Abstract
The development of autonomous ship technology is currently in focus worldwide and the literature on this topic is growing. However, an in-depth cost and benefit estimation of such endeavours is in its infancy. With this systematic literature review, we present the state-of-the-art system regarding costs and benefits of the operation of prospective autonomous merchant ships with an objective for identifying contemporary research activities concerning an estimation of operating, voyage, and capital costs in prospective, autonomous shipping and vessel platooning. Additionally, the paper outlines research gaps and the need for more detailed business models for operating autonomous ships. Results reveal that valid financial models of autonomous shipping are lacking and there is significant uncertainty affecting the cost estimates, rendering only a reliable evaluation of specific case studies. The findings of this paper may be found relevant not only by academia, but also organisations considering to undertake a challenge of implementing Maritime Autonomous Surface Ships in their operations.
1. Introduction
Recently, we can observe a continuously growing trend worldwide in research and development of autonomous ships in academia, industry, and maritime authorities. As per International Maritime Organization [1], autonomous ships are referred to as Maritime Autonomous Surface Ships (MASS). They are expected to operate in one of four degrees of autonomy, dynamically switching between them, as presented in Table 1. The classification was prepared only for a regulatory scoping exercise aimed at identifying legal barriers to MASS implementation, but is also used for other purposes [2,3].Currently, the autonomous ships are not allowed for international shipping due to law regulations [4,5,6,7].

Table 1.
The degree of autonomy and description presented by IMO [1].
The first degree refers to a manned vessel fitted with advanced systems that automate propulsion and guidance of the ship, thus, reducing crews’ mental workload [8]. Controlling the ship from another location introduces the need to implement the Shore Control Centre (SCC), which is responsible for the vessel navigation as well as other aspects of her operations. In case of a remotely controlled ship with seafarers on board—degree 2—the crew is responsible for entering and departing ports as well as for trouble-shooting. The same can arguably be achieved remotely under degree 3. Rødseth claims that, to achieve the economic feasibility, the full autonomy—degree 4—shall be exploited to the greatest extent possible [9,10].
The introduction of MASS into the operation is mainly related to the assessment of the economic benefits of them, simultaneously ensuring the proper level of safety [11,12,13]. One of the key issues for shipowners is the cost-effectiveness of the implemented solution and the scale of its benefits. If the implementation of autonomous ships does not bring sufficient economic benefits, shipping companies most likely will not be interested in investing in such solutions due to the low ROI (Return On Investment). Innovative solutions are usually associated with a greater uncertainty concerning their outcome, thus, implying higher risks and a need for managing the latter [14], especially in the low-margin shipping industry [15].
Up to date, there have been several international Research and Development projects concerning multi-faceted benefits of implementing the autonomous ships into operation [16]. They outlined different scenarios for operating an autonomous ship. For instance, a concept developed in the course of the MUNIN project involved crew participation in entering and departing the port, while the ocean-passage was to be carried out autonomously [16]. Therein, a medium-sized bulk carrier involved in worldwide trade was considered, and the economic analysis performed accounted for these kinds of shipping scenarios. Another example is a ReVolt project, where an autonomous ship prototype was designed by DNV-GL [17]. The motivation for this concept was somewhat different than in MUNIN, since it focuses on coastal waters and the solution developed aimed at the reduction of traffic congestion in urban areas and operating costs of road transport. The overall goal was to move the freight volume from roads to short-sea-shipping (SSS) [17]. Another example of the enterprise leading to the development of autonomous coastal feeder was Yara Birkeland, as the result of cooperation between Norwegian chemical export company Yara and Kongsberg—a maritime technology developer. Yara Birkeland was initially expected to be ready for operation in 2020, with fully autonomous operations in 2022 [18]. As per 2020, the project is on hold due to the COVID-19 pandemic and the changed global outlook [19], thus, reflecting an uncertainty in market conditions directly related to the development of MASS. Another project with a different scope than mentioned above is called Advanced Autonomous Waterborne Applications Initiative (AAWA). It was a concept led by Rolls Royce to prepare the design and specification of the autonomous ships suitable for inland waterways [20].
However, only in the MUNIN project, the anticipated costs are evaluated and discussed. There are three categories of costs related to the operation of autonomous ships, that is, in sea-passage for 216 days. Operating costs consisted of fixed costs including maintenance, insurance, and administration costs (OPEX). Voyage costs were defined as variable costs associated with a particular voyage. These include fuel, cargo handling, and port call cost. Capital costs (CAPEX), in turn, were defined as all the expenses regarding purchase of the ship (construction cost, cost of financing, etc.) [21,22]. The cost of operating the autonomous bulker was compared to a conventional vessel. Finally, a study different from above, since focusing only on economic feasibility of some prospective configurations of autonomous ships in short-sea-shipping, was presented by [23]. Therein, the analysis of economic viability of a concept of a liner shipping network design (LSND) was performed, and the operational costs for mother ship and daughter ships are estimated, and the utilization rate was calculated.
Despite the growing public and research interest in autonomous ships, it appears that relatively little scientific effort has been devoted to the issue of evaluating economic benefits stemming from implementing these solutions, compared to other aspects, for example safety [24,25,26,27,28,29,30,31,32,33,34,35,36,37,38]. The descriptions of economic attractiveness of the projects described earlier in this section do not contain the detailed information about components affecting the economic viability of the anticipated developments. These encompass the following: insurance issues, the costs of operating the ocean-going autonomous containerships, the cost of maintenance and repairs on board the ship during voyage, the increasing cost of protection against cyber piracy, monetization of NOx and CO2 emissions, and the size of an autonomous fleet profitable for the shipowner.
Therefore, the aim of the study is to determine the cost categories related to operation of autonomous ships (CAPEX and OPEX), including the costs of a Shore Control Centre allowing for safe navigation. To this end, a literature survey is performed to establish the state-of-the-art system concerning the use of autonomous shipping in the economic context.
The paper is structured as follows. In Section 2, the methods used in the study are described. Section 3 presents the results, including state-of-the-art qualities in economic issues concerning bulk and container vessels. A discussion is provided in Section 4, while Section 5 summarizes and concludes the paper.
2. Materials and Methods
This section presents the framework adopted to conduct our study and the analysed materials. In order to collect the latter, a three-stage procedure was adopted.
A systematic approach was applied for data gathering. Second, the data sample was filtered (preliminary and finally). The first stage of collecting the database assumed introducing an appropriate search query. Preparing a dataset was initiated by selecting a proper database. The articles were gathered from Google Scholar, which is widely acknowledged as a freely accessible and inclusive database of scholarly literature. Papers were gathered with the use of the following query, where the minus sign denotes the exclusion of a given word from the search.
economy of autonomous vessel, business model, cost, unmanned vessel, -aerial, -underwater, -rov, -drone, -vehicle, -UAV, -seismic, -medicine, -robot, -history, -cyber, -bitcoin, -oceanographic, -combat, -navy, -offshore, -spacecraft, -airspace, -fish
The query was conducted on 1 October 2020, and there was no limit for the year of publication in the search. As a result, an initial database was developed, consisting of 193 scientific documents.
The second stage of preparing the data sample was investigating titles and keywords concerning the papers gathered as the initial database. After browsing titles and abstracts, 174 documents were rejected since they did not refer to MASS, thus, leaving 19 documents for the final stage. A 90% rejection ratio is not atypical for reviews based on manual browsing [8].
In the third stage, the 19 papers were reviewed in depth. In this procedure, 15 papers presenting costs and economic benefits of autonomous shipping were selected, while four were dismissed, due to no significant reference to the analysed subject. Moreover, during this final stage of filtering, attention was also given to the lists of references of the finally filtered articles, since these could provide additional papers, which were not found at earlier stages. After browsing the titles, some of the articles were considered as relevant to the analysed subject. As a result, four additional articles were included in the final data sample, yielding 19 documents for the analysis. The entire process of data gathering is depicted in detail in Figure 1. The list of documents gathered during second filtering is presented in the Appendix A.
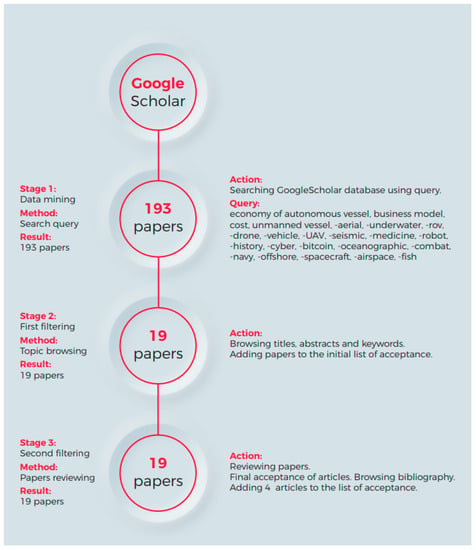
Figure 1.
The process of determining the final data sample.
The breakdown of the analysed documents according to publication year and type of publication is presented in Table 2.
Table 2.
Type and number of papers included in the final data sample published in years 2014–2020.
3. Results
3.1. Literature Overview
The analysed literature shows that numerous documents raise the issue of costs and the effects of implementing autonomous shipping in the economic aspect. It is considered relevant for the domain by many authors. However, only 6 out 19 analysed publications tackle this issue in a structured and detailed manner. The in-depth description of costs in autonomous shipping is presented in Table 3. The remaining 13 articles, which are not listed in Table 3, contain only a brief and superficial information about the cost of autonomous shipping without indicating cost components.
Table 3.
Type and number of papers included in the final data sample published from 2014 to 2020.
However, only two papers deal directly with the costs’ estimation for autonomous ship operations, as presented below. One document presents literature analysis on selected aspects of autonomous shipping in terms of design, safety, navigation control, and short description of economic issues [39]. The rest of the papers focus on the Liner Shipping Network Design concept [23,40] and vessel platooning concept [41].
In the work by Lutz Kretschmann, Burmeister, and Jahn 2017, the operating, voyage, and capital costs were estimated for conventional bulker and her autonomous counterpart of the same capacity. The authors assume that maintenance of the ship will be conducted by crews in ports. Reduction of costs regarding crew wages and other related costs is compensated by the cost of running the Shore Control Centre, which is estimated to monitor 90 vessels at once. In their study, authors considered three scenarios: (1) reduced crew, (2) reduced crew and increased fuel efficiency, and (3) reduced crew, increased fuel efficiency, and the use of high-grade fuel. The cost of emergency arrival of the crew on board is not taken into account.
The case of an autonomous container ship for short sea trades with the capacity of 600 TEU was also considered. The total distance per round voyage was 1937 nautical miles [42]. The authors introduce communication costs that are estimated to increase ten-fold in comparison to a conventional container ship (see Table 4).
Table 4.
Main dimensions of ReVolt, Yara Birkeland, and autonomous short sea container ship, based on [17,21,42].
The analysed literature focuses on presenting costs of construction and operation of autonomous ships as a selected case study of a container ship or bulk carrier. These are presented in Section 3.2. Estimating costs at the level of general assumptions is not performed in the analysed documents.
3.2. Basic Costs of Operating Autonomous Ships
The following section provides a detailed description of the economic performance of autonomous ships in two selected case studies. The analysis is focused on the cost of operating a bulk carrier and a containership.
3.2.1. Bulk Carrier
The basic motivation for the MUNIN project was to contribute to the triple bottom line—economic, social, and environmental issues and evaluate the project performance with the use of those three factors. The major challenges of the maritime industry according to Burmeister are: keeping expenses at the possibly low level, reducing greenhouse gas emissions caused by shipping, and removing crew from trivial ship operations [34].
The operation of the autonomous bulker with regard to MUNIN assumes fitting the ship with an Autonomous Navigation System, while the ship is controlled by the Advanced Sensor Module and supervision over the course of the ship’s route is provided by the Shore Control Centre [21]. In a situation where Autonomous Ship Control is unable to cope with the difficulties encountered, the ship is switched to a remote control mode and the operator in the Shore Control Centre takes control over the ship [43]. First, the MUNIN concept assumed participation of the crew when departing and entering the port. However, the cost-benefit analysis alone indicated that the crew can feasibly be replaced by the use of a remote control for operations in port. Clearly, the question on safety of such a solution remains open [44]. The lack of crew on board will affect the cost structure. Consequently, the need for ship facilities intended for seafarers will not be necessary.
Moreover, the cost for equipment, annual expenses on rent, and operational costs of the autonomous bulker are given as rough estimates. While the investment cost of developing Shore Control Centre ranges from 1 to 2.1 mUSD, and the annual operating cost yields 0.87 mUSD [21,42].
The division of costs into operating, voyage, and capital of autonomous ship including reduction and increases with regard to implementing autonomous bulk carrier are presented in Table 5 and Table 6, as per [21]. Table 5 shows the estimates of costs of operating the unmanned bulker, as per [21]. These are compared to a reference vessel—conventional bulker (length—230 m, breadth—32 m, design draught—14.5 m, service speed—15.5 kn, main engine—10.230 kW).
Table 5.
Costs of running an autonomous bulker based on [21].
Table 6.
Costs of running autonomous bulker—based on [21].
Therein, the largest part of total costs (53%) relates to voyage costs (mainly fuel consumption), followed by the capital costs (26%), understood as autonomous technology and redundancies, while the operating costs accounts for 20% of the total cost. The authors claim the voyage costs are governed by two major factors: fuel consumption (up to 77%) and port-call (20%). The former can be reduced in case of the autonomous ship by approximately 6% owing to the reduced light ship weight, air resistance, and absence of the hotel system [45]. The required propulsion power could be reduced by approximately 1% if deckhouses were removed. Additionally, changes in light ship weight, caused mainly by the absence of extensive accommodation facilities, contribute to the reduced fuel consumption. The voyage costs also include boarding of a berthing party, which is estimated to be 20% higher than in case of a conventional vessel.
The lack of crew on board the autonomous ship, on one hand, results in the reduction of crew wages and crew-related costs (e.g., safety equipment), but, on another, it introduces a necessity of development and operation of the Shore Control Centre, which is estimated as 33,000 USD per vessel per year. All the repairs are expected to be carried out in ports by the specialized crew, which generates additional costs.
However, in Table 6, a qualitative assessment of relative changes in the given group of costs is provided for an autonomous ship, indicating which type of costs are expected to increase and what costs are expected to decrease, compared to a conventional bulk carrier.
3.2.2. Container Vessel
Currently, investment projects dedicated to autonomous container short-sea shipping are subjects of growing interest, mainly due to the continuously growing volume of container transport [46]. One of the projects related to autonomous container ships is the ReVolt, where a concept vessel designed by DNV GL along with its model have been developed [17]. Additionally, individual case studies are present in the literature [42].
The reduction of crew, thus, the living quarters, is expected to lower the capital costs of a small container ship feeder by 5% [47], which will also enable the ship to carry more containers on-board, as the ship is expected to gain up to 20% container slots [17]. Moreover, the removal of the superstructure may lead to lower port fees and, hence, decreased voyage costs [42]. Moreover, there are various modes of ship operation affecting the anticipated costs and benefits. One reads the ship will operate with the speed of 6 knots and a range of 100 nautical miles, while another claims the speed of 16 knots and an operational range of 2000 nm. In addition, the carrying capacity ranges from 100 TEU to 600 TEU. It is claimed that the autonomous feeder vessel compared to the conventional one generates savings USD 34 million during 30 years of operation. Thus, it is implied that the economic viability ceases to exist after that time of service [17]. However, the studies of 600 TEU autonomous container feeder reveal that this period is shorter by 10 years [42]. The exact figures could only be determined once actual economic data is available, especially when taking into account the costs induced and the technological development.
Among the operating costs, the one burdened with significant uncertainty are related to the insurance, as the risk level of autonomous ships remain largely unknown to date. This, in turn, may hamper the development of autonomous ships [5,48]. The level of insurance fees may be dictated by the evidence regarding reduced risk [17].
The introduction of autonomous ships in navigation implies increased use of sensors. DNV-GL claims that the average number of sensors will be between 15,000 to 20,000 on-board the ship to monitor the safety-critical and other relevant systems [17]. The average cost of the sensor is estimated as USD 0.38 (compared to 2004, the cost was estimated at USD 1.30 level) [49]. In addition, the redundancies on the ship will be a necessity [50]. To ensure safe and efficient operations, it is postulated to at least duplicate safety-critical systems including communication and navigation, as well as power supply [9,51,52]. This move will lead to the higher costs of investments and operations [53].
Recently, it can be observed that the attractiveness of seafaring is declining and crewing can become more cost-consuming [54]. In case of autonomous ships, the Shore Control Centre is expected to require the personnel of two certified officers per shift [42]. The extent of increase in communication costs remains unclear. However, it varies from a 10% increase—[47]—up to a tenfold raise in comparison to conventional vessels (26k USD/year/ship) [42]. Clearly, this is another significant source of uncertainty.
The summary of factors discussed for the autonomous bulk carriers (Section 3.2.1.) and container vessels (Section 3.2.2.) is given in Figure 2.
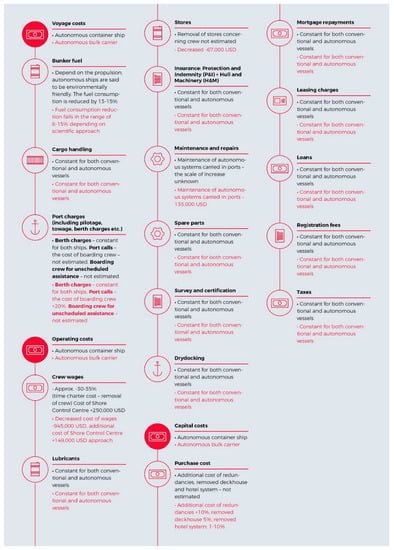
Figure 2.
Increases and decreases in autonomous shipping [21,42].
However, the estimates may change dramatically, depending on the operation mode the given autonomous ship is involved in, especially if a liner shipping network design concept is applied as discussed in Section 3.3.
3.3. Costs Induced Due to Various Operation Modes
One of the analysed operational modes suitable for autonomous ships is called a liner shipping network design (LSND-A) in short sea shipping [23]. The objective of such a mode is to minimize the total cost of operating the fleet of ships, leaving operational decisions out of the scope. The liner shipping network design is aimed at designing a set of weekly services within a specific time constraint based on the demands—time limit, demand, and destination [55].
In this mode, a mother vessel and a set of autonomous daughter vessels are anticipated. In the case study presented by Akbar et al. 2020, a mother ship serves the hub ports whereas daughter ships serve small ports along Norway. The mother route starts in the continental hub port, Rotterdam, and serves the Norwegian main ports. The daughter routes are routes between Norwegian transhipment port and serve other Norwegian main and small ports. Akbar [23] prepared an analysis on the type and number of autonomous daughter ships necessary to meet the transport demand. The fleet of daughter ships is heterogeneous in terms of capacity, which allows adapting the autonomous ship to transport needs. Introduction of autonomous daughter ships reduce operational cost by 11%. The majority of savings is generated by reduced time charter cost (as a result of the absence of crew).
Nevertheless, the construction cost of a fully autonomous ship is estimated to increase by approx. 5%. As a result, the reduction in operational costs is between 9 and 13% [40].
Nevertheless, Akbar et al. (2020) considered the case of introducing the autonomous mother vessel into operation in LSND-A. The reduction of cost of operating the fleet is 20% in comparison to fully conventional model. The fuel cost is decreased by 10% [23]. In the scenario with the use of a conventional mother vessel and autonomous daughter vessels calling 22 ports, the authors assume that the introduction of autonomous daughter ships is expected to reduce total operational costs by approximately 11%. The majority of the savings (94%) is a result of reduced time charter costs (the crew cost is removed) and fuel costs (6%). The cost of cargo handling in the port is increased by 22% in case of autonomous ships in comparison to conventional vessels.
The fleet of autonomous daughter ships is larger, but the ships have a smaller capacity in comparison to the conventional fleet, which reduces overall costs [23].
Similarly to LSND, the concept of the vessel train denotes a manned master-ship and automatically controlled the following vessels [56,57]. In a semi-autonomous vessel platooning concept, the main cost saving is reduction in crew cost. The increased number of the autonomous following vessels (FV) influences reduction in the cost associated with individual FV. The economic feasibility is due to the length of the vessel train. The cost savings of operating autonomous FVs should be equal to or larger than vessel train dues. The concept is relevant for routes that have constant cargo flow and high demand for transport services [58].
3.4. Sensitivity Analysis of a Life-Time Cost Assessment
One of the most popular methods to assess the economic performance of the project is net present value. The indicator presents a difference of future cash flows (both in-flow and out-flow) with a given discount rate and the initial capital investment [59]. Kretschmann [21] also presents the required freight rate (RFR) as an indicator of economic effectiveness. RFR is the aggregated cost of owning and operating a vessel divided by total cargo tonnage over a specific period of time [60]. RFR is a freight rate, which produces a zero net present value over the assumed life of the ship [61]. The lower the RFR for the autonomous ship is, the more cost-efficient the ship is in comparison to the conventional one.
Kretschmann, Burmeister, and Jahn (2017) analyses three different scenarios and compares the indicators with the conventional vessel over 25 years. The first scenario (Scenario A) concerns the aspect of a reduced crew [39]. The expected present value (EPV) is the total cost of owning and operating the ship. The expected present value of the cost of owning and operating the autonomous bulker is 0.5 mUSD lower in comparison to a conventional reference vessel. The required freight rate for the autonomous bulk carrier is 0.4% lower than the RFR of the conventional bulker, which indicates that the autonomous bulk carrier is favourable in economic terms.
The second scenario (Scenario B), also described as the base scenario, takes into account the aspect of reduced fuel consumption and reduced crew. In this scenario, EPV (Expected Net Present Value) for the autonomous bulker is 4.3 mUSD lower in comparison to a conventional one. The RFR of an autonomous ship (producing 0 NPV—Net Present Value) is 3.4% lower than the RFR of a reference ship.
The third scenario (Scenario C) is based on three elements: reduced crew, reduced fuel consumption, and the use of high-grade fuel. The EPV for autonomous ship is estimated as 19.2 mUSD higher than the EPV of the reference vessel, mostly as a result of higher fuel consumption costs. Consequently, the RFR of the unmanned vessel is roughly 15% higher than for a conventional vessel [21].
The results of sensitivity analysis carried out for the three analysed scenarios (Table 7) demonstrates that autonomous ships can be expected to become cost-effective, especially when improvements in ship’s fuel efficiency can be achieved, in addition to reduction of crew costs, as presented in Scenario 3 above. As depicted in Figure 3, the benefits in such a case are higher for long voyages and in a high fuel price scenario. Scenario B depicted in Figure 3 considers the reduced fuel consumption and the absence of crew during a sea passage. On the other hand, if the use of HFO (Heavy Fuel Oil) as the main fuel for an autonomous ship would not be possible. Then it would be extremely challenging for the vessel to be cost-competitive, unless she would be operated exclusively in SECA zones (Sulphur Emission Control Area).
Table 7.
The scenarios prepared for the cost-benefit analyses [21].
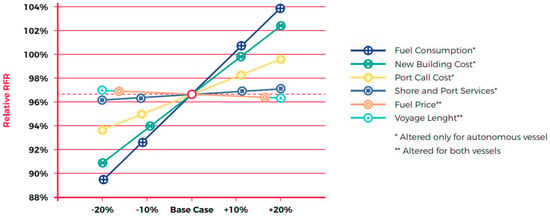
Figure 3.
Impact of input variables on relative RFR [21].
When it comes to various modes of autonomous ship operation, the liner shipping network design concept demonstrated that its introduction is economically favourable, [23,40]. The authors also presented the sensitivity analysis for the case of a conventional mother vessel and autonomous daughter vessels. As a result, [23] identified that exceeding 119% of the additional construction cost of the autonomous daughter ship makes the operation of the autonomous ship economically infeasible. The sensitivity analysis performed indicates that introducing autonomous daughter vessels is profitable. The authors focused on the construction cost of an autonomous ship in the case of 22 and 42 ports under normal demand. The introduced boundary of 119% is definitely higher than existing cost estimates [23].
Compared to a conventional container feeder, her autonomous counterpart is expected to face an internal rate of return at the level of 13.5% (the same as per conventional vessel), as presented by [42]. This is despite the newbuilding price for the autonomous ship being 32% higher than the conventional one (16.5 mUSD excluding the cost of SCC).
4. Discussion
The conducted literature analysis was based on the use of one database—Google Scholar. The query used in the study was formulated generally, with the simultaneous attempt to exclude issues related to other scientific disciplines. However, there were many articles in the dataset concerning both medical and social sciences, which is due to the polysemy phenomenon. Moreover, the limitation of the study was the utilization of different words to describe the same issues by authors of the articles than those used in the query. Due to the above-mentioned challenges, some of the relevant articles could have been omitted.
The herein performed literature review of the economic aspects of autonomous ships presents that much effort has been put into defining costs associated with the construction and operations of prospective autonomous ships, as well as developing relevant economic models for the aspects of the operation of the single ships as well as fleet of autonomous ships. However, there remain uncertainties regarding the costs, resulting mainly from the immaturity of the technology and various concepts of prospective ship and fleet operations. However, only after the introduction of autonomous ships into the shipping industry CAPEX and OPEX parameters can be determined.
The business models play a significant role in evaluating innovative transport projects. It is generally acknowledged that autonomous ships can bring about direct economic advantages. However, apart from direct gains, there are also non-trivial ones. It shall be noted that the propulsion of the ship in most cases is said to be environmentally-friendly. However, the benefits from the reduced emissions of NOx and CO2 are not monetized within the existing models, while these issues gain ever-increasing attention [62,63,64]. Similarly, the costs related to safeguarding the cyber security [65,66] remains an open question, as well as contingency operations, or any other safety critical area of conventional shipping that presently requires direct intervention of humans in case of failure. All these directly affect the costs of insurance of prospective autonomous ships, about which the authors of the reviewed documents remained silent.
Another aspect is the economy of the scale. Meanwhile, the size of the fleet from the shipowner’s point of view as the most favourable in cost-efficiency terms was not estimated for cases other than vessel platooning. Neither was the issue of how insurance rates would be affected by potentially different risk levels of autonomous ship operations [50]. Meanwhile, these account for as much as 1% of total operational costs of traditional vessels [67].
Taking into account the data presented in the previously mentioned documents, we can assume that preparing a detailed economic model concerning the cost breakdown related to the operation of the autonomous vessel fleet would allow for a determination of the directions of further development of autonomous shipping aimed at reaping from the implemented solutions. Preparing a general business model may become challenging regarding the differences in characteristics and market conditions of the areas where autonomous shipping could be implemented. It would be essential to focus on case studies concerning economic feasibility for introducing the specific autonomous shipping line or shipping connection [68].
The costs of potential accidents that the ship may be involved in is not accounted for. However, it is claimed that the prospective autonomous ships may be less likely accident-prone than the conventional ones [50].
5. Conclusions
The aim of the paper was to introduce the categories of costs that are essential when preparing economic analysis regarding autonomous ships based on the existing literature. To this end, the literature survey has been conducted, based on the Google Scholar database, covering 19 relevant documents published between 2014–2020.
As a result, the cost breakdown (operating, voyage, and capital) was prepared and the anticipated changes in the cost structure for both autonomous and conventional ships (containership and bulker) were presented. Additionally, the economic effect of various modes of ship operations, including vessel platooning, is discussed. Several gaps in knowledge became evident. The remaining open issues are the following: the cost of insurance, the costs of cyber security, or contingency operations. These are omitted in the literature most likely due to an absence of reliable data. Nevertheless, they should be considered in the analysis or any model of autonomous ship costs, since these may significantly influence the economic feasibility of such an endeavour.
The autonomous merchant ships are expected to serve one purpose above others—to haul cargoes between ports, bringing revenue to their owners and operators. Without an economic feasibility of the technology, its concept remains questionable from its very roots. To this end, the economical aspect of the technology shall be investigated, accounting for the existing uncertainties, in order to formulate clear suggestions as to the further direction of technological and operational advancements.
However, to perform such an analysis in a convincing and reliable manner, real-life data or alike are prerequisites along with an accurate description of the analysed system and its operational pattern as well as proper uncertainty treatment, communicating those to the end users. Even then, this will only be applicable to a particular case scenario, and generic assessment might prove extremely difficult to formulate due to the enormous complexity of the system itself.
Funding
WN/PZ/2021/02.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Table A1.
List of 19 papers after second filtering.
Table A1.
List of 19 papers after second filtering.
| Author(s) | Reference | Year |
|---|---|---|
| Burmeister, Wilko, Rødseth and Porathe | Burmeister, Hans-Christoph, Wilko C Bruhn, Ørnulf Jan Rødseth, and Thomas Porathe. 2014. “Can Unmanned Ships Improve Navigational Safety?” Transport Research Arena, 1–10. http://publications.lib.chalmers.se/records/fulltext/198207/local_198207.pdf. | 2014 |
| Banda and Kannos | Banda, O.A. Valdez, and S. Kannos. 2017. “Hazard Analysis Process for Autonomous Vessels.” 69. | 2017 |
| Kretschmann, Burmeister, and Jahn | Kretschmann, Lutz, Hans Christoph Burmeister, and Carlos Jahn. 2017. “Analyzing the Economic Benefit of Unmanned Autonomous Ships: An Exploratory Cost-Comparison between an Autonomous and a Conventional Bulk Carrier.” Research in Transportation Business and Management 25 (April): 76–86. https://doi.org/10.1016/j.rtbm.2017.06.002. | 2017 |
| Rødseth | Rødseth, Ørnulf Jan. 2017. “From Concept to Reality: Unmanned Merchant Ship Research in Norway.” 2017 IEEE OES International Symposium on Underwater Technology, UT 2017. https://doi.org/10.1109/UT.2017.7890328. | 2017 |
| Rodseth and Nordahl | Rodseth, Ornulf Jan, and Håvard Nordahl. 2017. “Definitions for Autonomous Merchant Ships”, Norwegian Forum for Unmanned Ships, Version 1.0. Norwegian Forum for Unmanned Ships, 21. http://nfas.autonomous-ship.org/resources/autonom-defs.pdf. | 2017 |
| Allal et al. | Allal, Abdelmoula Ait, Khalifa Mansouri, Mohamed Youssfi, and Mohammed Qbadou. 2018. “Toward a Review of Innovative Solutions in the Ship Design and Performance Management for Energy-Saving and Environmental Protection.” 19th IEEE Mediterranean Eletrotechnical Conference, MELECON 2018—Proceedings, 115–18. https://doi.org/10.1109/MELCON.2018.8379078. | 2018 |
| Imset, Haavardtun, and Tannum | Imset, Marius, Per Haavardtun, and Marius Tannum. 2018. “Exploring the Use of Stakeholder Analysis Methodology in the Establishment of a Living Lab.” Technology Innovation Management Review 8 (12): 26–39. https://doi.org/10.22215/timreview/1203. | 2018 |
| Kooij, Colling, and Benson | Kooij, C, A P Colling, and C L Benson. 2018. “When Will Autonomous Ships Arrive? A Technological Forecasting Perspective.” Proceedings of the International Naval Engineering Conference and Exhibition (INEC) 14. https://doi.org/10.24868/issn.2515-818x.2018.016. | 2018 |
| Santos and Guedes Soares | Santos, T. A., and C. Guedes Soares. 2018. “Economic Feasibility of an Autonomous Container Ship.” Maritime Transportation and Harvesting of Sea Resources 2: 861–70. | 2018 |
| Vervoort, Van Casteren, and Decorte | Vervoort, Marc, Ruben Van Casteren, and Colin Decorte. 2018. “Embedding Teaching-Student-Research Nexus in 2018: A Case Study in Big Data Analysis in Nautical Services.” EDULEARN18 Proceedings 1 (November): 4204–9. https://doi.org/10.21125/edulearn.2018.1062. | 2018 |
| Allianz Global Corporate | Allianz Global Corporate and Specialty. 2019. “Safety and Shipping Review 2019,” no. December 2019: 36. http://www.agcs.allianz.com/assets/PDFs/Reports/Shipping-Review-2015.pdf. | 2019 |
| Colling and Hekkenberg | Colling, Alina, and Robert Hekkenberg. 2019. Autonomous Ships—Changing Perceptions and Expectations. A Multi-Scenario Simulation Transport Model to Assess the Economics of Semi-Autonomous Platooning Concepts, 18th Conference on Computer Applications and Information Technology in the Maritime Industries. | 2019 |
| Gu et al. | Gu, Yewen, Julio Cesar Goez, Mario Guajardo, and Stein W. Wallace. 2020. “Autonomous Vessels: State of the Art and Potential Opportunities in Logistics.” International Transactions in Operational Research 00: 1–34. https://doi.org/10.1111/itor.12785. | 2019 |
| Houston Inc. | Houston Inc. 2019. “Devops in Maritime Industry Digitalization.” https://houston-inc.com/work/devops-in-maritime-industry-digitalization. | 2019 |
| James et al. | James, K. J., Vikas V. Shenoy, M. Bhasi, and C. G. Nandakumar. 2019. “Automated ICT Systems in Inland Waterways by Developing a Multi-Flow River Information Services System.” International Journal of Advanced Research in Engineering and Technology 10 (2): 389–402. https://doi.org/10.34218/IJARET.10.2.2019.038. | 2019 |
| Valdez Banda et al. | Valdez Banda, Osiris A., S. Kannos, Floris Goerlandt, Pieter H.A.J.M. van Gelder, Martin Bergström, and Pentti Kujala. 2019. “A Systemic Hazard Analysis and Management Process for the Concept Design Phase of an Autonomous Vessel.” Reliability Engineering and System Safety 191 (December 2017): 106584. https://doi.org/10.1016/j.ress.2019.106584. | 2019 |
| Vojković and Milenković 2019 | Vojković, Goran, and Melita Milenković. 2019. “Autonomous Ships and Legal Authorities of the Ship Master.” Case Studies on Transport Policy, no. September 2018: 0–1. https://doi.org/10.1016/j.cstp.2019.12.001. | 2019 |
| Akbar et al. | Akbar, Abeera, Anna K A Aasen, Mohamed Msakni, Kjetil Fagerholt, Elizabeth Lindstad, and Frank Meisel. 2020. “An Economic Analysis of Introducing Autonomous Ships in a Short-Sea Liner Shipping Network” 00: 1–25. https://doi.org/10.1111/itor.12788. | 2020 |
| Msakni et al. | Msakni, Mohamed Kais, Abeera Akbar, Anna K. A. Aasen, Kjetil Fagerholt, Frank Meisel, and Elizabeth Lindstad. 2020. “Can Autonomous Ships Help Short-Sea Shipping Become More Cost-Efficient?” In, 389–95. https://doi.org/10.1007/978-3-030-48439-2_47. | 2020 |
References
- (International Maritime Organisation MSC (MSC 99/WP.9). Regulatory Scoping Exercise for the Use of Maritime Autonomous Surface Ships (MASS); International Maritime Organisation: London, UK, 2018; pp. 1–5. [Google Scholar]
- Fan, C.; Wróbel, K.; Montewka, J.; Gil, M.; Wan, C.; Zhang, D. A Framework to Identify Factors Influencing Navigational Risk for Maritime Autonomous Surface Ships. Ocean Eng. 2020. [Google Scholar] [CrossRef]
- Chae, C.J.; Kim, M.; Kim, H. A Study on Identification of Development Status of MASS Technologies and Directions of Improvement. Appl. Sci. 2020, 10, 4564. [Google Scholar] [CrossRef]
- Li, S.; Fung, K.S. Maritime Autonomous Surface Ships (MASS): Implementation and Legal Issues. Marit. Bus. Rev. 2019, 4, 330–339. [Google Scholar] [CrossRef]
- Vojković, G.; Milenković, M. Autonomous Ships and Legal Authorities of the Ship Master. Case Stud. Transp. Policy 2020, 8, 333–340. [Google Scholar] [CrossRef]
- Kooij, C.; Colling, A.P.; Benson, C.L. When Will Autonomous Ships Arrive? A Technological Forecasting Perspective. In Proceedings of the International Naval Engineering Conference and Exhibition (INEC), Glasgow, UK, 2–4 October 2018. [Google Scholar] [CrossRef]
- Rodseth, J.O.; Nordahl, H. Definitions for Autonomous Merchant Ships, Norwegian Forum for Unmanned Ships, Version 1.0. Nor. Forum Unmanned Ships 2017, 21. Available online: http://nfas.autonomous-ship.org/resources/autonom-defs.pdf (accessed on 22 November 2020).
- Gil, M.; Wróbel, K.; Montewka, J.; Goerlandt, F. A Bibliometric Analysis and Systematic Review of Shipboard Decision Sup-port Systems for Accident Prevention. Saf. Sci. 2020, 128, 104717. [Google Scholar] [CrossRef]
- Rødseth, Ø.J. From Concept to Reality: Unmanned Merchant Ship Research in Norway. In Proceedings of the 2017 IEEE OES International Symposium on Underwater Technology, Busan, Korea, 21–24 February 2017. [Google Scholar] [CrossRef]
- Munim, H.Z.; Dushenko, M.; Jimenez, V.J.; Shakil, M.H.; Imset, M. Big Data and Artificial Intelligence in the Maritime In-dustry: A Bibliometric Review and Future Research Directions. Marit. Policy Manag. 2020. [Google Scholar] [CrossRef]
- Thieme, C.A.; Utne, I.B.; Haugen, S. Assessing Ship Risk Model Applicability to Marine Autonomous Surface Ships. Ocean Eng. 2018, 165, 140–154. [Google Scholar] [CrossRef]
- Chaal, M.; Banda, O.A.V.; Glomsrud, J.A.; Basnet, S.; Hirdaris, S.; Kujala, P. A Framework to Model the STPA Hierarchical Control Structure of an Autonomous Ship. Saf. Sci. 2020, 132, 104939. [Google Scholar] [CrossRef]
- Imset, M.; Haavardtun, P.; Tannum, M. Exploring the Use of Stakeholder Analysis Methodology in the Establishment of a Living Lab. Technol. Innov. Manag. Rev. 2018, 8, 26–39. [Google Scholar] [CrossRef]
- Etges, A.P.; Souza, J.S.; Kliemann Neto, F.J. Risk Management for Companies Focused on Innovation Processes. Production 2017. [Google Scholar] [CrossRef]
- Haider, J.; Ou, Z.; Pettit, S. Predicting Corporate Failure for Listed Shipping Companies. Marit. Econ. Logist. 2019, 21, 415–438. [Google Scholar] [CrossRef]
- Porathe, T. A Navigating Navigator Onboard or a Monitoring Operator Ashore? Towards Safe, Effective, and Sustainable Maritime Transportation: Findings from Five Recent EU Projects. Transp. Res. Procedia 2016, 14, 233–242. [Google Scholar] [CrossRef]
- DNV GL. Position Paper-Remote-Controlled and Autonomous Ships; DNV GL: Berrum, Norway, 2018. [Google Scholar]
- Autonomous Ship Project, Key Facts about YARA Birkeland-Kongsberg Maritime. 2017. Available online: https://www.kongsberg.com/maritime/support/themes/autonomous-ship-project-key-facts-about-yara-birkeland/ (accessed on 15 May 2020).
- Yara Birkeland Press Kit | Yara International. 2020. Available online: https://www.yara.com/news-and-media/press-kits/yara-birkeland-press-kit/ (accessed on 22 November 2020).
- Rolls-Royce. Autonomous Ships: The next Step; AAWA Position Pap. Roll. Royce Plc.: London, UK, 2016; Volume 7. [Google Scholar]
- Kretschmann, L.; Burmeister, H.C.; Jahn, C. Analyzing the Economic Benefit of Unmanned Autonomous Ships: An Explora-tory Cost-Comparison between an Autonomous and a Conventional Bulk Carrier. Res. Transp. Bus. Manag. 2017. [Google Scholar] [CrossRef]
- Bhalodi, A. Transportation Management Research Paper. 2019.
- Akbar, A.; Aasen, A.K.; Msakni, M.; Fagerholt, K.; Lindstad, E.; Meisel, F. An Economic Analysis of Introducing Autonomous Ships in a Short-Sea Liner Shipping Network. Int. Trans. Oper. Res. 2020, 28, 1740–1764. [Google Scholar] [CrossRef]
- Goerlandt, F. Maritime Autonomous Surface Ships from a Risk Governance Perspective: Interpretation and Implications. Saf. Sci. 2020, 128, 104758. [Google Scholar] [CrossRef]
- Li, X.K.; Cullinane, K. An Economic Approach to Maritime Risk Management and Safety Regulation. Marit. Econ. Logist. 2003, 5, 268–284. [Google Scholar] [CrossRef]
- Gou, X.; Lam, J.S.L. Risk Analysis of Marine Cargoes and Major Port Disruptions. Marit. Econ. Logist. 2019, 21, 497–523. [Google Scholar] [CrossRef]
- Kiiski, T.; Solakivi, T.; Töyli, J.; Ojala, L. Long-Term Dynamics of Shipping and Icebreaker Capacity along the Northern Sea Route. Marit. Econ. Logist. 2018, 20, 375–399. [Google Scholar] [CrossRef]
- Acanfora, M.; Krata, P.; Montewka, J.; Kujala, P. Towards a Method for Detecting Large Roll Motions Suitable for Oceango-ing Ships. Appl. Ocean Res. 2018, 79, 49–61. [Google Scholar] [CrossRef]
- Acanfora, M.; Montewka, J.; Hinz, T.; Matusiak, J. Towards Realistic Estimation of Ship Excessive Motions in Heavy Weath-er. A Case Study of a Containership in the Pacific Ocean. Ocean Eng. 2017, 138, 140–150. [Google Scholar] [CrossRef]
- Wróbel, K.; Gil, M.; Chae, C.J. On the Influence of Human Factors on Safety of Remotely-Controlled Merchant Vessels. Appl. Sci. 2021, 11, 1145. [Google Scholar] [CrossRef]
- Lyu, H.; Yin, Y. Fast Path Planning for Autonomous Ships in Restricted Waters. Appl. Sci. 2018, 8, 2592. [Google Scholar] [CrossRef]
- Felski, A.; Zwolak, K. The Ocean-Going Autonomous Ship-Challenges and Threats. J. Mar. Sci. Eng. 2020, 8, 41. [Google Scholar] [CrossRef]
- Zhang, M.; Montewka, J.; Manderbacka, T.; Kujala, P.; Hirdaris, S. A Big Data Analytics Method for Evaluation of Ship-Ship Collision Risk Reflecting Real Operational Conditions. Reliab. Eng. Syst. Saf. 2021, 213, 107674. [Google Scholar] [CrossRef]
- Burmeister, H.C.; Bruhn, W.C.; jan Rødseth, Ø.; Porathe, T. Can Unmanned Ships Improve Navigational Safety? Transp. Res. Arena. 2014. Available online: http://publications.lib.chalmers.se/records/fulltext/198207/local_198207.pdf (accessed on 24 November 2020).
- Banda, O.A.V.; Kannos, S. Hazard Analysis Process for Autonomous Vessels. 2017. Available online: https://www.aboamare.fi/_media_25402_/R&D%20kuvat/%C3%83%E2%80%9ElyVESI/Tulokset%20201805/Hazard-Analysis-Process-for-Autonomous-Vessels.pdf (accessed on 24 November 2020).
- Allianz Global Corporate and Specialty. Safety and Shipping Review 2019. 2019. Available online: http://www.agcs.allianz.com/assets/PDFs/Reports/Shipping-Review-2015.pdf (accessed on 24 November 2020).
- Banda, O.A.; Kannos, S.; Goerlandt, F.; van Gelder, P.H.; Bergström, M.; Kujala, P. A Systemic Hazard Analysis and Man-agement Process for the Concept Design Phase of an Autonomous Vessel. Reliab. Eng. Syst. Saf. 2019, 191, 106584. [Google Scholar] [CrossRef]
- James, K.J.; Shenoy, V.V.; Bhasi, M.; Nandakumar, C.G. Automated ICT Systems in Inland Waterways by Developing a Multiflow River Information Services System. Int. J. Adv. Res. Eng. Technol. 2019, 10, 389–402. [Google Scholar] [CrossRef]
- Gu, Y.; Goez, J.C.; Guajardo, M.; Wallace, S.W. Autonomous Vessels: State of the Art and Potential Opportunities in Logistics. Int. Trans. Oper. Res. 2020. [Google Scholar] [CrossRef]
- Msakni, K.M.; Akbar, A.; Aasen, A.K.A.; Fagerholt, K.; Meisel, F.; Lindstad, E. Can Autonomous Ships Help Short-Sea Ship-ping Become More Cost-Efficient? Oper. Res. Proc. 2020. [Google Scholar] [CrossRef]
- Colling, A.P.; Hekkenberg, R.G. A Multi-Scenario Simulation Transport Model to Assess the Economics of Semi-Autonomous Platooning Concepts. In Proceedings of the 18th Conference on Computer Applications and Information Technology in the Maritime Industries (COMPIT 2019), Tullamore, Ireland, 25–27 March 2019; pp. 132–145. [Google Scholar]
- Santos, T.A.; Guedes Soares, C. Economic Feasibility of an Autonomous Container Ship. Marit. Transp. Harvest. Sea Resour. 2018, 2, 861–870. [Google Scholar]
- Rodseth, O.J.; Kvamstad, B.; Porathe, T.; Burmeister, H.C. Communication Architecture for an Unmanned Merchant Ship. In Proceedings of the OCEANS 2013 MTS/IEEE Bergen: The Challenges of the Northern Dimension, Bergen, Norway, 10–14 June 2013. [Google Scholar] [CrossRef]
- Kretschmann, L.; Rødseth, Ø.J.; Fuller, B.S.; Noble, H.; Horahan, J.; McDowell, H. D9.3: Quantitative Assessment. Marit. Unmanned Navig. Intell. Netw. 2015, 12–20. [Google Scholar]
- ABS. Ship Energy Efficiency Measures -Status and Guidance. 2012. Available online: https://www.eagle.org/eagleExternalPortalWEB/ShowProperty/BEA/Repository/References/Capability/Brochures/ShipEnergyEfficiency (accessed on 15 May 2020).
- Priftis, A.; Boulougouris, E.; Turan, O.; Papanikolaou, A. Parametric Design and Multi-Objective Optimisation of Container-ships. Ocean Eng. 2018, 156, 347–357. [Google Scholar] [CrossRef]
- A Commercial Reality Check for Autonomous Shipping in 2018 | Seatrade Maritime. 2018. Available online: https://www.seatrade-maritime.com/asia/commercial-reality-check-autonomous-shipping-2018 (accessed on 22 November 2020).
- Autonomous Ships-Redefining the Industry? General Insurance-Marine. 2016. Available online: https://www.asiainsurancereview.com/Magazine/ReadMagazineArticle?aid=38465 (accessed on 24 November 2020).
- Levander, O. Ship Intelligence—A New Era. Smart Ship Technol. 2016, 25–32. [Google Scholar]
- Wróbel, K.; Montewka, J.; Kujala, P. Towards the Assessment of Potential Impact of Unmanned Vessels on Maritime Trans-portation Safety. Reliab. Eng. Syst. Saf. 2017, 165, 155–169. [Google Scholar] [CrossRef]
- Hogg, T.; Ghosh, S. Autonomous Merchant Vessels: Examination of Factors That Impact the Effective Implementation of Unmanned Ships. Aust. J. Marit. Ocean Aff. 2016, 8, 206–222. [Google Scholar] [CrossRef]
- Höyhtyä, M.; Martio, J. Integrated Satellite-Terrestrial Connectivity for Autonomous Ships: Survey and Future Research Directions. Remote Sens. 2020, 12, 2507. [Google Scholar] [CrossRef]
- Kobyliński, L. Smart Ships–Autonomous or Remote Controlled? Zesz. Nauk. Akad. Mor. W Szczec. 2018, 53, 28–34. [Google Scholar] [CrossRef]
- Ottesen, A.E. Situation Awareness in Remote Operation of Autonomous Ships Shore Control Center Guidelines; Department of Product Design, Norwegian University of Science and Technology: Trondheim, Norway, 2015; pp. 1–12. [Google Scholar]
- Christiansen, M.; Hellsten, E.; Pisinger, D.; Sacramento, D.; Vilhelmsen, C. Liner Shipping Network Design. Eur. J. Oper. Res. 2020, 286, 1–20. [Google Scholar] [CrossRef]
- Meersman, H.; Moschouli, E.; Sys, C.; van de Voorde, E.; Vanelslander, T.; van Hassel, E.; Friedhoff, B.; Hoyer, K.; Tenzer, M.; Hekkenberg, R. Identifying Cost Performance Indicators for a Logistics Model for Vessel Trains. In Maritime Supply Chains; Elsevier: Amsterdam, The Netherlands, 2020. [Google Scholar] [CrossRef]
- Munim, Z.H. Autonomous Ships: A Review, Innovative Applications and Future Maritime Business Models. Supply Chain Forum 2019, 20, 266–279. [Google Scholar] [CrossRef]
- Colling, A.; Hekkenberg, R. Autonomous Ships–Changing Perceptions and Expectations; 2019. [Google Scholar]
- Žižlavský, O. Net Present Value Approach: Method for Economic Assessment of Innovation Projects. Procedia Soc. Behav. Sci. 2014, 156, 506–512. [Google Scholar] [CrossRef]
- vom Saal, R.J.; Mizine, I.; Deschamps, L.C.; Thorpe, R.W. Dual-Use Short Sea Shipping Trimaran Trailership HSTT-180. Mar. Technol. SNAME News 2005, 42, 132–143. [Google Scholar] [CrossRef]
- Watson, D.G.M. Practical Ship Design. In Elsevier Ocean Engineering Book Series; Elsevier Science Ltd.: Oxford, UK, 1997. [Google Scholar]
- Psaraftis, H.N. Decarbonization of Maritime Transport: To Be or Not to Be? Marit. Econ. Logist. 2019, 21, 353–371. [Google Scholar] [CrossRef]
- Awoyomi, A.; Patchigolla, K.; Anthony, E.J. CO2/SO2 Emission Reduction in CO2 Shipping Infrastructure. Int. J. Greenh. Gas Control 2019, 88, 57–70. [Google Scholar] [CrossRef]
- Allal, A.; Mansouri, K.; Youssfi, M.; Qbadou, M. Toward a Review of Innovative Solutions in the Ship Design and Perfor-mance Management for Energy-Saving and Environmental Protection. Mediterr. Eletrotechnical Conf. 2018. [Google Scholar] [CrossRef]
- Tam, K.; Jones, K. Cyber-Risk Assessment for Autonomous Ships. In Proceedings of the 2018 International Conference on Cyber Security and Protection of Digital Services, Cyber Security 2018, Abu Dhabi, UAE, 2 April 2018. [Google Scholar] [CrossRef]
- Kim, M.; Joung, T.; Jeong, B.; Park, H. Autonomous Shipping and Its Impact on Regulations, Technologies, and Industries. J. Int. Marit. Saf. Environ. Aff. Shipp. 2020, 4, 17–25. [Google Scholar] [CrossRef]
- Furuichi, M.; Shibasaki, R. Cascade Strategy of Container Terminals to Maximize Their Quantitative and Qualitative Capacity. In Proceedings of the IAME 2015 Conference, Kuala Lumpur, Malaysia, 23–27 August 2015. [Google Scholar]
- Vervoort, M.; Van Casteren, R.; Decorte, C. Embedding Teaching-Student-Research Nexus in 2018: A Case Study in Big Data Analysis in Nautical Services. Edulearn Proc. 2018, 1, 4204–4209. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).