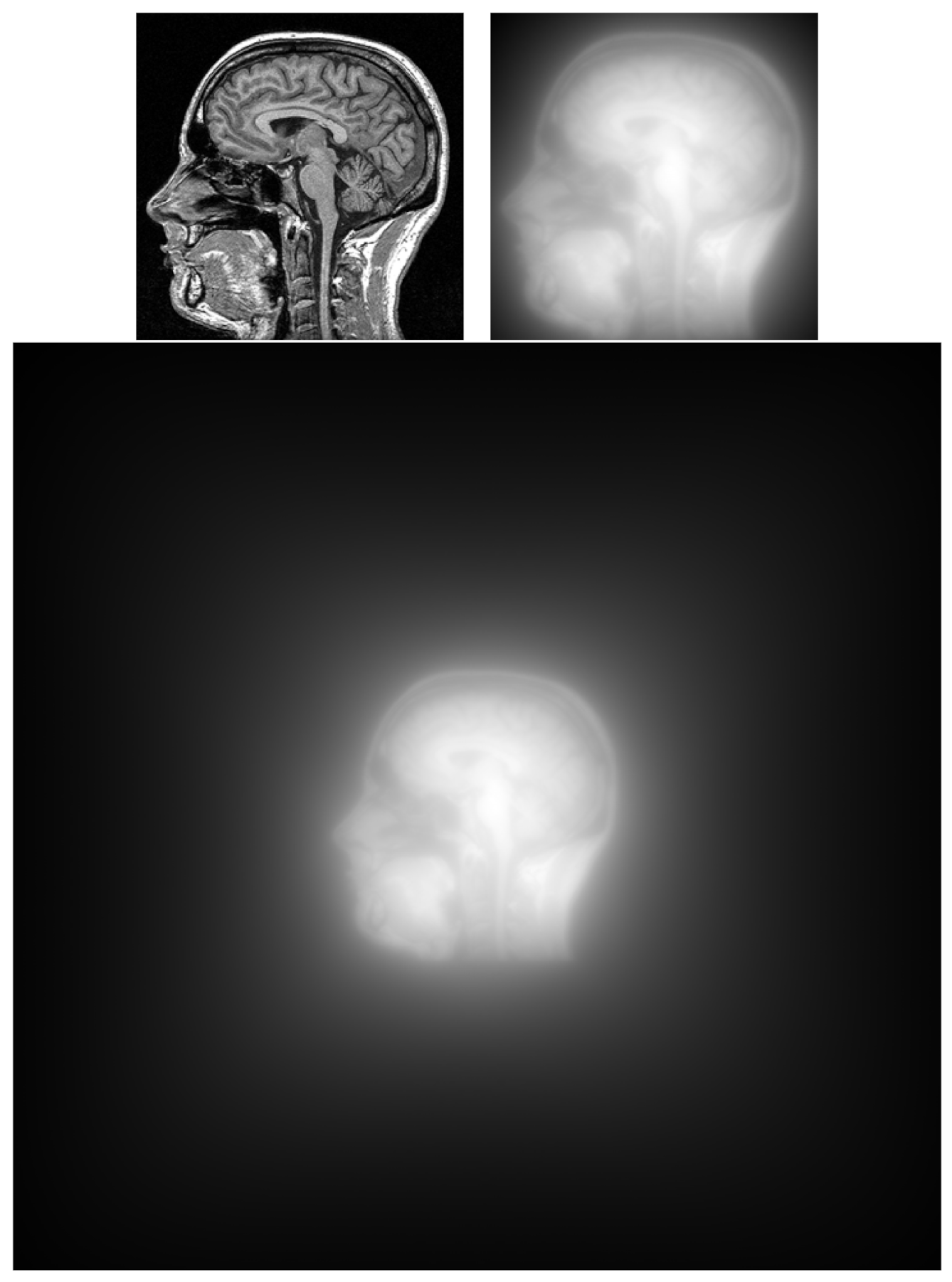
The next step before inverting the direct Radon transform is to completely characterize the impulse response of the operator conformed by the direct transform together with the just defined extended backprojection.
The most favorable case would be that, regardless of the location of these impulses, the response would be the same, only shifted. In that case it would be a time-invariant system that if it were in addition lineal—which it is in our case—it would allow to be quickly deconvolved dividing by the Fourier transform of the impulse response.
Unfortunately, the impulse responses change with the position in our case. The different responses are produced by how the different discrete lines travel the initial impulse depending on its position, because these same lines will be the ones that the backprojection transform returns. A single point—the isolated impulse to characterize—on the original image will be projected to exactly one displacement per angle, and will give rise to a line in the backprojection algorithm. All those lines (, one per angle) will be backprojected and will intersect at the original point location. This accumulation of lines around the impulse will not be homogeneous nor the same in all positions of the input image because the definition of the lines yield non-straight lines.
The digital lines of the DRT are ‘broken’ lines (concatenation of line segments that approximate the line of desired slope) that avoid interpolation and that internally are the key to accelerate the algorithm since their recursive formula is fundamental to the divide-and-conquer approach. Therefore, it cannot be discussed if the non-uniformity of this lines can be relaxed, smoothed, as this is the heart of the method. The work that has to be done is to study how variable are these discrete impulse responses that the ‘broken’ lines give place to, and, in spite of this heterogeneity, how much the deconvolution can be accelerated even though the system is not properly LTI. That study is carried out in the next section.
2.2.1. Time Variant Impulse Responses
As stated previously, the following are the recursive and non-recursive definitions of discrete line:
For example, when , a ‘discrete’ line of slope , will traverse through points with , i.e.: ,,,, ,,,.
The lines with an odd ascent-slope will rise in the boundary between the values and . This is the ‘bit boundary’ with the most significant bit weight: . In other words, whether a line ascends or not preceding will be determined by the least significant bit of the slope, (which is one for odd numbers). The next least significant ‘bit boundary’ occurs at and , and the ascent in there will be determined by bit of the slope. In general, the bit of the slope will determine whether to ascend or not at positions whose greatest power of two divisor is . In the previous example, for and , the discrete line has ascended in bit boundaries and , and remained without ascension for ; of course, in accordance with expression in binary as .
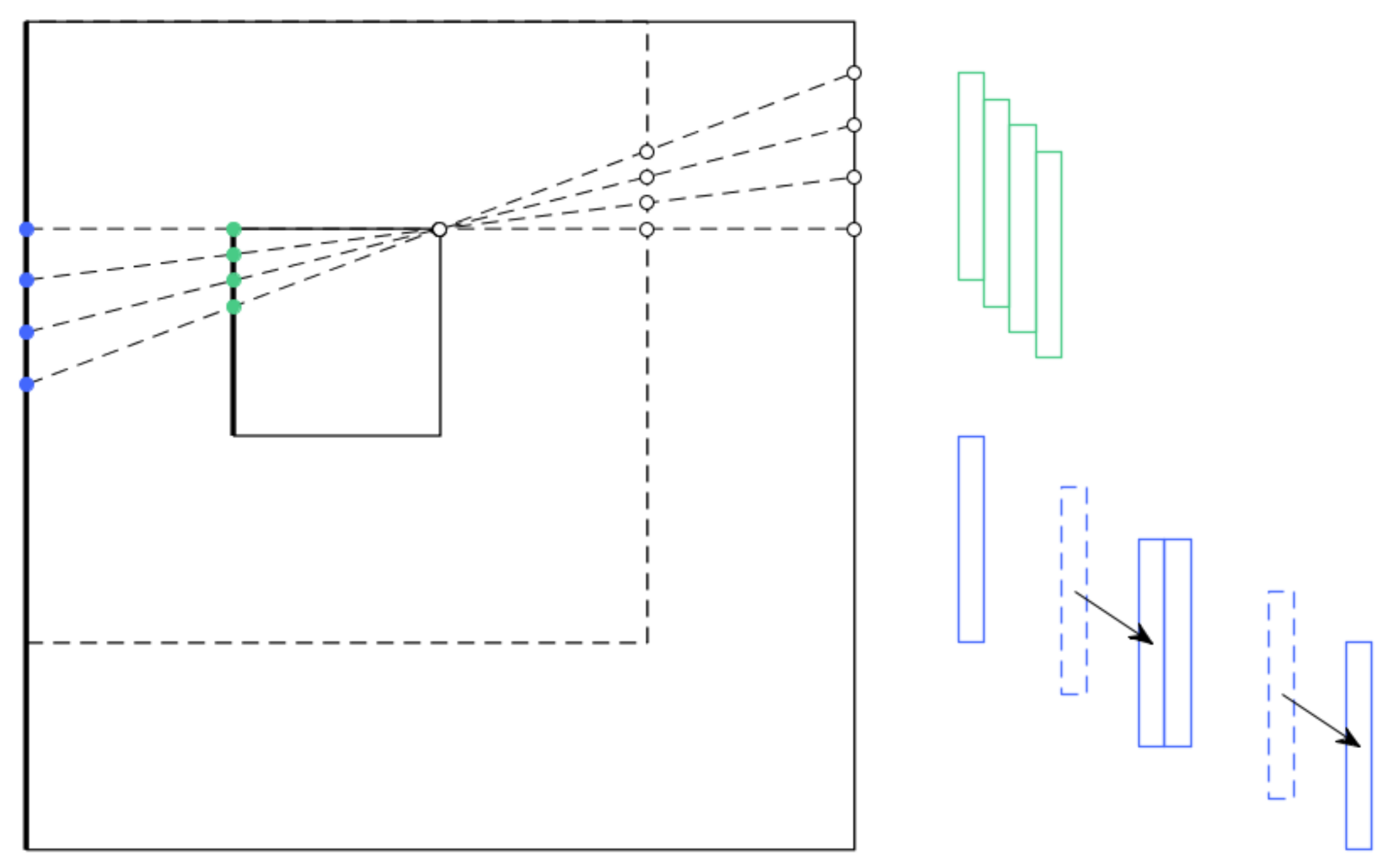
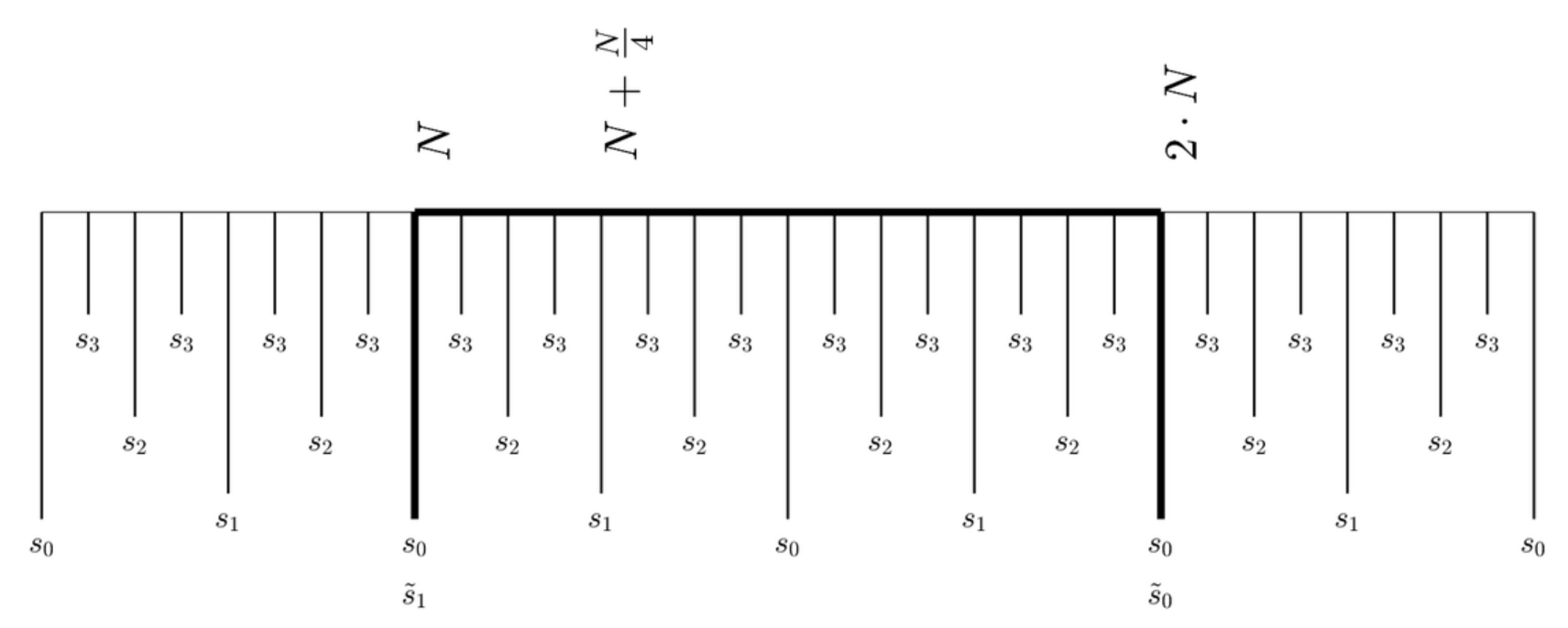
The bits boundaries of the slopes for the extended DRT that we propose are shown in
Figure 5. The
N original data are located between positions
N and
when the domain is extended to
. The figure shows those positions, as well as
additional values to each side.
An impulse that is located originally at the position 0 in one dimension, will be located at the position N in the extension and through it there will be N lines crossing, with slopes approximately equal to the multiples of 4 of the values from 0 to . Actually, the original slopes were , but now they will be ; this means that we add 3 to the odd slopes. This process at bit level is equivalent to shifting two places to the left the original bits of the slope and replicate in the two least significant additional bits the original bit.
In the
Figure 5 this phenomenon is highlighted in the boundaries around
N and
, limits where the original image is placed in, and that in terms of the extended slope it would be flanked by the bits
and
, but to the effects of the lines that we are going to inject in the system these bits are equivalent to
.
With this preamble we can move on to describe how the combined response of the direct transform plus the adjoint transform is configured around an impulse in any position of a dimension of an image. The following description will be valid for the quadrant of positive slopes. The negative slopes are a horizontally inverted replica of the responses we will characterize now. The responses in the other dimension can be found with a transposition.
The impulse response to a unitary input located originally in the position 0 (extended position N) in a problem of size
will find in the positive horizontal direction and by order of boundaries:
, see
Figure 5. If the size of the problem was, instead,
, the
boundaries would not exist. If the size of the problem was
, there would be additional
boundaries interleaved between those of the
case, and so on. We will analyze the case
for simplicity, and therefore the boundaries will be:
.
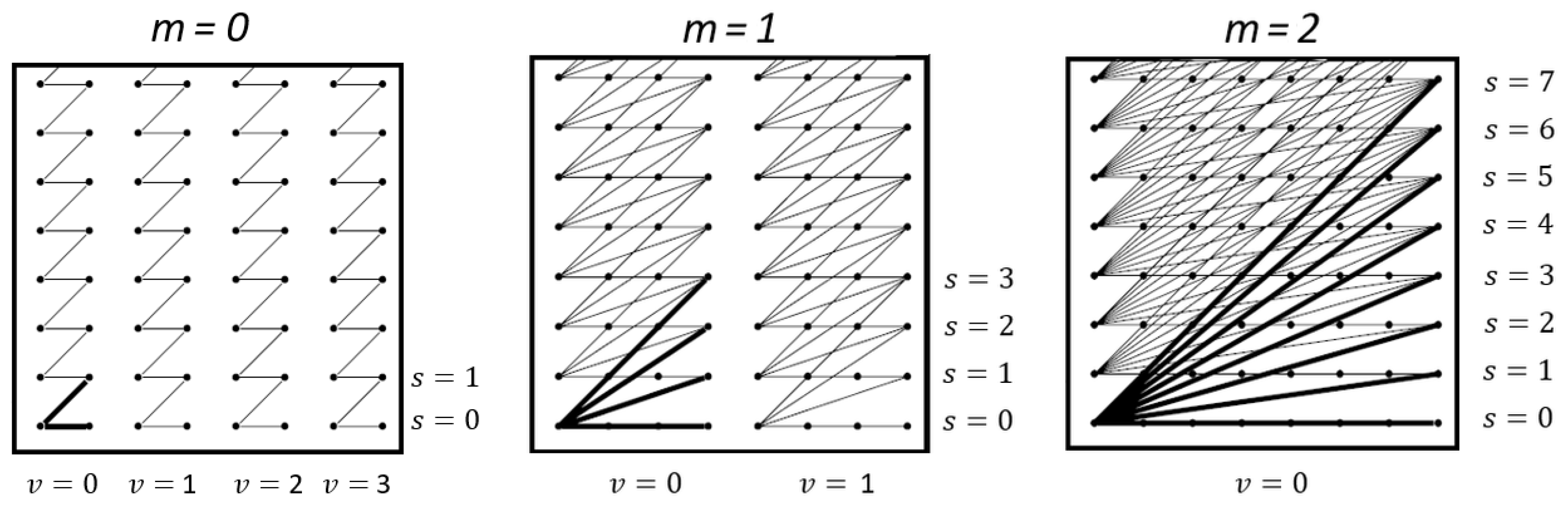
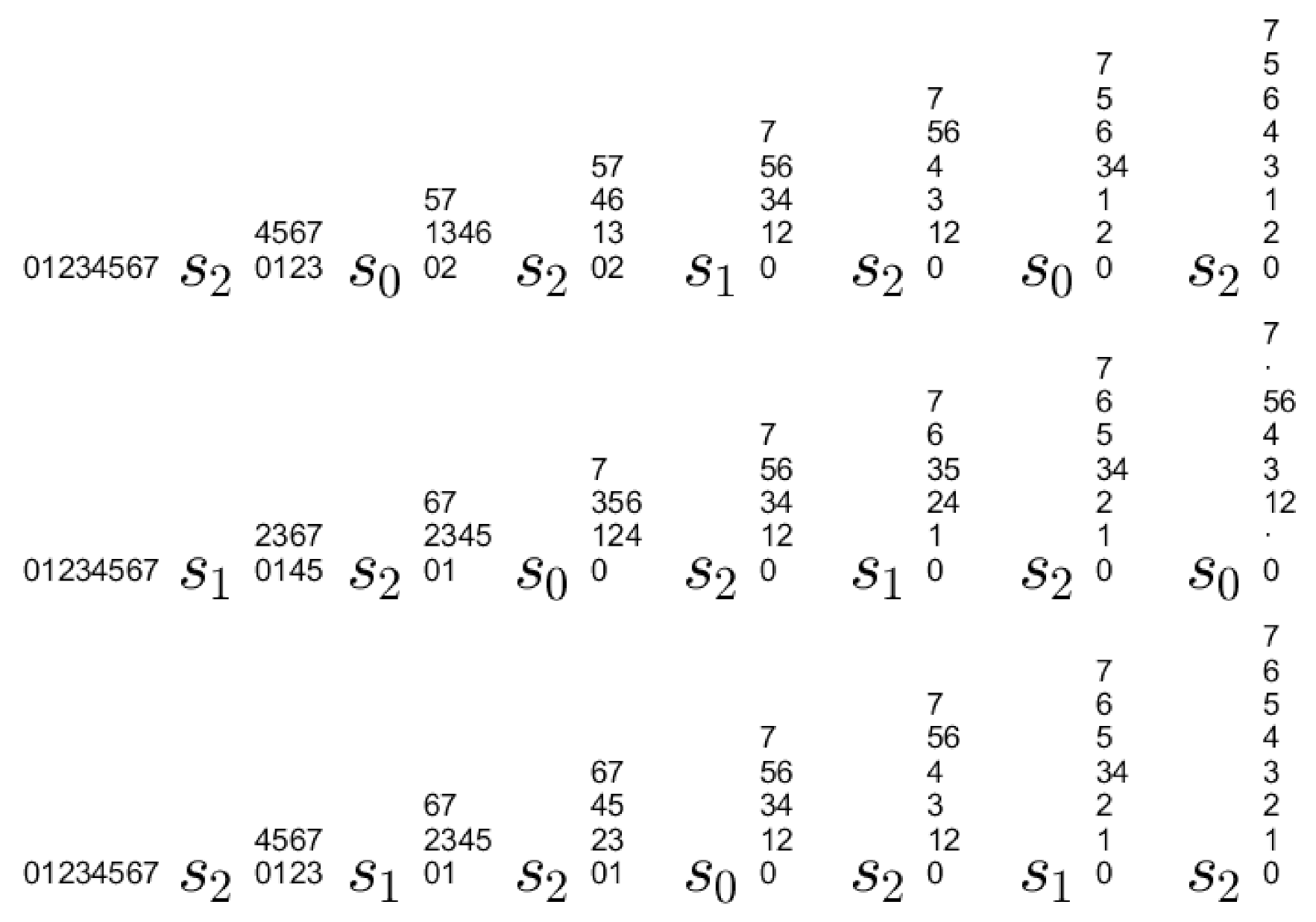
It is shown in
Figure 6 how the lines of slopes 0 to 7 are distributed by height for three possible bit boundaries as they travel to their right. Those bit boundaries would be the ones that would cross the lines depending if the origin point was at position 0, 1 or 2, in a problem of size
.
In the case depicted at the bottom—corresponding to starting from position 0—the first bit boundary, , breaks the group composed of the lines of slopes 0 to 7 into two groups: the lines with slopes 0 to 3 which do not ascend at that boundary, and the lines of slopes 4 to 7, that ascend because they have a 1 in the bit 2 of their slopes. The rest of the diagram can be interpreted in the same way. It can be seen that if we join the cells that contain each number from 0 to 7 with line segments we would obtain the 7 discrete lines of the DRT: lines that ascend in a ‘broken’ way but in an orderly fashion and that finish after traveling N positions to the right, having ascended what its slope determines: 0 to 7.
The shape of the impulse response will be determined by the number of lines that occupy each height at a certain distance, in this case, moving away from the starting point to the right (separated by square brackets) and ascending from height 0 (separated by commas inside the square brackets): , , , , , , , . For each distance u, we have u values that add to N which are palindromes.
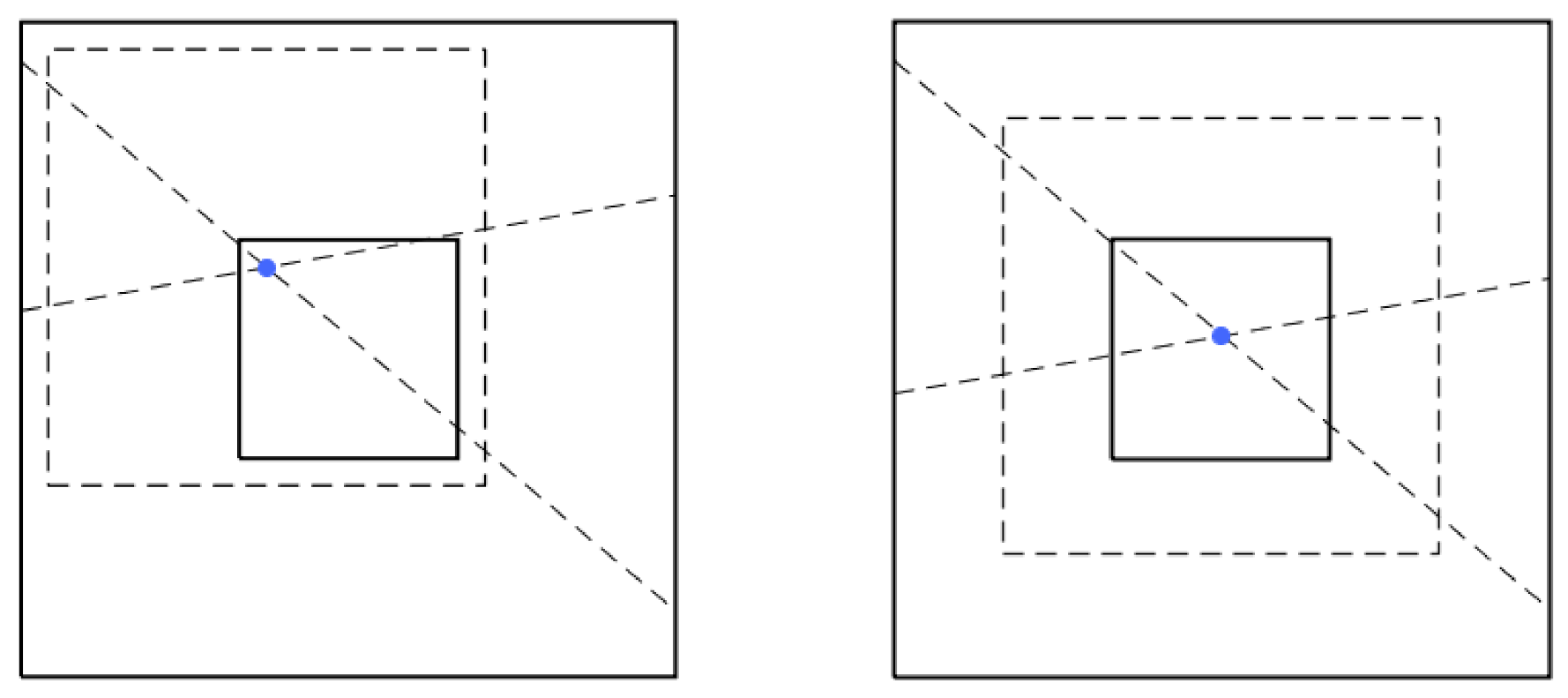
Considering the intermediate case, which simulates an impulse at position 1 (extended N+1), is equivalent to thinking of the boundaries for case 0 shifting to the left, with the disappearance of a and the appearance of a from the right. The impulse response will change with respect to the previous starting position, and we obtain: , , , , , , , .
However, in the next position, 2 (extended ), although the bit boundaries change with respect to both cases 0 and 1, the impulse response is the same as in case 0. This is because the roles of boundaries and are interchanged with respect to that case, but given that the path that each line follows does not matter but the number of lines crossing at each height, the final result in terms of impulse response is the same.
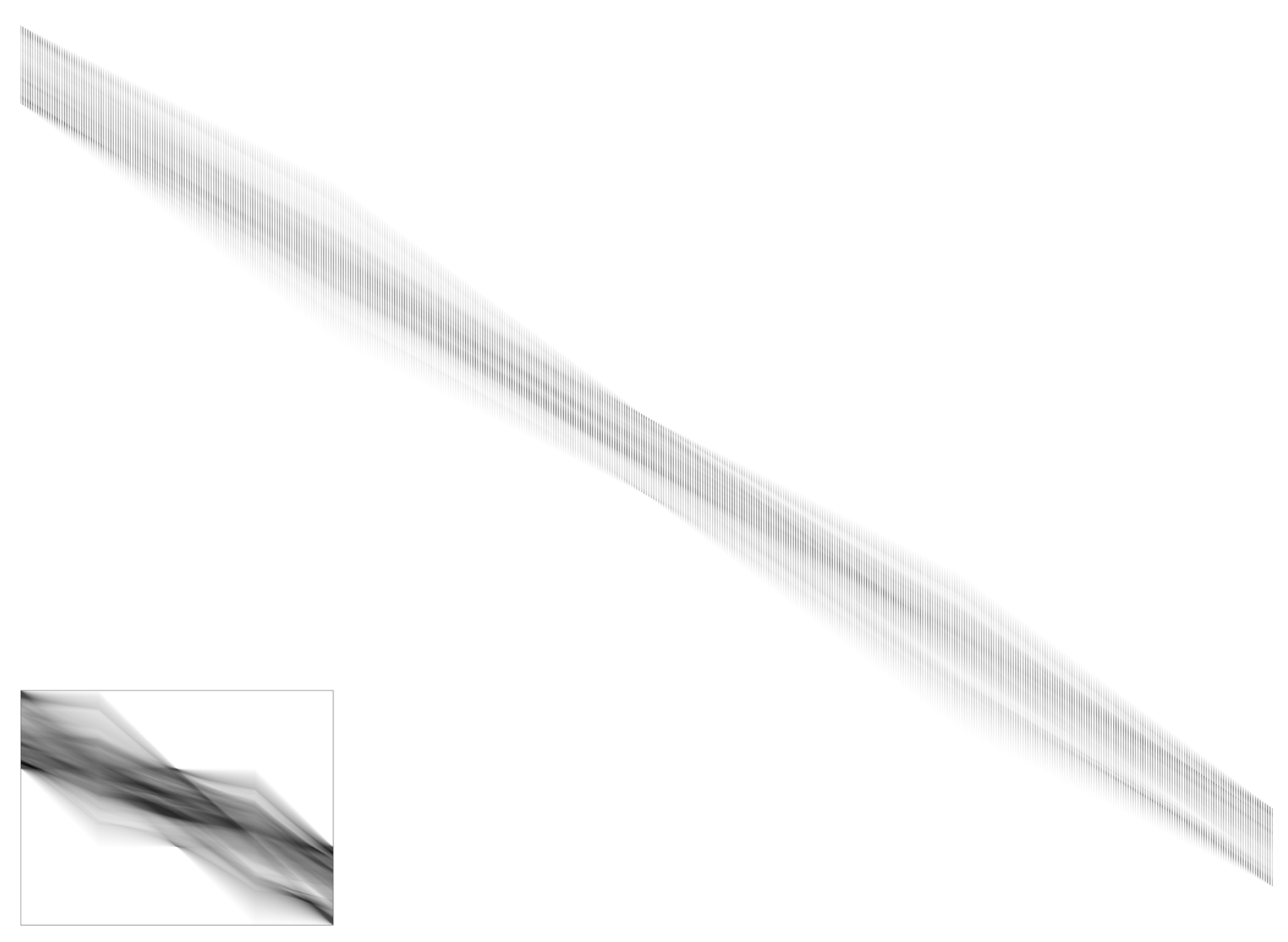
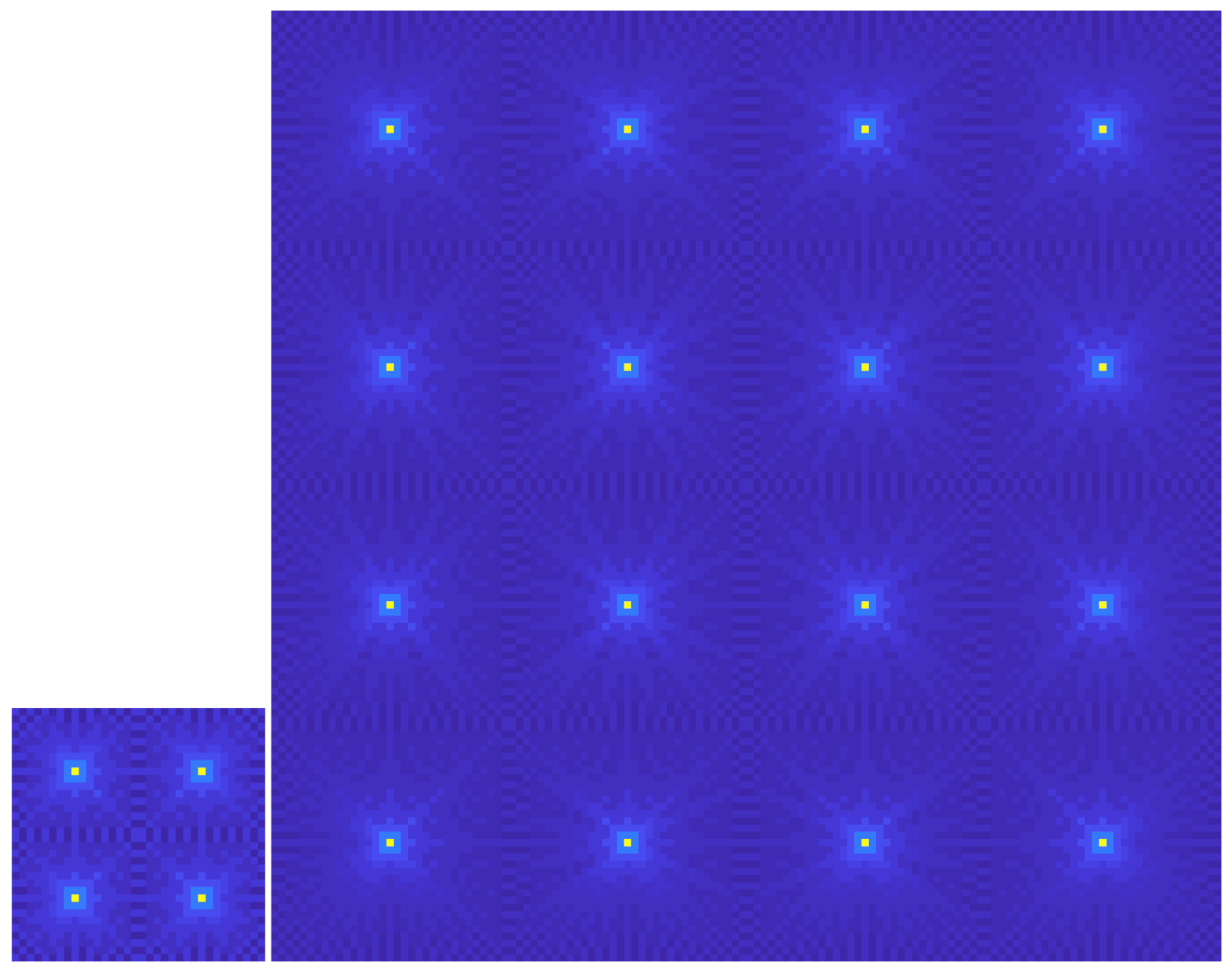
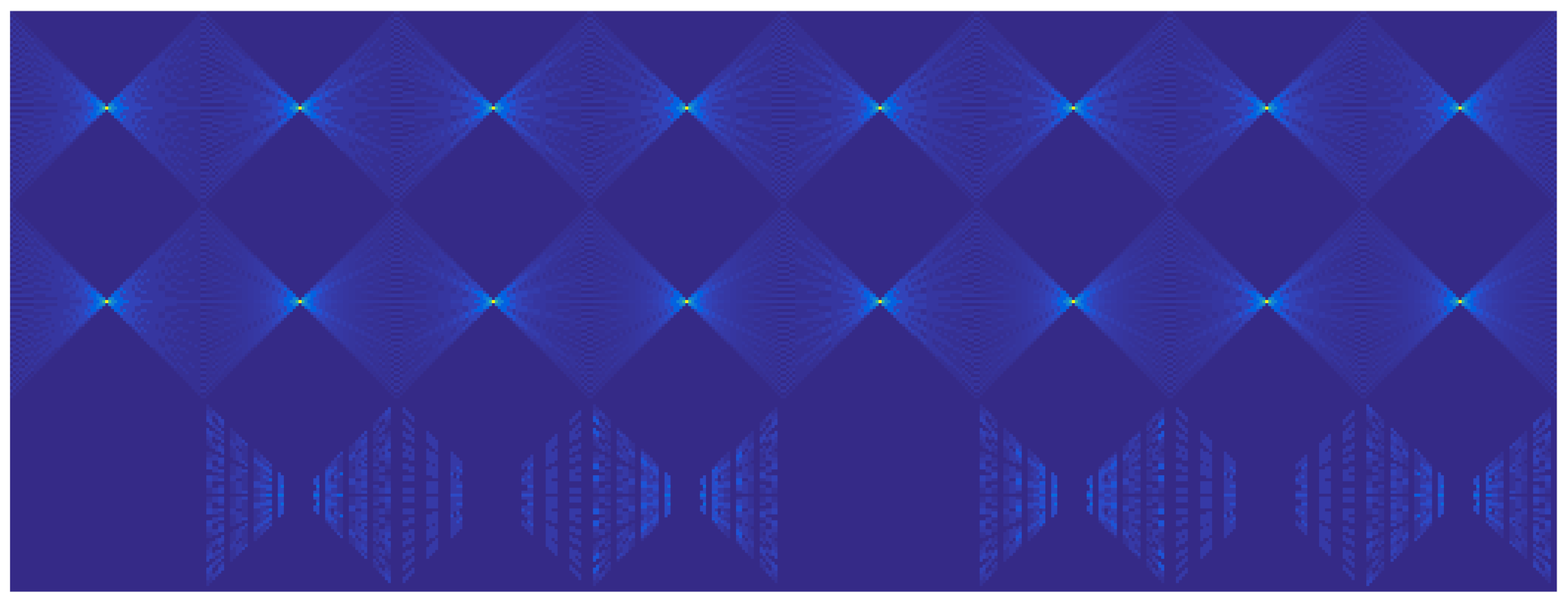
With the proposed adaptation from original slopes to extended ones, which replicates the two least significant bits of the slopes, we have managed to make the bits and equal to , and therefore a periodicity appears after displacements of the impulse starting position. After N/4 shifts, the bit boundaries repeat, only that swapping the roles of bits and . Therefore, the number of different impulse responses that we need to study will be . They will have size , in 2 dimensions: this is, the central value will be surrounded by values on each side; and characterize half the impulse response (only in one dimension). They form a kind of ‘butterfly’ which is different from zero only in the positions closer to the horizontal axis than it is to the vertical one. Examples of this sort of ‘butterflies’ will be shown later.
The total impulse response at position
will be the sum of the horizontal half-impulse response
with the horizontal transposed half-impulse response
, see
Figure 7, with (%) representing the remainder of integer division. It would have been more desirable to have only one impulse response, but at least we do not have
different ones. We have
, but can operate with
different ones given that they can be decomposed into horizontal and vertical, where they are the transposed versions of each other. We will see later that we can even lower this number if we allow the sacrifice of fidelity in the reconstruction.

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}