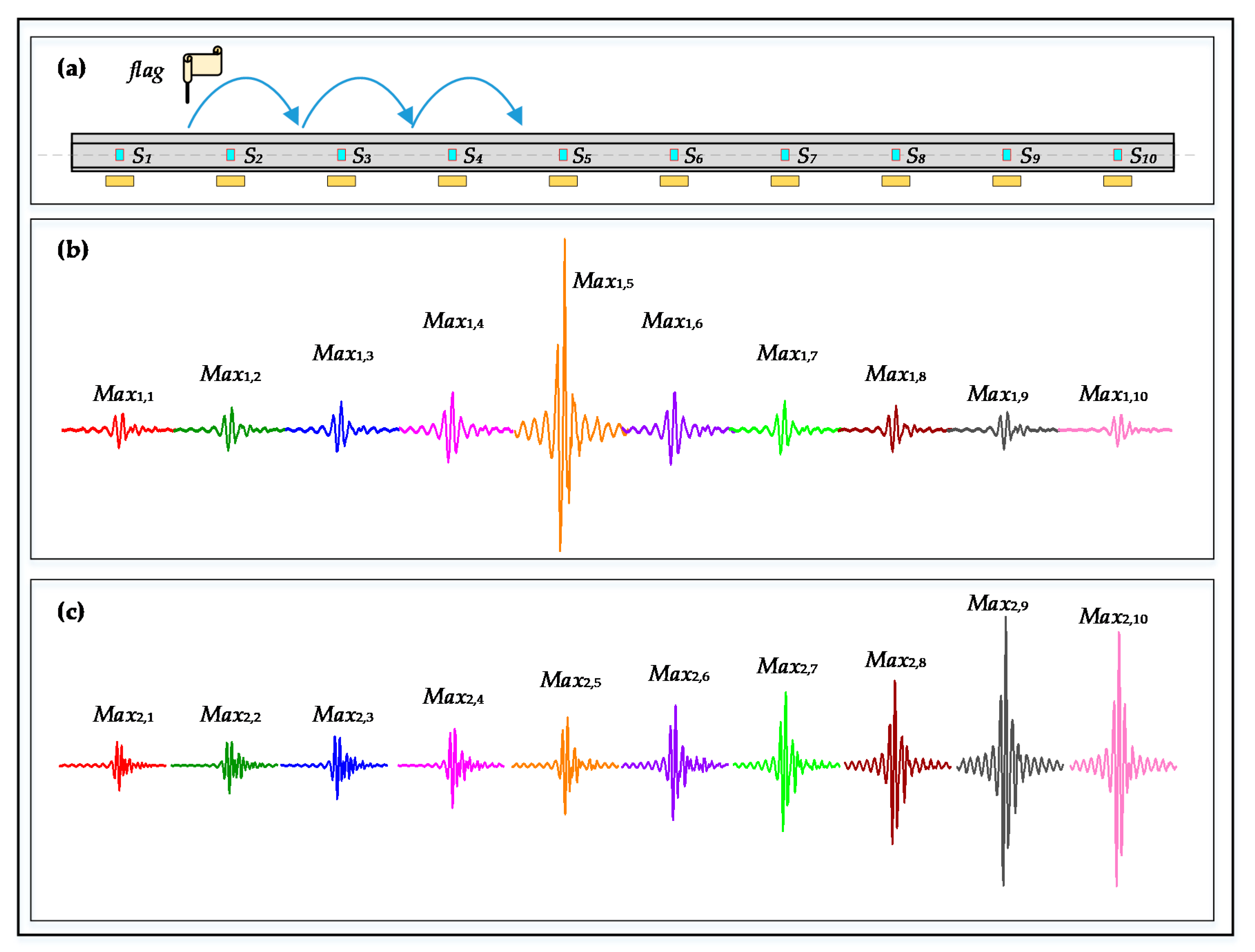
2.3. Layout Scheme of Multisensor Arrays along the Longitudinal Direction of Rail
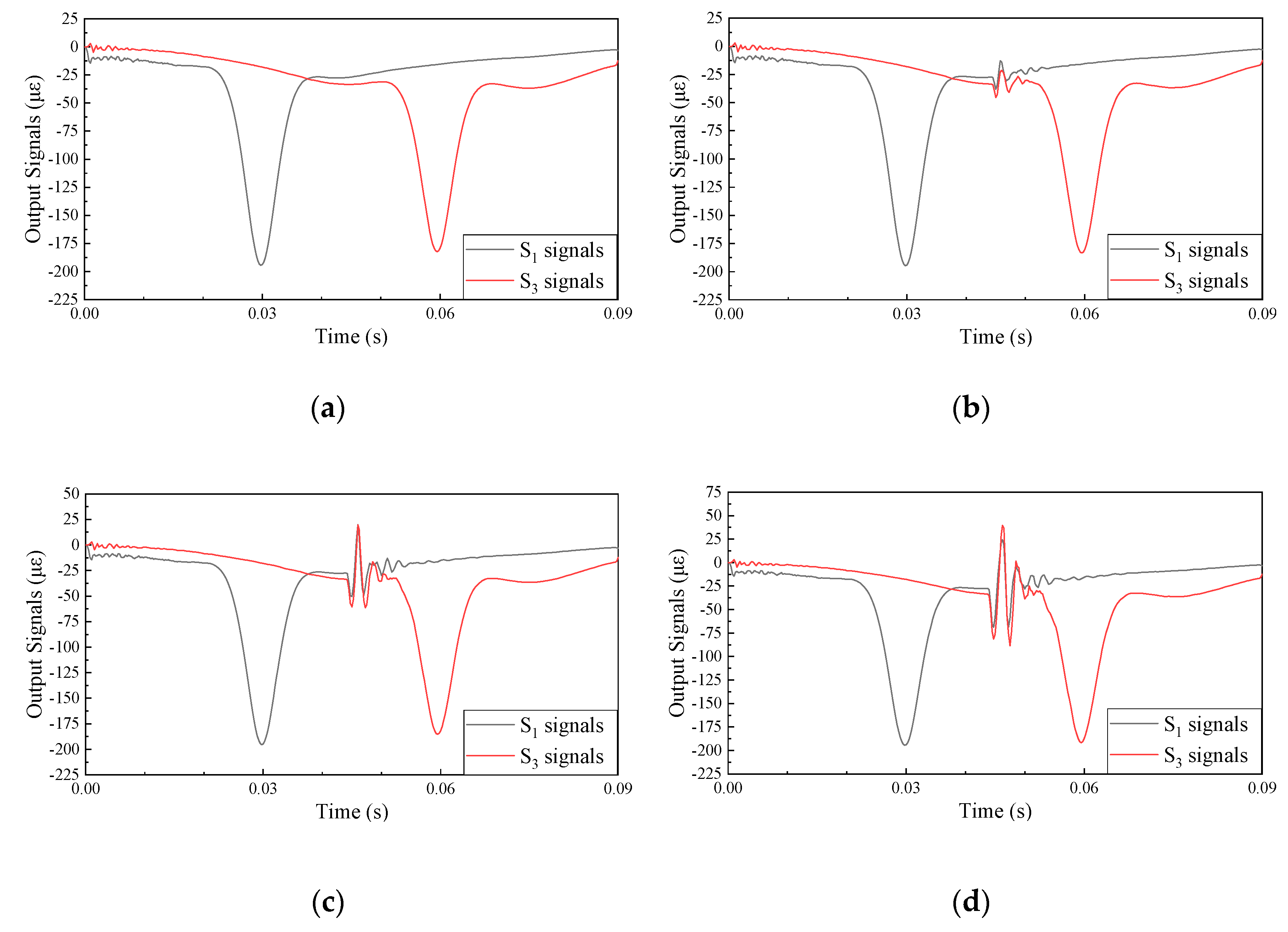
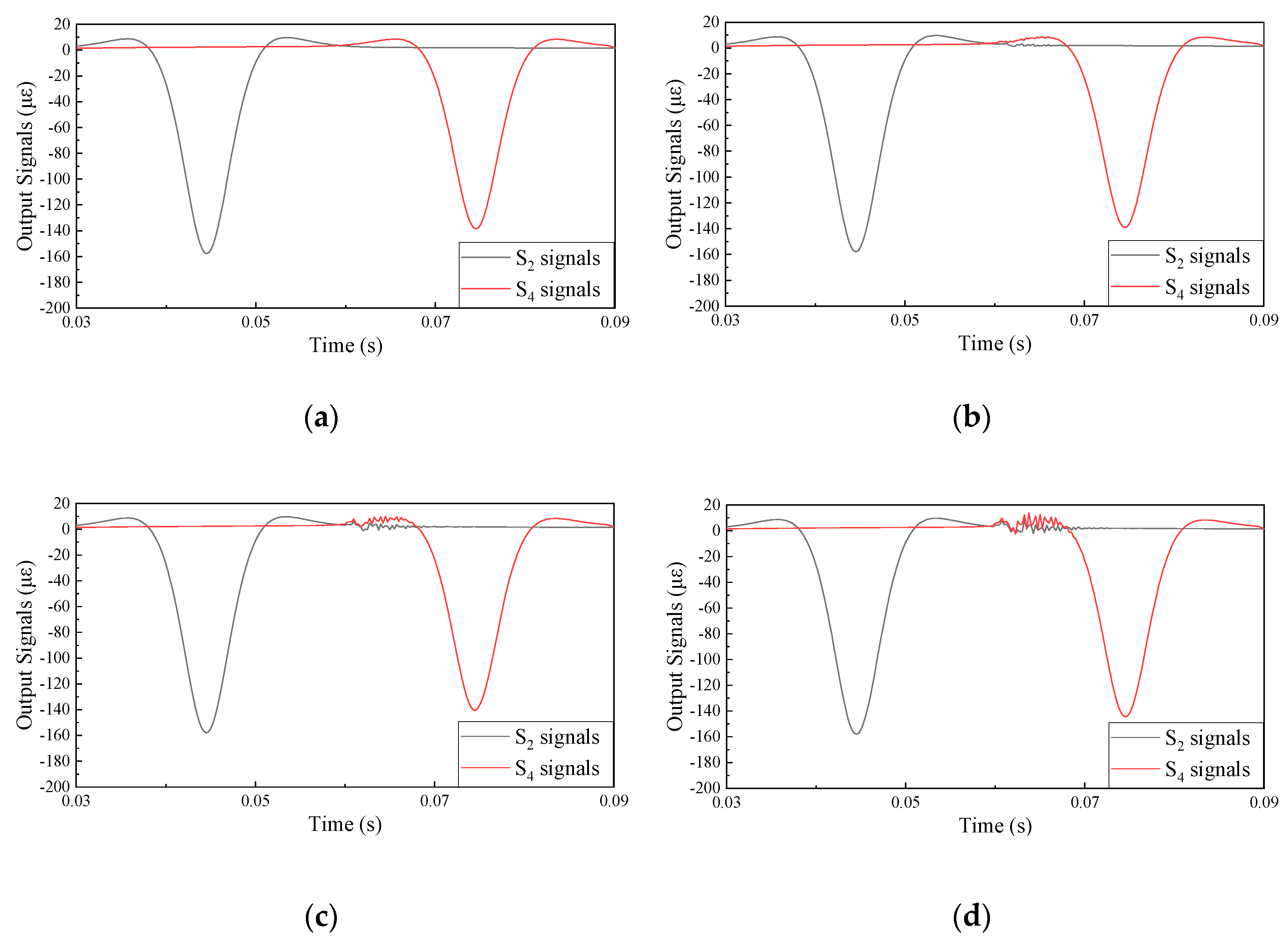
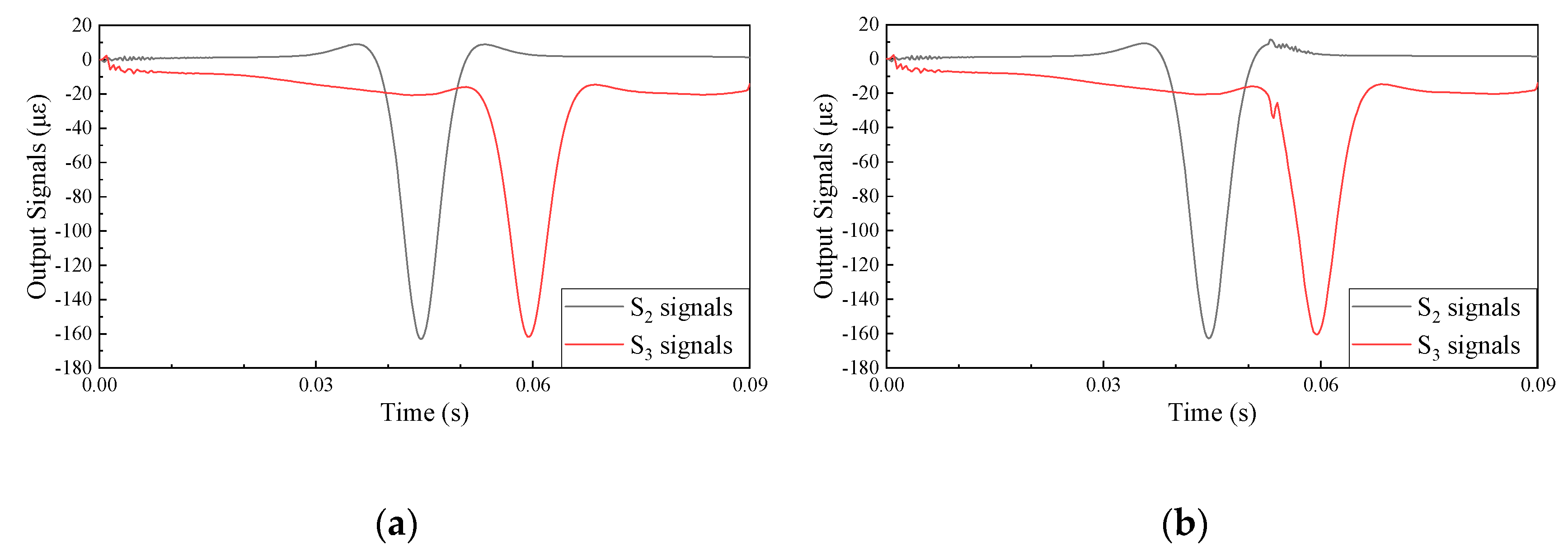
2.3.1. Design of Sensor Arrangement Spacing in the Longitudinal Direction
2.3.2. Comparison of Different Sensor Arrangement Plans
3. Wheel Flat Recognition and Positioning Algorithm Based on Multisensor Arrays
3.1. Design of the Algorithm
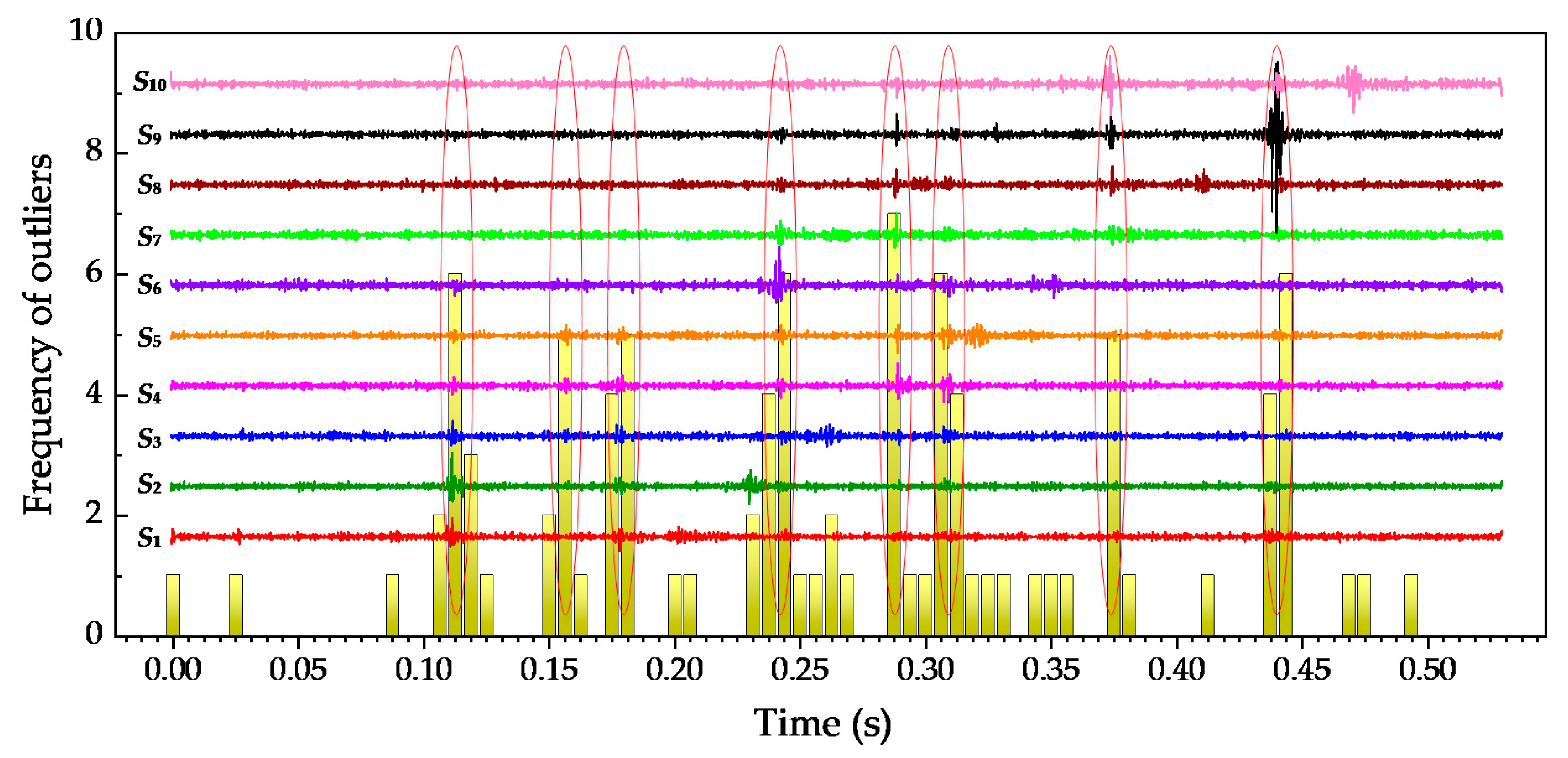
3.2. Step I: When the Abnormal Impacts Occurred
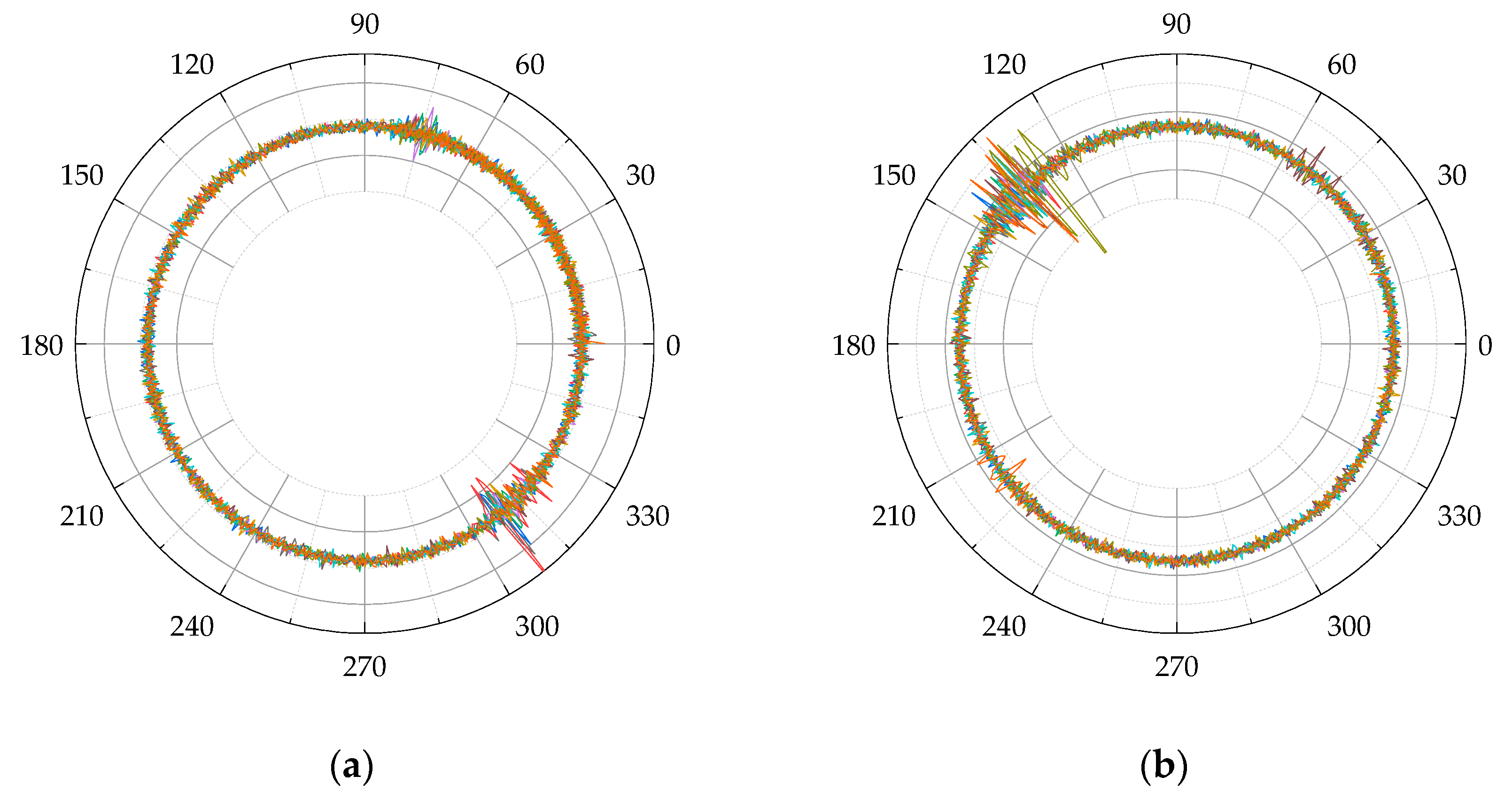
3.3. Step II: Where the Abnormal Impacts Occurred
3.4. Step III: Which Wheel is Responsible for the Abnormal Impact
4. Validation of the Algorithm
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jing, L. Wheel-rail impact by a wheel flat. In Modern Railway Engineering; Hessami, A., Ed.; IntechOpen: London, UK, 2018; pp. 31–49. [Google Scholar]
- Wu, B.; An, B.; Wen, Z.; Wang, W.; Wu, T. Wheel–rail low adhesion issues and its effect on wheel–rail material damage at high speed under different interfacial contaminations. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 5477–5490. [Google Scholar] [CrossRef]
- Esveld, C. Modern Railway Track; MRT-Productions: Zaltbommel, The Netherlands, 2014; pp. 71–74. [Google Scholar]
- Bian, J.; Gu, Y.; Murray, M.H. A dynamic wheel–rail impact analysis of railway track under wheel flat by finite element analysis. Veh. Syst. Dyn. 2013, 51, 784–797. [Google Scholar] [CrossRef] [Green Version]
- Zuo, J.; Wu, M. Research on anti-sliding control of railway brake system based on adhesion-creep theory. In Proceedings of the IEEE International Conference on Mechatronics & Automation, Xi’an, China, 4–7 Auguest 2010. [Google Scholar]
- Luo, R. Anti-sliding control simulation of railway vehicle braking. Chin. J. Mech. Eng. 2008, 44, 35–40. [Google Scholar] [CrossRef]
- Zhu, W.; Yang, D.; Huang, J. A hybrid optimization strategy for the maintenance of the wheels of metro vehicles: Vehicle turning, wheel re-profiling, and multi-template use. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2018, 232, 832–841. [Google Scholar] [CrossRef]
- Mok, H.; Chiu, W.K.; Peng, D.; Sowden, M.; Jones, R. Rail wheel removal and its implication on track life: A fracture mechanics approach. Theor. Appl. Fract. Mech. 2007, 48, 21–31. [Google Scholar] [CrossRef]
- Alemi, A.; Corman, F.; Lodewijks, G. Condition monitoring approaches for the detection of railway wheel defects. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2017, 231, 961–981. [Google Scholar] [CrossRef] [Green Version]
- Bosso, N.; Gugliotta, A.; Zampieri, N. Wheel flat detection algorithm for onboard diagnostic. Measurement 2018, 123, 193–202. [Google Scholar] [CrossRef]
- Ruipeng, G.; Chunyang, S.; Hang, J. A fault detection strategy for wheel flat scars with wavelet neural network and genetic algorithm. J. Xi’an Jiaotong Univ. 2013, 47, 88–91. [Google Scholar]
- Verkhoglyad, A.G.; Kuropyatnik, I.N.; Bazovkin, V.M.; Kuryshev, G.L. Infrared diagnostics of cracks in railway carriage wheels. Russ. J. Nondestruct. Test. 2008, 44, 664–668. [Google Scholar] [CrossRef]
- Cavuto, A.; Martarelli, M.; Pandarese, G.; Revel, G.M.; Tomasini, E.P. Train wheel diagnostics by laser ultrasonics. Measurement 2016, 80, 99–107. [Google Scholar] [CrossRef]
- Tsunashima, H. Condition monitoring of railway tracks from car-body vibration using a machine learning technique. Appl. Sci. 2019, 9, 2734. [Google Scholar] [CrossRef] [Green Version]
- Stratman, B.; Liu, Y.; Mahadevan, S. Structural health monitoring of railroad wheels using wheel impact load detectors. J. Fail. Anal. Prev. 2007, 7, 218–225. [Google Scholar]
- Liu, X.Z.; Ni, Y.Q. Wheel tread defect detection for high-speed trains using FBG-based online monitoring techniques. Smart Struct. Syst. 2018, 21, 687–694. [Google Scholar]
- Gao, R.; He, Q.; Feng, Q. Railway wheel flat detection system based on a parallelogram mechanism. Sensors 2019, 19, 3614. [Google Scholar] [CrossRef] [Green Version]
- Filograno, M.L.; Corredera, P.; Gonzalez-Herraez, M.; Rodriguez-Plaza, M.; Andres-Alguacil, A. Wheel flat detection in high-speed railway systems using fiber bragg gratings. IEEE Sens. J. 2013, 13, 4808–4816. [Google Scholar] [CrossRef]
- Filograno, M.L.; Rodriguez-Barrios, A.; Corredera, P.; Martin-Lopez, S.; Rodriguez-Plaza, M.; Andres-Alguacil, A.; Gonzalez-Herraez, M. Real time monitoring of railway traffic using Fiber Bragg Gratings. IEEE Sens. J. 2011, 12, 85–92. [Google Scholar] [CrossRef]
- Kundu, P.; Darpe, A.K.; Singh, S.P.; Gupta, K. A Review on Condition Monitoring Technologies for Railway Rolling Stock. In Proceedings of the European Conference of The Prognostics and Health Management Society 2018, Philadelphia, PA, USA, 24 September 2018. [Google Scholar]
- Brizuela, J.; Fritsch, C.; Ibáñez, A. Railway wheel-flat detection and measurement by ultrasound. Trans. Res. Part C Emerg. Technol. 2011, 19, 975–984. [Google Scholar] [CrossRef]
- Brizuela, J.; Ibañez, A.; Nevado, P.; Fritsch, C. Railway wheels flat detector using Doppler effect. Phys. Procedia 2010, 3, 811–817. [Google Scholar] [CrossRef] [Green Version]
- Salzburger, H.; Schuppmann, M.; Li, W.; Xiaorong, G. In-motion ultrasonic testing of the tread of high-speed railway wheels using the inspection system AUROPA III. Insight Non Destr. Test. Cond. Monit. 2009, 51, 370–372. [Google Scholar] [CrossRef] [Green Version]
- Bollas, K.; Papasalouros, D.; Kourousis, D.; Anastasopoulos, A. Acoustic emission inspection of rail wheels. J. Acoust. Emiss. 2010, 28. [Google Scholar]
- Amini, A.; Entezami, M.; Kerkyras, S.; Papaelias, M. Condition monitoring of railway wheelsets using acoustic emission. In Proceedings of the 10th International Conference on Condition Monitoring and Machinery Failure Prevention Technologies, Krakow, Poland, 7 June 2013. [Google Scholar]
- Weidemann, C. State-of-the-art railway vehicle design with multi-body simulation. J. Mech. Syst. Transp. Logist. 2010, 3, 12–26. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Zuo, M.J.; Lin, J.; Liu, J. Fault detection method for railway wheel flat using an adaptive multiscale morphological filter. Mech. Syst. Signal. Process. 2017, 84, 642–658. [Google Scholar] [CrossRef]
- Yan, W.; Fischer, F.D. Applicability of the Hertz contact theory to rail-wheel contact problems. Arch. Appl. Mech. 2000, 70, 255–268. [Google Scholar] [CrossRef]
- Wu, T.X.; Thompson, D.J. A hybrid model for the noise generation due to railway wheel flats. J. Sound Vibr. 2002, 251, 115–139. [Google Scholar]
- Milković, D.; Simić, G.; Jakovljević, Ž.; Tanasković, J.; Lučanin, V. Wayside system for wheel–rail contact forces measurements. Measurement 2013, 46, 3308–3318. [Google Scholar] [CrossRef]
- Zeng, S. Railway Track Dynamic Measurement Techniques; China Railway Publishing House: Beijing, China, 1988; pp. 46–61. [Google Scholar]
- Ying, S.; Yanliang, D.; Baochen, S. Application of piezoelectric sensing technology in real-time monitoring of wheel/rail interaction. J. Vibr. Shock 2010, 29, 228–232. [Google Scholar]
- Yuqing, Z.; Geming, Z.; Yan, Z.; Weidong, Y. Linear state method for continuous measurement of wheel/rail vertical force on ground. China Rail. Sci. 2015, 36, 111–119. [Google Scholar]
- Li, A.; Feng, M.; Li, Y.; Liu, Z. Application of outlier mining in insider identification based on Boxplot method. Procedia Comput. Sci. 2016, 91, 245–251. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Parameter | Value | Unit |
|---|---|---|---|
| Mass | Vehicle body | 33,593 | kg |
| Bogie | 3730 | kg | |
| Wheel | 1730 | kg | |
| Moment of inertia | Vehicle body (around x/y/z axis) | 50,000/1,101,000/1,099,000 | kg·m2 |
| Bogie (around x/y/z axis) | 1194/876/2099 | kg·m2 | |
| Wheel (around x/y/z axis) | 1042/137/1042 | kg·m2 | |
| Stiffness | Primary suspension (longitudinal/lateral/vertical) | 17.62 × 106/9.62 × 106/5.35 × 106 | N/m |
| Secondary suspension (longitudinal/lateral/vertical) | 0.16 × 106/0.16 × 106/0.35 × 106 | N/m | |
| Damping | Secondary suspension (lateral) | 5000 | N·s/m |
| Secondary suspension (vertical) | 5000 | N·s/m |
| Impact Processes | Impact Position | Middle Time/s | Front Wheel Position/m | Rear Wheel Position/m | Responsible Wheel |
|---|---|---|---|---|---|
| IMP1 | 0.6~1.2 m | 0.109375 | 1.1225 | −1.1725 | Front wheel |
| IMP2 | 1.8~2.4 m | 0.153125 | 1.9975 | −0.2975 | Front wheel |
| IMP3 | 0~0.6 m | 0.178125 | 2.4975 | 0.2025 | Rear wheel |
| IMP4 | 3.6~4.2 m | 0.240625 | 3.7475 | 1.4525 | Front wheel |
| IMP5 | 4.2~4.8 m | 0.284375 | 4.6225 | 2.3275 | Front wheel |
| IMP6 | 2.4~3 m | 0.303125 | 4.9975 | 2.7025 | Rear wheel |
| IMP7 | 6.4~7 m | 0.371875 | 6.4975 | 4.2025 | Front wheel |
| IMP8 | 5.4~6 m | 0.440625 | 7.7475 | 5.4525 | Rear wheel |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, C.; Gao, L.; Xiao, H.; Hou, B. Railway Wheel Flat Recognition and Precise Positioning Method Based on Multisensor Arrays. Appl. Sci. 2020, 10, 1297. https://doi.org/10.3390/app10041297
Zhou C, Gao L, Xiao H, Hou B. Railway Wheel Flat Recognition and Precise Positioning Method Based on Multisensor Arrays. Applied Sciences. 2020; 10(4):1297. https://doi.org/10.3390/app10041297
Chicago/Turabian StyleZhou, Chenyi, Liang Gao, Hong Xiao, and Bowen Hou. 2020. "Railway Wheel Flat Recognition and Precise Positioning Method Based on Multisensor Arrays" Applied Sciences 10, no. 4: 1297. https://doi.org/10.3390/app10041297
APA StyleZhou, C., Gao, L., Xiao, H., & Hou, B. (2020). Railway Wheel Flat Recognition and Precise Positioning Method Based on Multisensor Arrays. Applied Sciences, 10(4), 1297. https://doi.org/10.3390/app10041297