In this paper, two periodic signals with different frequency components are selected, and , then the white noise with the SNR of −5, 1, 5 and 20 db and obeying the Gaussian distribution N (0, 1) is respectively added in two periodic signals.
3.1. The Optimal Model of MRSVD
Using different parameters, MRSVD will have different forms, and not all noise reduction models have good effects. Therefore, it is necessary to make a discussion on various models to select the optimal model. In this paper, the different values of the decomposition method L, the decomposition type N and the decomposition layer M are used as variables to draw the relationship curve between two evaluation indicators (SNR, MSE) and the number of decomposition layers in the two-division method, the three-division method, and the four-division under different decomposition types. The optimal model of MRSVD is selected by the specific analysis on the change trend of SNR curve and the MSE curve.
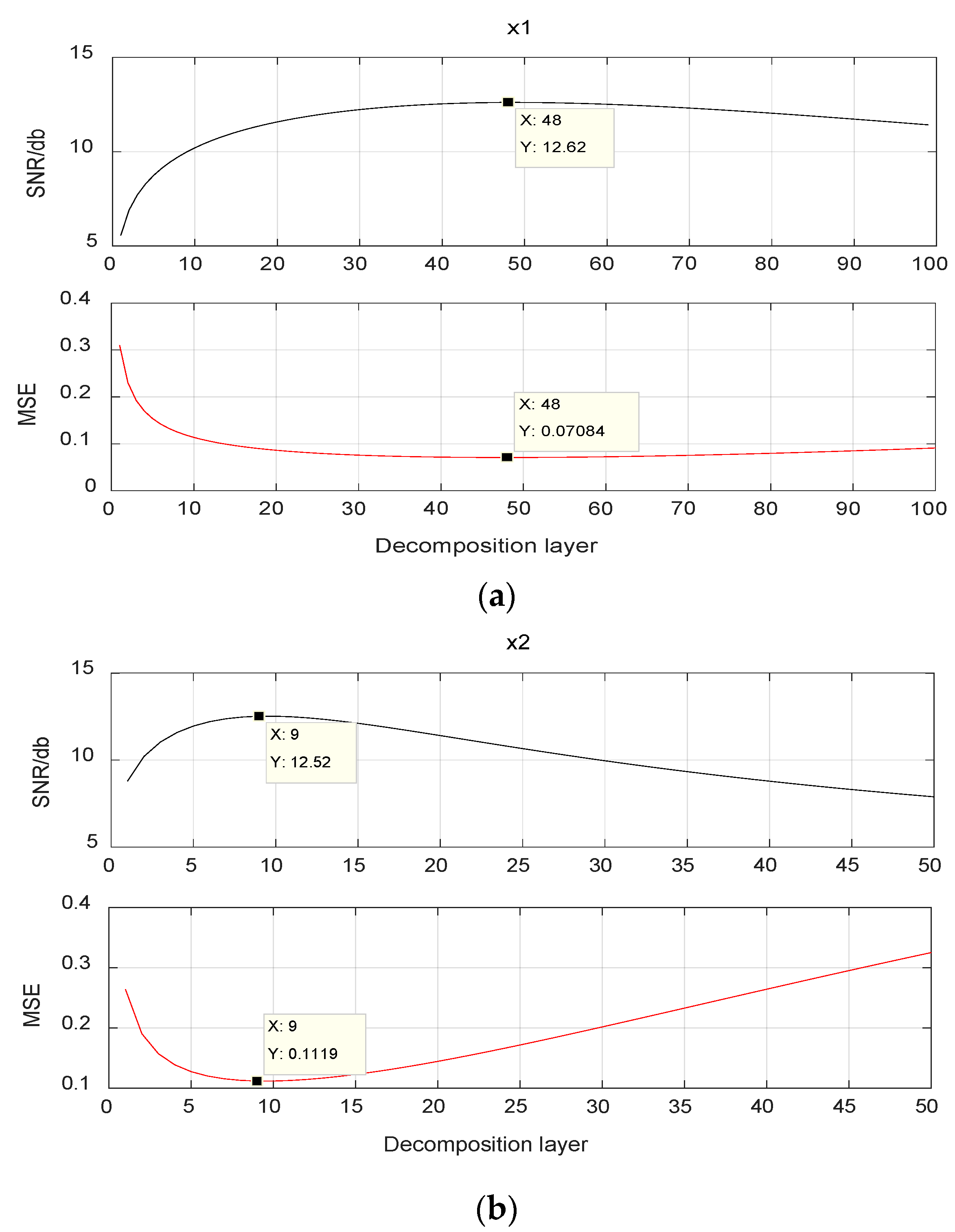
Figure 3 is the SNR and MSE curves in the two-division method at an initial SNR of 1 db, where (a) is the curve for
and (b) is the curve for
.
It can be seen from
Figure 3a,b that
and
reach the peak SNR at M = 48 and 9, respectively, and the value of MSE just reaches the minimum value. By observing the curve, it can be seen that the initial growth of the SNR curve is faster, then slows down gradually, and begins to decrease after reaching the peak SNR. This is because most of the noise signal is separated into the detail signal at the beginning, and the original signal is basically retained as an approximation signal, so the SNR rises very quickly. When the SNR becomes large, the noise power is already quite small. At this time, the separated noise will inevitably be mixed with some of the original signals, resulting in a decrease in SNR. This is consistent with the principle of noise reduction. An increase on the MSE value indicates that the amplitude of the original signal
is already bigger than the noise-reduced signal
, and the original signal has been excessively separated into the detail signal. If the decomposition continues, the signal distortion will become more and more serious, and this should be avoided during the noise reduction process.
Figure 4 is the SNR and MSE curve in the three-division method at an initial SNR of 1 db, where (a) is the curve for
and (b) is the curve for
.
It can be seen from
Figure 4a,b that the three-division method has two types of decomposition: N = 1 and N = 2. For the three-division method, regardless of the value of decomposition type N of the signal x1 or x2, its SNR reaches the maximum value when M = 1. The SNR curve shows a downward trend and a negative value occurs. If the SNR is negative, then the original signal power is less than the noise power, it shows that the three-division method separates too much of the original signal, which is seen noise wrongly, into the detail signal, that is, the power of the original signal is leaked into the noise, and the signal is severely distorted. It is observed that the value of the MSE increases while the SNR decreases, indicating that the power of the original signal is getting smaller and smaller, which also means that the accuracy of the reconstructed signal after decomposition is gradually degraded as the number of decomposition layers increases.
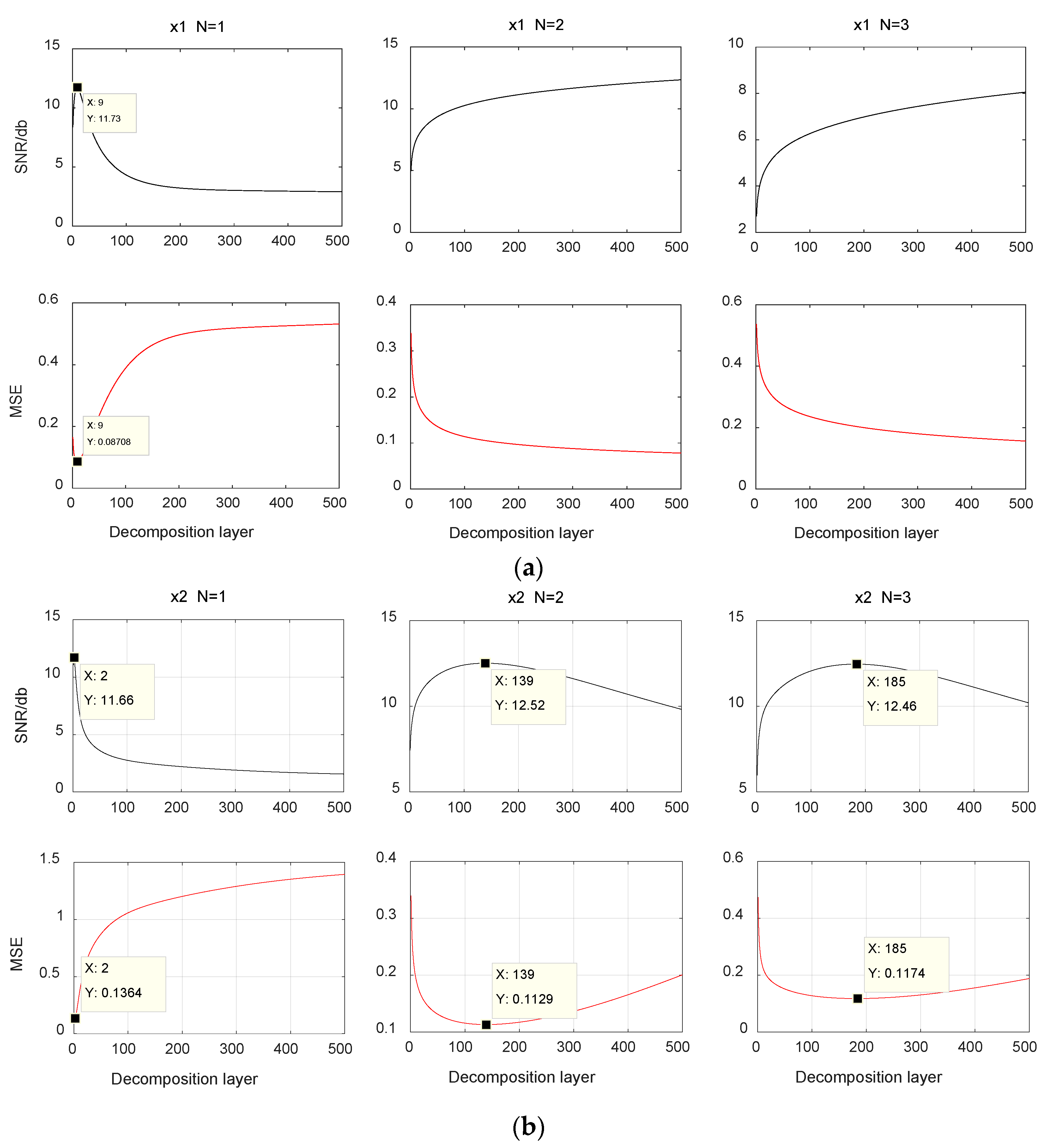
Figure 5 is the SNR and MSE curve in the four-division method at an initial SNR of 1 db, where (a) is the curve for x1 and (b) is the curve for x2. It can be seen from
Figure 5a,b that the four-division method has three decomposition types. When N = 1, the SNR of signal x1 increases first and then decreases gradually, and the SNR of x2 has the trend of decreasing, reaching maximum at M = 9 and M = 2 respectively; while N = 2 and N = 3, the SNR has been increasing until M = 500, and the curve becomes very gentle after the number of decomposition layer reach to 500, which indicates that the larger the value of N, the less noise is separated from each layer, and the lower the efficiency of noise reduction. Comparing the peak SNR and minimum MSE of three decomposition types, it can be seen that it has the best decomposition effect when N = 2.
Due to space limitations, the SNR and MSE obtained by adding the white noise with the SNR is respectively −5, 5 and 20 db are given in the tables below.
Table 1 lists the SNR under different noise reduction models,
Table 2 shows the MSE values, and
Table 3 shows the optimal decomposition layers.
When the noise power is much smaller than the original signal (20 db), the following is satisfied:
The noise reduction effect of the three-division method is inferior to the two-division method and the four-division method, because the power leakage of the three-division method is more serious when it is decomposed. In fact, when the number of division of decomposition method is even, the effect is always better than that is odd. The SNR of the four-division method is slightly higher than the two-division method in the case of low noise power, but it has obvious drawbacks. Its decomposition layer is obviously much higher than the two-division method, and the noise reduction efficiency is significantly lower than that of the two-division method. Before the peak SNR is reached, the SNR of the two-division method is higher than the four-division under the same decomposition layer.
When the initial SNR is 20 db, the power of the original signal is about 100 times that of the noise. At this time, the influence on the signal by increasing the SNR is very small, and the rate of noise reduction should be taken as the main consideration. The optimal decomposition layers of signal x1 and x2 decomposed by the two-division method is seven and one layers, respectively, while for the four-division method, it is 1755 and 15 layers. In this case, the noise reduction speed of the two-division method is much higher than that of the four-division method.
For the multi-division method of L > 2 (L is even), there is also the same problem as the four-division method, and the larger the L, the lower the noise reduction speed, which obtained a better SNR and MSE by sacrificing the speed of noise reduction. In actual engineering applications, there are requirements for noise reduction efficiency. Considering the actual situation, the accuracy cannot be simply pursued, and the noise reduction speed must also be considered. The two-division method can achieve booth higher precision and speed in most cases, so it can be considered that the two-division method is the optimal noise reduction model in MRSVD.
3.2. Comparison among Multiple Models
In order to test the noise reduction effect of MRSVD (The two-division method), this paper selects EMD, EEMD, VMD, SVD, wavelet decomposition and the two-division method for comparative analysis. Among them, EMD, EEMD, and VMD decompose the signal into multi-order intrinsic mode function (IMF) in the case of selecting optimal parameters, and the components with severe modal aliasing are discarded and reconstruct the remain component; Wavelet decomposition is to select the db3 wavelet as the wave obtained by decomposing and reconstructing the fundamental wave; SVD is to reconstruct the signal by making the order of the effective rank to be twice the number of signal center frequency. The wave obtained by the above several noise reduction models are all obtained under the optimal parameters, and the wave decomposed by MRSVD are also the results obtained by selecting the number of optimal decomposition layer based on the optimal model.
Figure 6 and
Figure 7 show the noise reduction results of two experimental signals at 1 db using several models. As shown these figures, the black curve shows the waveform of the original signal. It can be seen that the waveforms of EMD, EEMD, VMD, SVD and wavelet decomposition differ from the original signal under different signals. For signal
, the deviation between the waveform of EMD and VMD and the original signal is the largest, and the deviation between the waveform of SVD and MRSVD is smaller comparing with the original signal. For signal
, the deviation of the EMD and wavelet decomposition waveform from the original signal is the largest, the waveforms of SVD and MRSVD have less deviation from the original signal. In general, these noise reduction models have their own advantages, but only MRSVD has the highest coincidence with the original signal. Moreover, it can suppress the modal aliasing of noise signal, and basically reflect the number of center frequencies of the original signal.
Figure 6 and
Figure 7 are the noise reduction waveforms at the same noise power. To compare the noise reduction effects in various models under different noise powers, this paper evaluates the two experimental signals by their SNR and MSE. The specific results are shown in
Table 4 and
Table 5.
It can be seen from
Table 4 and
Table 5 that when the noise power is large, EMD, EEMD, VMD, and wavelet decomposition are obviously not as good as the MRSVD for the improvement of the SNR. For signal
, the noise reduction effect of EMD is not even better than before at 20 db, although the SNR of EEMD is slightly higher than MRSVD in this case, the MSE is still large overall. In most cases, MRSVD has a higher SNR, and MRSVD has a smaller MSE than other methods. This shows that the MRSVD has a good noise reduction effect and a more stable performance.
In order to more intuitively see the decomposition effects of several models under different noise powers, the trends of the SNR and the MSE of several models under different noise powers are made for the experimental signals and , respectively.
As shown in
Figure 8, it can be clearly found that the SNR of MRSVD is always at the maximum value in the whole range, and the MSE is basically the minimum value, and when the noise power is larger, the advantage of MRSVD is more obvious than other methods, this is consistent with the results reflected in the noise-reduced waveforms in
Figure 6 and
Figure 7. In summary, MRSVD has better results in signal noise reduction than other methods.
3.3. Instance Verification
This paper takes the rolling bearing experiment of Case Western Reserve University as an example to diagnose the fault bearing. The bearing used in the experiment is 6205-2RS JEM SKF deep groove ball bearing, the motor power is 2 HP, the rotating frequency is 1730 r/min, the sampling frequency is 12 KHz, and the number of sampling points is 1024. Without affecting the normal service performance of the bearing, a small groove with a diameter of 0.007 inches is machined on the bearing outer ring to simulate a local bearing crack, the acceleration sensor at the driving end collects the signals of the bearing outer ring.
The formula for calculating the defect frequency of outer ring of rolling bearing is:
It can be calculated from Equation (6), where Z is the number of rolling elements, d is the diameter of rolling elements, D is the pitch diameter,
is the contact angle of bearing, and is the rotation frequency. The signal and power spectrum of the bearing outer ring during faulty operation are shown in
Figure 9.
It can be seen from
Figure 9 that the signal time-domain waveform is very complex, and it is difficult to see the existence of periodic shock. From the frequency domain, the frequency band is mainly distributed in the middle frequency band, and it is difficult to determine the occurrence of shock.
MRSVD is used to decompose this signal into 5 layers, and the results are shown in
Figure 10. It can be seen that in the detail signal, especially in the first two detailed signals, a very obvious periodic impact was obtained. Based on this, it can be determined that the bearing’s raceway is damaged. However, since the damage is not serious, the impact in the original signal is not obvious and it is difficult to confirm.
In order to more clearly and intuitively see the frequency of outer ring faults, an envelope spectrum analysis is required. The above-mentioned decomposition methods are used to process the outer ring vibration signal of the rolling bearing, and the component with the largest kurtosis value is selected for envelope spectrum analysis to obtain
Figure 11.
Table 6 shows the component selection when the kurtosis of each model is maximum.
As shown in
Figure 11, it can be seen that several signal processing methods approximately locate the outer ring defect frequency of the bearing at 105.5 hz (theoretical value is 107.36 hz), EMD and VMD at the basic frequency, EEMD at the second octave, wavelet decomposition, SVD and MRSVD not only at the basic frequency but also at the seventh octave. The occurrence of high-order harmonics may be the asymmetry or looseness of the inner and outer rings in the bearing Situation. Although the amplitude of the basic frequency extracted by other methods is large, it is still greatly disturbed by noise. Only the envelope spectrum of MRSVD effectively reduces the noise interference, highlights the impact characteristics of the fault, and has the highest diagnosis accuracy. In conclusion, MRSVD can be used to accurately identify the fault type of bearing after noise reduction.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}