
The Design and Implementation of an Inertial GNSS Odometer Integrated Navigation System Based on a Federated Kalman Filter for High-Speed Railway Track Inspection


Abstract
:1. Introduction
2. Basic Principles of the Integrated Navigation System for the Inertial Track Geometry State Detector
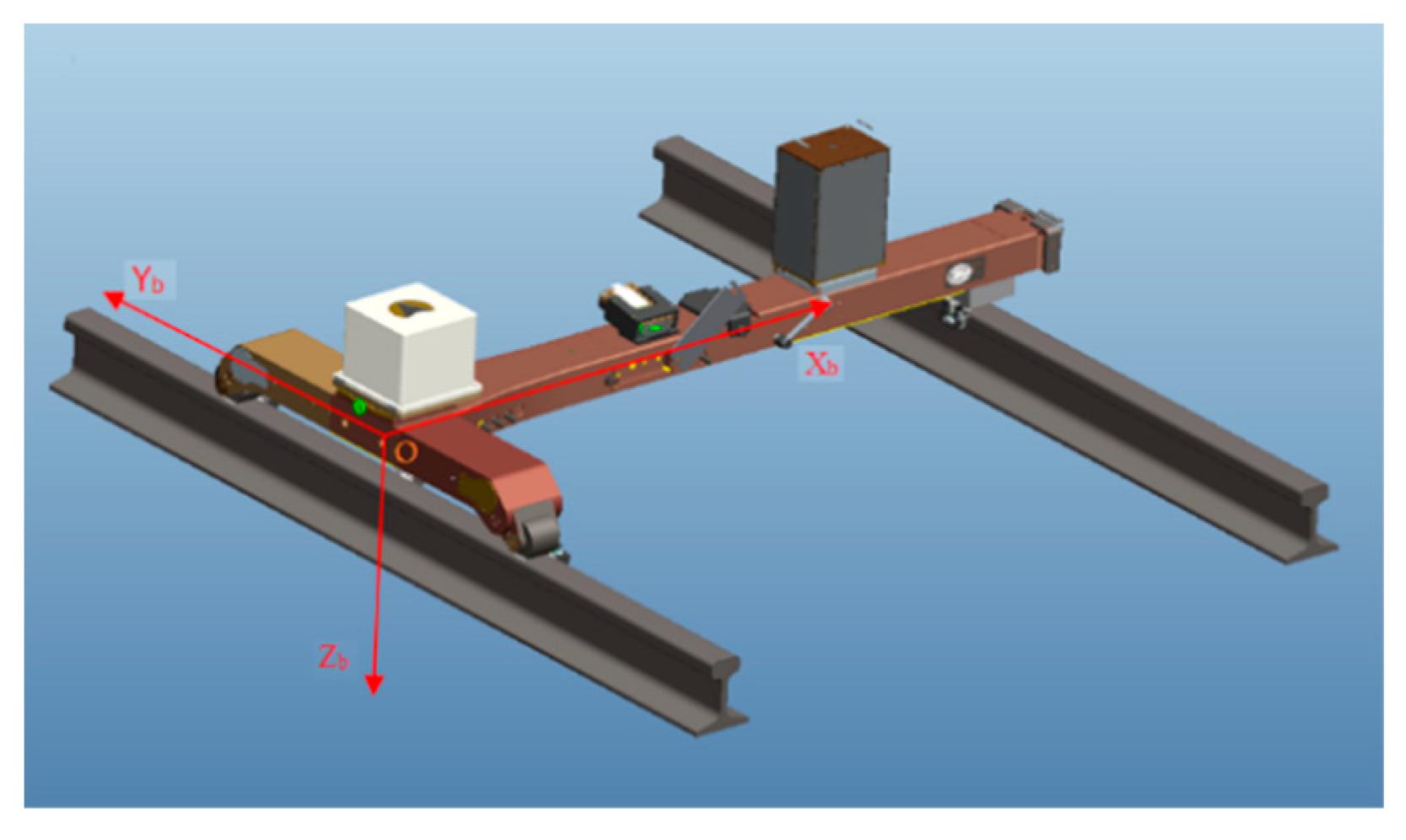
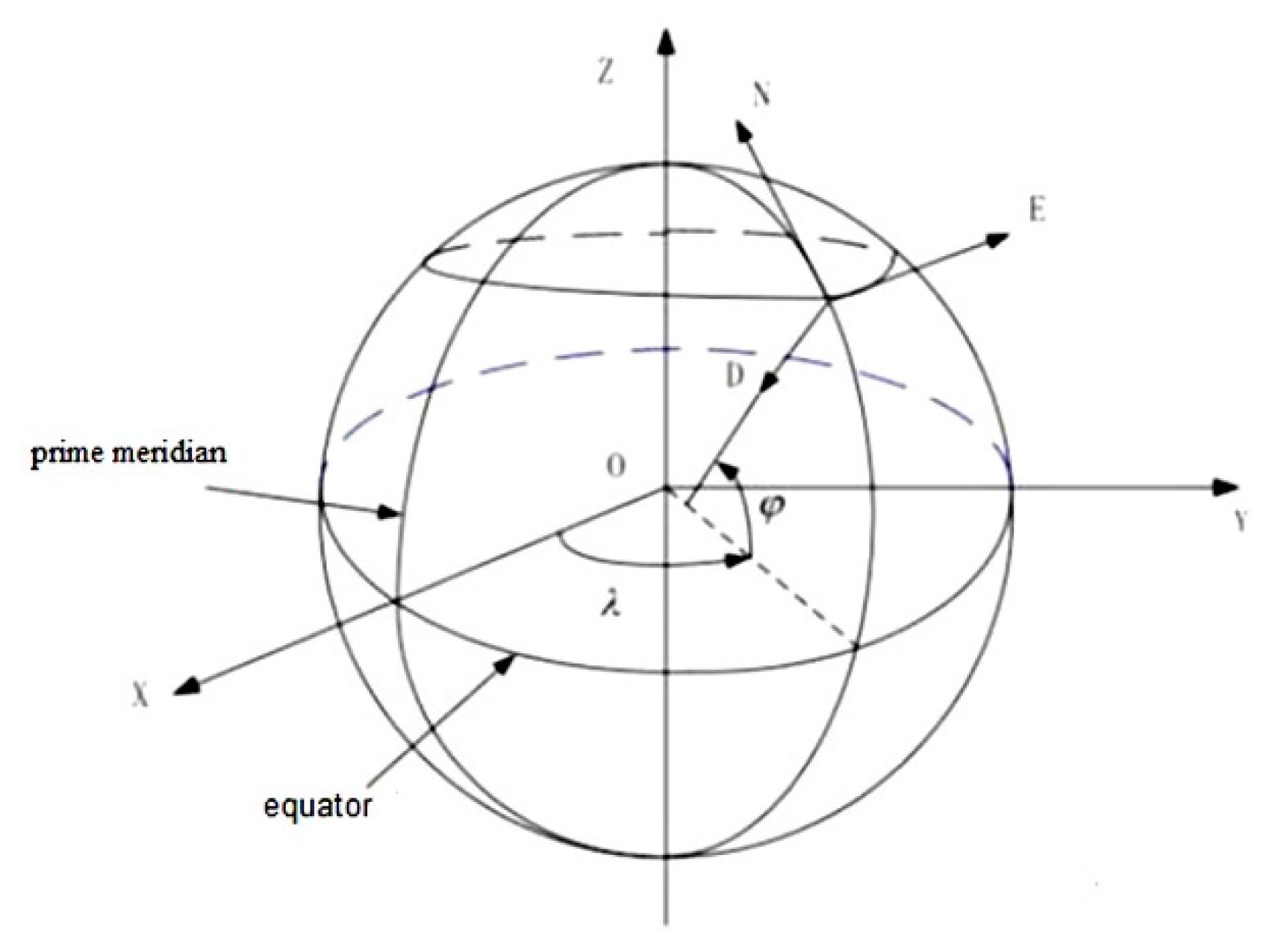
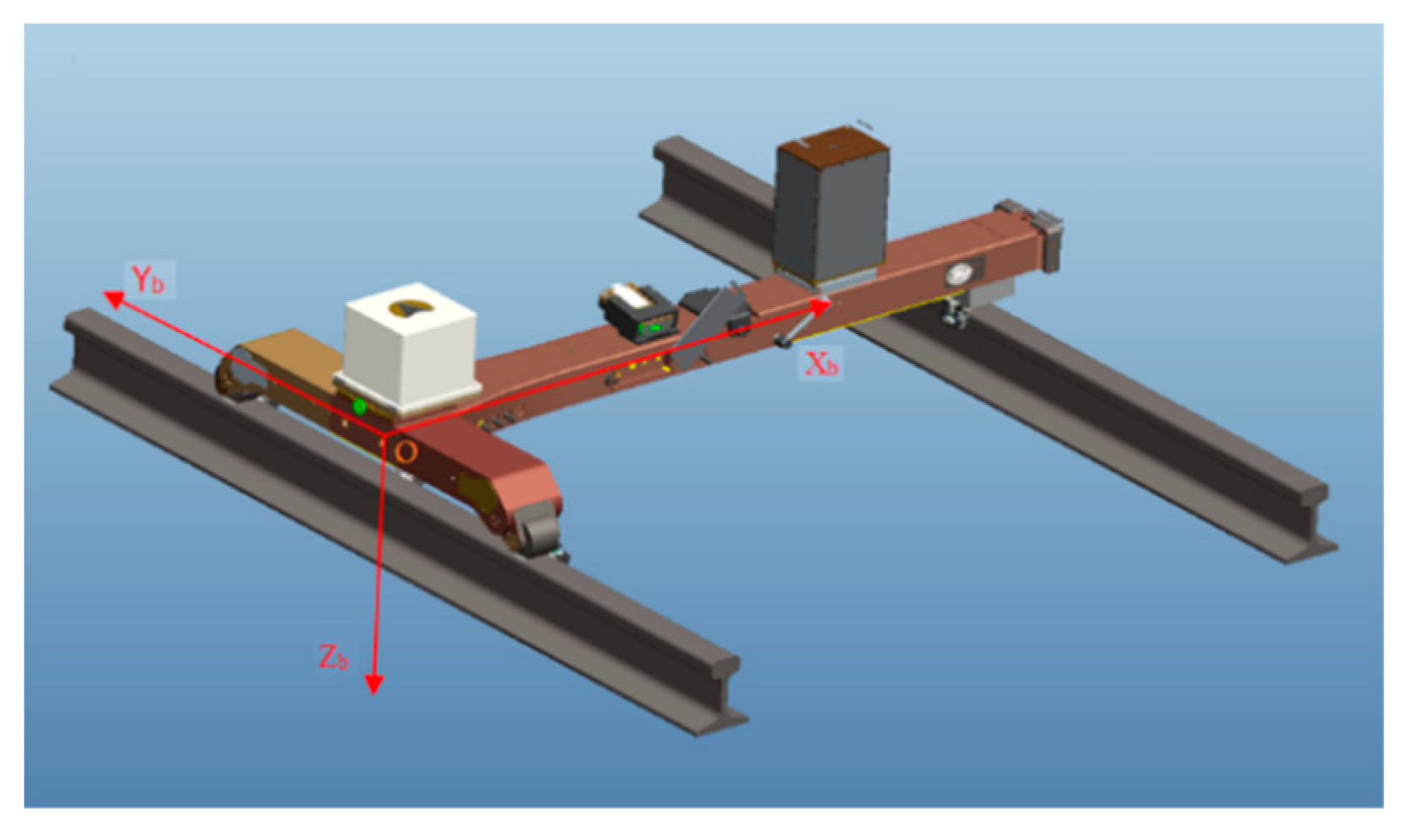
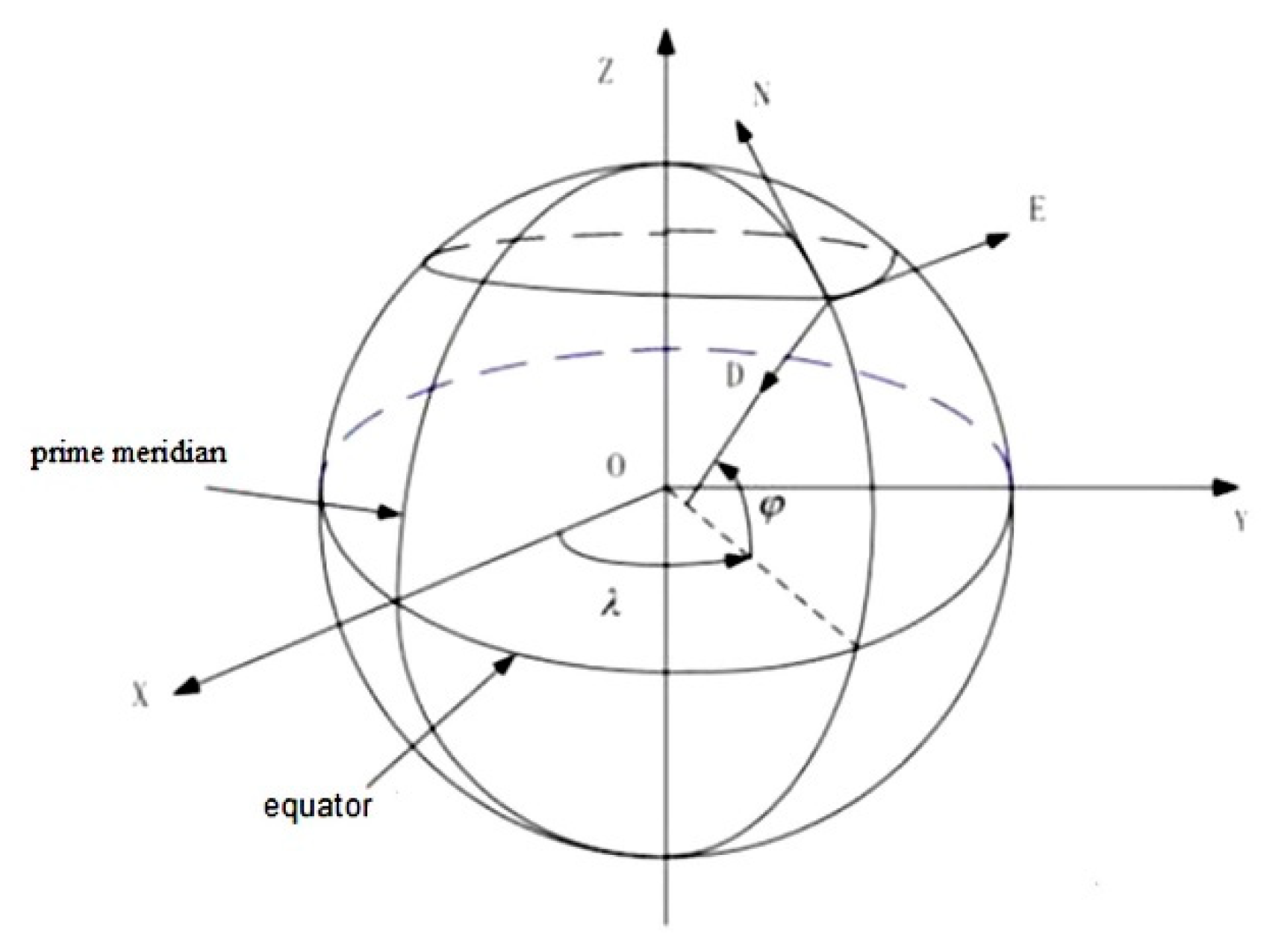
2.1. Definition of the Common Coordinate System
- Carrier coordinate system (“b system”):
- Geographical coordinate system (“n system”):
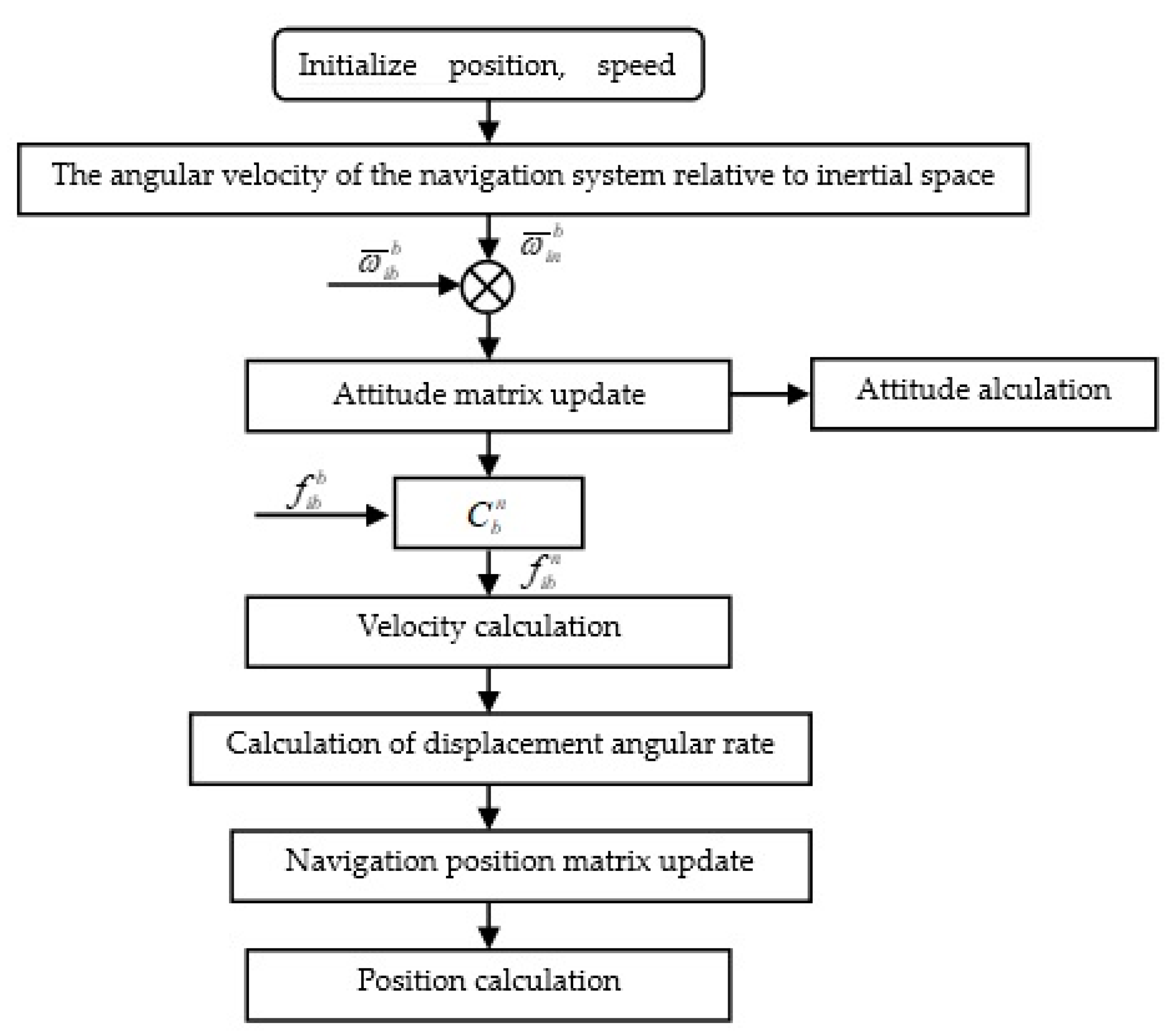
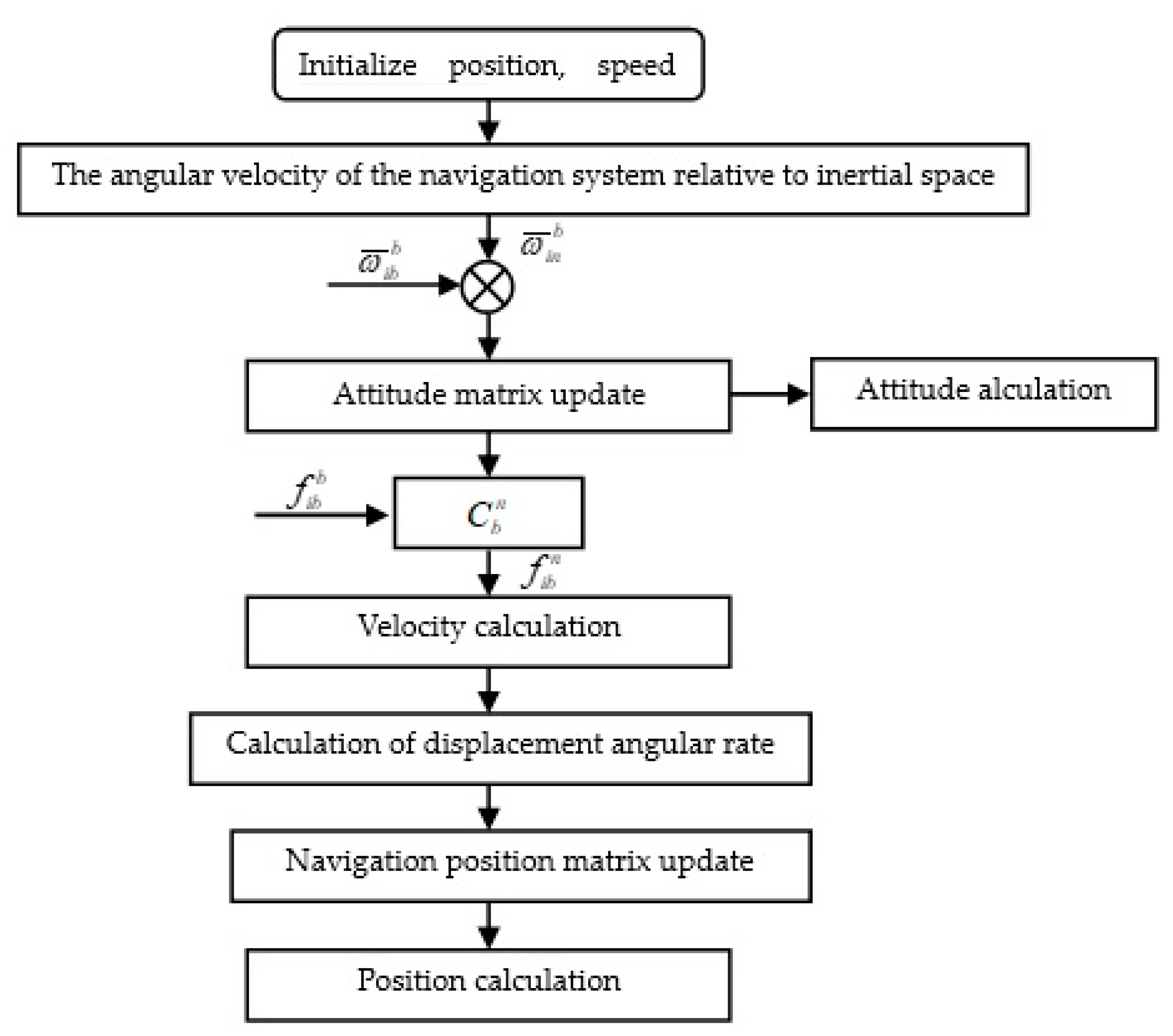
2.2. Strapdown Solution Arrangement of Inertial Navigation System
3. Federated Kalman Filter Design
3.1. Error Model of Strapdown Inertial Navigation System
3.2. Inertial/Odometer Dead-Reckoning Error Model
3.2.1. Position Error Equation of Dead Reckoning
3.2.2. Dead-Reckoning Attitude Error Equation
3.3. Kalman Filtering Algorithm
3.4. Kalman Filtering Algorithm for Inertial/Satellite/Odometer Integrated Navigation
3.5. Kalman Filter Algorithm for Inertial/Odometer Integrated Navigation
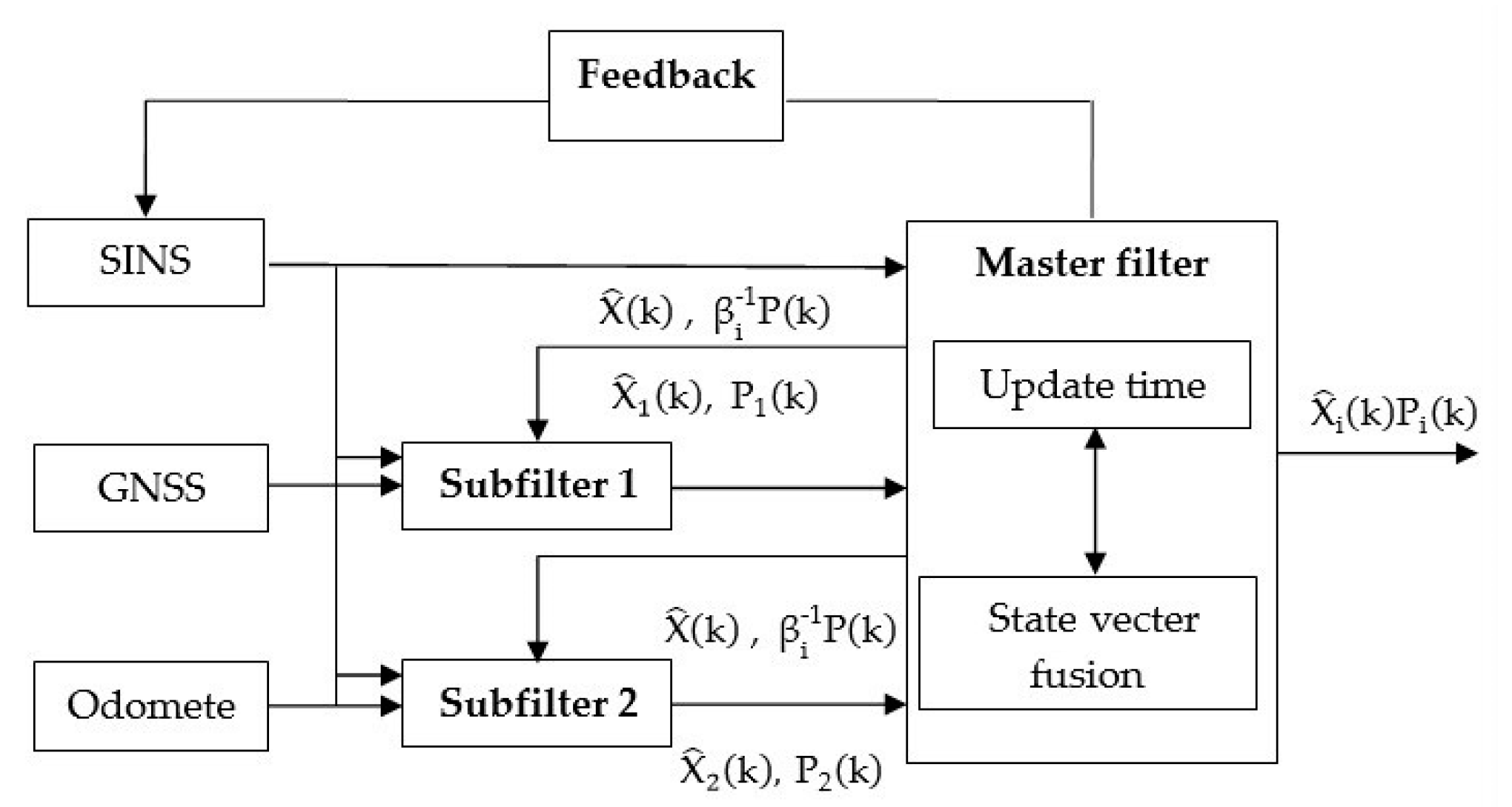
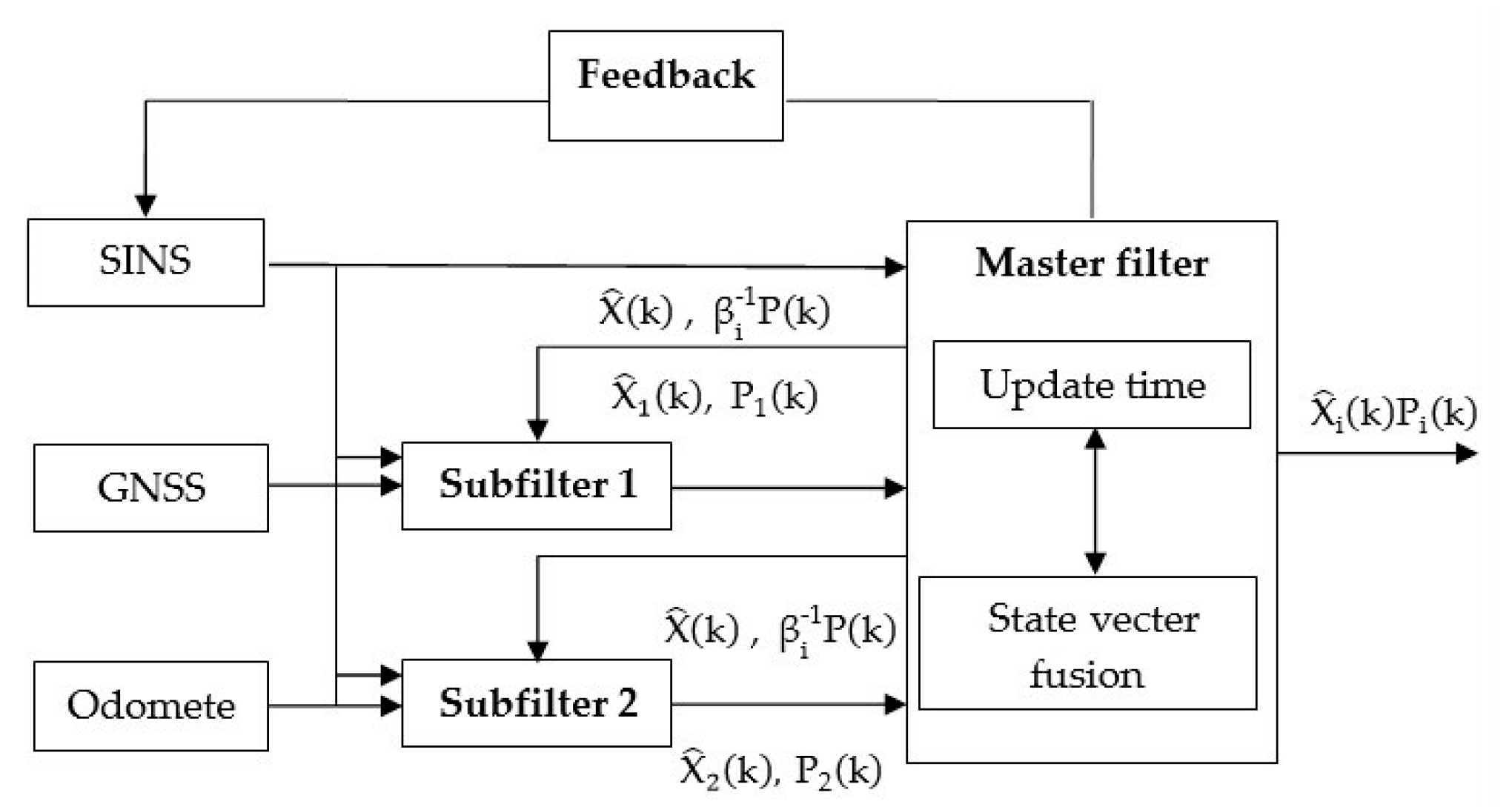
3.6. Algorithm Structure of Federated Kalman Filter for the Inertial/GNSS/Odometer Integrated Navigation System
3.6.1. Structure of the Federated Kalman Filter
3.6.2. State Vector Fusion Process
3.6.3. Information Fusion Process
3.6.4. Information Distribution Method Based on Orthogonality of Innovation and Piecewise Smooth Activation Function
4. Data Smoothing Algorithm
5. Development and Accuracy Verification of Track Geometry State Detector Based on an Inertial/GNSS/Odometer Integrated Navigation System
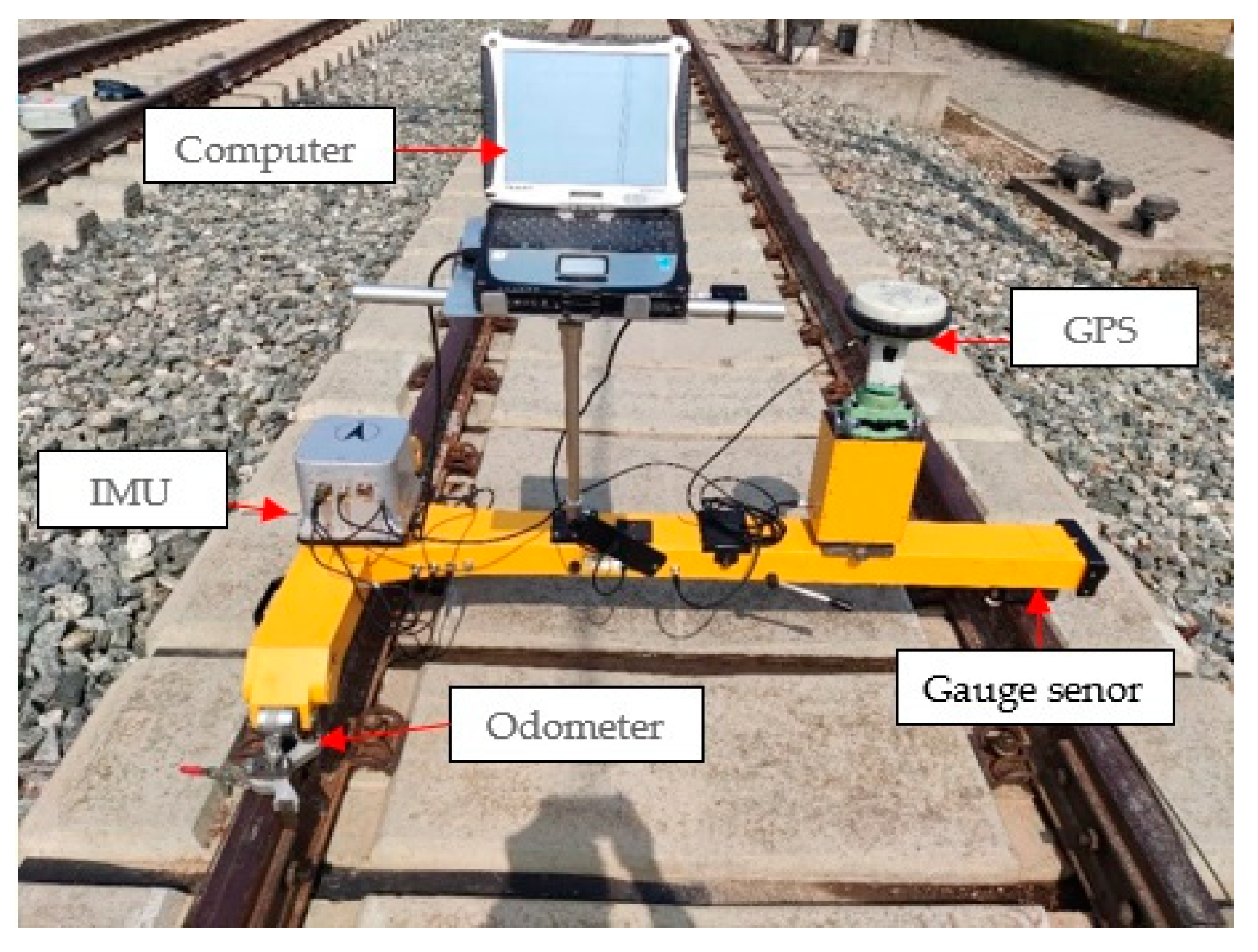
5.1. Hardware Scheme of Inertial Track Geometry State Detector
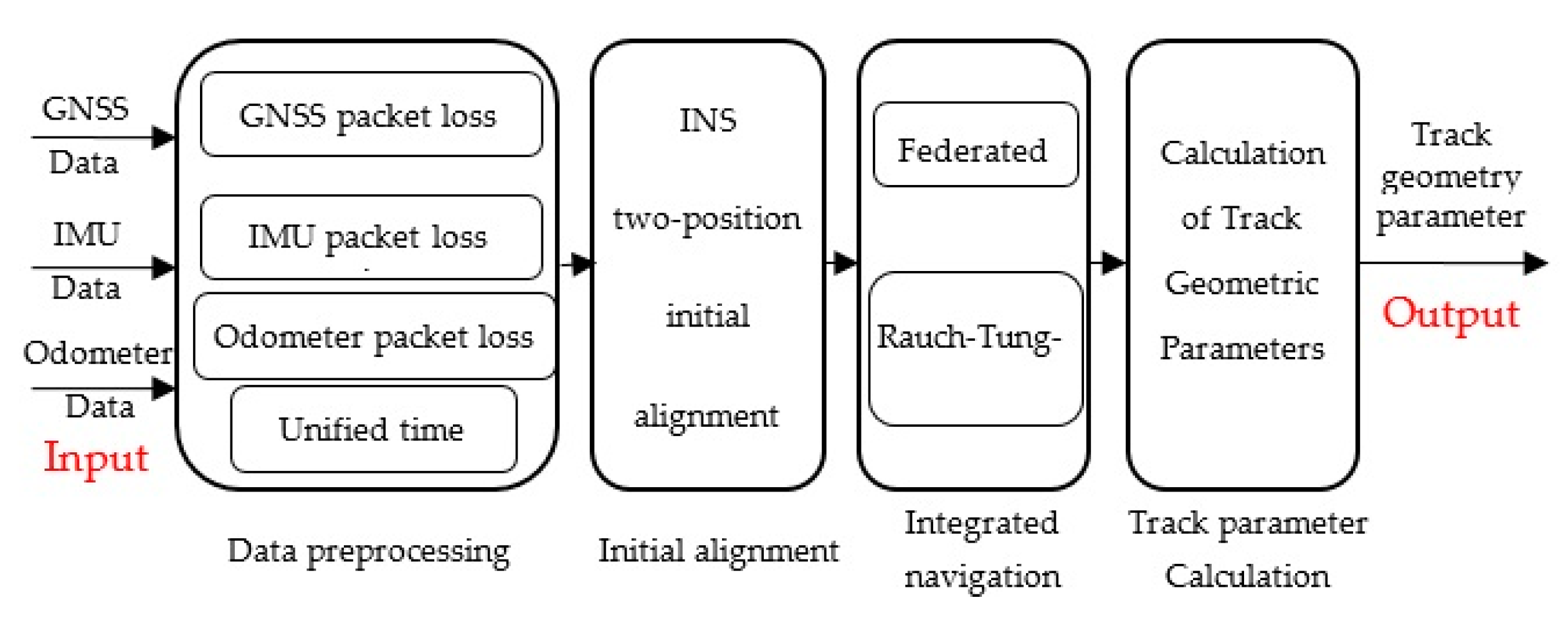
5.2. Software Scheme of Track Geometry State Detector
5.3. Detection Accuracy Results and Analysis of Inertial Track Geometry State Detector
5.3.1. Selection of Test Field and Establishment of Test Reference
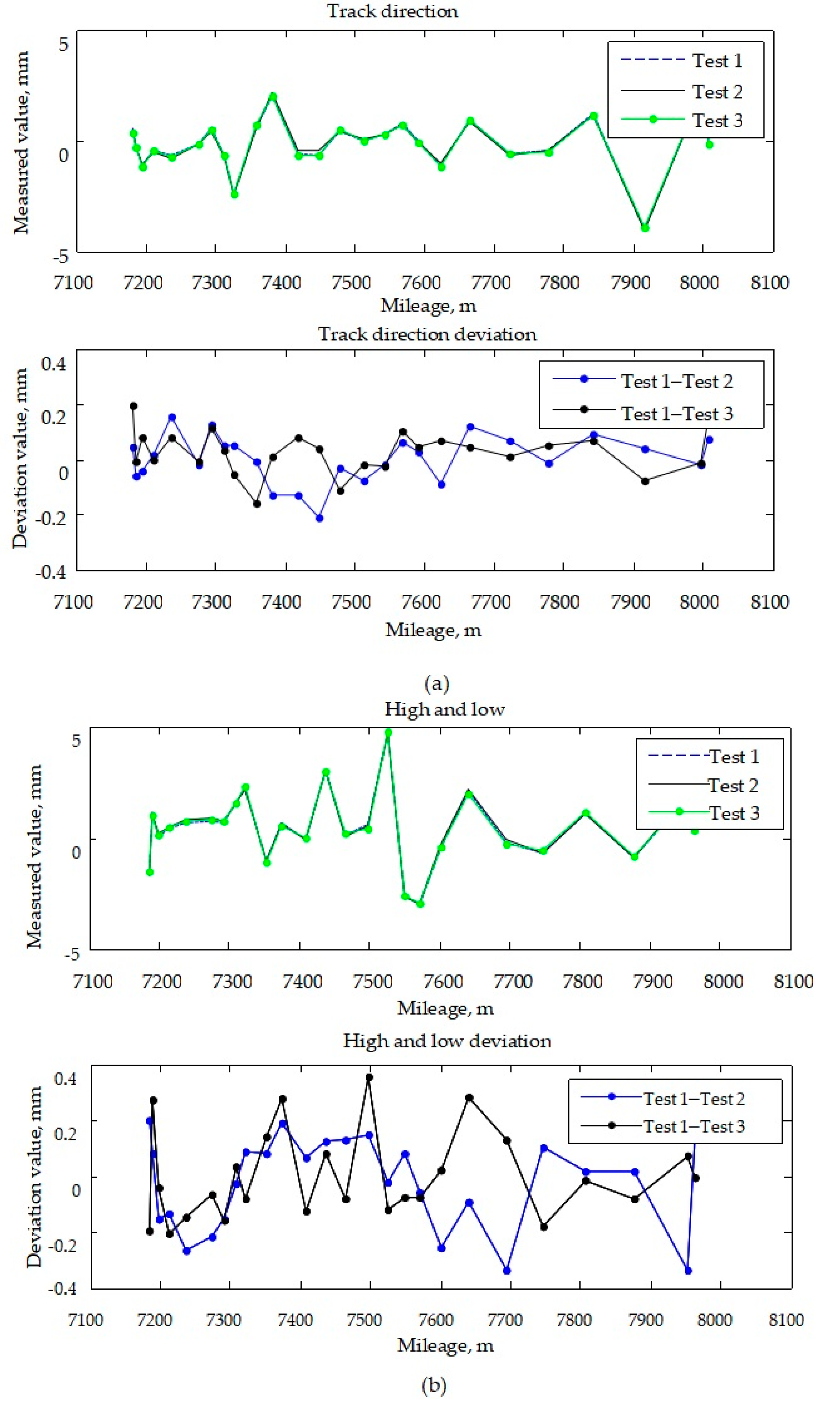
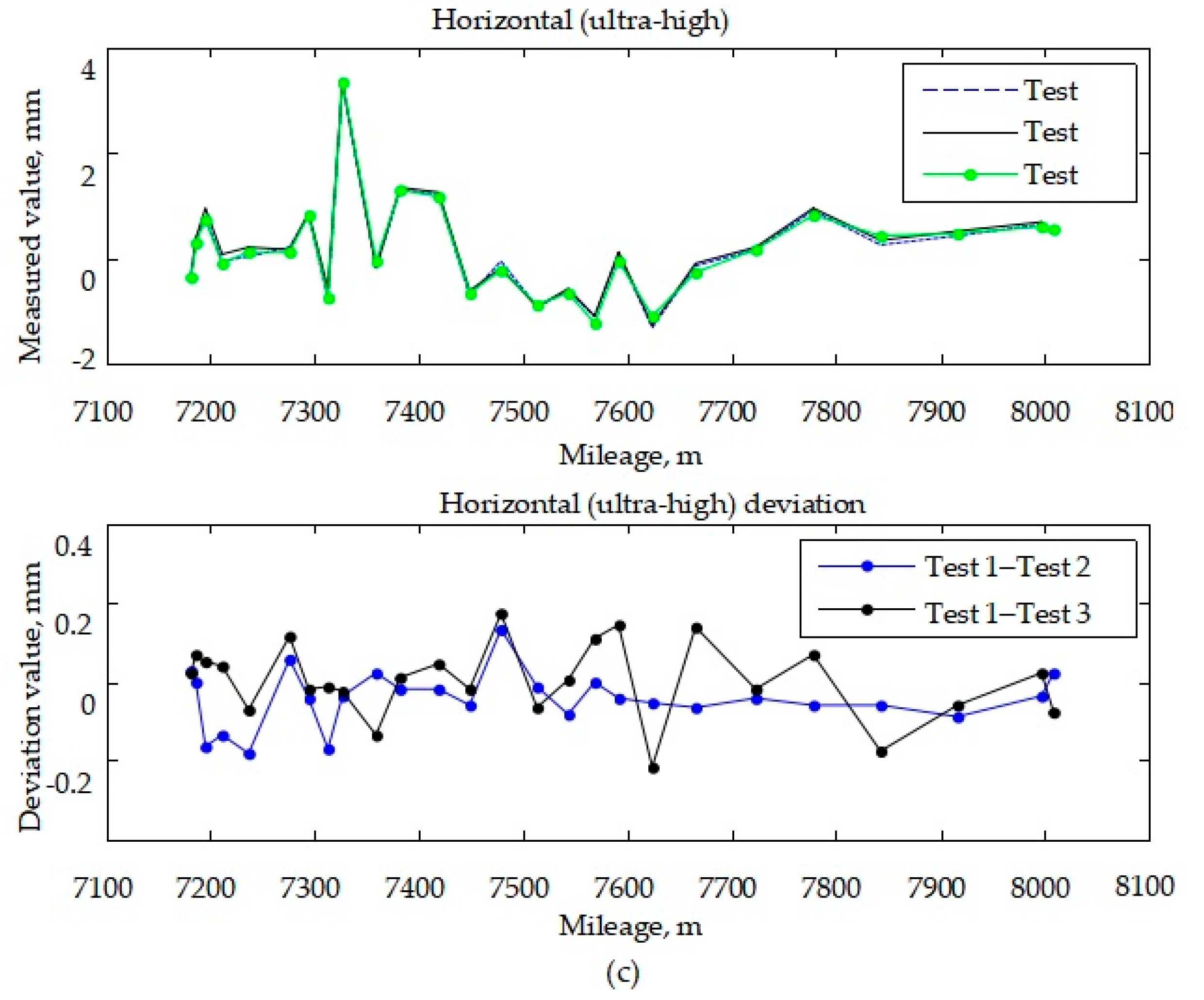
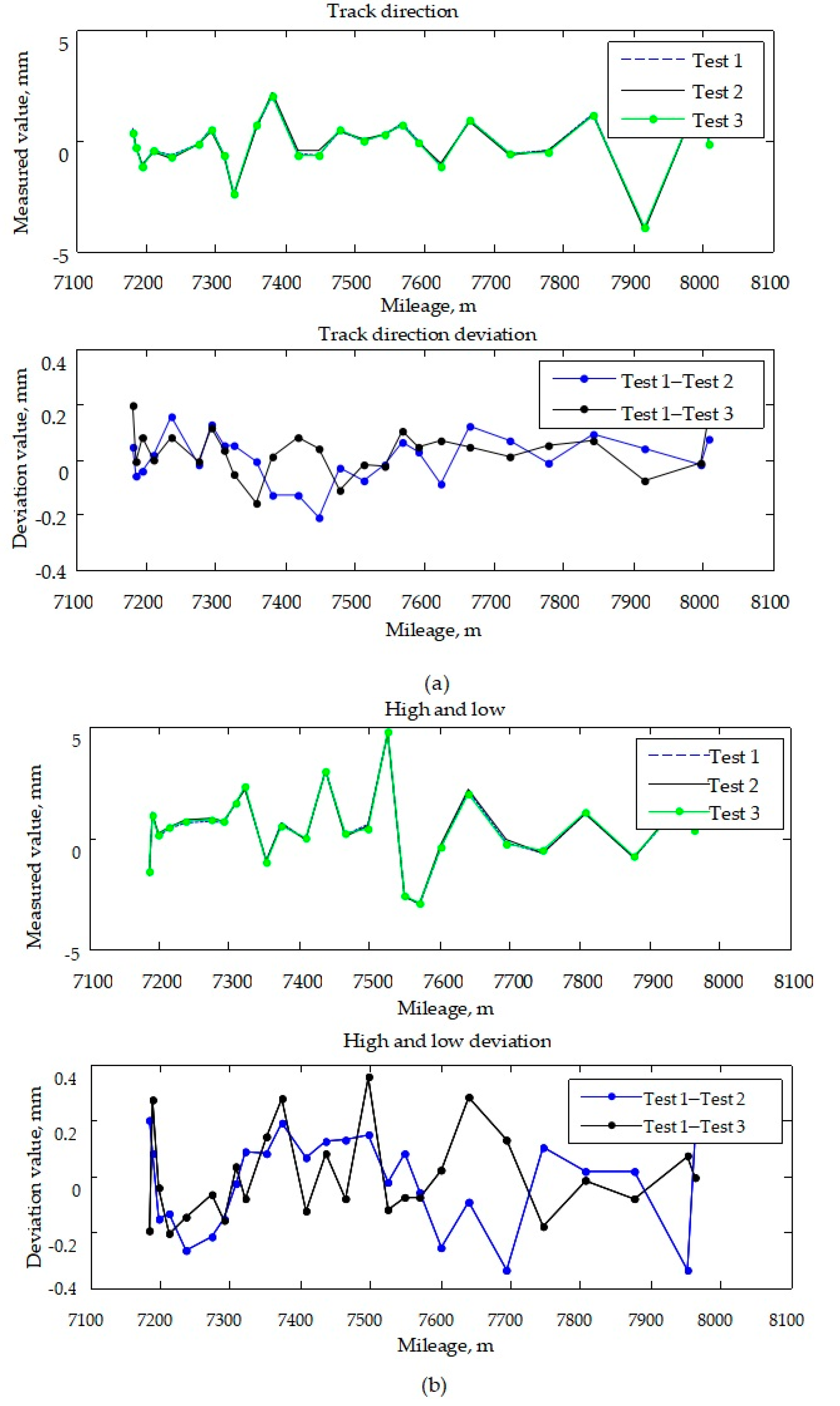
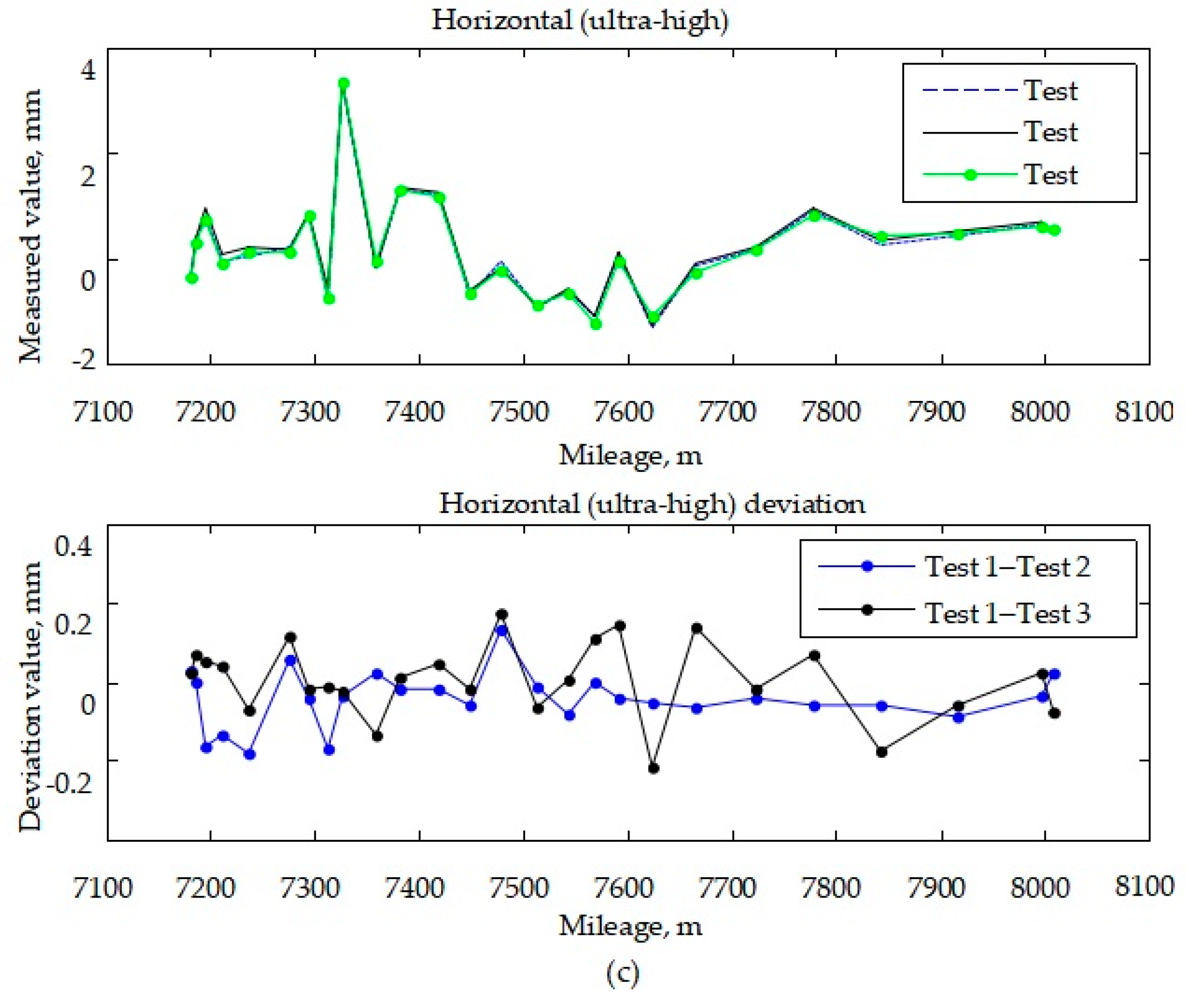
5.3.2. Measurement Accuracy Repeatability Test
5.3.3. Accuracy Consistency Analysis of Track Geometric Parameter Detection
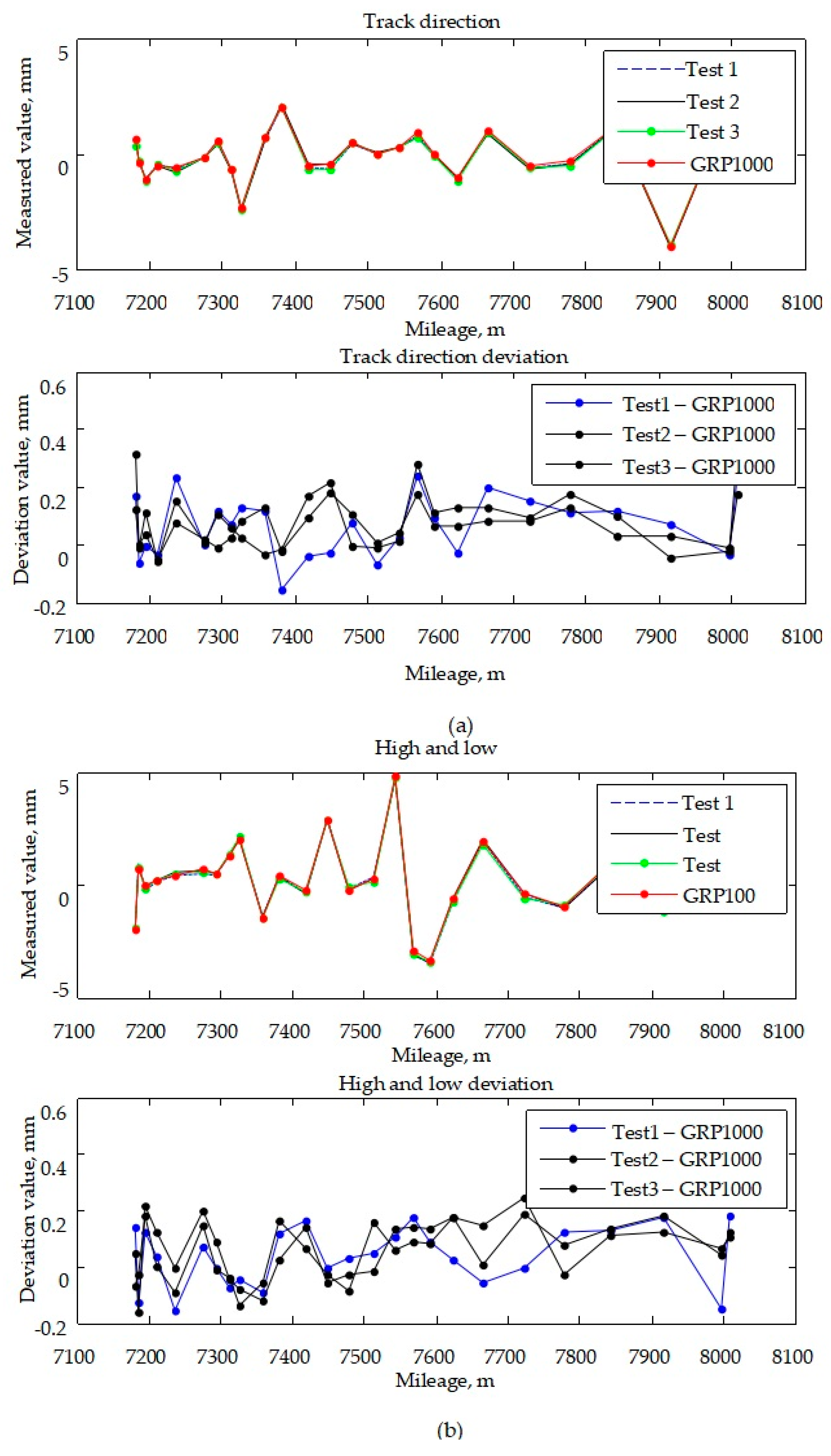
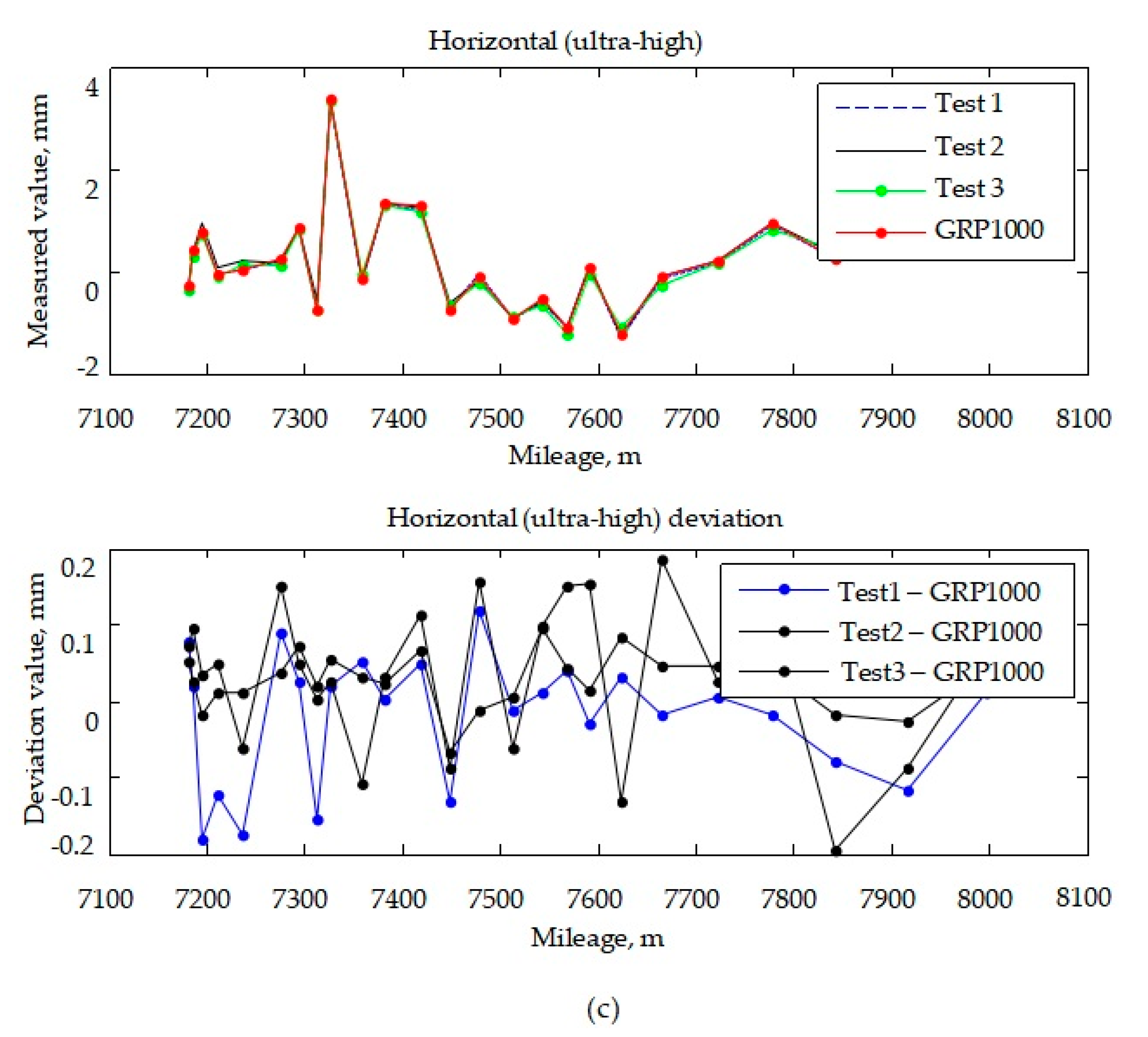
5.3.4. Test Results Comparison
- Continue to study the inertial/GNSS/odometer integrated navigation post-filtering algorithm. This algorithm is the core of the inertial/GNSS/odometer integrated navigation system and the key to improving its accuracy. The attitude calculation accuracy of the integrated navigation system has already been improved.
- The next step is to carry out research on the detection and correction methods of data outliers and noise of the four types of sensors (gyroscope, accelerometer, satellite positioning system, and odometer), control the noise from the source, and improve the accuracy of the inertial/GNSS/odometer integrated navigation system.
- In the future, the federated filtering algorithm should be tested for computing power and fault tolerance using longer line sets and more data.
6. Conclusions
- The information distribution coefficient of the state vector fusion algorithm is determined based on the orthogonality of innovation and the DOP value of the satellite signal, which improves the detection accuracy of the inertial track detector.
- The data-smoothing algorithm based on forward filtering and reverse smoothing improved the accuracy of integrated navigation and improved the detection accuracy of the inertial trajectory geometry state detector.
- A high-speed railway track geometry parameter tester system was constructed and developed. The measurement accuracy of the track geometry parameters was better than 0.2 mm, and the detection speed was about 3 km/h, which meets the requirements of high accuracy and high efficiency of high-speed railway track geometry detection.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sánchez, A.; Bravo Trinidad, J.L.; González Ramiro, A. Estimating the accuracy of track-surveying trolley measurements for railway maintenance planning. J. Surv. Eng. 2016, 143, 5016008. [Google Scholar] [CrossRef]
- Li, Q.; Mao, Q. Progress on dynamic and precise engineering surveying for pavement and task. Acta Geodaetica et Geophysica Sinica 2017, 46, 1734–1741. [Google Scholar] [CrossRef]
- Li, Q.; Bai, Z.; Li, Q.; Wu, F.; Chen, B.; Xin, H.; Cheng, Y. Geometric design of an outdoor three-dimensional kinematic verification field for a position and orientation system. Sci. Technol. 2019, 59, 895–901. [Google Scholar] [CrossRef]
- Liu, W.; Tu, W.; Yang, F.; Yang, Z. Research on integrated inspection and monitoring system of high speed railway infrastructure. China Railw. 2019, 22–26. [Google Scholar] [CrossRef]
- BSI. Railway applications/Track-track geometry quality-Part 1: Characterisation of track geometry. In BS EN 13848-1:2003+A1:2008; British Standards Institution: London, UK, 2008. [Google Scholar]
- NRA. Administrative Measures for the Construction Safety of Railway Business Lines. In Rail Transport (2012) No.280; China Railway Press: Beijing, China, 2012. [Google Scholar]
- NRA. Railway Line Repair Rules. In Rail Transport (2006) No.146; China Railway Press: Beijing, China, 2006. [Google Scholar]
- Han, F. Research on the Status Detection and Evaluation Technology of Existing Railway Based on Point cloud information. Ph.D. Thesis, Southwest Jiaotong University, Chengdu, China, 2014. [Google Scholar]
- Luo, L.; Zhang, G.; Wu, W.; Chai, X. Control. of Track Smoothness of Wheel-Rail System; China Railway Press: Beijing, China, 2006; pp. 1–286. [Google Scholar]
- She, Y. Track Geometric State Inspection of High-Speed Railway by Vehicle-Borne Close-Range Photogrammetry. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, 2014. [Google Scholar]
- Hong, S. Study on the Measurement Method of Track Inspection Car. Master’s Thesis, Guangdong University of Technology, Chengdu, China, 2015. [Google Scholar]
- Chen, Q. Research on the Railway Track Geometry Surveying Technology Based on Aided INS. Ph.D. Thesis, Wuhan University, Wuhan, China, 2016. [Google Scholar]
- Wu, W. Research on the Precision Measurement Method of Ballastless Track Based on the Vehicle ETS without Leveling in High-Speed Railway. Ph.D. Thesis, Nanchang University, Nanchang, China, 2018. [Google Scholar]
- Bai, H.; Zhang, F.; Zhang, W. Rapid Measuring Instrument for Track Geometric State. China Patent CN201520215786.9, 10 April 2015. [Google Scholar]
- Wildi, T.; Glaus, R. A Multisensor Platform for Kinematic Track Surveying. In Proceedings of the 2nd Symposium on Geodesy for Geotechnical and Structural Engineering, Berlin, Germany, 21–24 May 2002; pp. 1–10. [Google Scholar]
- Akpinar, B.; Gülal, E. Railway track geometry determination using adaptive Kalman filtering model. Measurement 2013, 46, 639–645. [Google Scholar] [CrossRef]
- Akpinar, B.; Gülal, E. Multisensor railway track geometry surveying system. IEEE Trans. Instrum. Meas. 2012, 61, 190–197. [Google Scholar] [CrossRef]
- Wei, H. Research on the Track Irregularities Survey Theory and Relevant Adjustment Technologies of HSR Track. Ph.D. Thesis, Nanchang University, Nanchang, China, 2014. [Google Scholar]
- Fu, Q.; He, F.; Li, S.; Fan, S.; Peng, C. New Type Track Inspection Instrument. China Patent CN200620035696.2, 25 September 2006. [Google Scholar]
- Tang, W. GJY-T-4 Type Track Inspection Instrument Adjustment Circuit Design. Master’s Thesis, University of Electronic Science and Technology of China, Chengdu, China, 2010. [Google Scholar]
- Yu, W. Research on the Data Processing Technology of the Second-Generation Track Inspection Instrument. Master’s Thesis, Nanchang University, Nanchang, China, 2009. [Google Scholar]
- Han, Y. A Combined Satellite Navigation and Inertial Measurement Orbit Measurement System and Method. China Patent CN201310014507.8, 15 January 2013. [Google Scholar]
- Han, Y. GPS Track Irregularity Detection System and Detection Method. China Patent CN201010230227.7, 19 July 2010. [Google Scholar]
- Chen, Q.; Niu, X.; Zuo, L.; Zhang, T.; Xiao, F.; Liu, Y.; Liu, J. A railway track geometry measuring trolley system based on aided INS. Sensors 2018, 18, 538. [Google Scholar] [CrossRef] [Green Version]
- Li, Q.; Bai, Z.; Chen, B.; Guo, J.; Xin, H.; Cheng, Y.; Li, Q.; Wu, F. A novel track measurement system based on GNSS/INS and multisensor for high-speed railway. Acta Geodaetica et Geophysica Sinica 2020, 49, 569–579. [Google Scholar] [CrossRef]
- Gao, Z.; Ge, M.; Li, Y.; Shen, W.; Zhang, H.; Schuh, H. Railway irregularity measuring using Rauch-Tung-Striebel smoothed multi-sensors fusion system: Quad-GNSS PPP, IMU, odometer, and track gauge. Gps. Solut. 2018, 22. [Google Scholar] [CrossRef]
- Zhan, X.; Cui, X. Two-position Alignment Method for Inertial Navigation System of Rail Tester. Bull. Surv. Mapp. 2017, 3, 5–8. [Google Scholar]
- Zhang, X.; Cui, X.; Yan, D. Application of modified Kalman filtering restraining outliers based on orthogonality of innovation to track tester. In Proceedings of the 13th IEEE International Conference on Mechatronics and Automation, IEEE ICMA 2016, Beijing, China, 1 January 2016; pp. 171–175. [Google Scholar]
- Zhang, X.; Cui, X. Zero velocity attitude correction for railway tracks geometry measurement by inertial system. Sci. Surv. Mapp. 2017, 42, 17–21. [Google Scholar]
- Suhr, J.K.; Jang, J.; Min, D.; Jung, H.G. Sensor fusion-based low-cost vehicle localization system for complex urban environments. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1078–1086. [Google Scholar] [CrossRef]
- Meng, X.; Wang, H.; Liu, B. A robust vehicle localization approach based on GNSS/IMU/DMI/LiDAR sensor fusion for autonomous vehicles. Sensors 2017, 17, 2140. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Liu, X.; Song, Q.; Yang, Y.; Liu, Y.; Wang, L. A novel self-alignment method for SINS based on three vectors of gravitational apparent motion in inertial frame. Measurement 2015, 62, 47–62. [Google Scholar] [CrossRef]
- Yongyuan, Q. Inertial Navigation (Version 2); Science Press: Beijing, China, 2014; pp. 1–376. [Google Scholar]
- Liu, W.; Wu, J. The Analysis of satellite visibility and DOP value of GPS and Compass Navigation Systems. In Proceedings of the 3rd Annual China Satellite Navigation Academic Conference, Guagnzhou, China, 15–19 May 2012. [Google Scholar]
- Gao, J.; Fang, Y.; Yang, Z.; Zhang, Z. The Simulation Analysis of GLONASS and GPS Based on STK. Sci. Technol. Eng. 2011, 11, 3384–3387. [Google Scholar]
- Rauch, H.E.; Tung, F.; Striebel, C.T. Maximum likelihood estimates of linear dynamic systems. AIAA J. 1965, 3, 1445–1450. [Google Scholar] [CrossRef]
- Wu, X.T.; Yang, Y.; Gao, W.; Zhang, Z.S.; Pei, Z.; Peshekhonov, V.G. Attitude error compensation technology for inertial platform of airborne gravimeter based on RTS smoothing algorithm. In Proceedings of the 24th Saint Petersburg International Conference on Integrated Navigation Systems, ICINS 2017, Saint Petersburg, Russia, 1 January 2017. [Google Scholar]
- Wei, S.; Yan, J.; Teng, L. Research on high-precision INS/GPS integrated navigation offline data-processing algorithm. Comput. Simul. 2016, 33, 58–62. [Google Scholar] [CrossRef]
- Liu, J.; Yuan, X. The applicaiton of smoothing filter to GPS/INS integrated navigation system. Aerosp. Control. 1995, 36–42. [Google Scholar] [CrossRef]
- Bierman, G.J. A new computationally efficient fixed-interval, discrete-time smoother. Automatica 1983, 19, 503–511. [Google Scholar] [CrossRef]
- Gu, S.S.; Liu, J.Y.; Zeng, Q.H.; Lv, P. A Kalman filter algorithm based on exact modeling for FOG GPS/SINS integration. Optik 2014, 125, 3476–3481. [Google Scholar] [CrossRef]
- NRA. Dynamic detection and evaluation of track geometry state. In TB/T 3355-2014; China Railway Press: Beijing, China, 2014. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Model | Qualification | Parameter |
|---|---|---|---|
| Laser Gyroscope | HT-50TM | Zero Bias Stability | ≤0.01 °/h |
| Zero Bias Repeatability | ≤0.01 °/h (1σ) | ||
| Accelerometer | JN-06M | Monthly repeatability of deviation | ≤20 μg |
| I/F Conversion Circuit | GZH-06 | Scale Factor Nonlinearity | ≤1 × 10−4 |
| Zero Bias | ≤0.5 Hz | ||
| GPS | OEM719 | Data Update Rate | 50 Hz |
| Odometer | EC50P-5000 | Resolution | <0.002 |
| Displacement Transduce | SDVH20 | Resolution | ≤0.1 μm |
| Track Geometry Parameters | Measurement Accuracy by Centralized Filtering | Measurement Accuracy by Federated Filtering |
|---|---|---|
| Track direction | ≤0.33 mm | ≤0.2 mm |
| High and low | ≤0.45 mm | ≤0.2 mm |
| Horizontal (ultra-high) | ≤0.31 mm | ≤0.2 mm |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Cui, X.; Huang, B. The Design and Implementation of an Inertial GNSS Odometer Integrated Navigation System Based on a Federated Kalman Filter for High-Speed Railway Track Inspection. Appl. Sci. 2021, 11, 5244. https://doi.org/10.3390/app11115244
Zhang X, Cui X, Huang B. The Design and Implementation of an Inertial GNSS Odometer Integrated Navigation System Based on a Federated Kalman Filter for High-Speed Railway Track Inspection. Applied Sciences. 2021; 11(11):5244. https://doi.org/10.3390/app11115244
Chicago/Turabian StyleZhang, Xinchun, Ximin Cui, and Bo Huang. 2021. "The Design and Implementation of an Inertial GNSS Odometer Integrated Navigation System Based on a Federated Kalman Filter for High-Speed Railway Track Inspection" Applied Sciences 11, no. 11: 5244. https://doi.org/10.3390/app11115244
APA StyleZhang, X., Cui, X., & Huang, B. (2021). The Design and Implementation of an Inertial GNSS Odometer Integrated Navigation System Based on a Federated Kalman Filter for High-Speed Railway Track Inspection. Applied Sciences, 11(11), 5244. https://doi.org/10.3390/app11115244