Development of a Throughflow-Based Simulation Tool for Preliminary Compressor Design Considering Blade Geometry in Gas Turbine Engine

Abstract
:1. Introduction
2. Materials and Methodologies
2.1. Throughflow Analysis Tool
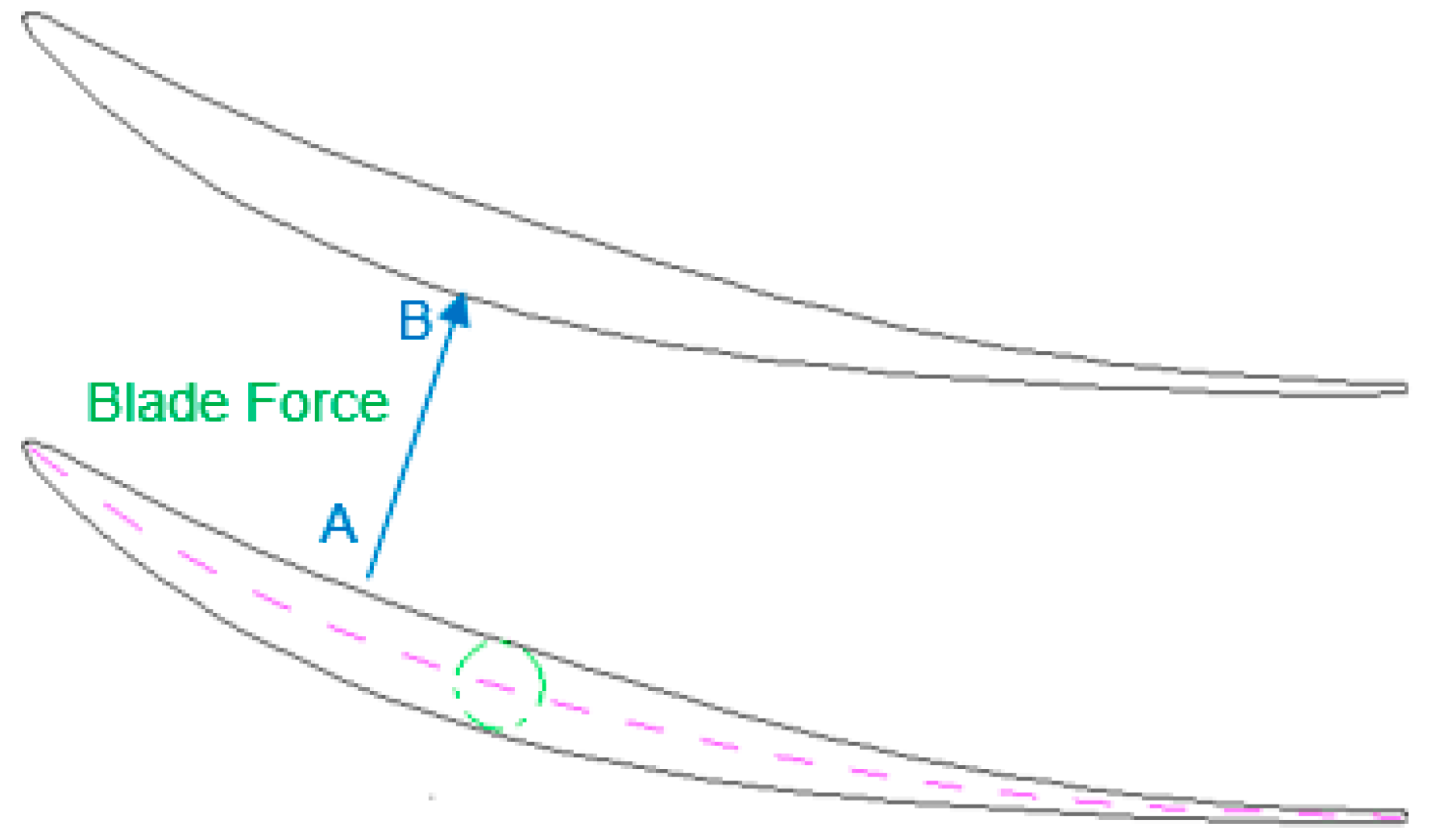
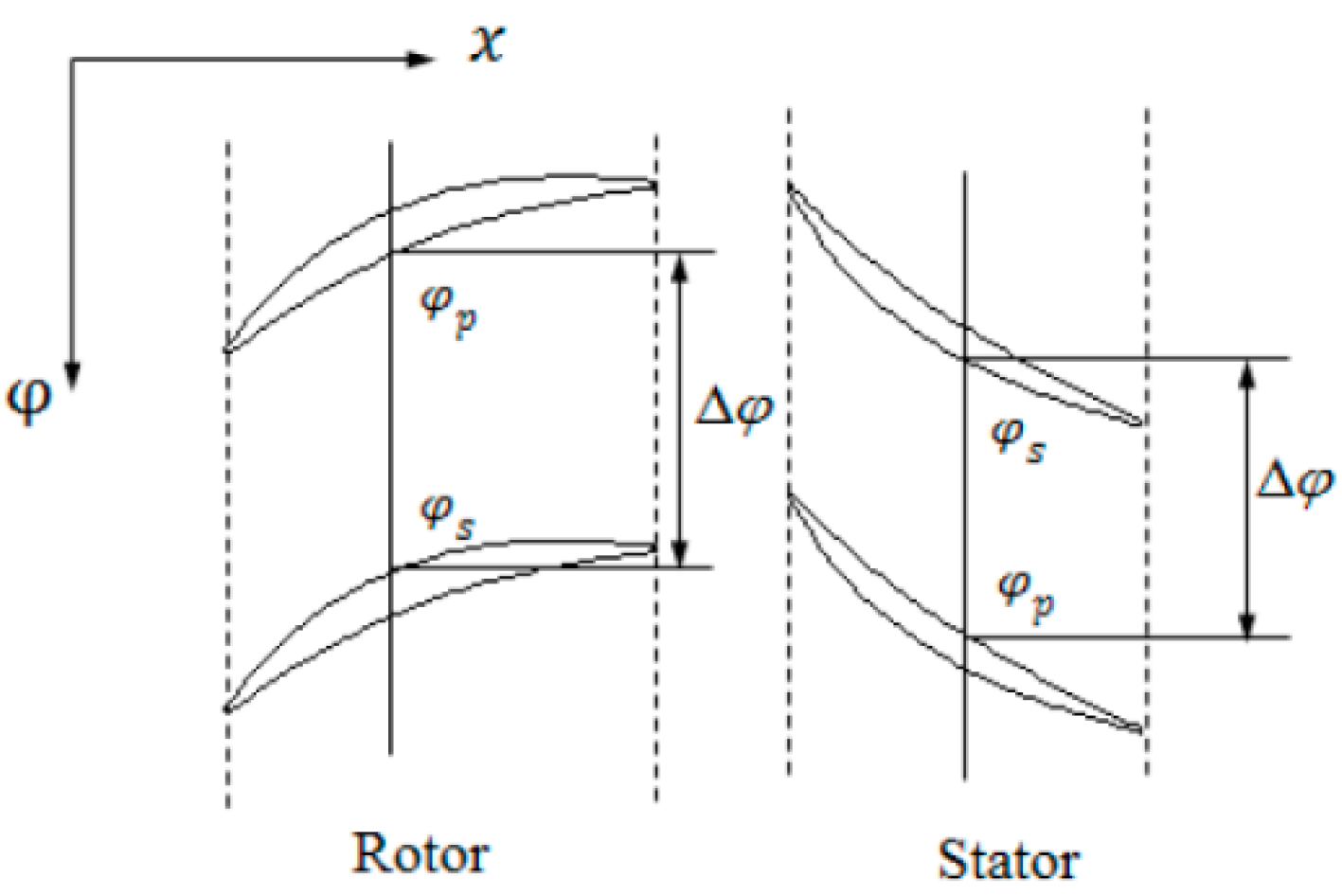
2.2. Development of the Inviscid Blade Force
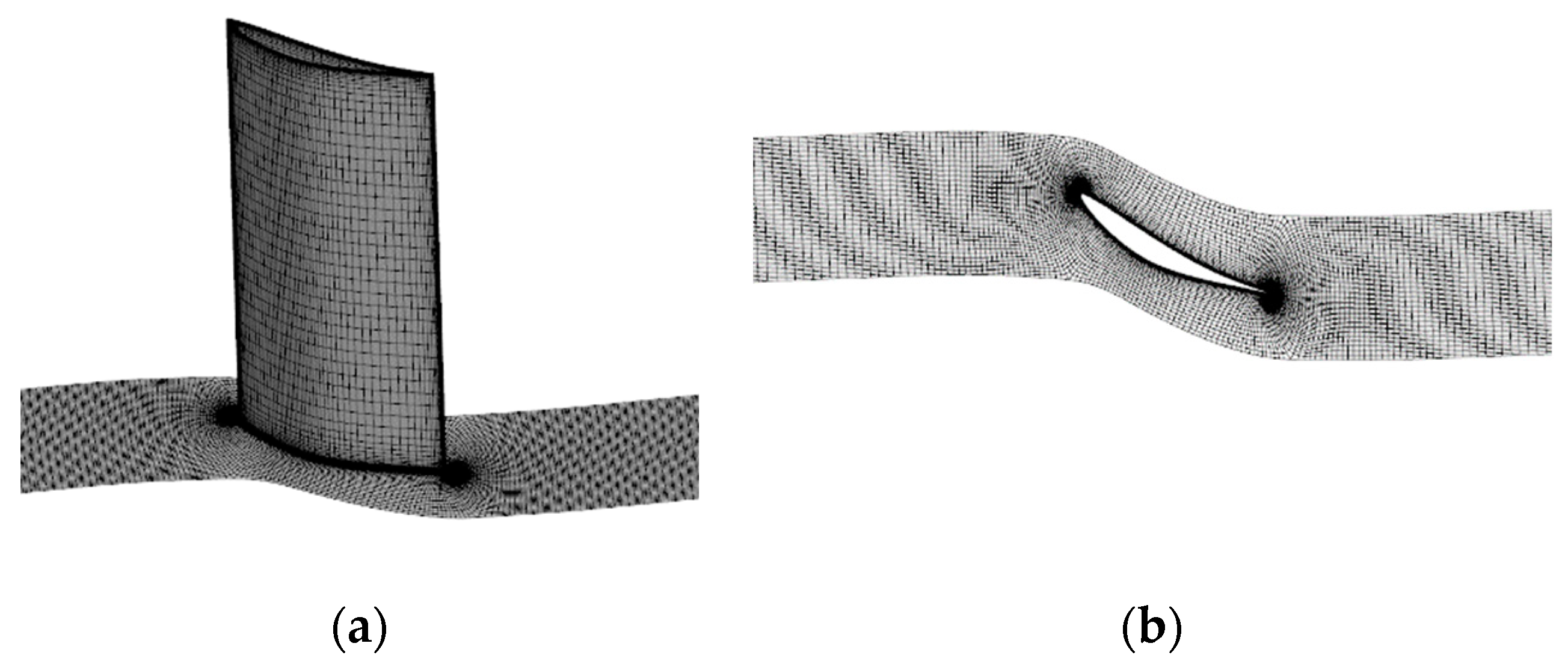
2.3. 3D CFD Method Verification
3. Modeling of the Inviscid Blade Force Based on a Linear Cascade
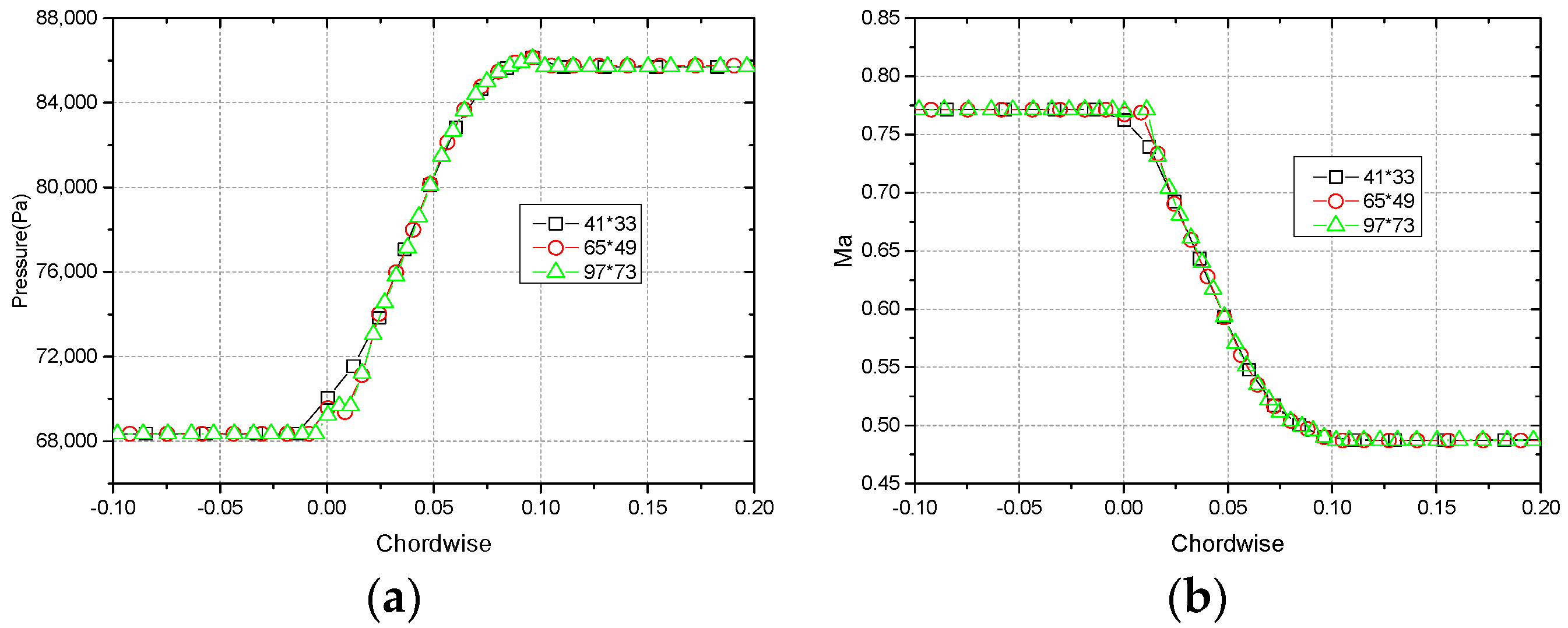
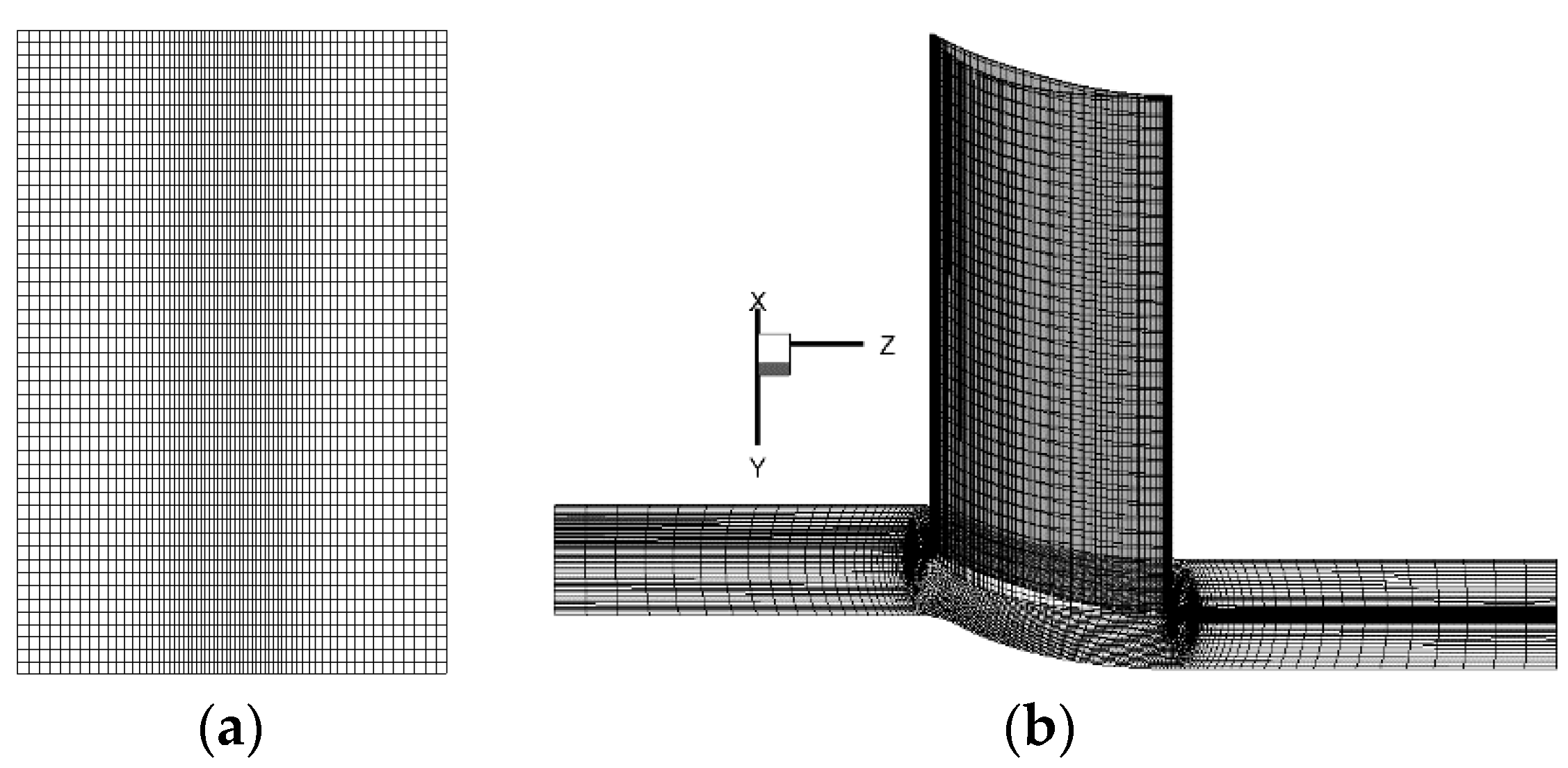
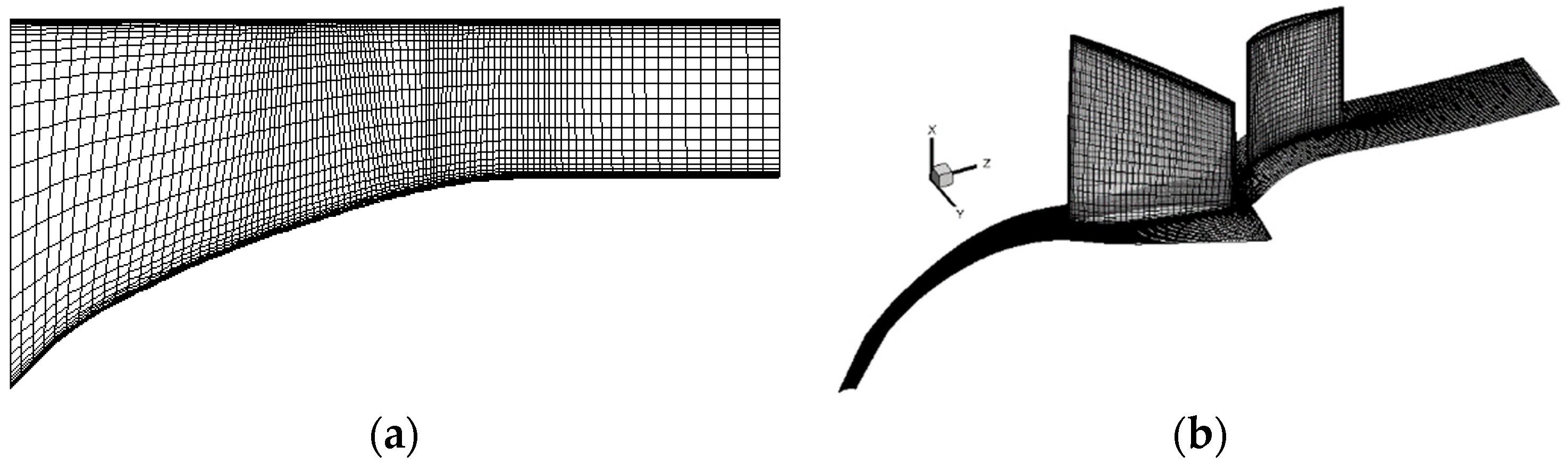
3.1. Grid Independence Verification
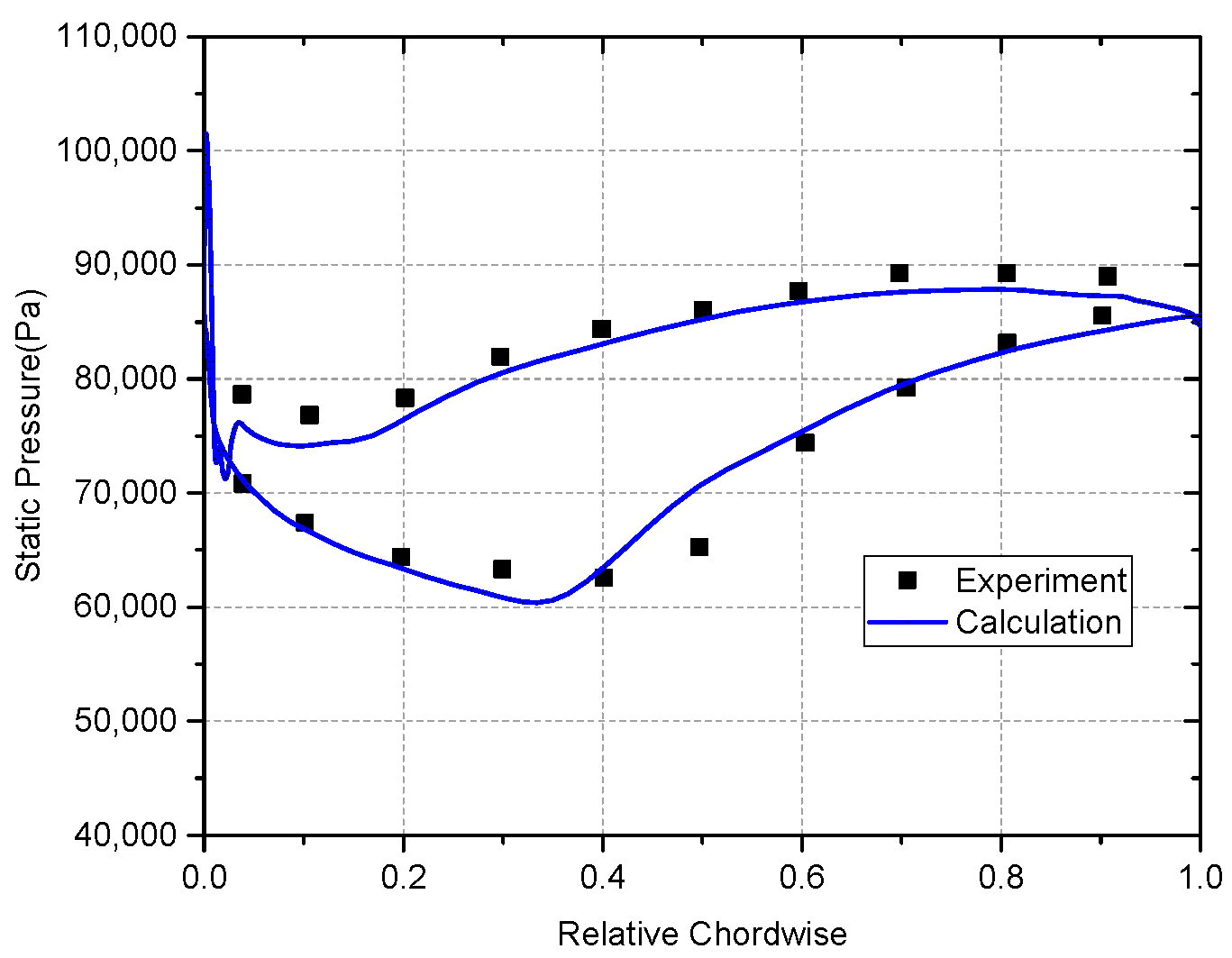
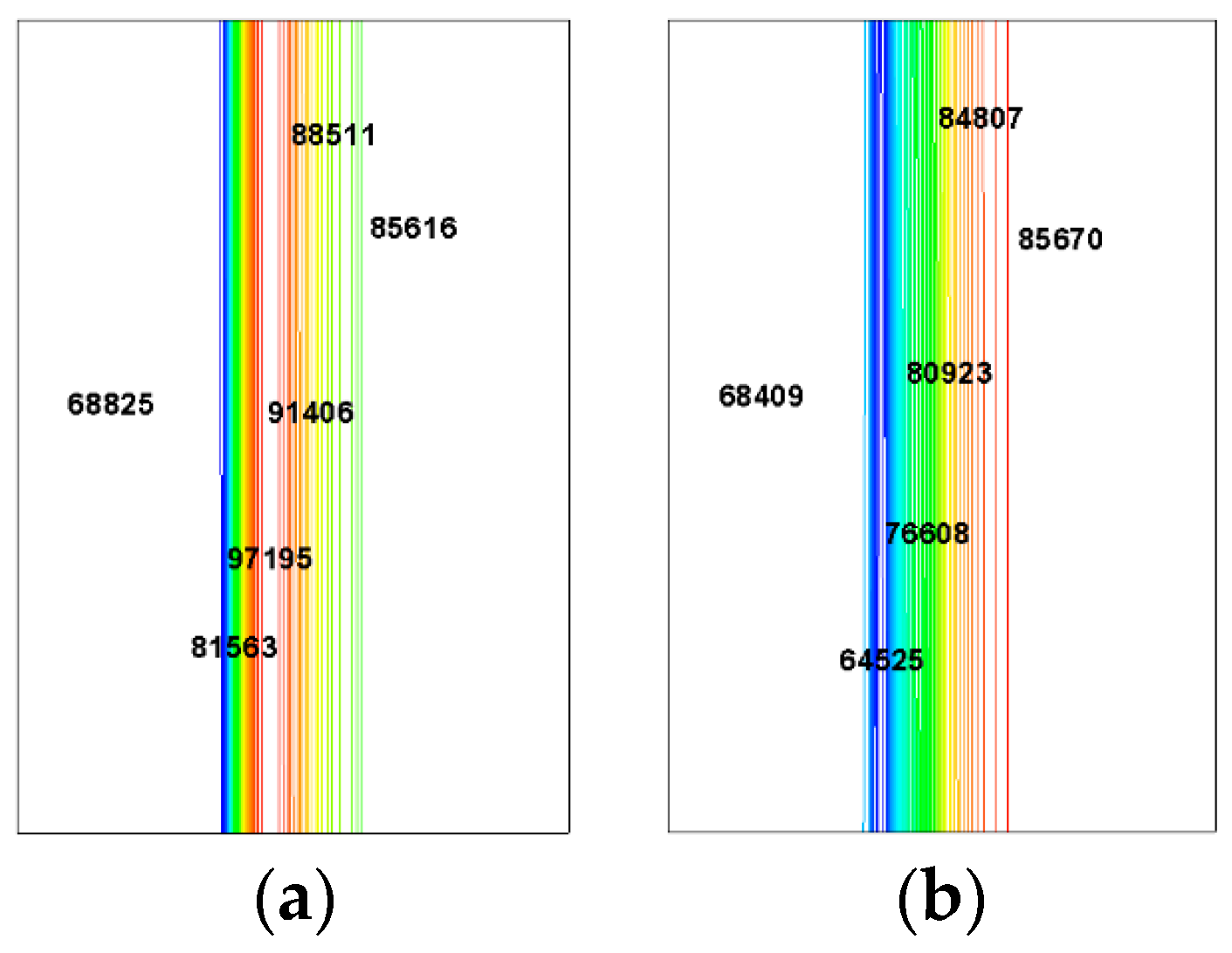
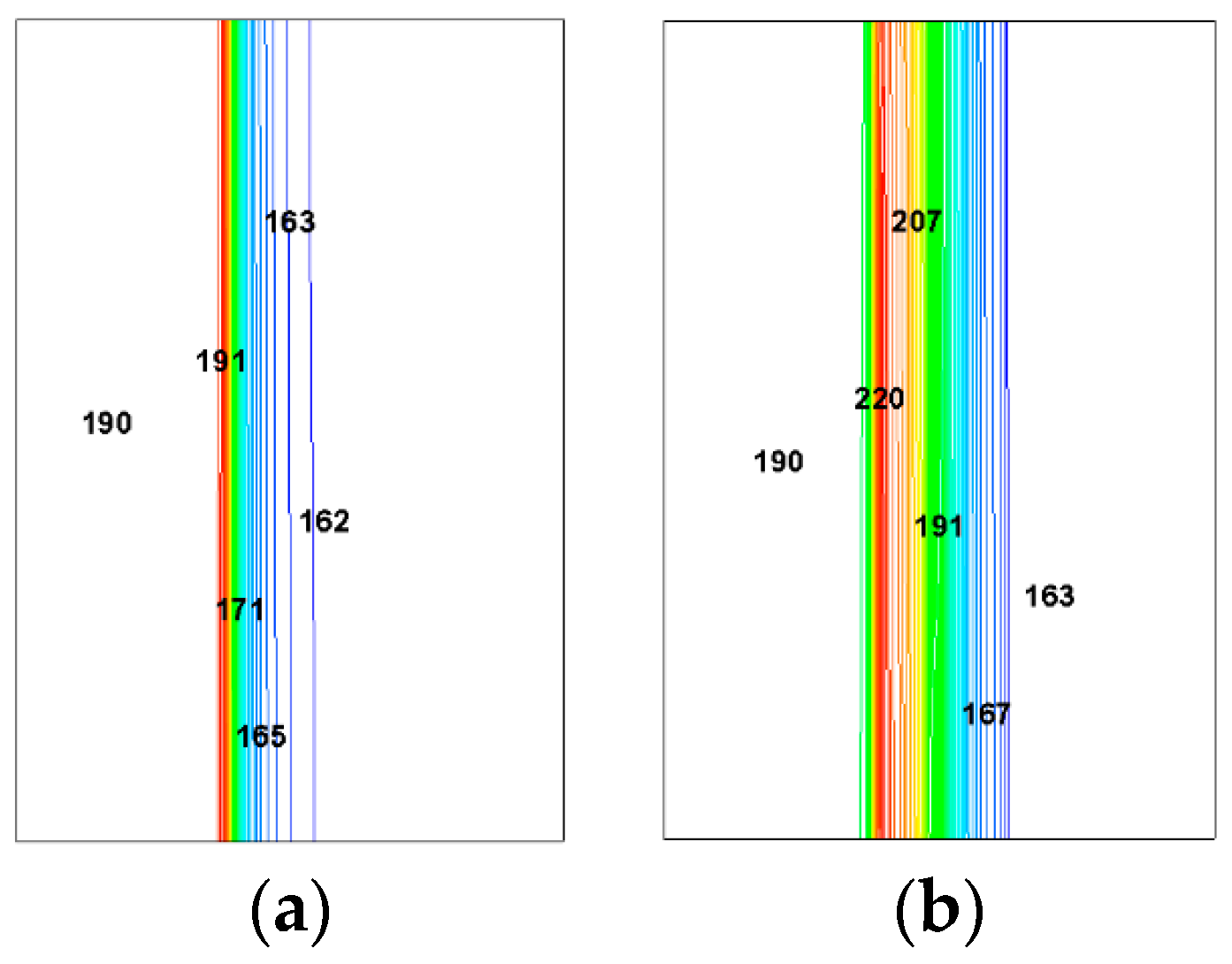
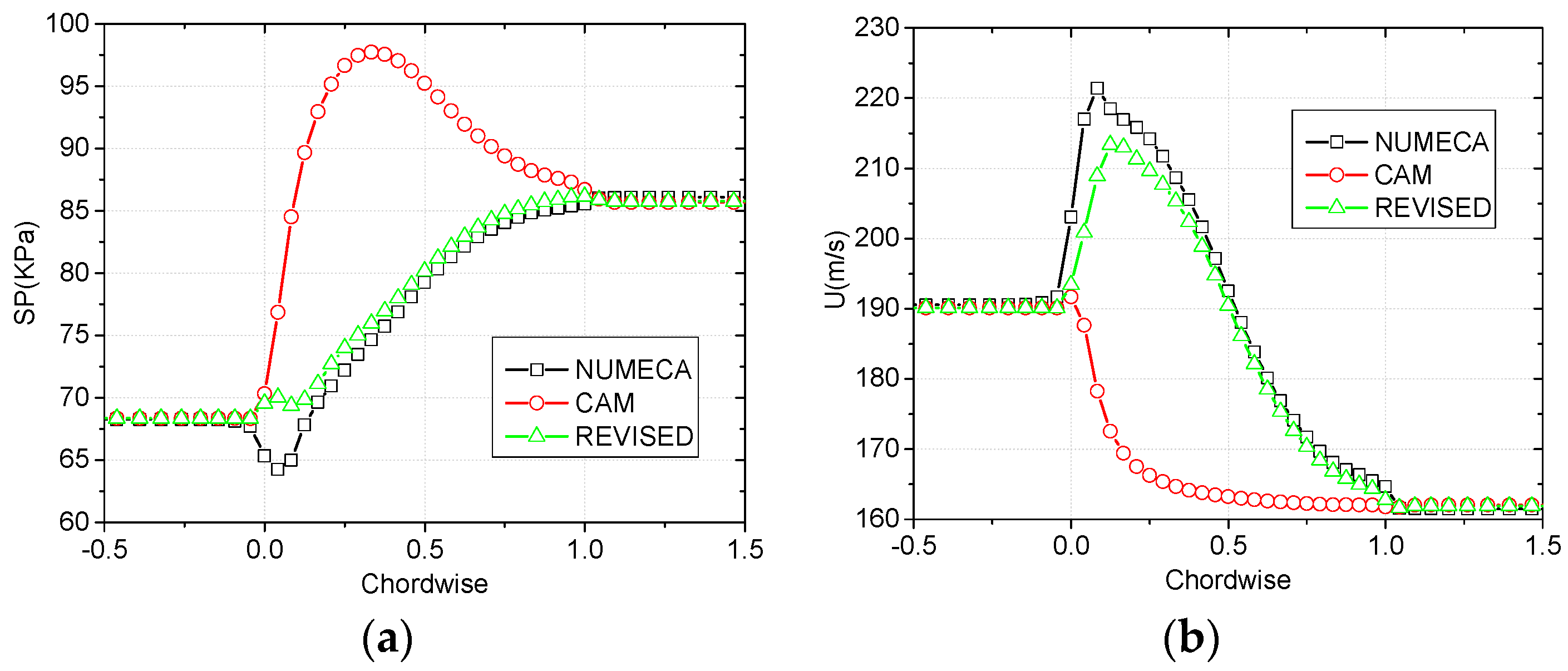
3.2. Model Analysis on the Subsonic Condition
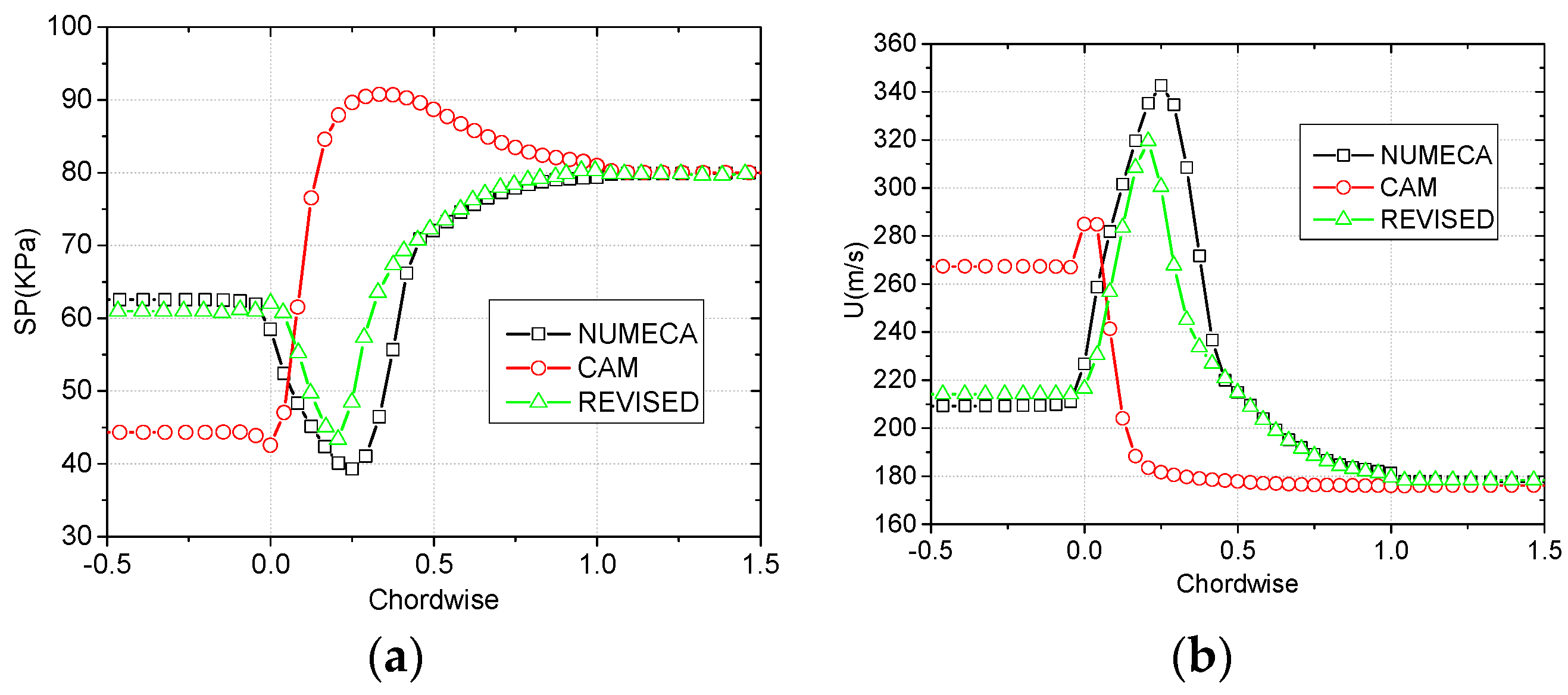
3.3. Model Analysis on the Transonic Condition
4. Application of the Improved Inviscid Blade Force Model in a Highly Loaded Low-Speed Fan
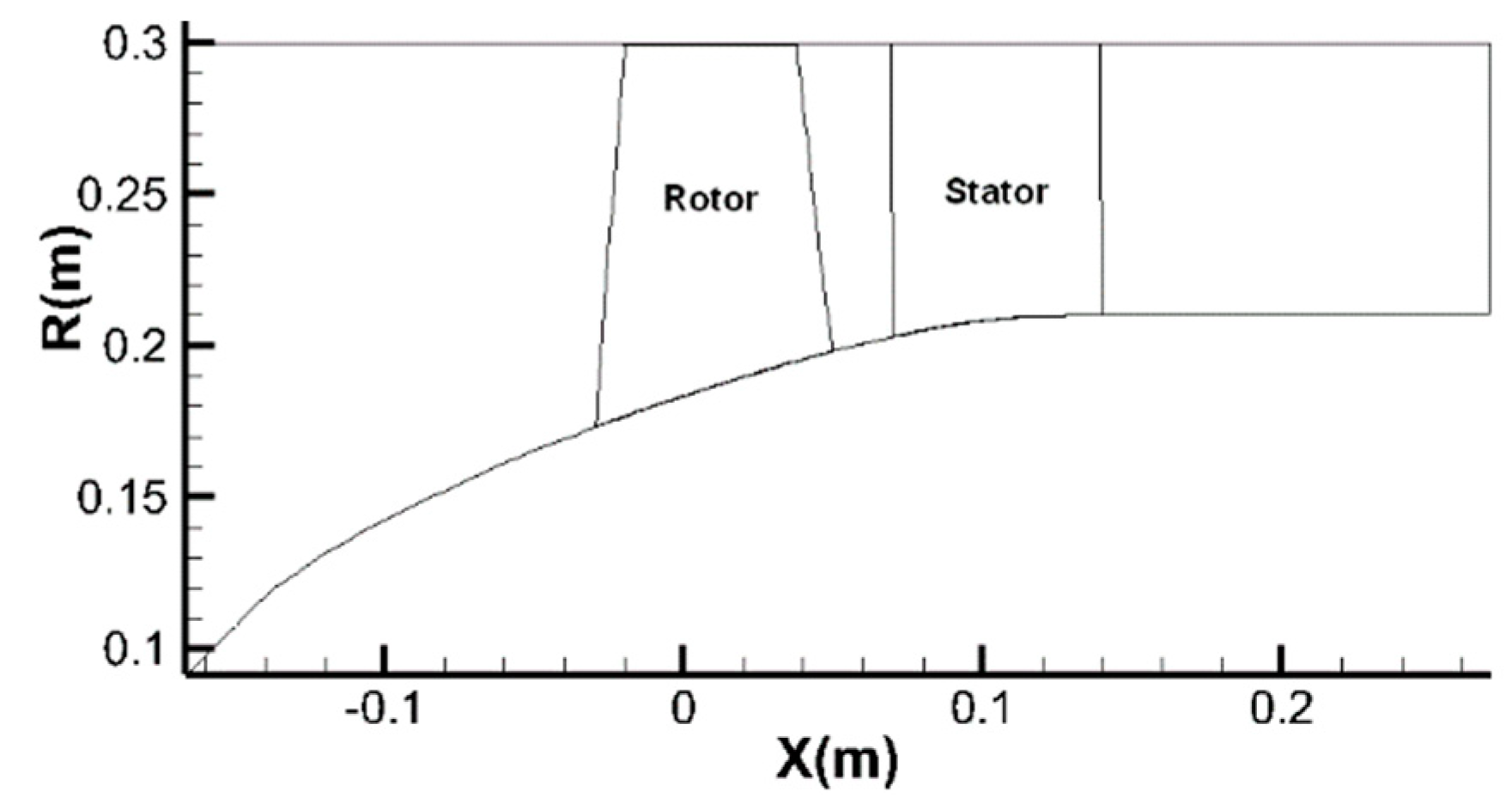
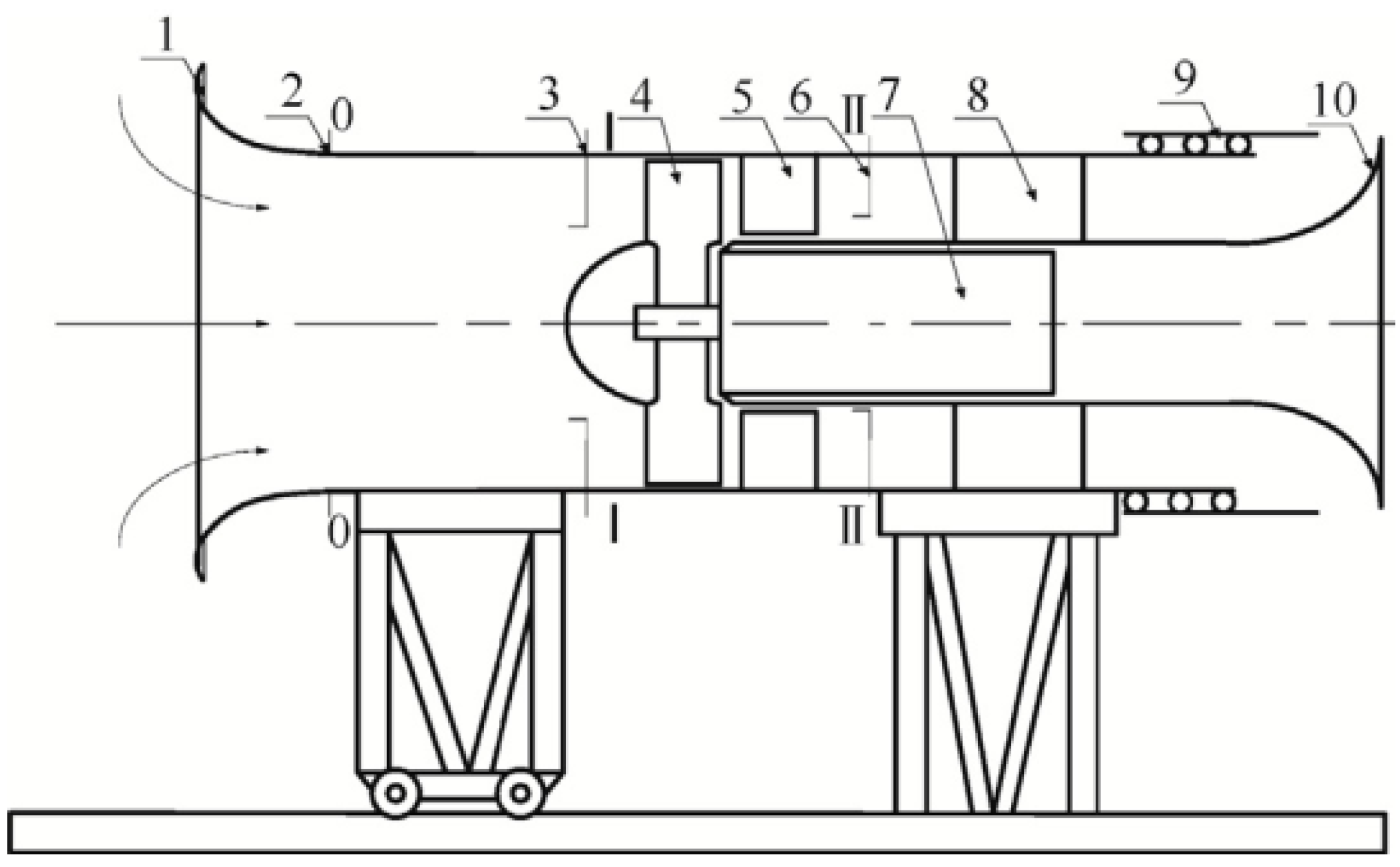
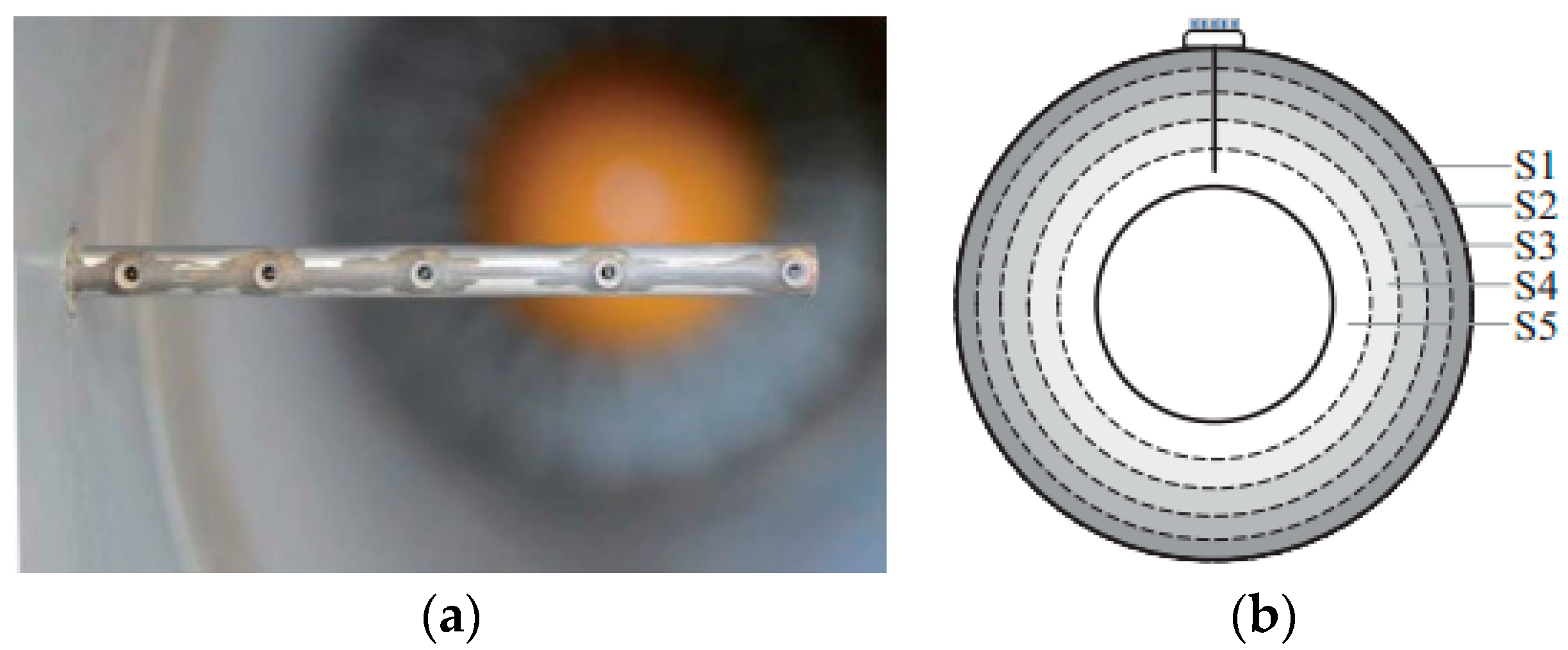
4.1. Experimental Facility
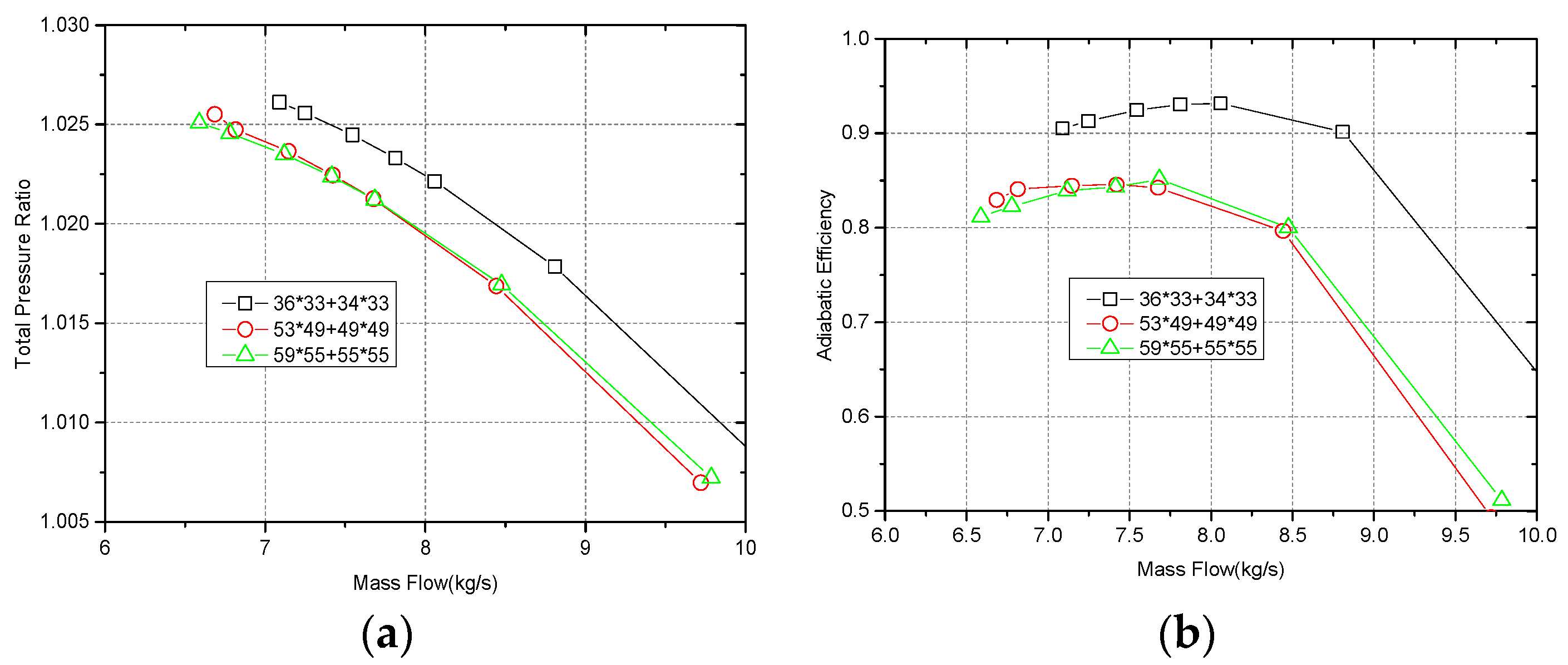
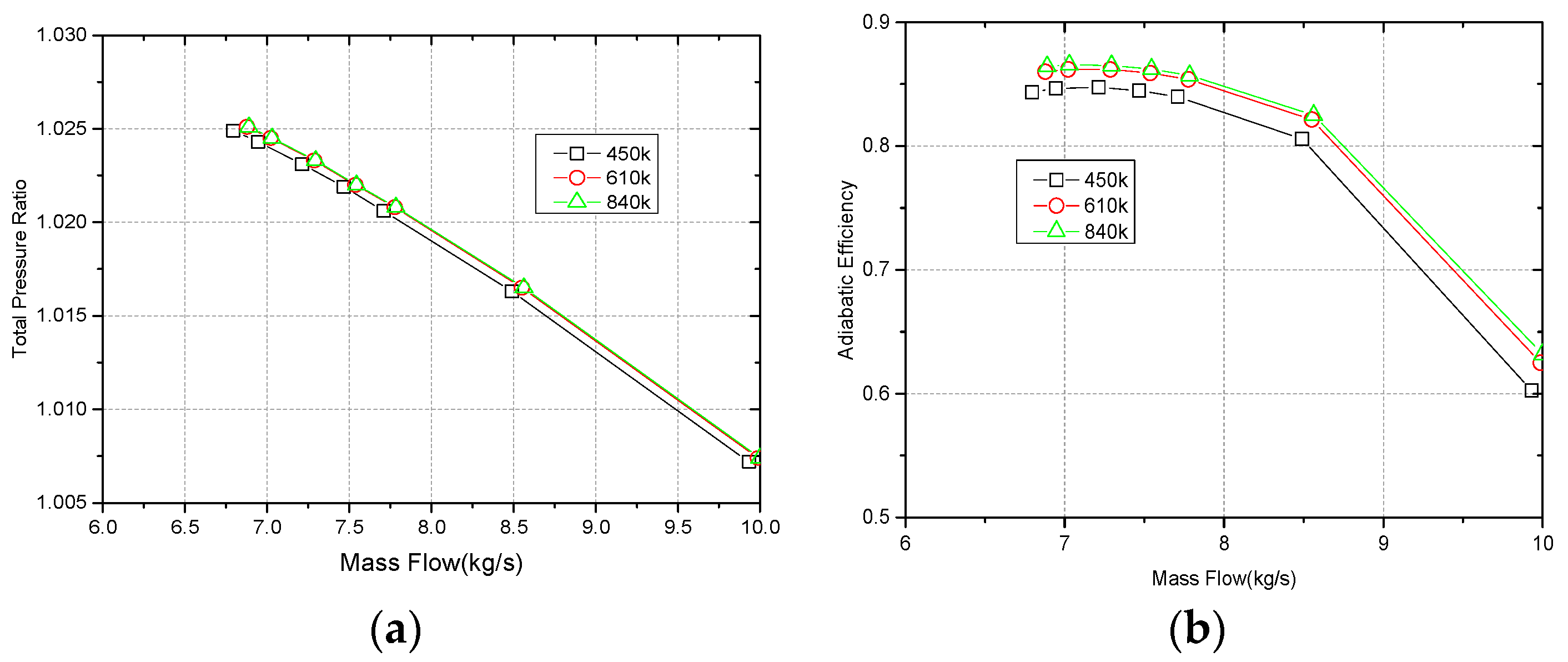
4.2. Grid Independence Verification
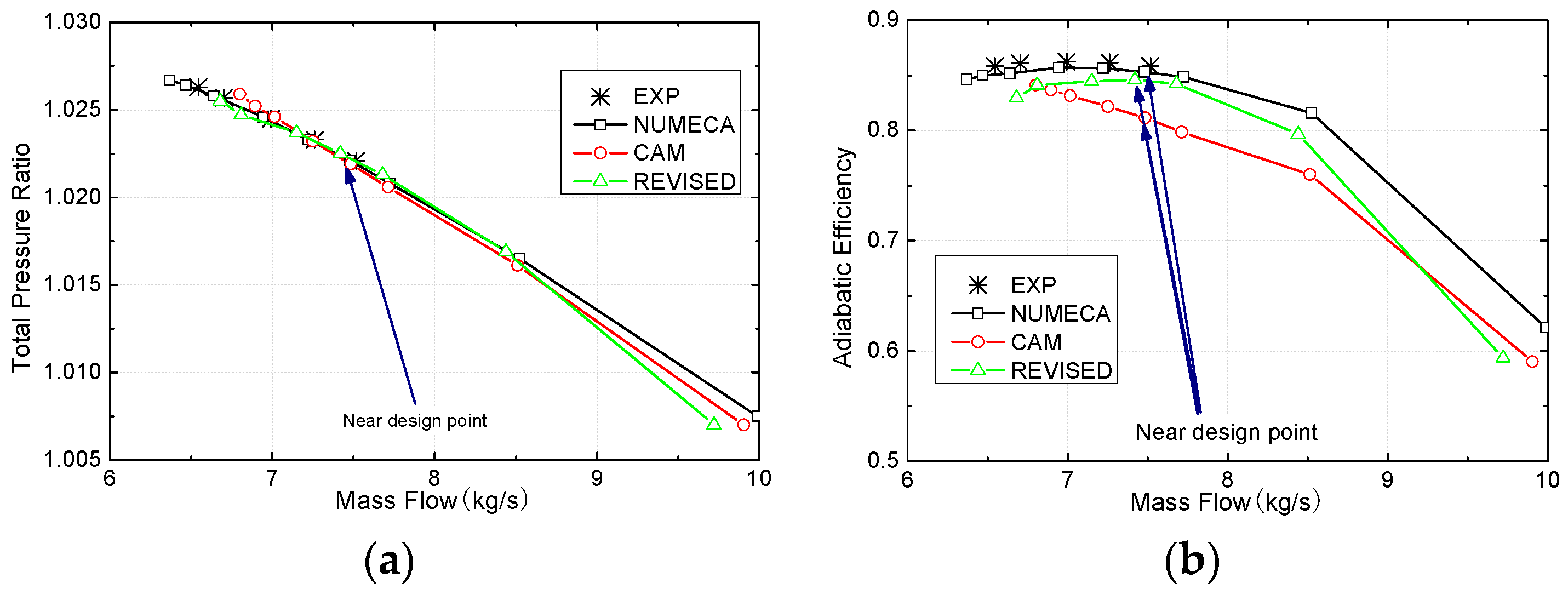
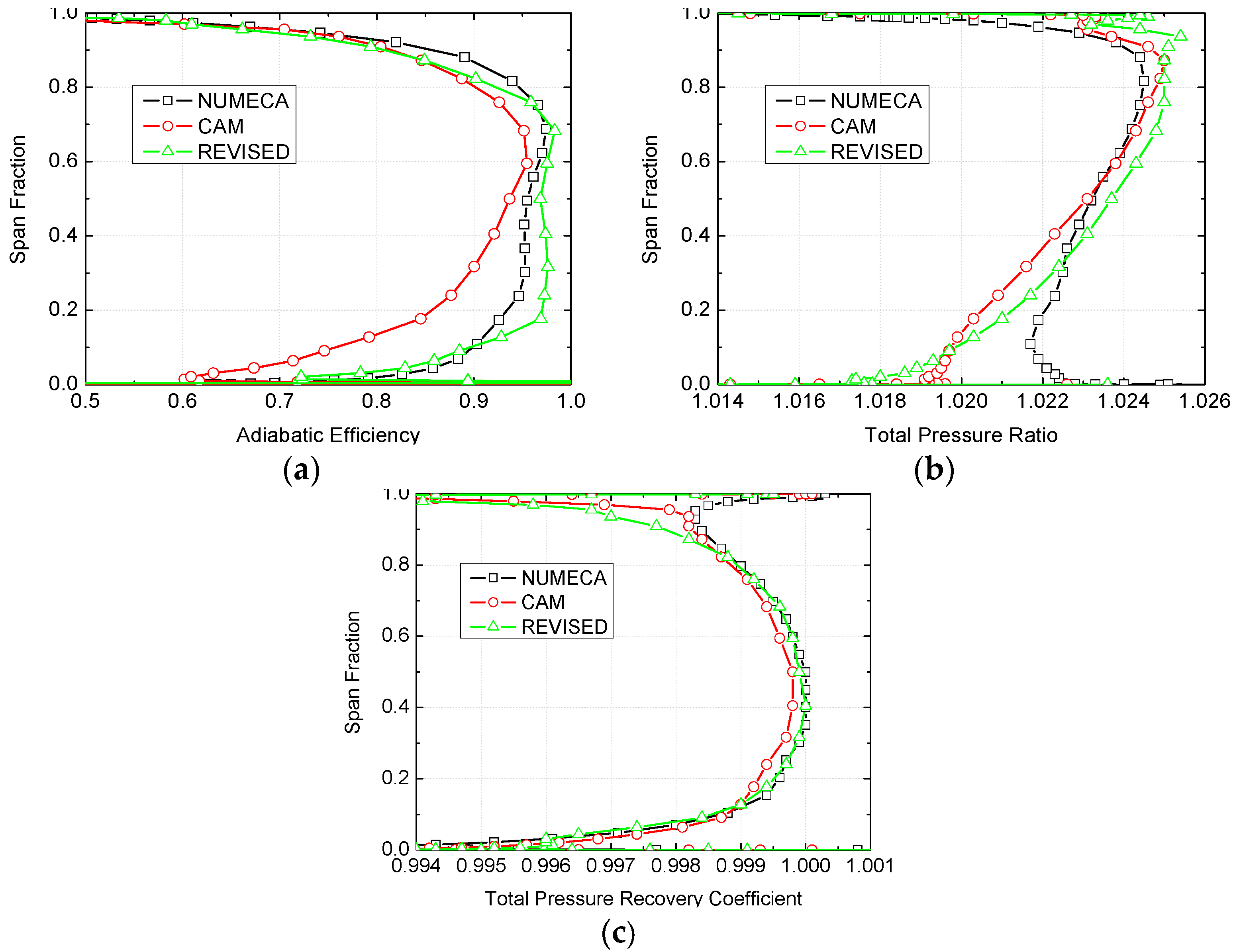
4.3. Numerical Analysis and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| blockage factor | radial coordinate (m) | ||
| specific heat at constant volume | vectors of source terms | ||
| total internal energy (J) | temperature | ||
| vectors of conservative variables | trailing edge | ||
| vectors of viscous fluxes | vectors of conservative variables | ||
| inviscid blade force | relative velocity (m/s) | ||
| viscous blade force | axial coordinate (m) | ||
| total enthalpy (J) | density (kg/m3) | ||
| leading edge | rotating speed (rad/s) | ||
| number of blades | viscous stress tensor | ||
| pressure (Pa) | circumferential coordinate (rad) angular coordinate on the blade | ||
| heat flux | |||
| some flow parameter | |||
| Subscripts | Superscripts | ||
| axial, radial and circumferential | ′ | non-axisymmetric terms | |
| components | ″ | non-axisymmetric terms | |
| suction surface | (density-weighted) | ||
| pressure surface | – | circumferential average parameter | |
| = | circumferential average parameter (density-weighted) | ||
References
- Feng, W. Whole Aero-Engine Meshing and CFD Simulation. Ph.D. Thesis, Imperial College, London, UK, 2013. [Google Scholar]
- Sajedin, A.; Shojaeefard, M.H.; Khalkhali, A. Radial Gradient Pressure Effects on Flow Behavior in a Dual Volute Turbocharger Turbine. Appl. Sci. 2018, 8, 1961. [Google Scholar] [CrossRef] [Green Version]
- Li, P.Y.; Gu, C.W.; Song, Y. A New Optimization Method for Centrifugal Compressors Based on 1D Calculations and Analyses. Energies 2015, 8, 4317–4334. [Google Scholar] [CrossRef]
- Medic, G.; You, D.; Kalitzin, G.; Marcus, H.; Frank, H.; Heinz, P.; van der Weide, E.; Alonso, J. Intergrated Computations of an Entire Jet Engine; ASME Paper No. GT2007-27094; American Society of Mechanical Engineers (ASME): Montreal, QC, Canada, 2007. [Google Scholar]
- Schlüter, J.U.; Pitsch, H.; Moin, P.; Shankaran, S.; Kim, S.; Alonso, J. Towards Multi-Component Analysis of Gas Turbines by CFD: Integration of RANS and LES Flow Solvers; American Society of Mechanical Engineers (ASME): New York, NY, USA, 2003. [Google Scholar]
- Schlüter, J.U.; Pitsch, H.; Moin, P. Large-eddy Simulation Inflow Conditions for Coupling with Reynolds-averaged Flow Solvers. AIAA J. 2004, 42, 478–484. [Google Scholar] [CrossRef]
- Medic, G.; Kalitzin, G.; You, D.; Herrmann, M.; Ham, F.; van der Weide, E.; Pitsch, H.; Alons, J. Integrated RANS/LES Computations of Turbulent Flow through a Turbofan Jet Engine. Annu. Res. Briefs 2006, 275–285. Available online: https://xueshu.baidu.com/usercenter/paper/show?paperid=d40f6dade92099fbba98506dd173abdf&site=xueshu_se (accessed on 5 November 2020).
- Schlüter, J.U.; Wu, X.; Kim, S.; Shankaran, S.; Alonso, J.J.; Pitsch, H. A Framework for Coupling Reynolds-Averaged with Large-Eddy Simulations for Gas Turbine Applications. ASME J. Fluids Eng. 2005, 127, 806–815. [Google Scholar] [CrossRef]
- Horlock, J.H.; Denton, J.D. A review of Some Early Design Practice Using Computational Fluid Dynamics and a Current Perspective. Trans. ASME J. Turbomach. 2005, 127, 5–13. [Google Scholar] [CrossRef]
- Smith, L.H., Jr. The radial-equilibrium equation of turbomachinery. J. Eng. Power Trans. ASME 1966, 88, 1–12. [Google Scholar] [CrossRef]
- Baralon, S.; Erikson, L.E.; Hall, U. Viscous Throughflow Modelling of Transonic Compressors Using a Time-Marching Finite-Volume Solver. In Proceedings of the 13th International Symposium on Airbreathing Engines (ISABE), Chattanooga, TN, USA, 7–12 September 1997. [Google Scholar]
- Simon, J.F.; Leonard, O. A Throughflow Analysis Tool Based on the Navier-Stokes Equations. In Proceedings of the 6th European Turbomachinery Conference, Lille, France, 7–11 March 2005. [Google Scholar]
- Sturmayr, A.; Hirsch, C. Shock Representation by Euler Throughflow Models and Comparison with Pitch-Averaged Navier-Stokes Solutions; ISABE 99-7281; PN Publications: Florence, Italy, 1999. [Google Scholar]
- Dawes, W.N. Toward Improved Throughflow Capability: The Use of Three Dimensional Viscous Flow Solvers in a Multistage Environment. Trans. ASME J. Turbomach. 1992, 114, 8–17. [Google Scholar] [CrossRef]
- Jin, H.L.; Jin, D.H.; Li, X.J.; Gui, X. A Time-Marching Throughflow Model and its Application in Transonic Axial Compressor. J. Therm. Sci. 2010, 19, 519–525. [Google Scholar] [CrossRef]
- Edwards, J.R. A Low-Diffusion Flux-Splitting Scheme for Navier-Stokes Calculations. Comput. Fluids 1997, 26, 635–659. [Google Scholar] [CrossRef]
- Sturmayr, A.; Hirsch, C. Throughflow Model for Design and Analysis Integrated in a Three-Dimensional Navier–Stokes Solver. J. Power Energy 1999, 213, 263–273. [Google Scholar] [CrossRef]
- Simon, J.F. Contribution to Throughflow Modelling for Axial Flow Turbomachines. Ph.D. Thesis, University of Liege, Liege, Belgium, 2007. [Google Scholar]
- Steinert, W.; Eisenberg, B.H. Design and Testing of a Controlled Diffusion Airfoil Cascade for Industrial Axial Flow Compressor Application. J. Turbomach. 1991, 113, 583–590. [Google Scholar] [CrossRef]
- Sturmayr, A. Evolution of a 3D Structured Navier-Stokes Solver towards Advanced Turbomachinery Applications. Ph.D. Thesis, Vrije Universiteit Brussel, Brussels, Belgium, 2004. [Google Scholar]
- Baralon, S.; Eriksson, L.-E.; Hall, U. Validation of a Throughflow TimeMarching Finite-Volume Solver for Transonic compressors. In Proceedings of the ASME 1998 International Gas Turbine and Aeroengine Congress and Exhibition, 98-GT-74, Stockholm, Sweden, 2–5 June 1998. [Google Scholar]
- Yao, Z.; Hirsch, C. Throughflow Model Using 3D Euler or Navier-Stokes Solver. In Proceedings of the 1st European Conference on Turbomachinery Fluid Dynamics and Thermodynamics, Eerlangen, Germany, 1–3 March 1995. [Google Scholar]
- Wan, K.; Jin, H.L.; Jin, D.H.; Gui, X.M. Influence of Non-Axisymmetric Terms on Circumferentially Averaged Method in Fan/Compressor. J. Therm. Sci. 2013, 22, 13–22. [Google Scholar] [CrossRef]
- Tang, M.Z.; Jin, D.H.; Gui, X.M. Modeling and numerical investigation of the inlet circumferential fluctuations of swept and bowed blades. J. Therm. Sci. 2017, 26, 1–10. [Google Scholar] [CrossRef]
- Xu, D.; Xiaohua, L.; Sun, D.; Sun, X. Experimental investigation on SPS casing treatment with bias flow. Chin. J. Aeronaut. 2014, 27, 1352–1362. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Chord | 100 mm |
| Blade geometric inlet angle | |
| Stagger angle | |
| Aspect ratio of the cascade | 6.0 |
| Solidity | 2.15 |
| Geometrical Parameter | Value | |
|---|---|---|
| Rotor | Stator | |
| Number of blades | 20 | 27 |
| Tip diameter (mm) | 600 | 600 |
| Hub diameter (mm) | 346 | 401 |
| Stagger angle at the hub (°) | 45 | 0 |
| Aspect ratio | 1.18 | 1.40 |
| Mass Flow (kg/s) | Pressure Ratio | Adiabatic Efficiency | Power (kW) | Power Error (%) | |
|---|---|---|---|---|---|
| Experiment | 7.516 | 1.022 | 0.8583 | 15.81 | |
| NUMECA | 7.480 | 1.022 | 0.8531 | 15.83 | 0.128 |
| CAM | 7.485 | 1.022 | 0.8113 | 16.66 | 5.357 |
| Revised CAM | 7.421 | 1.022 | 0.8457 | 15.84 | 0.207 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Wan, K.; Jin, D.; Gui, X. Development of a Throughflow-Based Simulation Tool for Preliminary Compressor Design Considering Blade Geometry in Gas Turbine Engine. Appl. Sci. 2021, 11, 422. https://doi.org/10.3390/app11010422
Liu X, Wan K, Jin D, Gui X. Development of a Throughflow-Based Simulation Tool for Preliminary Compressor Design Considering Blade Geometry in Gas Turbine Engine. Applied Sciences. 2021; 11(1):422. https://doi.org/10.3390/app11010422
Chicago/Turabian StyleLiu, Xiaoheng, Ke Wan, Donghai Jin, and Xingmin Gui. 2021. "Development of a Throughflow-Based Simulation Tool for Preliminary Compressor Design Considering Blade Geometry in Gas Turbine Engine" Applied Sciences 11, no. 1: 422. https://doi.org/10.3390/app11010422