Research on Semi-Active Vibration Control of Pipeline Based on Magneto-Rheological Damper


Abstract
:1. Introduction
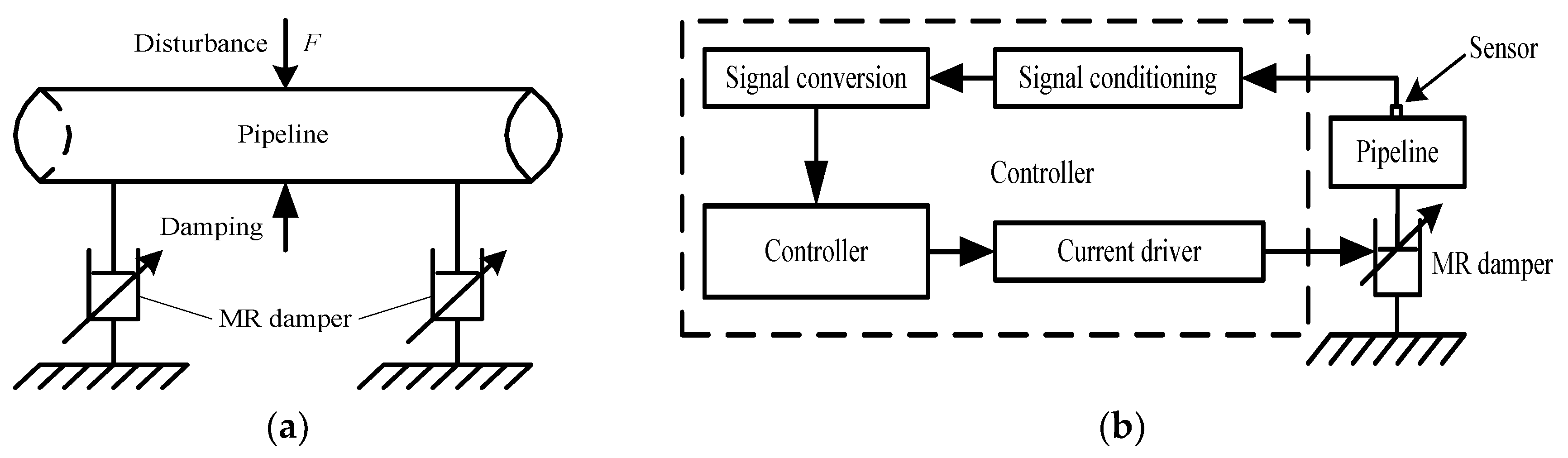
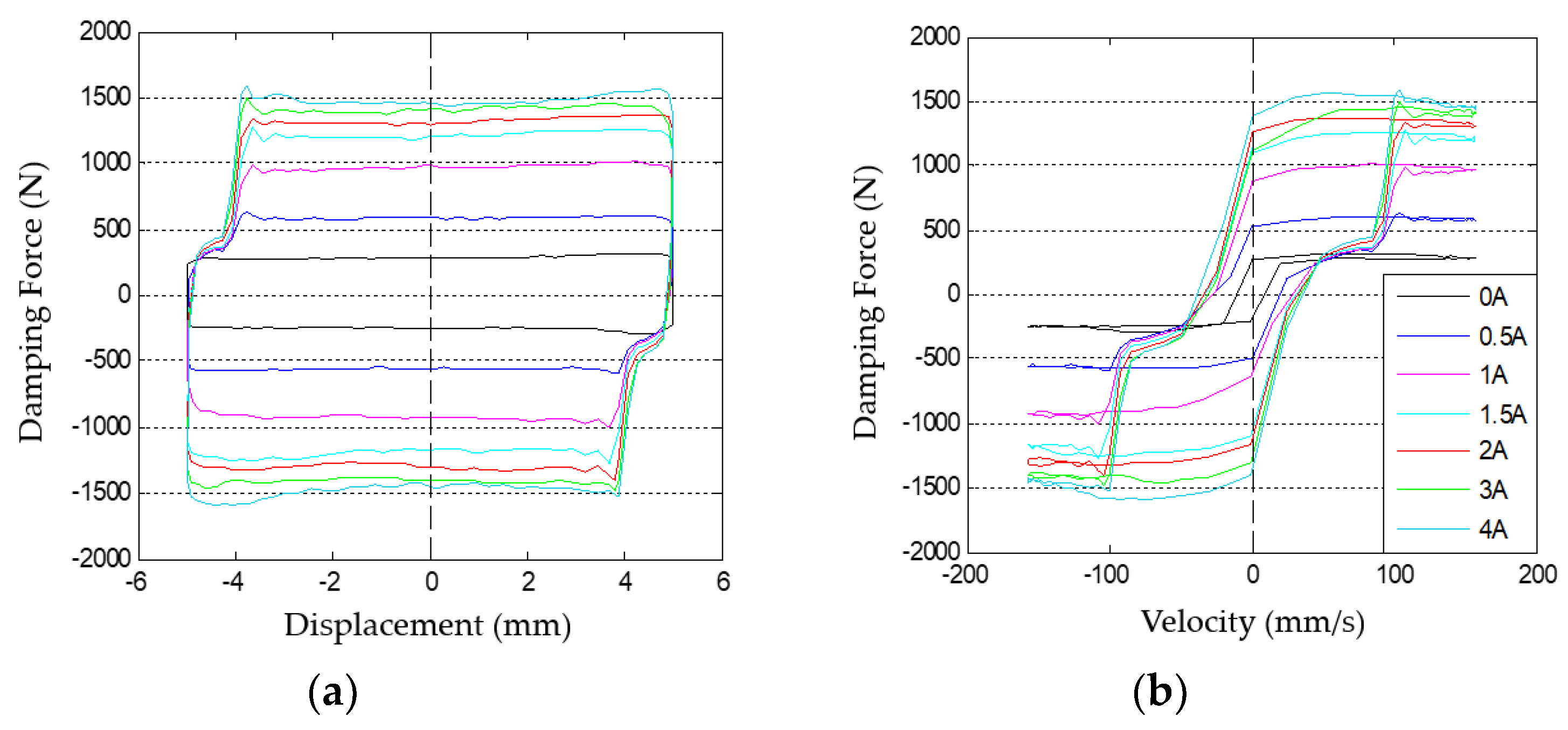
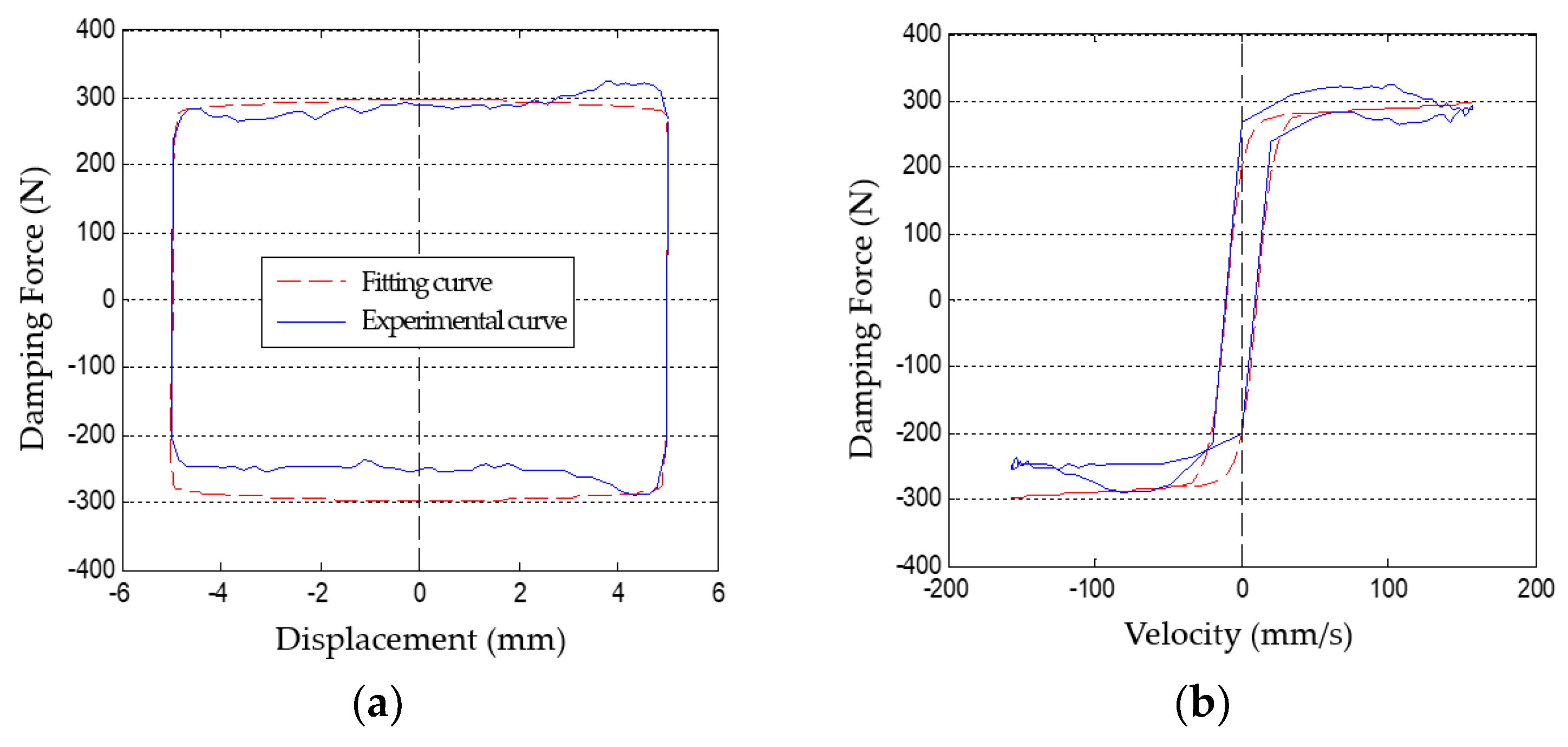
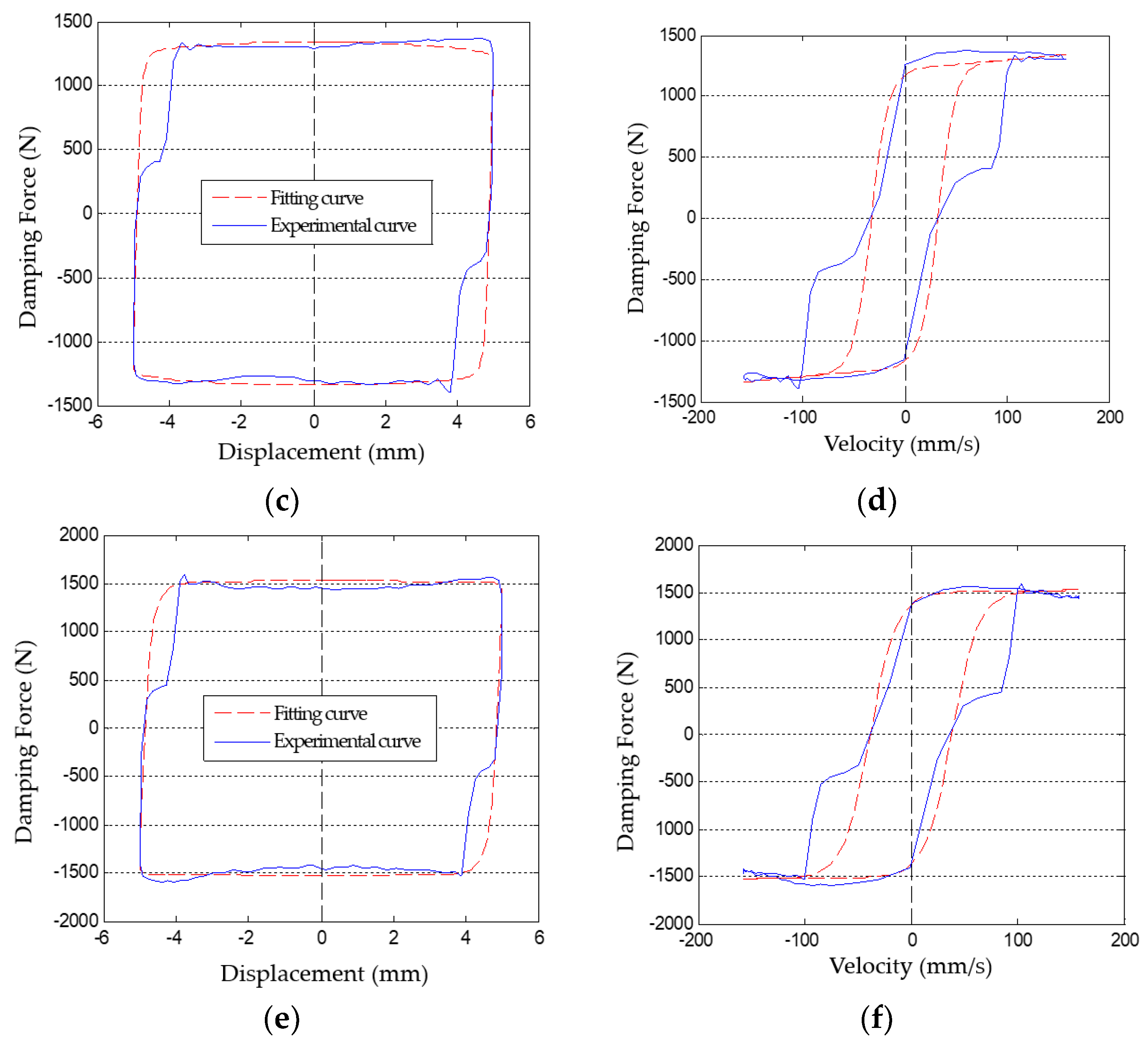
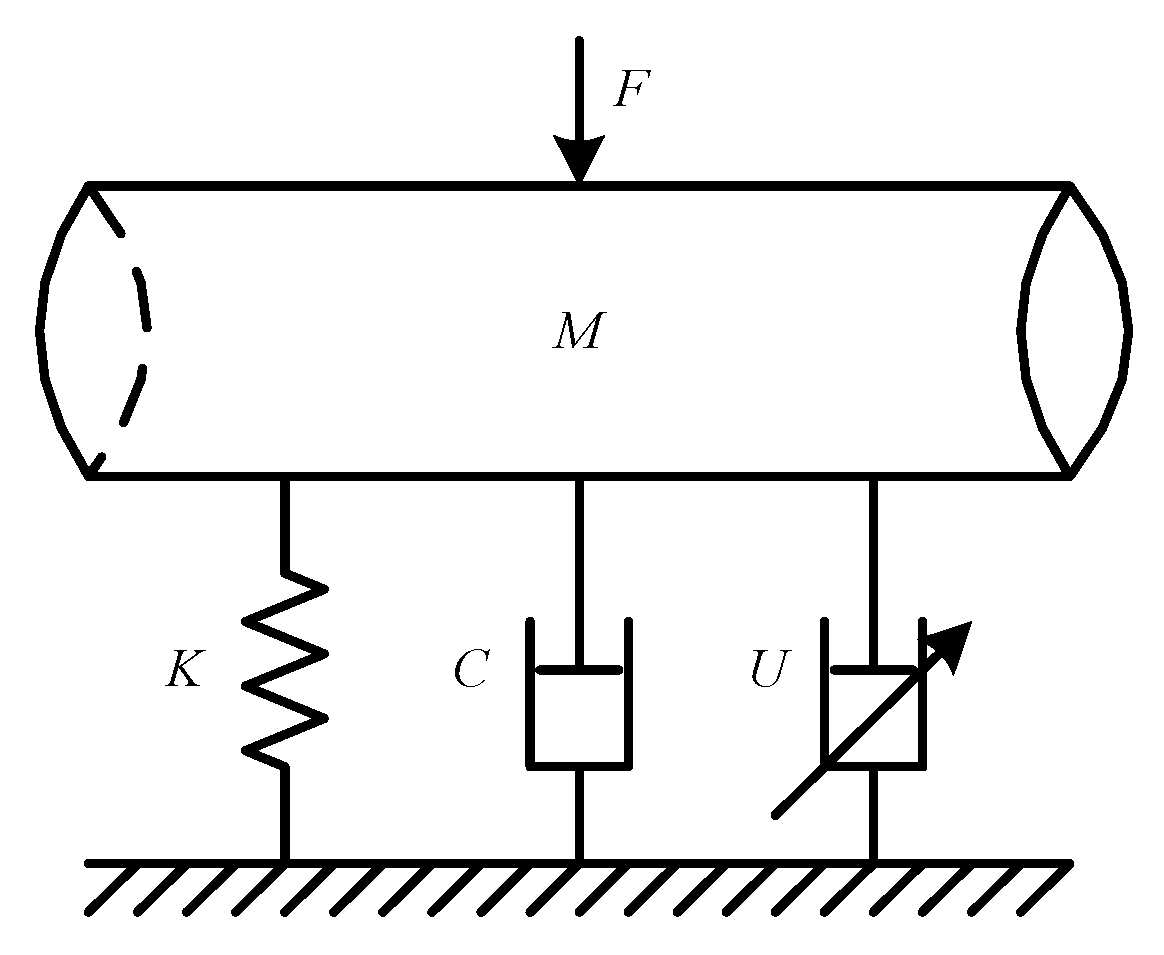
2. Model Description of MR Damper for Pipeline Vibration Control
3. Research on Semi-Active Pipeline Vibration Control System
3.1. State Equation of Pipeline System
3.2. Frequency Response Function and Transfer Function of Pipeline System
3.3. Comparative Analysis of Simulation of Different Vibration Control Algorithm
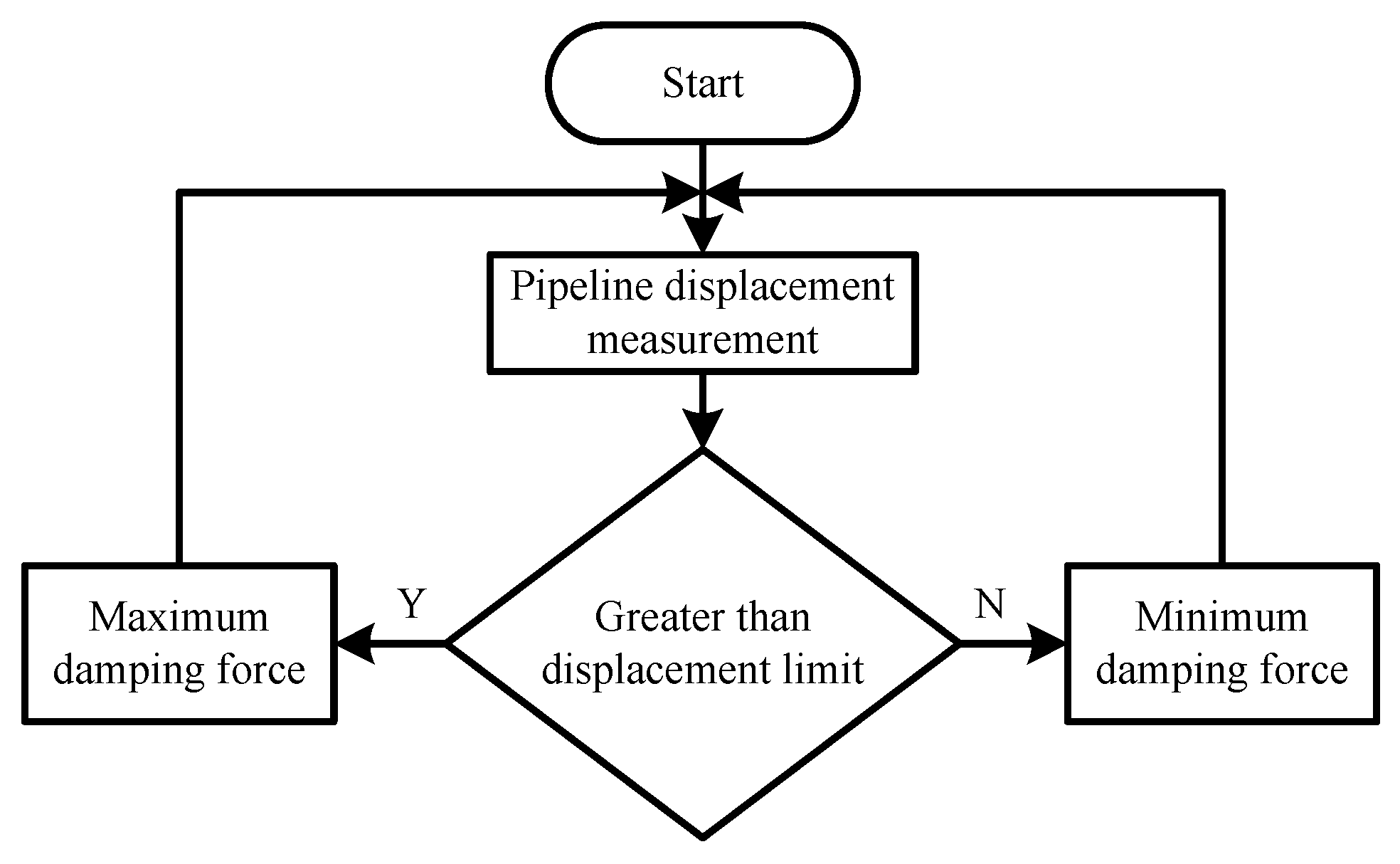
3.3.1. Two-State Vibration Control Simulation
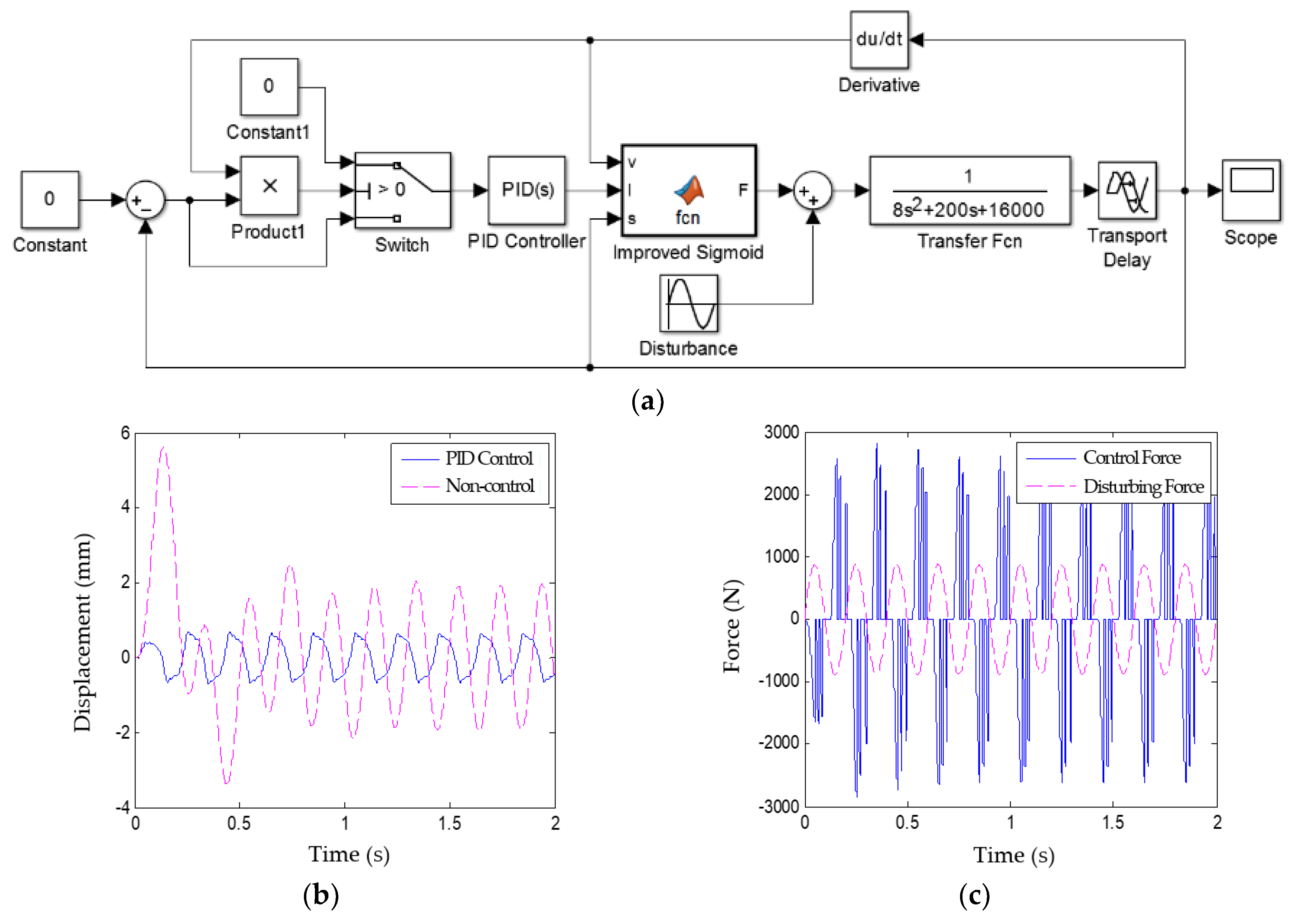
3.3.2. PID Vibration Control Simulation
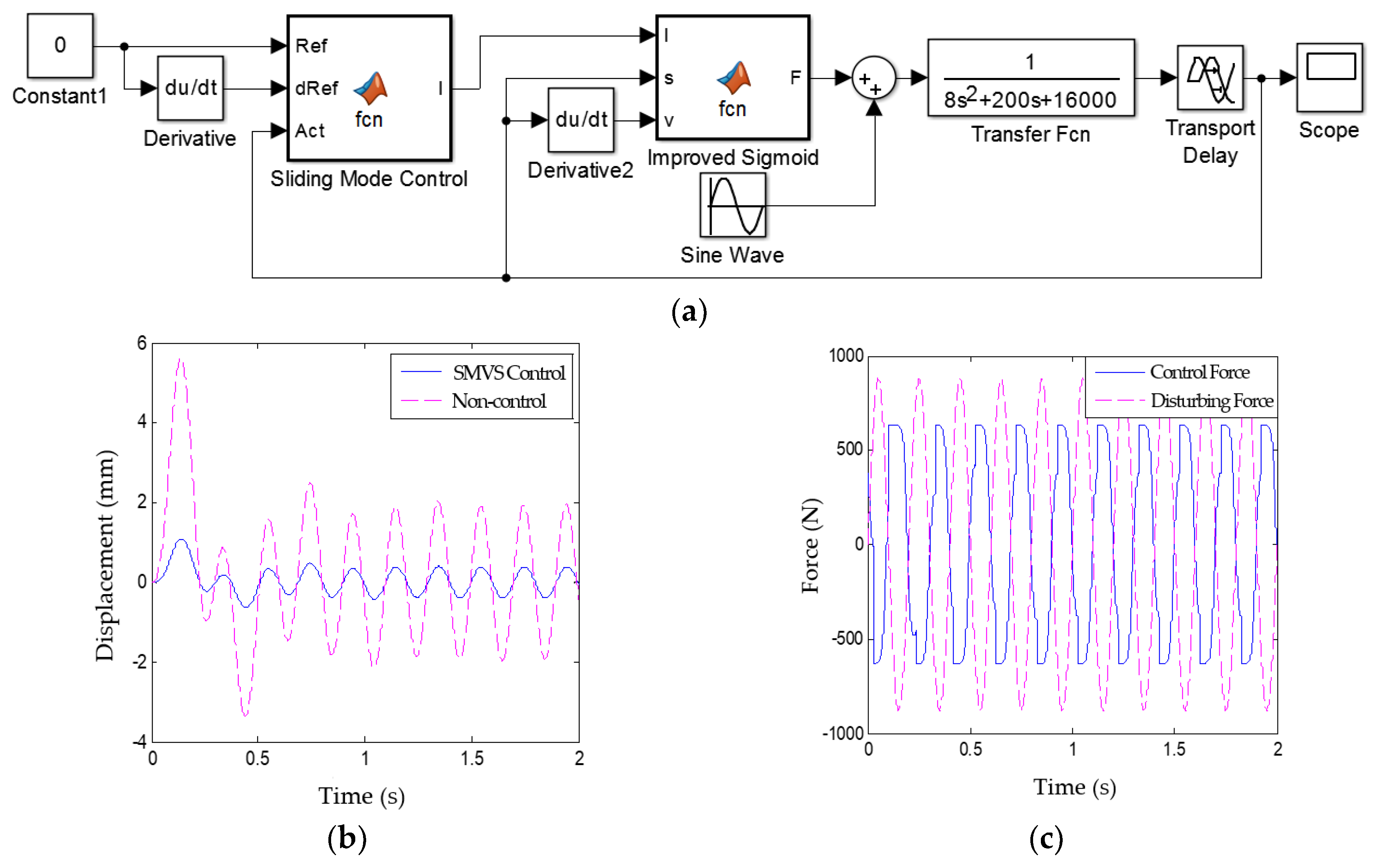
3.3.3. SMVS Vibration Control Simulation
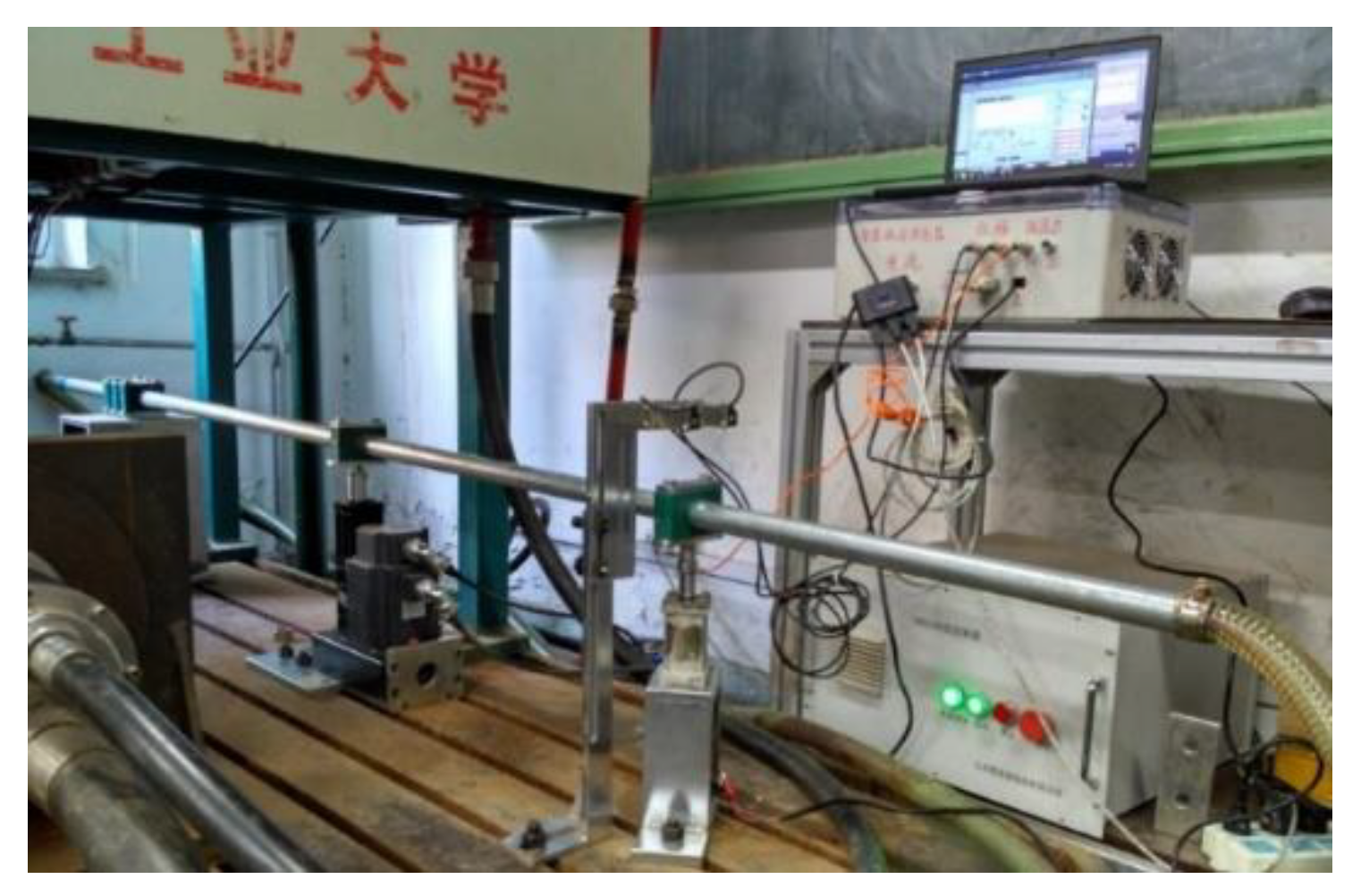
4. Experimental Study on Semi-Active Vibration Control
4.1. Pipeline Vibration Experiment Scheme
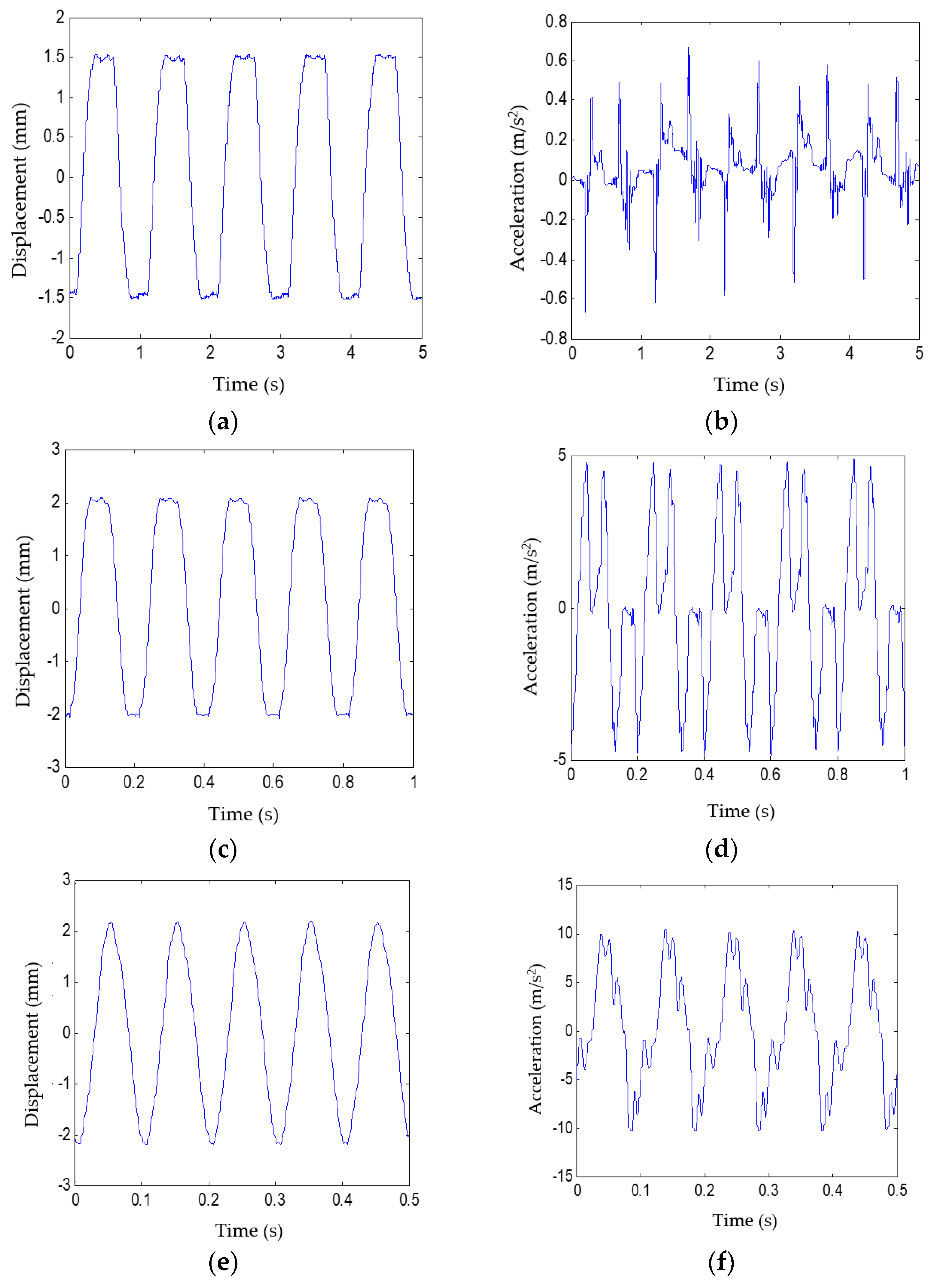
4.2. Pipeline Vibration Response Without Control
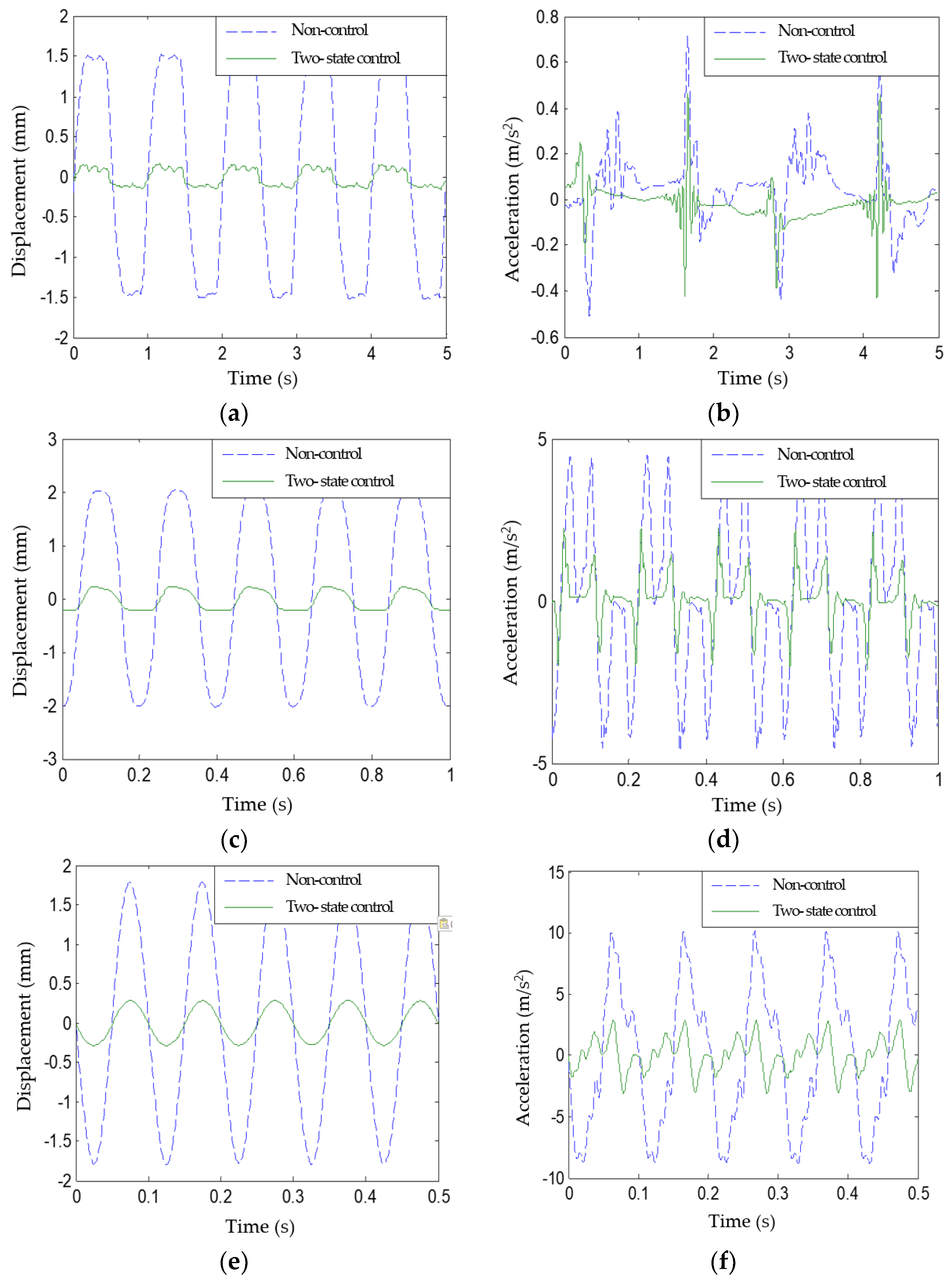
4.3. Two-State Vibration Control Experiment
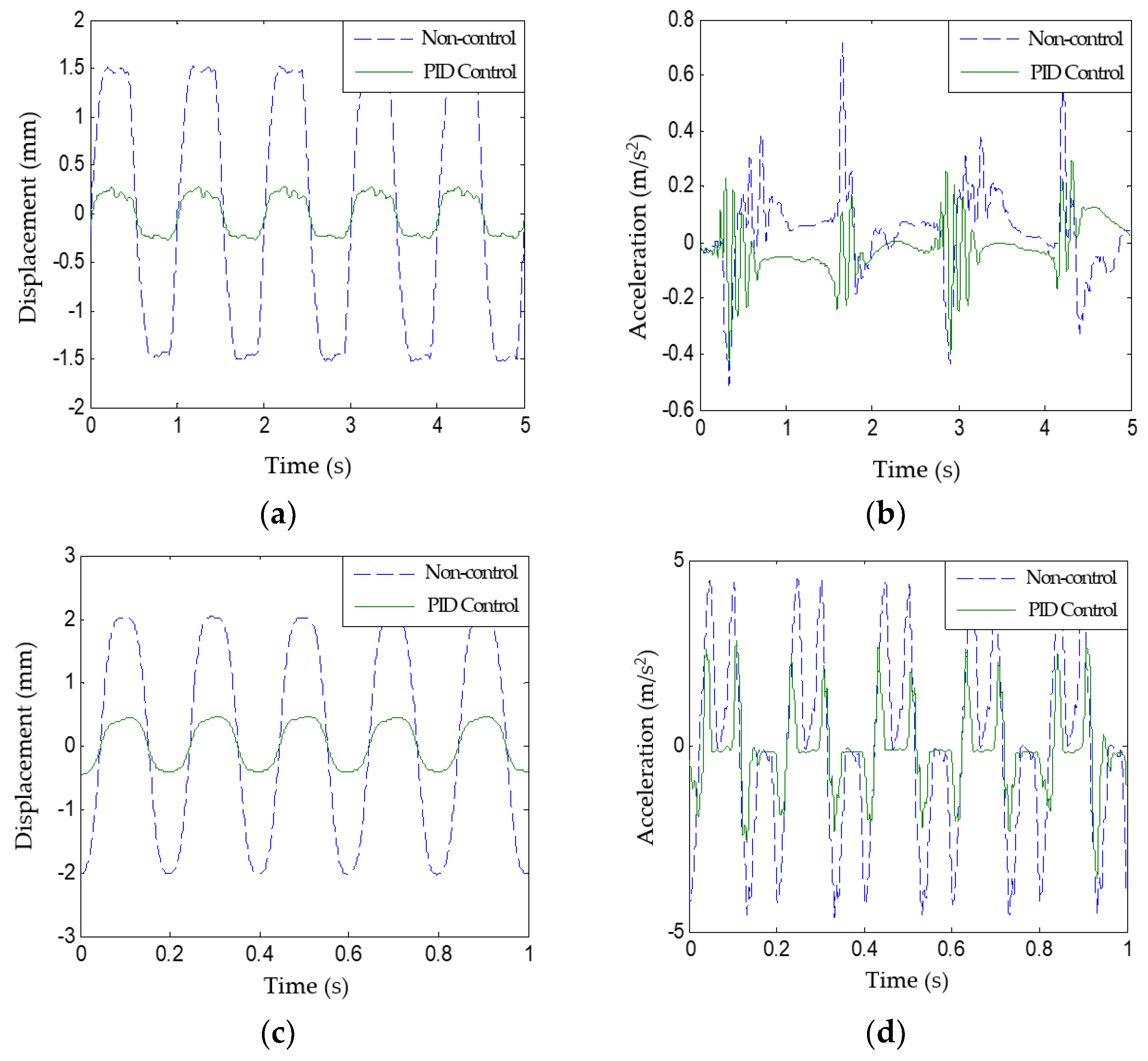
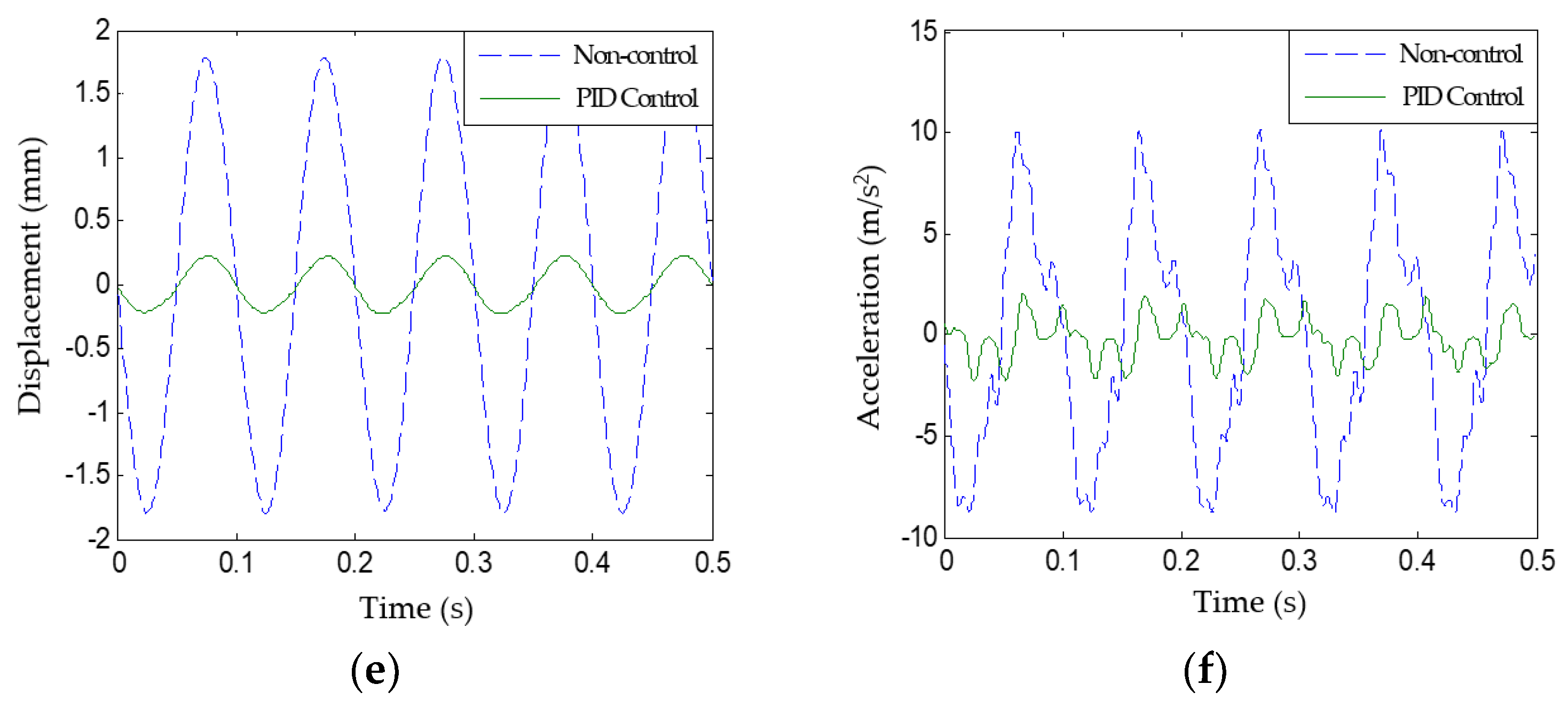
4.4. PID Vibration Control Experiment
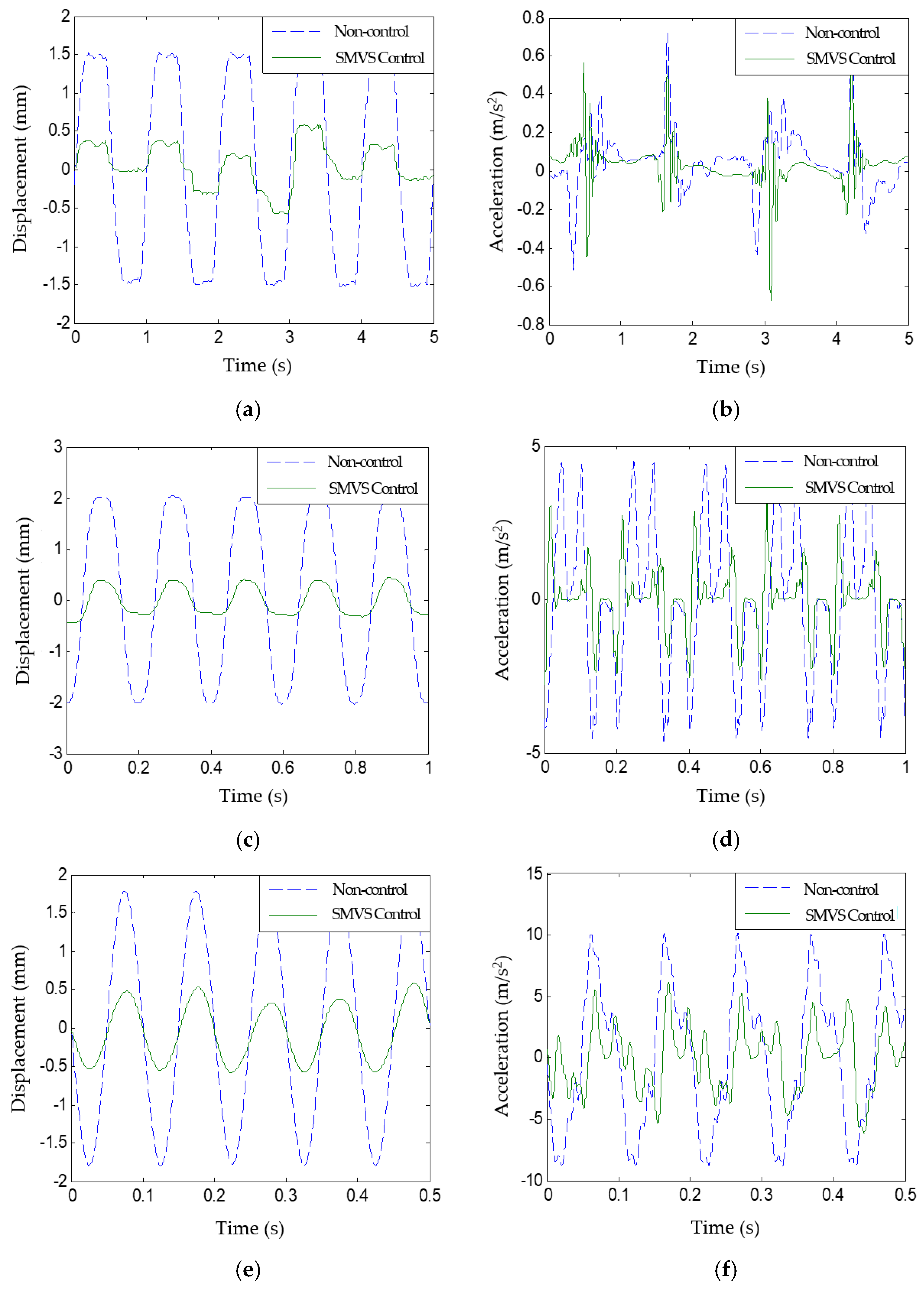
4.5. SMVS Vibration Control Experiment
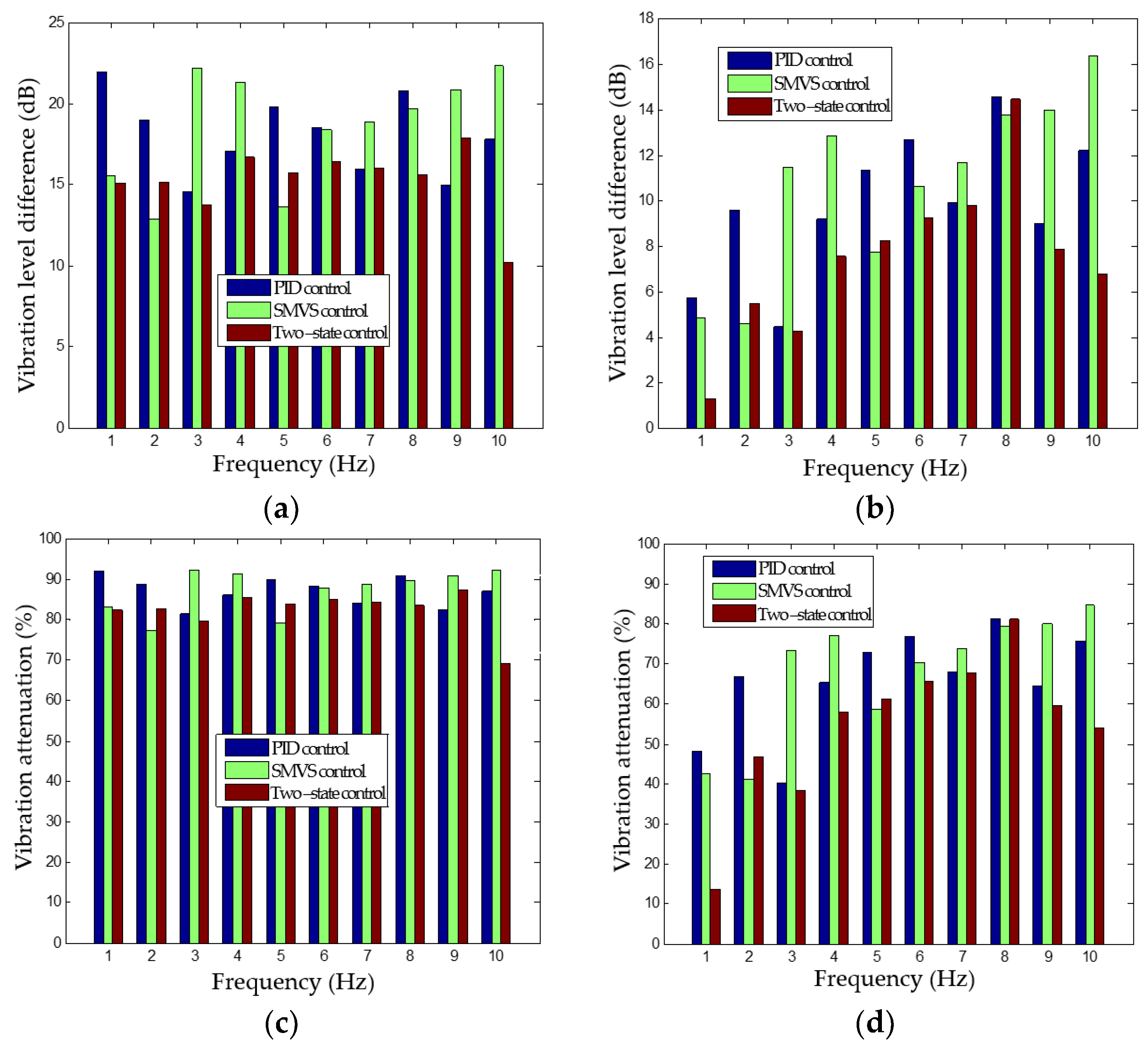
5. Results and Discussions
6. Conclusions
- (1)
- The transient response of the pipeline system with two-state control has a higher amplitude than the uncontrolled piping system. When the vibration amplitude of the pipeline is equal to the minimum limit of the two-state vibration control, the system exhibits a brief chattering, and the transient process time of the controlled pipeline system is basically the same as that of the uncontrolled system.
- (2)
- PID vibration control can effectively control the pipeline vibration during transient phase without system instability and amplitude overshoot. However, when PID vibration control is adopted, the MR damper damping force output has strong pulse characteristics, which will cause a large impact on the MR damper drive control system.
- (3)
- In the transient stage, the vibration amplitude of SMVS vibration control system is larger than that of PID vibration control system. In the steady-state stage, SMVS vibration control effect is better than that of PID control, and the continuity of SMVS vibration control force is better than that of PID control and two-state control.
- (4)
- The experimental results show that the SMVS vibration control method has the best control effect on the pipeline amplitude and acceleration. The average drop of pipeline displacement is 18.60 dB, the average deviation of acceleration is 13.10 dB, the average attenuation rate of displacement is 87.89%, the average attenuation rate of acceleration is 71.68%, and the average vibration isolation rate is 96.58%.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Quan, L.; Kong, X.; Bin, Y.U.; Bai, H. Research status and trends on fluid-structure interaction vibration mechanism and control of hydraulic pipeline. J. Mech. Eng. 2015, 51, 175–183. [Google Scholar] [CrossRef]
- Yin, Z.Y.; Zhong, R.; Liu, Z.Z. Current situation and trends on the study of noise and vibration control technology in pipeline systems. Ship Sci. Technol. 2006, 28, 23–29. [Google Scholar]
- Beketov, S.B.; Kunina, P.S.; Bunyakin, A.V.; Dubov, V.V. Failure of industrial pipelines due to low-frequency vibrations. Russ. J. Nondestruct. Test. 2017, 53, 669–676. [Google Scholar] [CrossRef]
- Wang, H.L.; Zhang, N.; Cao, D. Finite element analysis for coupling vibrations of liquid-filled pipe and support structure system. Appl. Mech. Mater. 2013, 330, 677–680. [Google Scholar] [CrossRef]
- Sheng, Z.; Yi, R.; Taotao, C.; Shuiying, Z. Vibration suppression of pipe system with tuned mass damper. J. Vib. Meas. Diagn. 2012, 32, 823–826. [Google Scholar]
- Lu, J.; He, L.D.; Hu, P. Experimental study of the reduction in the wide frequency band vibration of a pipeline using a tuned mass damper. J. Beijing Univ. Chem. Technol. (Nat. Sci. Ed.) 2015, 42, 102–106. [Google Scholar]
- Wang, W.C.; Yin, Z.Y.; Chen, K.; Yang, S.L. Research on design method for a new type 3D pipeline damper. J. Ship Mech. 2015, 19, 191–197. [Google Scholar] [CrossRef]
- Li, H.N.; Zhang, P.; Song, G.B. Robustness study of the pounding tuned mass damper for vibration control of subsea jumpers. Smart Mater. Struct. 2015, 24, 1–12. [Google Scholar] [CrossRef]
- Song, G.B.; Zhang, P.; Li, L.Y. Vibration control of a pipeline structure using pounding tuned mass damper. J. Eng. Mech. 2016, 142, 1–10. [Google Scholar] [CrossRef]
- Kiyar, M.B.; Johnson, M.; Fuller, C. Experiments on the active control of multiple wave types in fluid filled piping systems. ASME Int. Mech. Eng. Congr. Expo. 2002, 3, 33–41. [Google Scholar]
- Kartha, C.S. Active, Passive and Active/Passive Control Techniques for Reduction of Vibrational Power Flow in Fluid Filled Pipes. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2000; pp. 25–38. [Google Scholar]
- Yau, C.H.; Bajaj, A.K.; Nwokah, O.D. Active control of chaotic vibration in a constrained flexible pipe conveying fluid. Am. Soc. Mech. Eng. 1992, 9, 93–108. [Google Scholar] [CrossRef]
- Chen, S.S.; Ma, Y.Q. Seismic responses of isolated continuous girder bridges based on hybrid control of MRD and LRB. J. Beijing Univ. Technol. 2013, 39, 378–384. [Google Scholar]
- Rama, R.K.; Vineeth, V.D. Developments in vibration control of structures and structural components with magnetorheological fluids. Curr. Sci. 2017, 122, 499–508. [Google Scholar] [CrossRef]
- René, Z.; Juan, C.; Hernaldo, S. Development of a long-stroke MR damper for a building with tuned masses. Smart Mater. Struct. 2016, 25, 101–106. [Google Scholar]
- Heo, G.; Kim, C.; Lee, C. Experimental test of asymmetrical cable-stayed bridges using MR-damper for vibration control. Soil Dyn. Earthq. Eng. 2014, 57, 78–85. [Google Scholar] [CrossRef]
- Xin, D.K.; Nie, S.L.; Ji, H.; Yin, F.L. Characteristics, optimal design, and performance analyses of MRF damper. Shock Vib. 2018, 6, 1–17. [Google Scholar]
- Nie, S.L.; Xin, D.K.; Ji, H.; Yin, F.L. Optimization and performance analysis of magnetorheological fluid damper considering different piston configurations. J. Intell. Mater. Syst. Struct. 2019, 30, 764–777. [Google Scholar] [CrossRef]
- Li, X.L.; Li, H.N. Double-sigmoid model for magnetorheological damper and corresponding experiment verification. J. Vib. Eng. 2006, 19, 168–172. [Google Scholar]
- Ji, C.Y.; Zhi, G.X.; Wang, Y.; Cui, J. Study on design principles for the impact resistant piping system. Ship Ocean Eng. 2015, 44, 112–116. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Frequency (Hz) | Displacement | Acceleration | ||
|---|---|---|---|---|
| Peak Value (mm) | RMS (mm) | Peak Value (m/s2) | RMS (m/s2) | |
| 1 | 1.6240 | 1.3077 | 0.6511 | 0.1729 |
| 2 | 1.8037 | 1.4668 | 1.5992 | 0.5786 |
| 3 | 1.9009 | 1.5444 | 2.5029 | 1.1008 |
| 4 | 1.9739 | 1.5913 | 3.8743 | 1.7155 |
| 5 | 2.0993 | 1.6675 | 4.7160 | 2.5321 |
| 6 | 2.2429 | 1.6887 | 6.4104 | 3.3078 |
| 7 | 2.3505 | 1.7609 | 9.4170 | 4.2914 |
| 8 | 2.1782 | 1.6277 | 8.6629 | 4.7947 |
| 9 | 2.2335 | 1.5323 | 10.6674 | 5.5253 |
| 10 | 2.2967 | 1.5292 | 9.7745 | 5.8046 |
| Frequency (Hz) | Displacement (mm) | Acceleration (m/s2) | ||||
|---|---|---|---|---|---|---|
| RMS (mm) | Difference (dB) | Attenuation | RMS (m/s2) | Difference (dB) | Attenuation | |
| 1 | 0.1047 | 21.9312 | 91.99% | 0.0895 | 5.7194 | 48.24% |
| 2 | 0.1657 | 18.9410 | 88.70% | 0.1928 | 9.5454 | 66.68% |
| 3 | 0.2879 | 14.5904 | 81.36% | 0.6580 | 4.4697 | 40.23% |
| 4 | 0.2229 | 17.0728 | 85.99% | 0.5958 | 9.1858 | 65.27% |
| 5 | 0.1705 | 19.8068 | 89.78% | 0.6861 | 11.3419 | 72.90% |
| 6 | 0.2003 | 18.5174 | 88.14% | 0.7711 | 12.6486 | 76.69% |
| 7 | 0.2805 | 15.9560 | 84.07% | 1.3702 | 9.9163 | 68.07% |
| 8 | 0.1491 | 20.7619 | 90.84% | 0.8985 | 14.5449 | 81.26% |
| 9 | 0.2730 | 14.9836 | 82.18% | 1.9606 | 8.9993 | 64.52% |
| 10 | 0.1973 | 17.7867 | 87.10% | 1.4246 | 12.2016 | 75.46% |
| Frequency (Hz) | Displacement | Acceleration | ||||
|---|---|---|---|---|---|---|
| RMS (mm) | Difference (dB) | Attenuation | RMS (m/s2) | Difference (dB) | Attenuation | |
| 1 | 0.2196 | 15.4975 | 83.21% | 0.0992 | 4.8257 | 42.63% |
| 2 | 0.3308 | 12.9361 | 77.45% | 0.3401 | 4.6154 | 41.22% |
| 3 | 0.1205 | 22.1555 | 92.20% | 0.2952 | 11.4318 | 73.18% |
| 4 | 0.1372 | 21.2880 | 91.38% | 0.3913 | 12.8376 | 77.19% |
| 5 | 0.3485 | 13.5973 | 79.10% | 1.0443 | 7.6931 | 58.76% |
| 6 | 0.2034 | 18.3840 | 87.96% | 0.9785 | 10.5796 | 70.42% |
| 7 | 0.1994 | 18.9202 | 88.68% | 1.1215 | 11.6560 | 73.87% |
| 8 | 0.1678 | 19.7356 | 89.69% | 0.9826 | 13.7677 | 79.51% |
| 9 | 0.1392 | 20.8341 | 90.92% | 1.1065 | 13.9681 | 79.97% |
| 10 | 0.1172 | 22.3107 | 92.34% | 0.8842 | 16.3444 | 84.77% |
| Frequency (Hz) | Displacement | Acceleration | ||||
|---|---|---|---|---|---|---|
| RMS (mm) | Difference (dB) | Attenuation | RMS (m/s2) | Difference (dB) | Attenuation | |
| 1 | 0.2301 | 15.0918 | 82.40% | 0.1494 | 1.2689 | 13.59% |
| 2 | 0.2566 | 15.1423 | 82.51% | 0.3082 | 5.4709 | 46.73% |
| 3 | 0.3149 | 13.8117 | 79.61% | 0.6772 | 4.2198 | 38.48% |
| 4 | 0.2318 | 16.7328 | 85.43% | 0.7179 | 7.5665 | 58.15% |
| 5 | 0.2719 | 15.7531 | 83.69% | 0.9828 | 8.2203 | 61.19% |
| 6 | 0.2561 | 16.3829 | 84.83% | 1.1387 | 9.2626 | 65.58% |
| 7 | 0.2771 | 16.0620 | 84.26% | 1.3910 | 9.7854 | 67.59% |
| 8 | 0.2688 | 15.6429 | 83.49% | 0.9102 | 14.4325 | 81.02% |
| 9 | 0.1951 | 17.9017 | 87.27% | 2.2343 | 7.8643 | 59.56% |
| 10 | 0.4714 | 10.2215 | 69.17% | 2.6675 | 6.7534 | 54.05% |
| Method | |||||
|---|---|---|---|---|---|
| Two-state | 15.27 dB | 8.34 dB | 82.27% | 54.59% | 91.77% |
| PID | 18.04 dB | 9.86 dB | 87.01% | 65.93% | 95.28% |
| SMVS | 18.57 dB | 10.77 dB | 87.29% | 68.15% | 95.43% |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, H.; Huang, Y.; Nie, S.; Yin, F.; Dai, Z. Research on Semi-Active Vibration Control of Pipeline Based on Magneto-Rheological Damper. Appl. Sci. 2020, 10, 2541. https://doi.org/10.3390/app10072541
Ji H, Huang Y, Nie S, Yin F, Dai Z. Research on Semi-Active Vibration Control of Pipeline Based on Magneto-Rheological Damper. Applied Sciences. 2020; 10(7):2541. https://doi.org/10.3390/app10072541
Chicago/Turabian StyleJi, Hui, Yeqing Huang, Songlin Nie, Fanglong Yin, and Zhaoyi Dai. 2020. "Research on Semi-Active Vibration Control of Pipeline Based on Magneto-Rheological Damper" Applied Sciences 10, no. 7: 2541. https://doi.org/10.3390/app10072541