Analysis of Movement Law and Influencing Factors of Hill-Drop Fertilizer Based on SPH Algorithm


Abstract
:1. Introduction
2. Methodology
2.1. Hill-Drop Fertilizer Device
2.2. Fertilizer Motion Simulation
- The time of displacement change was short, and it remained stable 0.3 s after the start of disturbance. The main reason was that under the limitation of the cover, the soil discharged by the opener cannot continue to move to both sides. The opener accelerated the soil backflow and shortened the time of fertilizer movement;
- In the planter’s forward direction, the fertilizer displacement in the upper layer was larger, the fertilizer displacement in the lower layer was smaller, and the trend of fertilizer displacement was decreasing from top to bottom. The main reason was that the cover increased the disturbance of the upper soil;
- In the vertical direction, all of the fertilizer moved downward, and the falling displacement was close. It is mainly affected by gravity, which caused the fertilizer to move downwards;
- In the direction perpendicular to the planter’s forward direction, the direction of fertilizer displacement on both sides of the opener was opposite, and it all moved toward the opener with smaller displacement. It was mainly squeezed by the surrounding soil and moved towards the ditch.
2.3. Analysis of Effluence Factors
2.4. Fertilizer Distribution Detection
3. Results and Discussion
3.1. Fertilizer Offset Distance
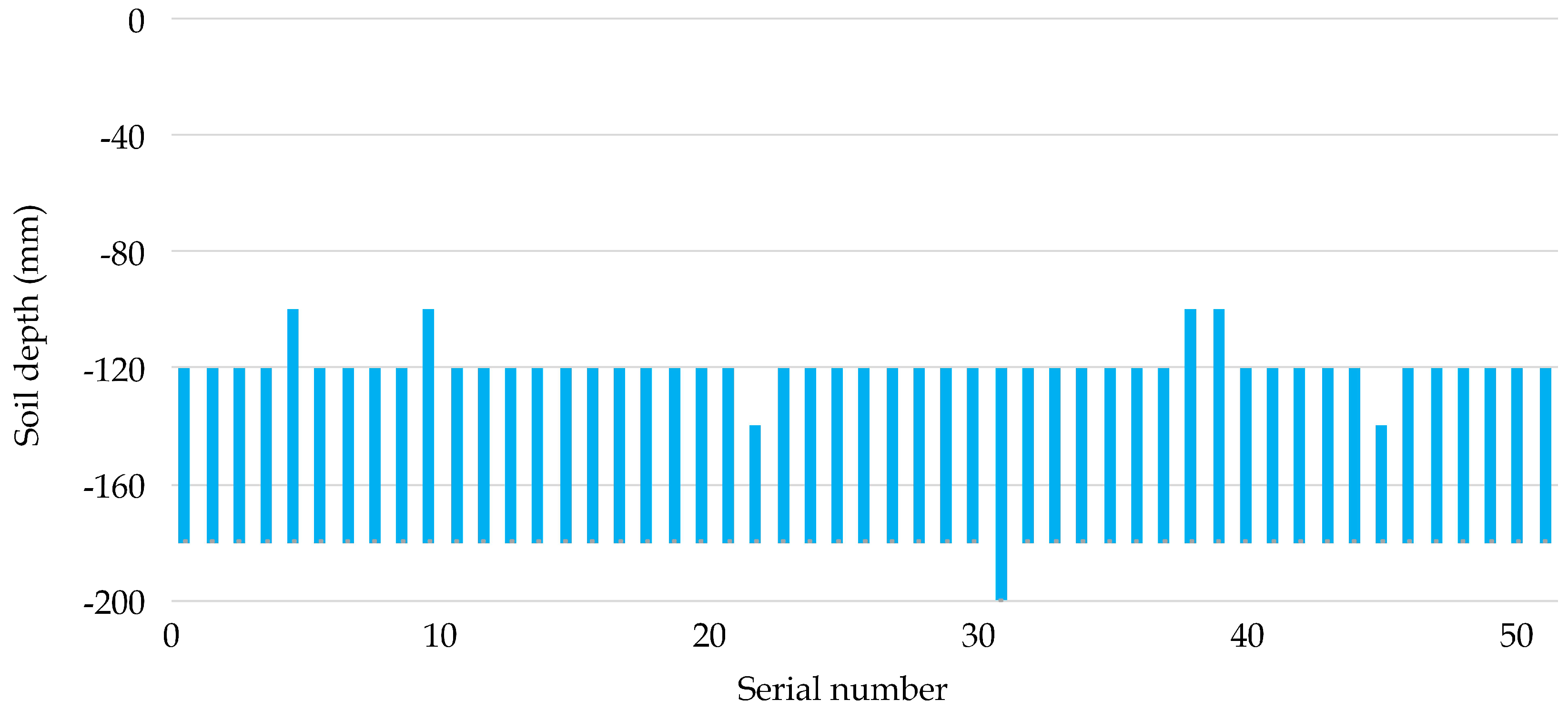
3.2. Fertilizer Depth
3.3. Comparison and Analysis of Simulation and Experiment Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Oyebiyi, F.B.; Aula, L.; Omara, P.; Nambi, E.; Dhillon, J.S.; Raun, W.R. Grain yield response to methods of nitrogen fertilization. Commun. Soil Sci. Plant Anal. 2019, 50, 2694–2700. [Google Scholar] [CrossRef]
- Sweeney, D.W.; Ruiz-Diaz, D.; Jardine, D.J. Nitrogen management and uptake by corn on no-till and ridge-till claypan soil. Agrosyst. Geosci. Environ. 2018, 1. [Google Scholar] [CrossRef] [Green Version]
- Shiferaw, B.; Prasanna, B.M.; Hellin, J.; Bänziger, M. Crops that feed the world 6. Past successes and future challenges to the role played by maize in global food security. Food Secur. 2011, 3, 307–327. [Google Scholar] [CrossRef] [Green Version]
- Wu, N.; Lin, J.; Li, B. Design and test on no-tillage planter precise hole fertilization system. Trans. Chin. Soc. Agric. Machin. 2018, 49, 64–72. [Google Scholar]
- Liu, Z.; Wang, Q.; Liu, C.; Li, H.; He, J.; Liu, J. Design and experiment of precision hole-fertilizing apparatus with notched plate. Trans. Chin. Soc. Agric. Machin. 2018, 49, 137–144. [Google Scholar]
- Li, M.; Wen, X.; Zhou, F. Working parameters optimization and experiment of precision hole fertilization control mechanism for intertilled crop. Trans. Chin. Soc. Agric. Machin. 2016, 47, 37–43. [Google Scholar]
- Mouazen, A.M.; Nemenyi, M. Finite element analysis of subsoiler cutting in non-homogeneous sandy loam soil. Soil Tillage Res. 1999, 51, 1–15. [Google Scholar] [CrossRef]
- Shmulevich, I. State of the art modeling of soil–tillage interaction using discrete element method. Soil Tillage Res. 2010, 111, 41–53. [Google Scholar] [CrossRef]
- Ucgul, M.; Saunders, C.; Fielke, J.M. Discrete element modelling of tillage forces and soil movement of a one-third scale mouldboard plough. Biosyst. Eng. 2017, 155, 44–54. [Google Scholar] [CrossRef]
- Barr, J.B.; Ucgul, M.; Desbiolles, J.M.A.; Fielke, J.M. Simulating the effect of rake angle on narrow opener performance with the discrete element method. Biosyst. Eng. 2018, 171, 1–15. [Google Scholar] [CrossRef]
- Wang, Y.; Liang, Z.; Cui, T.; Zhang, D.; Qu, Z.; Yang, L. Design and experiment of layered fertilization device for corn. Trans. Chin. Soc. Agric. Machin. 2016, 47, 163–169. [Google Scholar]
- Gao, J.; Zhou, P.; Zhang, B.; Li, F. Development and test of high speed soil-cutting simulation system based on smooth particle hydrodynamics. Trans. Chin. Soc. Agric. Eng. 2007, 23, 20–26. [Google Scholar]
- Pastor, M.; Haddad, B.; Sorbino, G.; Cuomo, S.; Drempetic, V. A depth-integrated, coupled SPH model for flow-like landslides and related phenomena. Int. J. Numer. Anal. Methods Geomech. 2009, 33, 143–172. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, H.; Gao, J.; Lin, Z.; Chen, Y. Simulation and test of corn layer alignment position hole fertilization seeder based on SPH. Trans. Chin. Soc. Agric. Machin. 2018, 49, 66–72. [Google Scholar]
- Ucgul, M.; Saunders, C.; Li, P.; Lee, S.-H.; Desbiolles, J.M.A. Analyzing the mixing performance of a rotary spader using digital image processing and discrete element modelling (DEM). Comput. Electron. Agric. 2018, 151, 1–10. [Google Scholar] [CrossRef]
- Bui, H.H.; Fukagawa, R.; Sako, K.; Ohno, S. Lagrangian meshfree particles method (SPH) for large deformation and failure flows of geomaterial using elastic-plastic soil constitutive model. Int. J. Numer. Anal. Methods Geomech. 2008, 32, 1535–1570. [Google Scholar] [CrossRef]
- Tran, H.T.; Wang, Y.N.; Nguyen, G.D.; Kodikara, J.; Sanchez, M.; Bui, H. Modelling 3D desiccation cracking in clayey soils using a size-dependent SPH computational approach. Comput. Geotech. 2019, 116, 17. [Google Scholar] [CrossRef]
- Ozbulut, M.; Yildiz, M.; Goren, O. A numerical investigation into the correction algorithms for SPH method in modeling violent free surface flows. Int. J. Mech. Sci. 2014, 79, 56–65. [Google Scholar] [CrossRef] [Green Version]
- Peng, C.; Xu, G.; Wu, W.; Yu, H.-S.; Wang, C. Multiphase SPH modeling of free surface flow in porous media with variable porosity. Comput. Geotech. 2017, 81, 239–248. [Google Scholar] [CrossRef]
- Zhang, A.; Sun, P.; Ming, F. An SPH modeling of bubble rising and coalescing in three dimensions. Comput. Methods Appl. Mech. Eng. 2015, 294, 189–209. [Google Scholar] [CrossRef]
- Bonet, J.; Kulasegaram, S.; Rodriguez-Paz, M.X.; Profit, M. Variational formulation for the smooth particle hydrodynamics (SPH) simulation of fluid and solid problems. Comput. Methods Appl. Mech. Eng. 2004, 193, 1245–1256. [Google Scholar] [CrossRef]
- Niu, W.; Mo, R.; Chang, Z.; Wan, N. Investigating the Effect of Cutting Parameters of Ti–6Al–4V on Surface Roughness Based on a SPH Cutting Model. Appl. Sci. 2019, 9, 654. [Google Scholar] [CrossRef] [Green Version]
- Gu, S.; Bo, F.; Luo, M.; Kazemi, E.; Zhang, Y.; Wei, J. SPH simulation of hydraulic jump on corrugated riverbeds. Appl. Sci. 2019, 9, 436. [Google Scholar] [CrossRef] [Green Version]
- Camporredondo, G.; Barber, R.; Legrand, M.; Muñoz, L. A Kinematic controller for liquid pouring between vessels modelled with smoothed particle hydrodynamics. Appl. Sci. 2019, 9, 5007. [Google Scholar] [CrossRef] [Green Version]
- Monaghan, J.J.; Lattanzio, J.C. A refined particle method for astrophysical problems. Astron. Astrophys. 1985, 149, 135–143. [Google Scholar]
- Liu, M.B.; Liu, G.R. Smoothed particle hydrodynamics (SPH): An overview and recent developments. Arch. Comput. Methods Eng. 2010, 17, 25–76. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Wang, H. Slope failure of noncohesive media modelled with the combined finite–discrete element method. Appl. Sci. 2019, 9, 579. [Google Scholar] [CrossRef] [Green Version]
- Zheng, X.; Ma, Q.; Shao, S. Study on SPH viscosity term formulations. Appl. Sci. 2018, 8, 249. [Google Scholar] [CrossRef] [Green Version]
- Zheng, X.; You, Y.; Ma, Q.; Khayyer, A.; Shao, S. A comparative study on violent sloshing with complex baffles using the ISPH method. Appl. Sci. 2018, 8, 904. [Google Scholar] [CrossRef] [Green Version]
- Sakong, J.; Woo, S.C.; Kim, T.W. Determination of impact fragments from particle analysis via smoothed particle hydrodynamics and k-means clustering. Int. J. Impact Eng. 2019, 134, 15. [Google Scholar] [CrossRef]
- Hang, C.; Gao, X.; Yuan, M.; Huang, Y.; Zhu, R. Discrete element simulations and experiments of soil disturbance as affected by the tine spacing of subsoiler. Biosyst. Eng. 2018, 168, 73–82. [Google Scholar] [CrossRef]
- Li, P.; Ucgul, M.; Lee, S.-H.; Saunders, C. A new method to analyse the soil movement during tillage operations using a novel digital image processing algorithm. Comput. Electron. Agric. 2019, 156, 43–50. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Parameter | Value |
|---|---|---|
| Soil particle | Bulk modulus (Mpa) | 5.9 |
| Shear modulus (Mpa) | 2.7 | |
| Density | 1700 | |
| Moisture content (%) | 23.57 | |
| Specific gravity | 2.65 | |
| Angle of internal friction (rad) | 0.42 | |
| Cohesion (Kpa) | 12 | |
| Viscoplastic parameter | 1.1 | |
| Water density | 1000 | |
| Hill-drop fertilizer device | Density | 7850 |
| Elastic modulus (Pa) | ||
| Possion’s ratio | 0.3 |
| Factor | V | B (mm) | P (mm) | L (mm) | |
|---|---|---|---|---|---|
| Level | 1 | 1.0 | 50 | 50 | 110 |
| 2 | 1.3 | 0 | 100 | 140 | |
| 3 | 1.6 | −50 | 150 | 170 | |
| Number | V | B (mm) | P (mm) | L (mm) | Value |
|---|---|---|---|---|---|
| 1 | 1 | 1 | 1 | 1 | 0.021 |
| 2 | 1 | 2 | 2 | 2 | 0.061 |
| 3 | 1 | 3 | 3 | 3 | 0.069 |
| 4 | 2 | 1 | 2 | 3 | 0.082 |
| 5 | 2 | 2 | 3 | 1 | 0.024 |
| 6 | 2 | 3 | 1 | 2 | 0.028 |
| 7 | 3 | 1 | 3 | 2 | 0.038 |
| 8 | 3 | 2 | 1 | 3 | 0.002 |
| 9 | 3 | 3 | 2 | 1 | 0.001 |
| 0.151 | 0.141 | 0.051 | 0.046 | Influence order: V, L, P, B | |
| 0.134 | 0.087 | 0.144 | 0.127 | ||
| 0.041 | 0.098 | 0.131 | 0.153 | ||
| R | 0.110 | 0.054 | 0.093 | 0.107 | |
| Optimal scheme |
| Number | V | B (mm) | P (mm) | L (mm) | Value |
|---|---|---|---|---|---|
| 1 | 1 | 1 | 1 | 1 | 0.062 |
| 2 | 1 | 2 | 2 | 2 | 0.005 |
| 3 | 1 | 3 | 3 | 3 | 0.102 |
| 4 | 2 | 1 | 2 | 3 | 0.032 |
| 5 | 2 | 2 | 3 | 1 | 0.021 |
| 6 | 2 | 3 | 1 | 2 | 0.022 |
| 7 | 3 | 1 | 3 | 2 | 0.060 |
| 8 | 3 | 2 | 1 | 3 | 0.025 |
| 9 | 3 | 3 | 2 | 1 | 0.021 |
| 0.169 | 0.154 | 0.109 | 0.104 | Influence order: P, B, V, L | |
| 0.075 | 0.051 | 0.058 | 0.087 | ||
| 0.106 | 0.145 | 0.183 | 0.159 | ||
| R | 0.094 | 0.103 | 0.125 | 0.072 | |
| Optimal scheme |
| Number | V | B (mm) | P (mm) | L (mm) | Value |
|---|---|---|---|---|---|
| 1 | 1 | 1 | 1 | 1 | 5.32 |
| 2 | 1 | 2 | 2 | 2 | 7.07 |
| 3 | 1 | 3 | 3 | 3 | 9.52 |
| 4 | 2 | 1 | 2 | 3 | 15.96 |
| 5 | 2 | 2 | 3 | 1 | 9.72 |
| 6 | 2 | 3 | 1 | 2 | 6.11 |
| 7 | 3 | 1 | 3 | 2 | 7.09 |
| 8 | 3 | 2 | 1 | 3 | 6.71 |
| 9 | 3 | 3 | 2 | 1 | 6.31 |
| 21.91 | 28.37 | 18.14 | 21.35 | Influence order: L, V, P, B | |
| 31.79 | 23.50 | 29.34 | 20.27 | ||
| 20.11 | 21.94 | 26.33 | 32.19 | ||
| R | 11.68 | 4.43 | 11.20 | 11.92 | |
| Optimal scheme |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, J.; Zhang, J.; Zhang, F.; Hou, Z.; Zhai, Y.; Ge, L. Analysis of Movement Law and Influencing Factors of Hill-Drop Fertilizer Based on SPH Algorithm. Appl. Sci. 2020, 10, 1643. https://doi.org/10.3390/app10051643
Gao J, Zhang J, Zhang F, Hou Z, Zhai Y, Ge L. Analysis of Movement Law and Influencing Factors of Hill-Drop Fertilizer Based on SPH Algorithm. Applied Sciences. 2020; 10(5):1643. https://doi.org/10.3390/app10051643
Chicago/Turabian StyleGao, Jin, Junxiong Zhang, Fan Zhang, Zeyu Hou, Yihao Zhai, and Luzhen Ge. 2020. "Analysis of Movement Law and Influencing Factors of Hill-Drop Fertilizer Based on SPH Algorithm" Applied Sciences 10, no. 5: 1643. https://doi.org/10.3390/app10051643
APA StyleGao, J., Zhang, J., Zhang, F., Hou, Z., Zhai, Y., & Ge, L. (2020). Analysis of Movement Law and Influencing Factors of Hill-Drop Fertilizer Based on SPH Algorithm. Applied Sciences, 10(5), 1643. https://doi.org/10.3390/app10051643