
Model-Based Slippage Estimation to Enhance Planetary Rover Localization with Wheel Odometry




Abstract
:1. Introduction
2. Methods
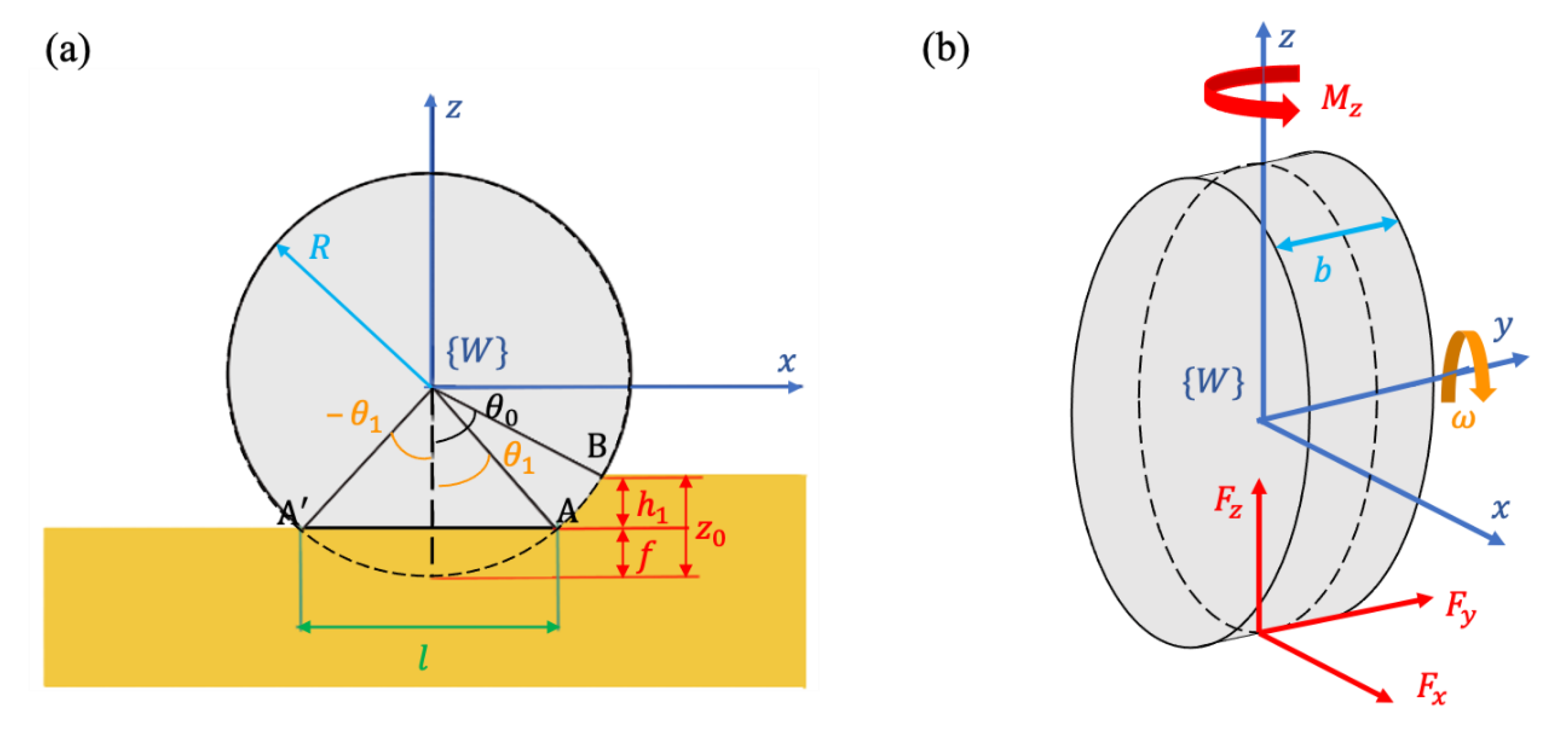
2.1. Dynamical Model and Slippage Estimation
2.2. Soil and Rover Properties
3. Traversability Analyses
3.1. Trajectory Integration with the Dynamical Model
3.2. Traversability over Steep Terrains
4. Wheel Odometry Correction for Rover’s Localization
4.1. Simulated Trajectory
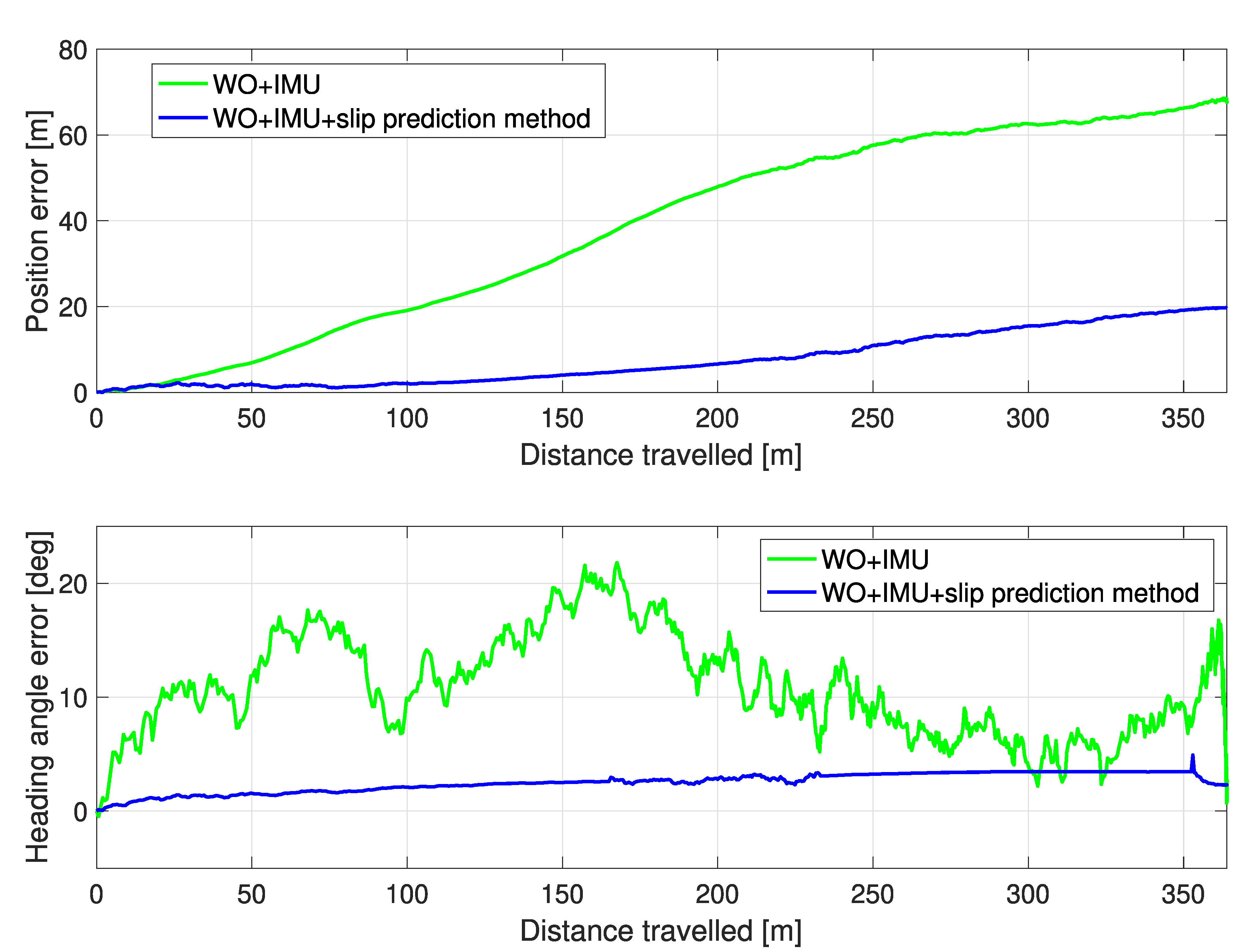
4.2. Rover’s Localization
5. Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Williams, R.M.E.; Grotzinger, J.P.; Dietrich, W.E.; Gupta, S.; Sumner, D.Y.; Wiens, R.C.; Mangold, N.; Malin, M.C.; Edgett, K.S.; Maurice, S.; et al. Martian fluvial conglomerates at Gale Crater. Science 2013, 340, 1068–1072. [Google Scholar] [CrossRef] [PubMed]
- Freissinet, C.; Glavin, D.P.; Mahaffy, P.R.; Miller, K.E.; Eigenbrode, J.L.; Summons, R.E.; Brunner, A.E.; Buch, A.; Szopa, C.; Franz, H.B.; et al. Organic molecules in the Sheepbed Mudstone, Gale Crater, Mars. J. Geophys. Res. Planets 2015, 120, 495–514. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Witze, A. A month on Mars: What NASA’s Perseverance rover has found so far. Nature 2021, 591, 509–510. [Google Scholar] [CrossRef] [PubMed]
- Lindemann, R.A.; Voorhees, C.J. Mars Exploration Rover mobility assembly design, test and performance. In Proceedings of the 2005 IEEE International Conference on Systems, Man and Cybernetics, Waikoloa, HI, USA, 12 October 2005; pp. 450–455. [Google Scholar]
- Callas, J.L. Mars Exploration Rover Spirit end of mission report. Tech. Rep. JPL D-92756, JPL Publication, 16–2. 2015. Available online: https://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20160001767.pdf (accessed on 2 September 2020).
- Rothrock, B.; Papon, J.; Kennedy, R.; Cunningham, C.; Heverly, M.; Ono, M. SPOC: Deep learning-based terrain classification for Mars rover missions. In Proceedings of the AIAA SPACE 2016, Long Beach, CA, USA, 13–16 September 2016. [Google Scholar]
- Antonelli, G.; Chiaverini, S.; Fusco, G. A calibration method for odometry of mobile robots based on the least-squares technique: Theory and experimental validation. IEEE Trans. Robot. 2005, 21, 994–1004. [Google Scholar] [CrossRef]
- Borenstein, J.; Feng, L. Measurement and correction of systematic odometry errors in mobile robots. IEEE Trans. Robot. Autom. 1996, 12, 869–880. [Google Scholar] [CrossRef] [Green Version]
- Lee, K.; Chung, W. Calibration of kinematic parameters of a Car-Like Mobile Robot to improve odometry accuracy. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 2546–2551. [Google Scholar]
- Ishigami, G.; Miwa, A.; Nagatani, K.; Yoshida, K. Terramechanics-based model for steering maneuver of planetary exploration rovers on loose soil. J. Field Robot. 2007, 24, 233–250. [Google Scholar] [CrossRef]
- Maimone, M.; Cheng, Y.; Matthies, L. Two years of Visual Odometry on the Mars Exploration Rovers. J. Field Robot. 2007, 24, 169–186. [Google Scholar] [CrossRef] [Green Version]
- Cheng, Y.; Maimone, M.; Metthies, L. Visual Odometry on the Mars Exploration Rovers. In Proceedings of the 2005 IEEE International Conference on Systems, Man and Cybernetics, Waikoloa, HI, USA, 12 October 2005. [Google Scholar]
- Olson, C.F.; Matthies, L.H.; Schoppers, M.; Maimone, M. Rover navigation using stereo ego-motion. Robot. Auton. Syst. 2003, 43, 215–229. [Google Scholar] [CrossRef]
- Rekleitis, I.; Bedwani, J.-L.; Dupuis, E. Autonomous planetary exploration using LIDAR data. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 12–17 May 2009; pp. 3025–3030. [Google Scholar]
- Reina, G.; Ishigami, G.; Nagatani, K.; Yoshida, K. Odometry correction using visual slip angle estimation for planetary exploration rovers. Adv. Robot. 2010, 24, 359–385. [Google Scholar] [CrossRef]
- Ojeda, L.; Cruz, D.; Reina, G.; Borenstein, J. Current-based slippage detection and odometry correction for mobile robots and planetary rovers. IEEE Trans. Robot. 2006, 22, 366–378. [Google Scholar] [CrossRef] [Green Version]
- Yamauchi, G.; Nagatani, K.; Hashimoto, T.; Fujino, K. Slip-compensated odometry for tracked vehicle on loose and weak slope. Robomech. J. 2017, 4. [Google Scholar] [CrossRef] [Green Version]
- Censi, A.; Franchi, A.; Marchionni, L.; Oriolo, G. Simultaneous calibration of odometry and sensor parameters for mobile robots. IEEE Transections Robot. 2013, 29, 475–492. [Google Scholar] [CrossRef]
- Bekker, M.G. Introduction to Terrain-Vehicle Systems; The University of Michigan Press: Ann Arbor, MI, USA, 1969; ISBN 978-0-4720-4144-2. [Google Scholar]
- Wong, J.Y. Terramechanics and Off-Road Vehicle Engineering: Terrain Behaviour, Off-Road Vehicle Performance and Design, 2nd ed.; Butterworth-Heinemann: Amsterdam, The Netherlands, 2010; ISBN 978-0-7506-8561-0. [Google Scholar]
- Wong, J.Y. Theory of Ground Vehicles, 4th ed.; Wiley: New York, NJ, USA, 2008; ISBN 978-0-470-17038-0. [Google Scholar]
- Bauer, R.; Leung, W.; Barfoot, T. Experimental and simulation results of wheel-soil interaction for planetary rovers. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005. [Google Scholar]
- Heverly, M.; Matthews, J.; Lin, J.; Fuller, D.; Maimone, M.; Biesiadecki, J.; Leichty, J. Traverse performance characterization for the Mars Science Laboratory rover. J. Field Robot. 2013, 30, 835–846. [Google Scholar] [CrossRef]
- Grandy, D.; Panek, N.; Routhier, G.; Ridolfi, P. Development and qualification of the ExoMars Bogie Electro–Mechanical Assembly (BEMA) rotary actuators. In Proceedings of the 18th European Space Mechanisms and Tribology Symposium 2019, Munich, Germany, 18–20 September 2019. [Google Scholar]
- ESA ExoMars Landing Site Working Group. ExoMars 2018 Landing Site Selection User’s Manual; ESA Ref.: EXM-SCI-LSS-ESA/IKI-003. 2013. Available online: https://sci.esa.int/documents/33431/35950/1567258130694-ExoMars_LSS_User_Manual_V1_17Dec13.pdf (accessed on 2 February 2021).
- Patel, N.; Slade, R.; Clemmet, J. The ExoMars rover locomotion subsystem. J. Terramech. 2010, 47, 227–242. [Google Scholar] [CrossRef]
- Bauer, R.; Leung, W.; Barfoot, T. Development of a dynamic simulation tool for the ExoMars rover. In Proceedings of the 8th International Symposium on Artificial Intelligence, Robotics and Automation in Space (iSAIRAS), Munich, Germany, 5–9 September 2005. [Google Scholar]
- Genta, G. Introduction to the Mechanics of Space Robots, 1st ed.; Springer: Dordrecht, The Netherlands, 2012; ISBN 978-94-007-1795-4. [Google Scholar]
- Genta, G.; Morello, L. The Automotive Chassis. Volume 2: System Design, 1st ed.; Springer: Dordrecht, The Netherlands, 2009; ISBN 978-1-4020-8673-1. [Google Scholar]
- Corke, P. Robotics, Vision and Control: Fundamental Algorithms in MATLAB, 2nd ed.; Springer: Dordrecht, The Netherlands, 2017; ISBN 978-3-319-54412-0. [Google Scholar]
- Shiller, Z.; Sundar, S. Emergency maneuvers of autonomous vehicles. In Proceedings of the 13th World Congress of IFAC, San Francisco, CA, USA, 30 June–5 July 1996. [Google Scholar]
- Ishigami, G.; Nagatani, K.; Yoshida, K. Slope traversal controls for planetary exploration rover on sandy terrain. J. Field Robot. 2009, 26, 264–286. [Google Scholar] [CrossRef] [Green Version]
- Hwang, Y.K.; Ahuja, N. A potential field approach to path planning. IEEE Trans. Robot. Autom. 1992, 8, 23–32. [Google Scholar] [CrossRef] [Green Version]
- Primbs, J.A.; Nevistic, V.; Doyle, J.C. Nonlinear optimal control: A control Lyapunov function and receding horizon perspective. Asian J. Control 1999, 1, 14–24. [Google Scholar] [CrossRef]
- Tahirovic, A.; Magnani, G. General framework for mobile robot navigation using passivity-based MPC. IEEE Trans. Autom. Control 2011, 56, 184–190. [Google Scholar] [CrossRef]
- Baumgartner, E.T.; Aghazarian, H.; Trebi-Ollennu, A. Rover localization results for the FIDO rover. Sens. Fusion Decentralized Control Robot. Syst. IV 2001, 4571, 34–44. [Google Scholar] [CrossRef]
- Biesiadecki, J.; Maimone, M.; Morrison, J. The Athena SDM Rover: A testbed for Mars rover mobility. In Proceedings of the 6th International Symposium on Artificial Intelligence, Robotics, and Automation in Space (ISAIRAS-01), Montreal, QC, Canada, 18–22 June 2001. [Google Scholar]
- Koenig, N.; Howard, A. Design and use paradigms for Gazebo, an open-source multi-robot simulator. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2149–2154. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter [Unit] | Value |
|---|---|
| m [kg] | 310 |
| [kg | 93.0 |
| [m] | 0.76 |
| [m] | 0.14 |
| [m] | −0.59 |
| [m] | 0.6 |
| [m] | −0.6 |
| L [m] | 1.35 |
| [cm] | 14.25 |
| b [cm] | 12.0 |
| t [m] | 1.2 |
| [kPa] | 14.6 |
| [km/h] | 0.1 |
| [km/h] | 0.04 |
| Parameter [Unit] | c [Pa] | ϕ [deg] | n [-] | kc [N/] | kϕ [N/] | Kx = Ky [M] | ρ [kg/m3] |
|---|---|---|---|---|---|---|---|
| Cloddy soil | 170 | 37° | 1 | 1400 | 820,000 | 0.016 | 1550 |
| Mixed drift-cloddy soil | 220 | 33.1° | 1 | 1400 | 820,000 | 0.016 | 1350 |
| Drift soil | 530 | 26.4° | 1 | 1400 | 820,000 | 0.016 | 1150 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gargiulo, A.M.; di Stefano, I.; Genova, A. Model-Based Slippage Estimation to Enhance Planetary Rover Localization with Wheel Odometry. Appl. Sci. 2021, 11, 5490. https://doi.org/10.3390/app11125490
Gargiulo AM, di Stefano I, Genova A. Model-Based Slippage Estimation to Enhance Planetary Rover Localization with Wheel Odometry. Applied Sciences. 2021; 11(12):5490. https://doi.org/10.3390/app11125490
Chicago/Turabian StyleGargiulo, Anna Maria, Ivan di Stefano, and Antonio Genova. 2021. "Model-Based Slippage Estimation to Enhance Planetary Rover Localization with Wheel Odometry" Applied Sciences 11, no. 12: 5490. https://doi.org/10.3390/app11125490
APA StyleGargiulo, A. M., di Stefano, I., & Genova, A. (2021). Model-Based Slippage Estimation to Enhance Planetary Rover Localization with Wheel Odometry. Applied Sciences, 11(12), 5490. https://doi.org/10.3390/app11125490