1. Introduction
Nowadays, many large-scale data applications in various fields require massively parallel operations to obtain results efficiently. For massively parallel computations, we can use well-known system-level programming platforms including CUDA (Compute Unified Device Architecture), OpenCL (Open Computing Language), and ROCm (Radeon Open Compute). Recently, programmers in the massively-parallel computation field found that the platform-independence and the high-level abstraction are also important, in addition to the cost-effectiveness [
1,
2,
3,
4].
This paper focuses on the new parallel computing implementations of SYCL (C++ Single-source Heterogeneous Programming for OpenCL) [
5,
6], which are actually C++ template-level implementations of high-level massively parallel computation libraries. Since SYCL can be implemented over the existing standards of OpenCL and/or CUDA, we can indirectly achieve the platform-independence. The programmers can interact with abstracted SYCL function calls, and SYCL will do complex jobs with CUDA and/or OpenCL. Additionally, C++ template features provide the high-level abstractions to the programmers.
Although the Khronos Group introduced this well-designed standard of SYCL [
5,
6], they only provide the official specifications, without reference implementations. These days, the SYCL programmers can use various SYCL implementations from different vendors. Unfortunately, an efficient SYCL implementation requires deep understanding of C++ templates, CUDA, OpenCL, and the parallel computation itself, and current SYCL implementations show diverse performances.
We will represent how heterogeneous parallel computing was historically implemented before the SYCL. We will compare the characteristics of existing SYCL implementations among various vendors. Finally, we compare the performance of those SYCL implementations by measuring execution times for well-known massively parallel computation problems.
Since most of the big-data computation and the big-data visualization applications need typical operations provided by SYCL (and underlying OpenCL and/or CUDA), this comparison and analysis provides fundamental information on the abstract-level cost-effective implementations of massively parallel computing, especially for big-data applications. This work is the first on the performance of SYCL implementations to the best of our knowledge.
2. Previous Works
2.1. Parallel Computing Platforms
Efforts to implement parallel computing have been undertaken mainly by hardware architecture researchers. The instruction-level parallelism is an important method to utilize CPU resources efficiently. The task parallelism is also important to distribute tasks across different processing cores. The conventional hardware parallelism assumes hardware locality.
In the application level, threading methods are widely used to control concurrency of the program. One of the most well-known abstractions to control concurrency will be
OpenMP (Open Multi-Processing) [
7]. OpenMP is an API (application programming interface) that provides programmers a simple and flexible interface for developing parallel applications on heterogeneous platforms. Since version 4.5, OpenMP has also supported GPGPU (general purpose graphics processing unit) accelerators with combinations of device directives [
7,
8].
Although OpenMP provides an efficient method to off-load task to GPU, OpenMP lacks some functionality to fully utilize modern GPU architecture. Modern GPGPU utilizes the programmable shared memory which usually resides in the L1 cache of GPU. Shared memory is shared within a compute unit (CU) or stream multiprocessor (SM), a set of cores that can be launched at the same time. In the latest NVIDIA Turing architecture, a single stream multiprocessor consists of 64 cores [
9].
Currently, OpenMP do not provide API to control the shared memory of GPUs. A keyword shared used in OpenMP provides a single variable that can be shared between threads to store results of reduction operations, whereas shared memory is utilized to store intermediate information of parallel tasks. Without shared memory, performances are dramatically decreased. In this paper, we focused on the platforms with shared memory control features, excluding OpenMP.
Another well-known programming standard for parallel computing is OpenACC (Open Accelerations) [
10,
11]. OpenACC also controls parallelism by using programming language directives. Currently, OpenACC-capable compilers are limited to OpenUH (Open Source University of Houston) [
12], OpenARC (Open Accelerator Research Compiler) [
13] and Omni Compiler [
14]. Moreover, these OpenACC-supporting compilers are limited to specific operating systems and parallel processors.
Kokkos [
15] is an implementation of abstracted parallel execution and memory model. Kokkos gives great flexibility by complying with standard C++ and can be compiled using major compilers, including GNU C++ compiler and Clang compiler. Kokkos utilizes OpenMP, Pthreads, and CUDA to launch parallel tasks for heterogeneous devices. However, Kokkos lacks OpenCL support, and it limits its use for GPU-based parallel processors.
2.2. CUDA (Compute Unified Device Architecture), OpenCL (Open Computing Language) and SYCL (C++ Single-Source Heterogeneous Programming for OpenCL)
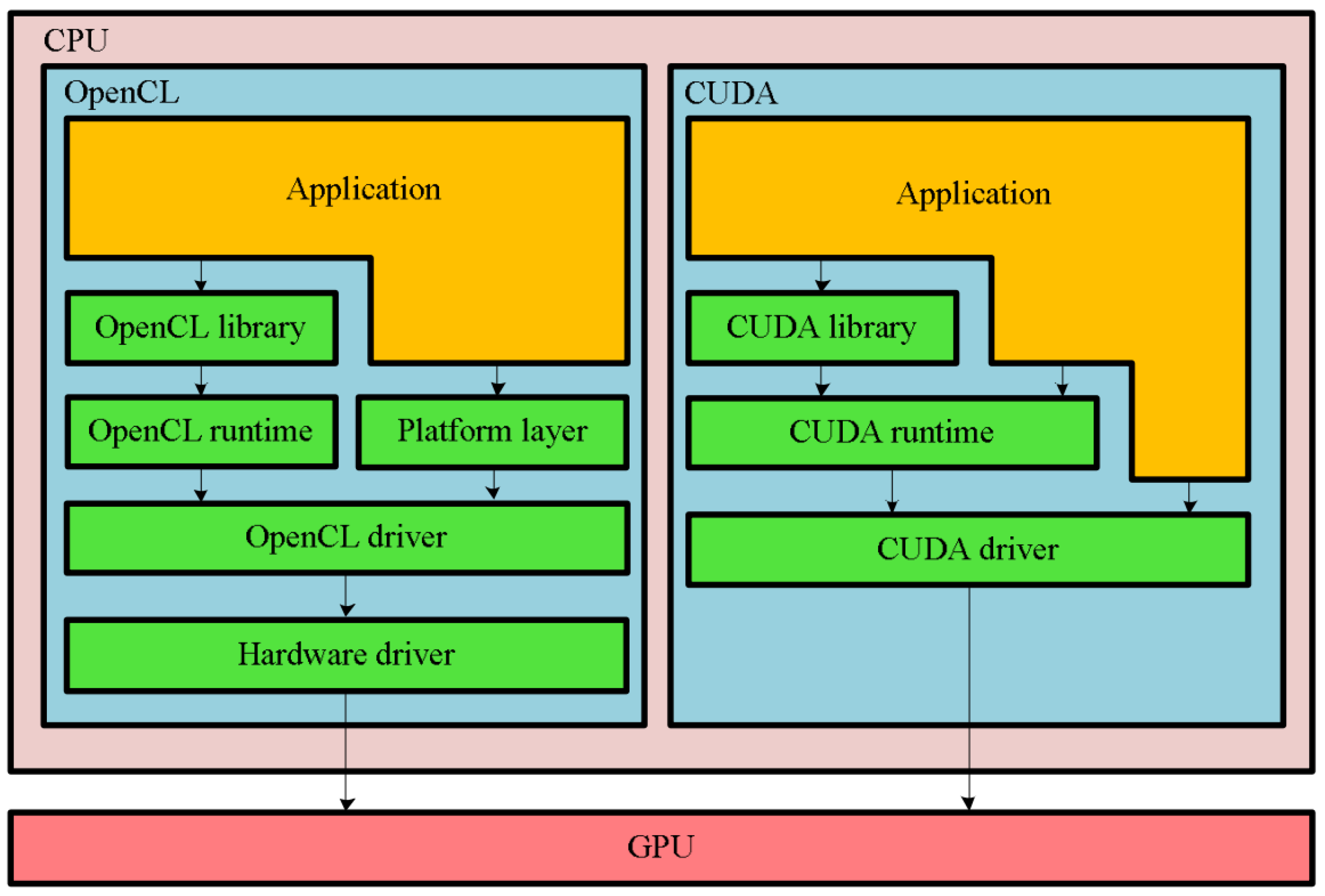
With the emergence of applications requiring massively parallel operations, they developed a set of parallel programming platforms (or frameworks) like CUDA, OpenCL and ROCm. Such parallel processor based platforms are designed for sequential parallelism, without requiring concurrency of threads. The architectural differences between two main platforms, CUDA and OpenCL, is well described in
Figure 1 [
1]. These platforms utilize GPUs as parallel processors. When GPUs are used for general-purpose data processing, rather than the traditional purpose of computer graphics processing, we call this GPGPU (general purpose GPU). The GPU processing is based on the
SPMD (single program multiple data) paradigm, which is originated from graphics data processing.
Many parallel programming applications require massively parallel tasks to compute complicated mathematical operations. Matrix multiplications (including filtering) and vector additions (or matrix additions) are the most important among those most demanding and resource-consuming operations. These two operations are widely used, from the traditional image-processing applications to the new deep learning applications and typical big-data analysis applications.
The major differences between parallel programming platforms and traditional parallel processors, including multi-core CPUs, specially-designed FPGA (field-programmable gate array) and ASIC (application-specific integrated circuit) are modern parallel programming platforms of CUDA, and OpenCL allows us to write the parallel programming codes in high-level languages to give different instructions, not depending on the underlying chipsets.
These platforms are based on the SPMD paradigms, and process multiple data with the same instructions with the kernels. A kernel is a set of data and instructions that can be written in high-level languages (or assembly languages) for specific chipsets. These kernels are converted into machine-level instructions of parallel processing units, by native compilers like NVCC (NVIDIA CUDA Compiler) or HCC (Heterogeneous Compute Compiler). Such kernels can be also adapted to use LLVM (low-level virtual machine) concepts, as a good example, with which OpenCL supports various types of parallel processing units. Each kernel is guaranteed to run in a single thread to provide data consistency. Data used in each kernel can be provided by the host (processor), which also controls kernel launches.
One of the important differences between CUDA and OpenCL is that the former is NVIDIA GPU-dependent architecture, whereas the latter pursues hardware independency. Additionally, OpenCL uses queueing systems to minimize CPU overheads. The internal execution model with a single OpenCL program is well described in [
16].
Even though OpenCL resolved hardware dependency on the existing parallel computing platforms, it also has some limitations. First, OpenCL kernels should be declared outside the main programming codes (separately as a character string or as a disk file), and then they should be compiled and linked during run-time of the main program. Although this run-time compiling of the kernel code gives a huge flexibility to programmers, embedding high-end Just-In-Time compiler and linker into the program requires many computational resources. Therefore, OpenCL run-time compiler omitted a few optimization tools to minimize required computational resources, leading to optimization being performed manually by programmers [
17].
To minimize efforts of complicated programming processes and to support hardware-independent heterogeneous parallel computing ability, Khronos group announced SYCL.
Figure 2 shows a framework diagram of SYCL for OpenCL. As described in the SYCL specification [
4], SYCL is a cross-platform abstraction C++ programming model for OpenCL. SYCL uses a SMCP (single source multiple compiler passes) approach to compile their codes to generate a SYCL file, which can be executed by both CPU and parallel processors.
Using OpenCL as a back-end inherits hardware independency. If a new chipset vendor provides its new OpenCL driver, we can naturally execute our SYCL codes on that chipset. The major differences between OpenCL and SYCL is that SYCL pursues minimal usage of device control functions, such as acquiring device information, creating context, creating a command queue, allocating memory, and others. In SYCL, these device control functions are not explicitly controlled by application programs, and are executed implicitly.
There are comparative studies to compare the efficiency of parallel-computation platforms [
18,
19,
20,
21]. According to [
18], SYCL takes longer time to execute common midpoint operation, compared to OpenCL and OpenMP. However, in the point of memory usages, SYCL used the least memory amount among another platforms. Additionally, kernel source code sizes are the shortest, showing better programmability than other parallel processing platforms. In [
20], another well-known parallel processing platform kokkos, QPhiX (QCD for Intel Xeon Phi and Xeon processors), and QUDA (QCD on CUDA) is demonstrated and performs better than SYCL, showing greater GFLOPS (Giga Floating point Operations Per Second) on Lattice QCD (quantum chromodynamics) operations. For more complicated operations, deep neural network implementation for SYCL (SYCL-DNN) was compared to Intel math kernel library for deep neural networks in [
21].
2.3. Translations between CUDA and OpenCL
As the parallel programming platform of CUDA was announced, utilizing GPU as a parallel processor has become easier. Many programs are written in CUDA to utilize GPGPU functionalities. However, since CUDA has been exclusively developed by NVIDIA, it supports only NVIDIA chip-sets. On the other hand, OpenCL, which was announced by Khronos group, is an efficient way to support various types of chipsets. In some cases, we can convert CUDA source codes to OpenCL source codes, to support wider ranges of parallel processors.
For the translation procedure between CUDA and OpenCL, we need to check the details of each parallel processing platform to launch their own kernels. Each parallel programming framework provides API bound to C/C++. They have distinguishable function names to launch kernel functions to control the execution flow, or to manipulate kernel data. For example, CUDA has cuda prefix to their API, OpenCL has cl prefix, and ROCm has hip prefix. Although each platform provides different function names, the processes of using such API in a system are very similar to each other.
First, the procedure will allocate resources in the parallel processor memory space. Second, the system will provide a kernel (which can be pre-compiled) that will be executed by each thread in parallel processors. Then, after launching the kernel, the system waits for all threads to finish their own works. Finally, the system copies back the final data, which contains results of thread execution.
A most intuitive way of the code translation is to let programmers manually translate the code of each platform by substituting similar API functions. There are also many efforts to achieve automatic translations, as shown in [
22,
23,
24]. Researches show that the automatically translated code also performs well, at least for the case of converting CUDA codes to OpenCL codes.
However, translating codes written for one platform to another platform is still challenging. This is mainly due to the differences in the work allocation models, memory space architecture, and synchronization techniques. Although the single source heterogeneous computing concept allows compilers to generate compiler intermediate codes, generating another full source code for another platform has not yet been considered. To follow the concepts of single source heterogeneous parallel computing, SYCL was announced by Khronos group. We will show the details of SYCL in the next section.
3. Comparisons of SYCL Implementations
Recently, Khronos group released SYCL version 2.2 [
6], which is based on the OpenCL 2.0 runtime functionalities. There is also another widely-used release of SYCL 1.2 [
5], based on the implementation of OpenCL 1.2 run-time. As a consequence, SYCL 1.2 and SYCL 2.2 are mixed in the current SYCL market. From the point of heterogeneous computing view, selecting a more widely used version of SYCL is important to support various types of parallel processors.
Table 1 shows supported OpenCL versions for major chipsets. As shown in this table, most modern GPUs support OpenCL version 2.0 or higher. However, some mobile processors and all NVIDIA GPUs do not support the latest OpenCL versions. Therefore, this has difficulty in measuring performance differences between different platforms. For this reason, most SYCL implementations still support only SYCL 1.2 specification. Thus, in this paper, we focused on SYCL version 1.2.
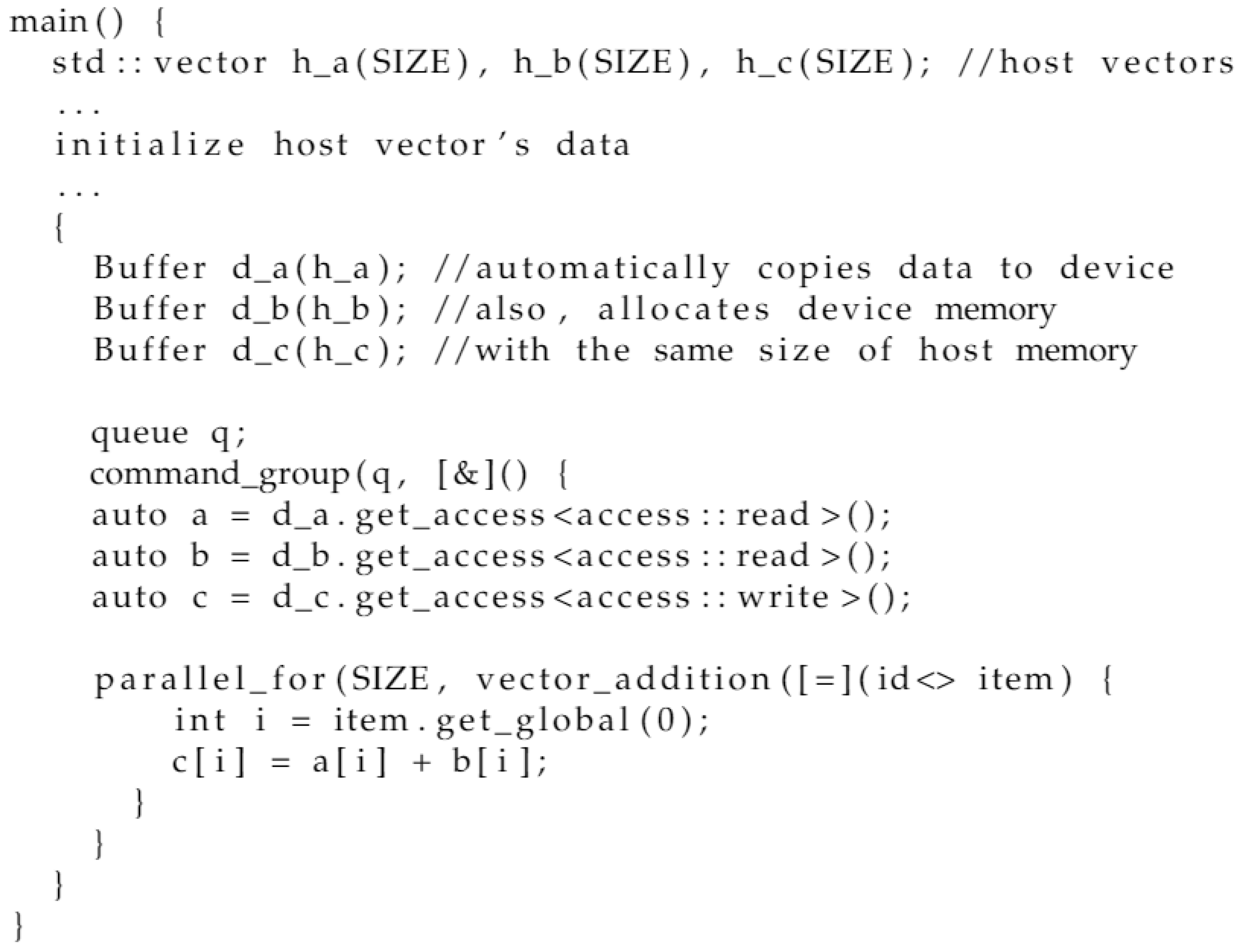
The purpose of SYCL is to provide more efficient abstract layers for parallel tasks.
Figure 3 shows a typical example of the vector addition program written in SYCL. As SYCL aims for minimum device control function calls, manually copying data to host memory or device memory is not required before and after kernel launches. Another big difference from the traditional parallel processing platform is that kernel itself should be declared inside of the lambda capture. This is done by embedding the kernel code inside the C++ code, which results in SYCL itself being compiled by conventional C++ compilers. SYCL also allows the declaration of lambda capture inside kernels. Using nested lambda capture, SYCL also provides efficient and easy method to utilize nested parallelism. Widely used GPGPU parallelism platforms do not support nested parallelism. The concept and benefit of nested parallelism is well explained in [
25]. According to Khronos group, at this time, there are three well-known SYCL implementations: ComputeCpp, triSYCL, and hipSYCL
The ComputeCpp is a heterogeneous parallel programming platform developed by Codeplay Inc, Scotland. ComputeCpp provides a conformant implementation of SYCL 1.2.1 Khronos specification. ComputeCpp provides the parallel processing capability through generating intermediate codes based on SPIR (Standard Portable Intermediate Representation) or SPIR-V that targets OpenCL. It also can generate NVPTX (NVIDIA Parallel Thread Execution) source codes, which target NVIDIA GPU.
The triSYCL is an open source implementation with the specification of the SYCL C++ layer. The triSYCL implementation fully utilizes functionalities provided by the Boost.Compute library [
26]. However, although Boost.Compute library supports OpenCL kernel codes to be compiled and executed, triSYCL does not utilize such functionality. The major drawback of not using OpenCL functionality is that the triSYCL does not support local memory. Local memory (or equivalently, shared memory in CUDA) is important storage to reduce gaps between global memory and registers. As a result, some complex operations like matrix-multiplication are not ideal to be executed on the triSYCL implementations.
The hipSYCL is built to utilize NVIDIA CUDA and AMD HIP (C++ Heterogeneous-Compute Interface for Portability). That is, with a single source code, hipSYCL can generate hardware specific executable binary codes for CUDA and/or ROCm, rather than OpenCL. Although it is in its early stage of development, one huge advantage of generating CUDA or HIP native binary source code is that there are many optimizations which OpenCL does not comply with. For example, although the queue concept of OpenCL is implemented to improve its performance by releasing the CPU workloads, it is faster to launch a kernel in CUDA if the kernel has only few operations.
There are studies about the performance comparison between platforms, as shown in [
18], or experiments using triSYCL, as shown in [
27]. However, there are very few studies about performance measures on each SYCL implementation.
4. Experimental Results
In our experiment, we measure execution times for the most widely used parallel operations of vector additions and matrix multiplications on each SYCL implementation. The execution includes data copies, kernel launch overheads, and operations in the kernels. We also measure total execution times of the same operations performed on CUDA platforms, for comparison purposes. By measuring those CUDA execution times, we can analyze gaps between native parallel programming platforms and SYCL abstracted parallel programming layers.
For all experiments, all data are generated randomly at the initial stage of the main program, before launching the parallel tasks. Considering that vectors and matrices can be represented in a one-dimensional array, data given to parallel processor are two input data arrays and single result array. The same type and size of data was given to launch parallel tasks between CUDA and SYCL. The value of individual elements inside each array is a floating-point number between zero and one. After parallel tasks are finished, we also performed same operations with CPU to check data consistency. The resulting output data of parallel tasks should have same value as the result of the CPU. Time to check consistency between results were excluded from execution time. The experiments were conducted with Intel i5-6500 CPU, Intel integrated Gen9 GPU, and NVIDIA GTX960 GPU built on Maxwell micro architecture.
Table 2 shows execution times of vector additions on various implementations with regards to the size (dimension) of vectors. It is clear that the execution time of the native platform CUDA is shorter than that of SYCL platforms for all vector sizes. Until vector size reaches 4096, triSYCL performs better than hipSYCL. With vector size at about 1 million, the execution time of hipSYCL is the fastest. However, with vector size over 10 million, ComputeCpp performs better than the other implementations.
Table 3 is the execution times of matrix multiplications, using only global memory. For the matrix multiplication, hipSYCL performs better until matrix size reaches 256. However, if matrix size is larger than 256, ComputeCpp performs better than other implementations. However, triSYCL implementation cannot calculate results within an adequate range of time for matrix size bigger than 1024. The difference between CUDA and hipSYCL occurs because of a different strategy in slicing threads into work-groups. Matrix multiplications with global memory require atomic operations to avoid memory conflict situations while writing data to memory. During atomic operations of a thread, another thread cannot access the memory and waits until the atomic operation ends. Thus, different work-group sizes, which launches concurrently, can affect the time to wait for atomic operations. This fact shows that managing work-group size is another important factor that should be optimized.
In
Table 4, we also measure time to execute matrix multiplication using local memory. Since triSYCL does not support operations within local memory, the result is excluded from the table. For the matrix multiplication with local memory, ComputeCpp performs better than hipSYCL for matrix size bigger than 32. Also, the execution time of hipSYCL took longer than the matrix multiplication using global memory. From the data, we can see that context changing of local memory is occurring frequently in hipSYCL. Considering the reason for frequent local memory context swapping, we can estimate that the workgroup size of hipSYCL is set smaller compared to ComputeCpp. From the data, we can assume that hipSYCL performs well for limited data where ComputeCpp performs well for bigger data when local memory is used.
An experimental result for differences between chipsets is shown in
Table 5. The experiment is conducted using Intel Generation 9 based integrated GPU and NVIDIA GTX960 based on Maxwell architecture. When compiling the SYCL program, we utilized ComputeCpp SYCL implementation, since ComputeCpp supports the largest number of platforms. The result show that Intel GPU has limited computing power compared to NVIDIA chipsets. For operations not using local memory, operations with small data sizes took up to 46 times longer than NVIDIA chipset. Operations with large size of data take at most 2 times longer than NVIDIA chipset.
For Intel GPU, the execution time of matrix multiplication with local memory takes longer than operations without using local memory. The tendency of performance reduction is a result of two factors. The first reason is the architecture of chipset, as Intel chipset has fewer physical threads (execution unit) that can be launched simultaneously. As the number of execution units are small, multiple context switching is inevitable to execute large logical work-group items, which shares local memory. Another reason for decreased performance is the absence of dedicated GPU memory. In this case, shared video memory should be utilized to store data. Since shared video memory should be shared with CPU, the data cannot be fetched as fast as dedicated memory, which leads to a slowdown of overall performance.
During experiments, we collected the profiled data for API calls of detailed execution of CUDA and hipSYCL with the NVIDIA profiler. The NVIDIA profiler provided fine information about runtime of CUDA, however, it did not provide a capability to profile OpenCL applications. On the other hand, CodeXL developed by AMD provided an OpenCL profiler, but profiling technology was limited to AMD GPU. Therefore, since the majority of our experiments were conducted with NVIDIA GPU, we could profile only two implementations run on CUDA. For profiling, we conducted matrix multiplications with the size of 1024, using shared memory.
Memory copy operation for hipSYCL was generated to utilize the asynchronous memory copy functionality of CUDA. Asynchronous memory copy allows programs to run another code during memory copy operations. However, according to
Table 6, hipSYCL which utilized the asynchronous copy took longer than the synchronous copy. We can assume that when we execute only a single parallel task, asynchronous copy causes more overhead than sequential copy. However, when we have to launch multiple parallel task for large data, the synchronous copy will cause more overhead for each launch. Additionally, by comparing
Table 4;
Table 6, we can see that total execution time of a parallel task increased when we enabled profiling functions. That is, to achieve the best performance, profile functions must be disabled.
Table 7 shows detailed parameters during launch of the kernel and parallel computation. The result of
Table 6 and
Table 7 show the importance of optimization in parallel task launch dimensions. SYCL implementations do not provide directives to control parallel task launch dimensions. Therefore, the launch dimensions are automatically selected by the implementation. However, as modern NVIDIA GPU can launch up to 1024 threads simultaneously, the dimensions smaller than 1024 used by hipSYCL cause frequent context changes, leading to lower theoretical occupancy.
Moreover, older architecture like NVIDIA Fermi has only 32 registers available per thread. Therefore, a hipSYCL generated kernel code may lead to hazardous security issues during compilation or execution on GPUs with outdated architecture.
5. Conclusions
In this paper, we compared differences between SYCL implementations. Although SYCL specification itself aims for single source heterogeneous computing, there are some implementations which do not support full specification of SYCL. Each platform had its characteristics in managing data and work-group sizes, even though for the same task. To achieve better results, selecting the most suitable SYCL implementation is inevitable to maximize kernel performance.
For comparison purposes, we also measured the execution time of operations written in CUDA. The result shows that in most cases, CUDA showed better performance. This was mainly due to the fact that the native platform of CUDA provides the best optimization methods for their chipsets. From the view point of single source heterogeneous computing, SYCL is one of the best solutions to give flexibility in writing parallel tasks. SYCL also provides convenient nested parallelism by fully supporting native C++ standard lambda captures inside the kernel. Moreover, the SYCL implementation work groups are now focusing on optimizing their current implementations. Thus, we can expect performance enhancement as the SYCL implementations are optimized.
Conclusively, SYCL implementations are still slower than the original parallel programming platforms, but the applications are rapidly moving to the new flexible solution of SYCL. This trend is especially important for large-scale parallel computing applications, i.e., the big-data computing and the big-data visualization applications. Our comparisons will be the starting point for selecting the most suitable SYCL implementation for a specific task.








{kind=link}
{kind=link}
{kind=link}