1. Introduction
The gear system is one of the most important transmission mechanisms and is commonly used in gas turbines, automotives, generators, electrical products, and aerospace applications. The geared rotor system is the main source of vibration problems in power transmission systems. Rotor dynamics analysis is extremely important in the above-mentioned fields of application involving the design of vibrating machinery. Therefore, a more realistic dynamic model of the helical-geared rotor-bearing system for prediction of the vibration response is necessary.
Many researchers have analyzed the dynamics of the gear pair system. Lalanne and Ferraris [
1] predicted the dynamic behavior of rotors in bending and in torsion. They also discussed the influence of bending, and the possible instabilities were determined. Umezawa et al. [
2] proposed a simulator which solves a differential equation with one degree of freedom in measuring the effects of the stiffness around tooth tip meshing, which facilitates deriving a profile of a spur gear that decreases vibration. Kahraman and Singh [
3] used the harmonic balance method to develop a frequency response solution to the gear pair. Kahraman and Singh [
4] also explored the nonlinear correlation between the radial clearance and the backlash between the spur gear pair in radial rolling bearing. They assumed that the gear meshing stiffness is linear and does not change with time. Huang and Liu [
5] simulated the spur gear teeth action with a variable section Timoshenko beam. They subjected the gear pair to dynamic analysis with nonlinear contact stiffness.
Kahraman [
6] developed a linear dynamic model of a helical gear pair which has been used to investigate the effects of the helix angle on the free and forced vibrational characteristics of the gear pair. Kubur et al. [
7] proposed a dynamic model of a multi-shaft helical gear which could enable designers to predict the dynamic behavior of the system and provide the most advantageous configuration for optimal dynamic behavior. Zhang et al. [
8] developed two-gear dynamic models, one with twelve degrees of freedom and the other with a multi-shaft geared rotor system. Bozca [
9] investigated the helix angle effect on the helical gear-load carrying capacity. Both the overlap contact ratio and total contact ratio were calculated by changing the helix angle.
About forty years ago, a specific numerical calculation procedure, the finite element method (FEM), which provides more accurate modeling, was used for analyzing geared rotor-bearing systems. Nelson [
10] used the Timoshenko beam theory and the finite element method to calculate the effect of shear deformation and rotatory inertia. Kahraman et al. [
11] developed a finite element model of a spur-geared rotor system supported with flexible bearings. The model included the rotary inertia of shaft elements, flexibility and damping of bearings, material damping of shafts, and stiffness and damping of the gear mesh. However, their model did not consider the effect of the gear pair pressure angle. Shiau et al. [
12] analyzed the coupled bending and torsional vibrations of geared rotors as well as the effect of axial torque on bending vibrations. Choi and Mau [
13] employed a transfer matrix model to determine the coupled bending–torsional natural frequencies and mode shapes of a spur-geared rotor-bearing system. Steady-state responses due to excitation of mass imbalance, geometric eccentricity, and gear mesh transmission error were also investigated. Chen [
14] discussed the dynamic responses of a double-stage geared rotor-bearing system with translational motion due to the rotating shaft deformation. The proposed model considers contact ratio and pressure angle of the gear pair as time-dependent variables, whereas in other models, they are constants. Prabel [
15] investigated the application of time integration methods to rotor-stator assembly modeled. Both the average acceleration method and the central differences method were used to discuss numerical instability.
Gears have been widely used in industrial applications over the years, taking into account that time-varying variables or time-varying gear mesh stiffness could improve gear system accuracy. Ozguven and Houser [
16] approximated time-varying mesh stiffness by using a constant mesh stiffness with a transmission error excitation. Kim et al. [
17] developed a new dynamic model of the spur gear pair which considered the pressure angle and contact ratio as time-varying. Saxena et al. [
18] discussed the effect of the time-varying friction coefficient on the total effective mesh stiffness for the spur gear pair and indicated that the gear mesh stiffness changed due to the change in direction of the time-varying friction on both sides of the pitch line. A time-varying mesh stiffness model of the helical gear pair, including axial tooth torsional stiffness, tooth bending stiffness, and gear foundation stiffness, was developed by Wang et al. [
19]. In an analysis of the spur gear pair dynamics system, Yi et al. [
20] considered that both the pressure angle and the backlash change over time.
Although some nonlinear factors have been incorporated into the dynamic analysis of the gear system, few studies have considered the time-varying behavior in nonlinear dynamic modeling. There have been some studies on the time-varying meshing of the spur gear pair [
18] and helical gear pair [
19], the time-varying dynamic characteristics of the spur gear pair [
17,
20], and the spur-geared rotor-bearing system [
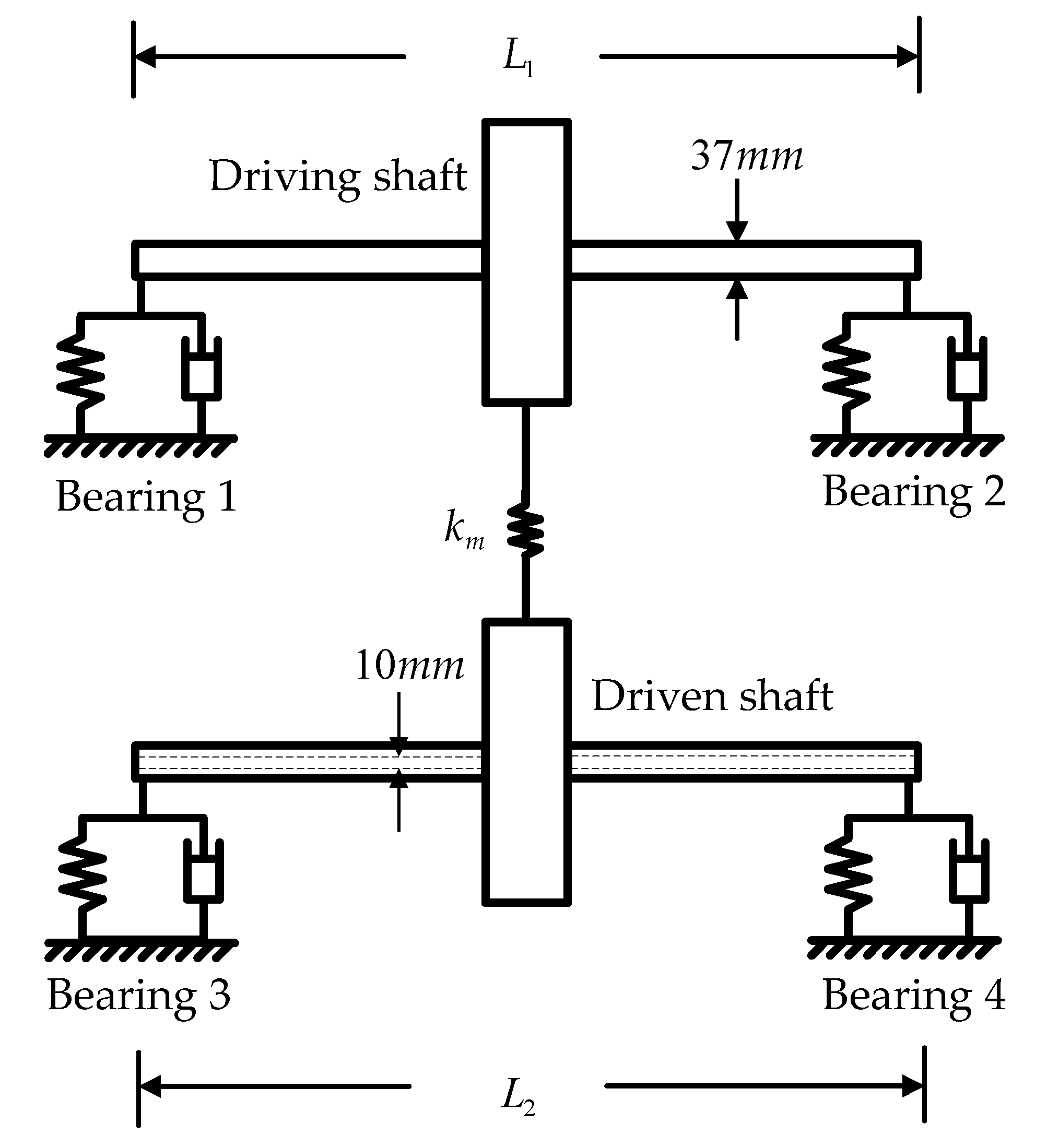
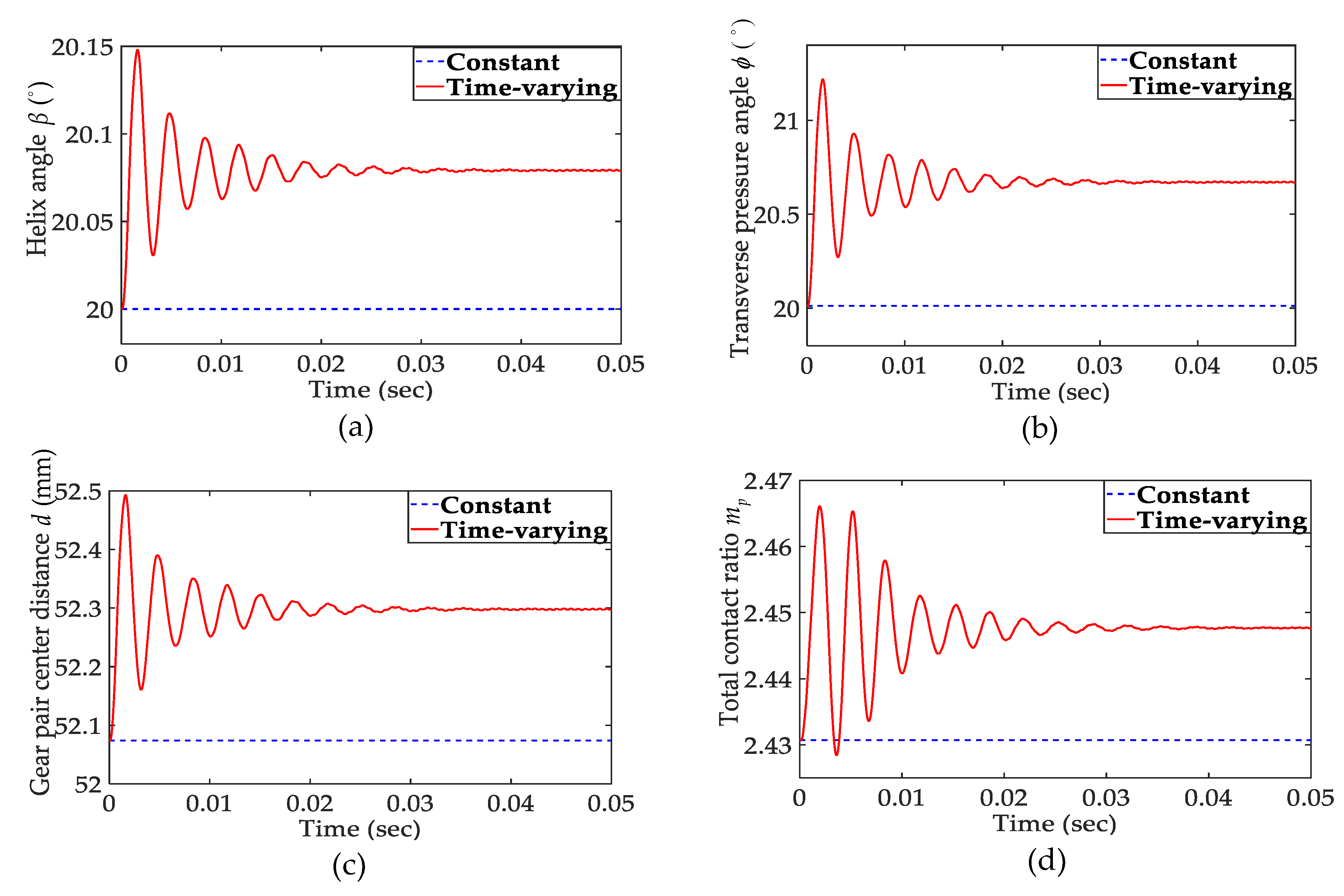
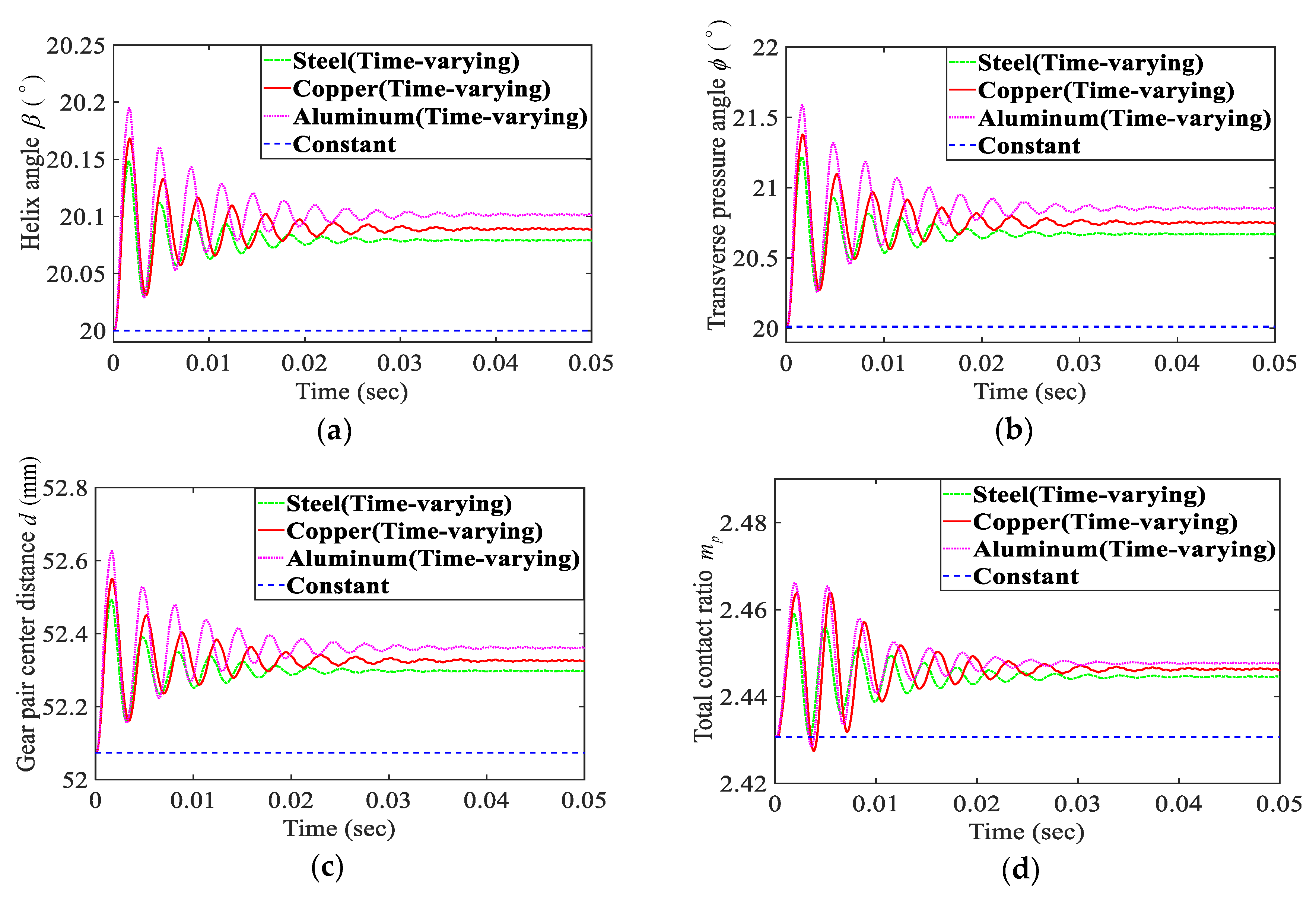
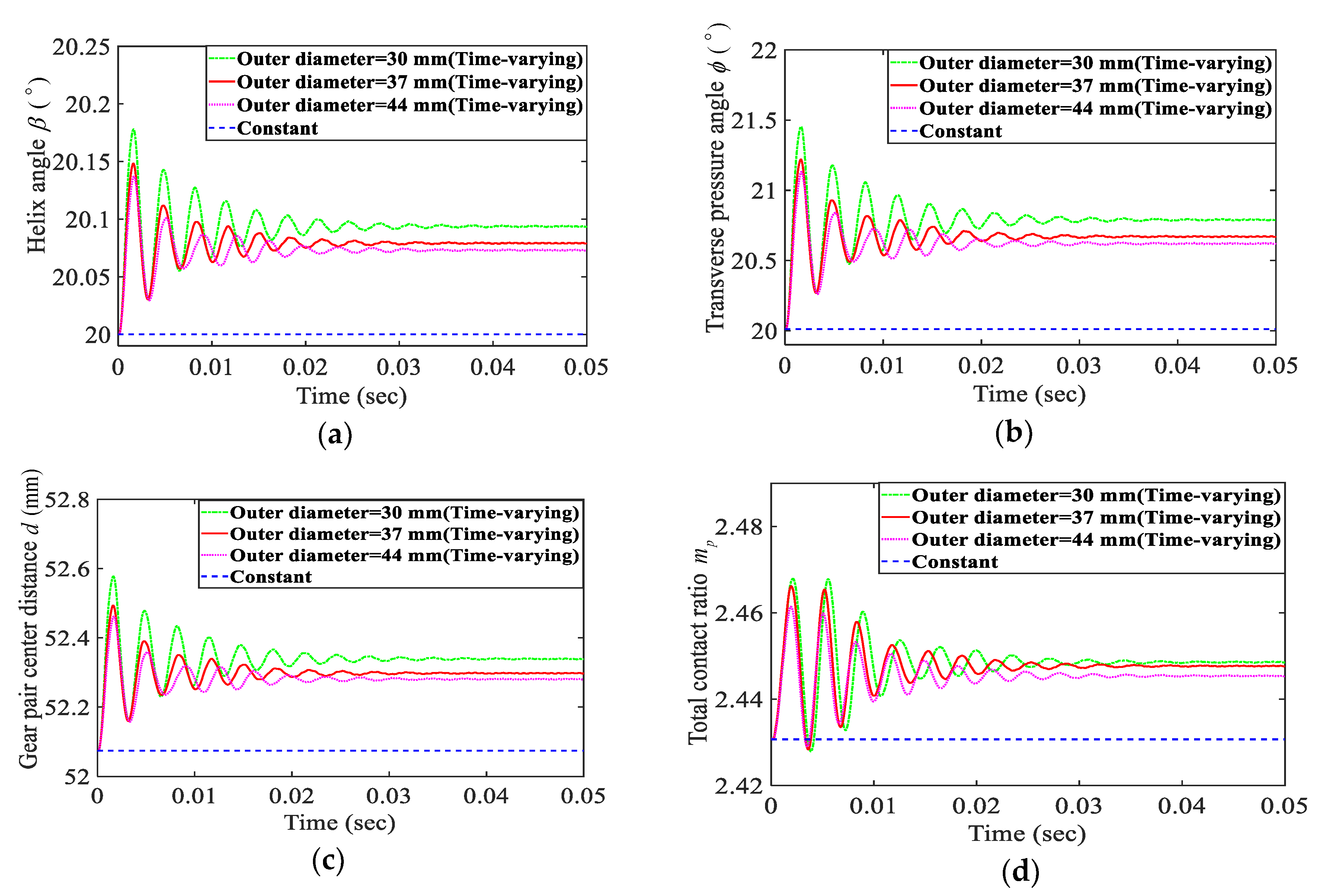
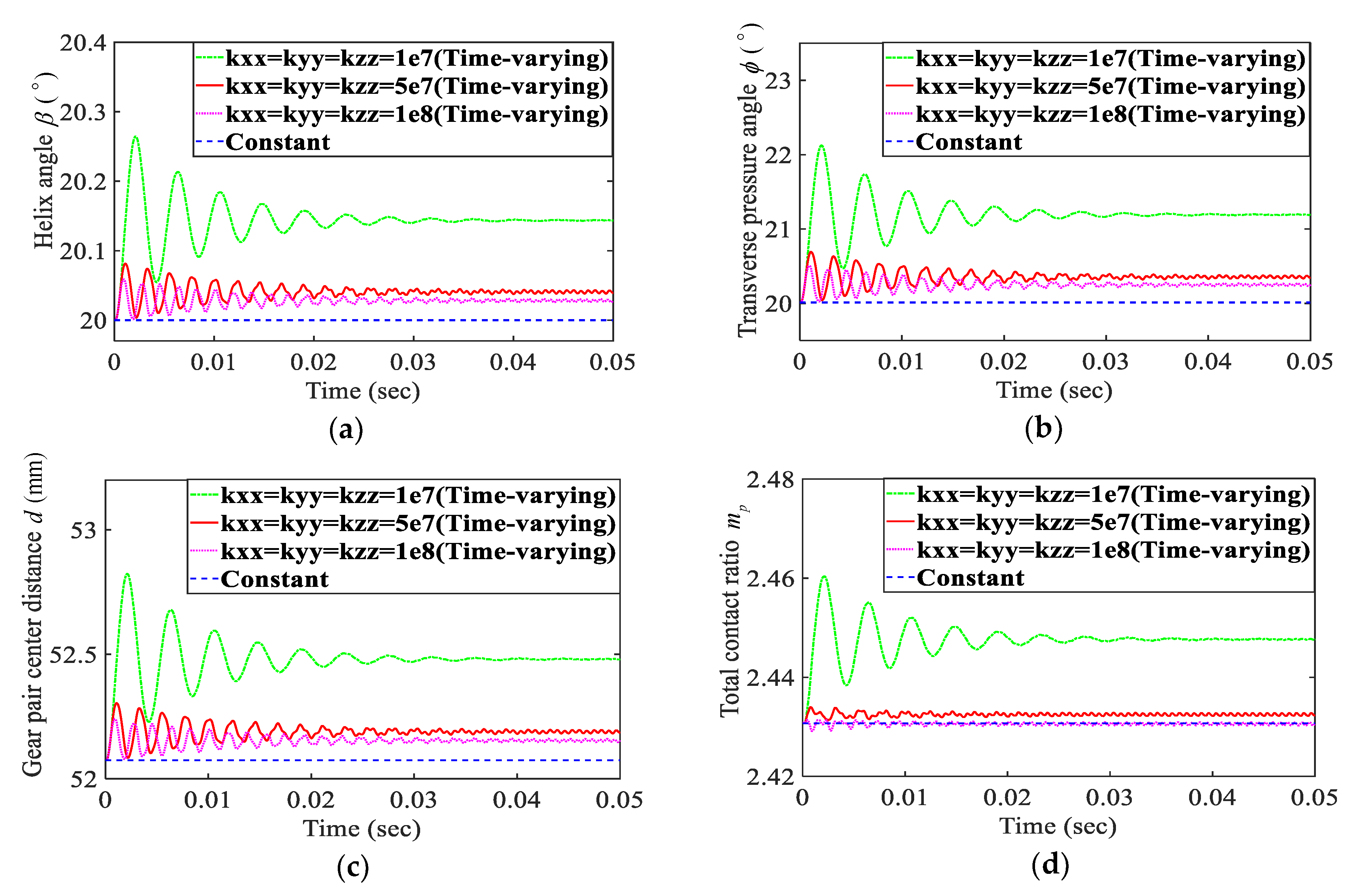
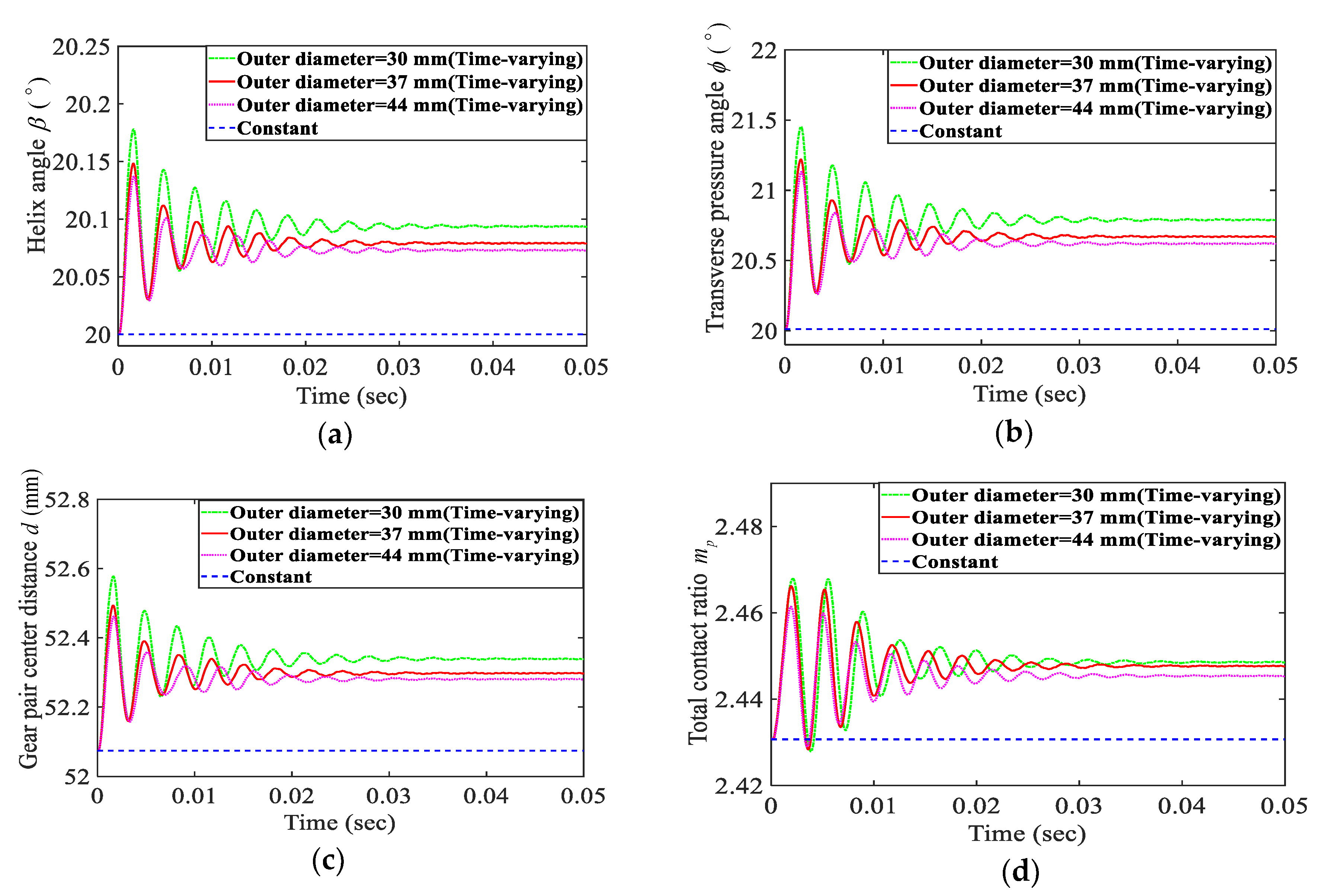
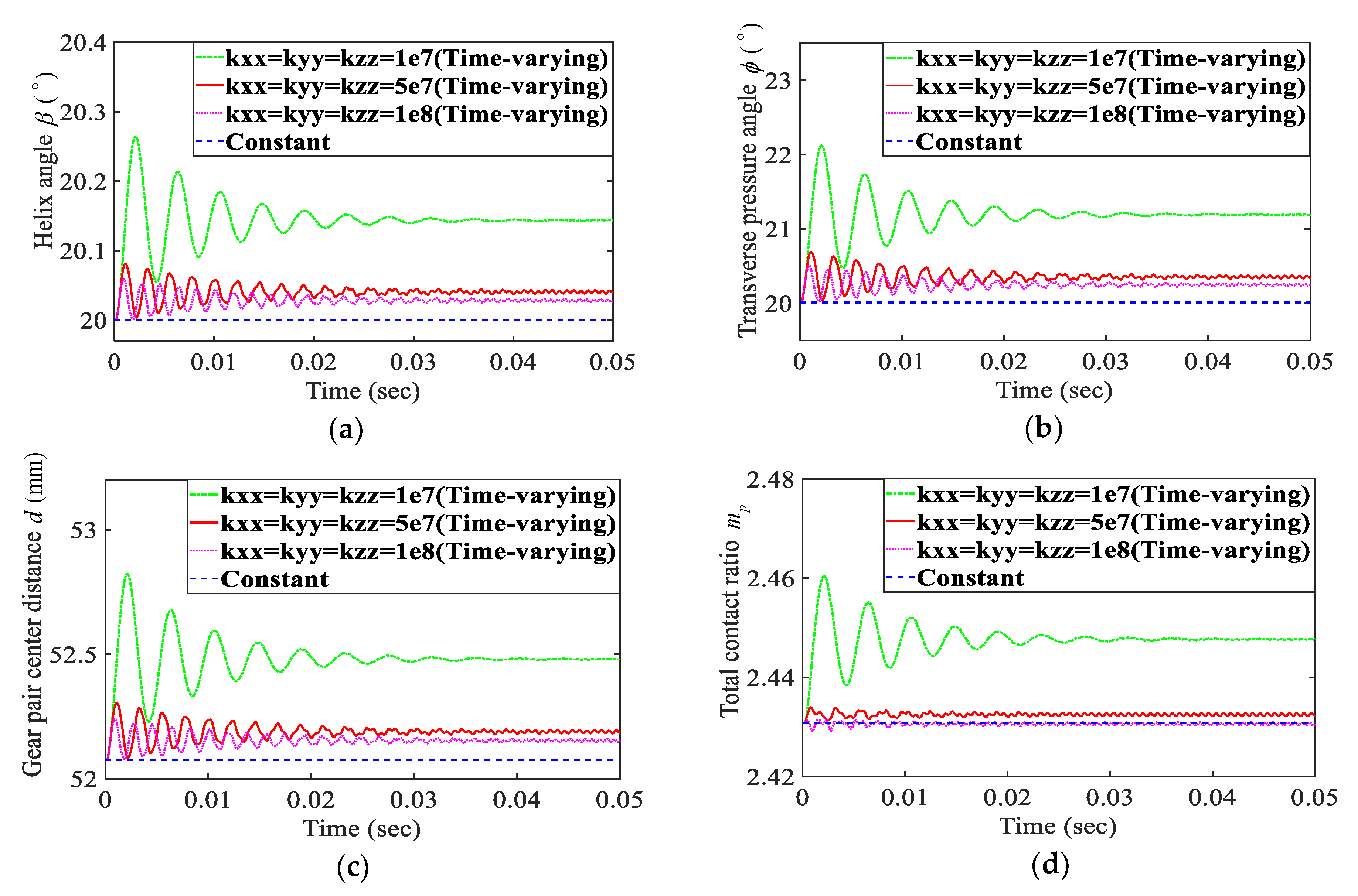
14]. However, the dynamic characteristics of a helical-geared rotor-bearing system with time-varying effects have not been studied. In general, in nonlinear dynamic model analysis of the helical-geared rotor-bearing system, in order to facilitate modeling, previous studies have regarded the gear pair center distance, helix angle, and gear contact ratio as constants. In fact, when the gear pair has translational motion due to rotating shaft deformation, the center distance of the gear pair will change, which will then cause changes in the line of action, helix angle, and contact ratio. This study introduces a novel dynamic model for a helical-geared rotor-bearing system with 3-D (3-dimensional) motion due to rotating shaft deformation, which includes the time-varying dynamic characteristics of the helix angle, transverse pressure angle, gear pair center distance, and total contact ratio.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}