
Foot/Ankle Prostheses Design Approach Based on Scientometric and Patentometric Analyses


 , and
, and
Abstract
:1. Introduction
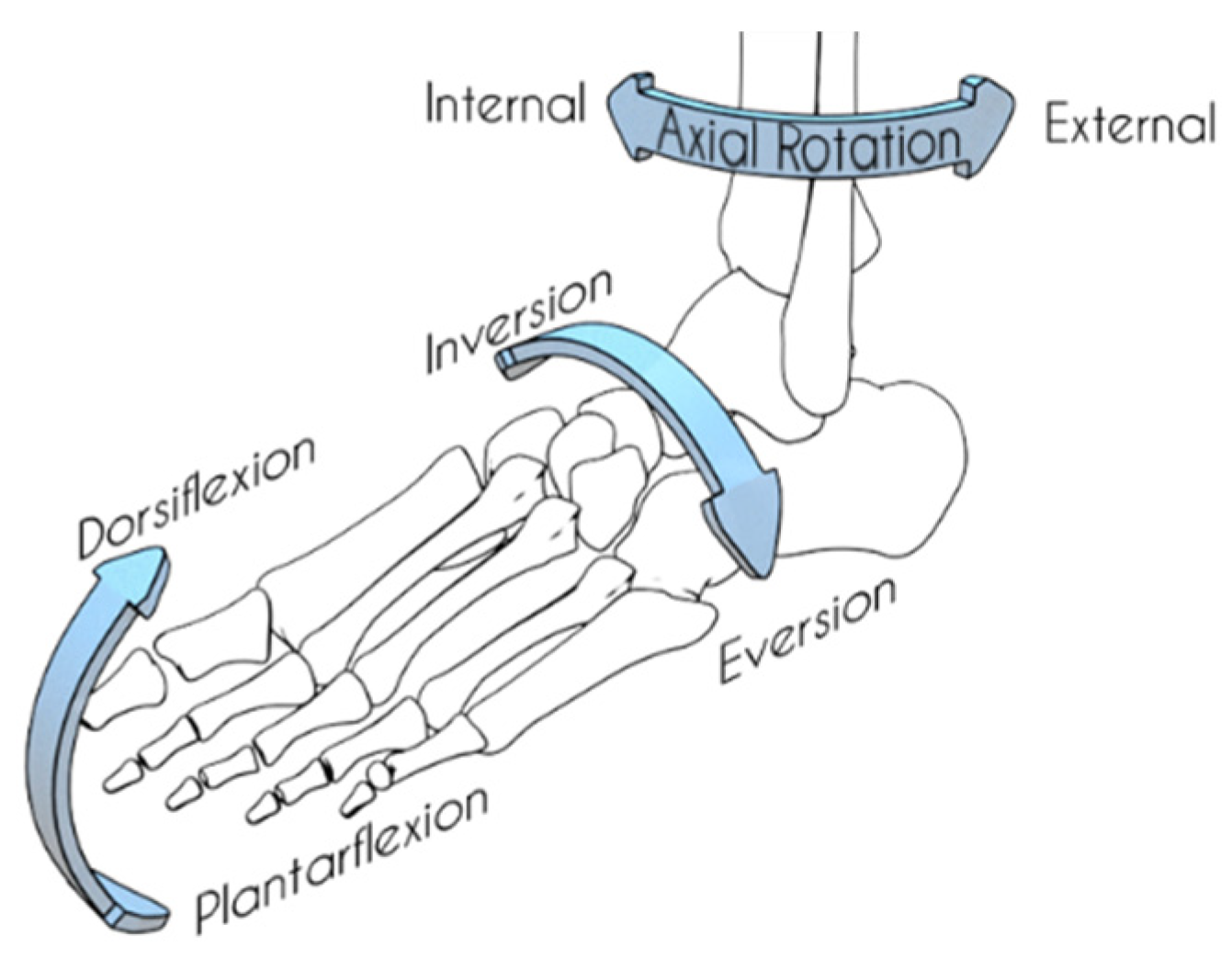
- Ankle-cushion heel (SACH-foot): This was developed in the 1950s and incorporated a compressible heel that dampens the impact on the ground while emulating a plantarflexion movement. This type of prosthesis is used for its relatively low cost and weight [4].
- ESAR, also known as ESR, was developed in the 1980s. This type of prosthesis uses a foot-modeled plate (usually carbon fiber made) that stores elastic potential energy and progressively releases it as kinetic energy [5].
- CESR prostheses aim to capture the energy that is dissipated during a gait impact. On the loading phase of stance, energy is stored by a spring and locked. Then, this energy is timely released during the terminal stance of walking using microelectronic components [5].
- Active prostheses are considered state-of-the-art prostheses due to the use of actuators, microcontrollers, or other electronic devices; usually, these work using ESAR foot systems combined with some external elements such as actuators or other electronic components. These prostheses have better control and stability during a walk cycle [6].
2. Search Method
2.1. Used Keywords
2.2. Patent Search
2.3. Scientific Communications Search
3. Results
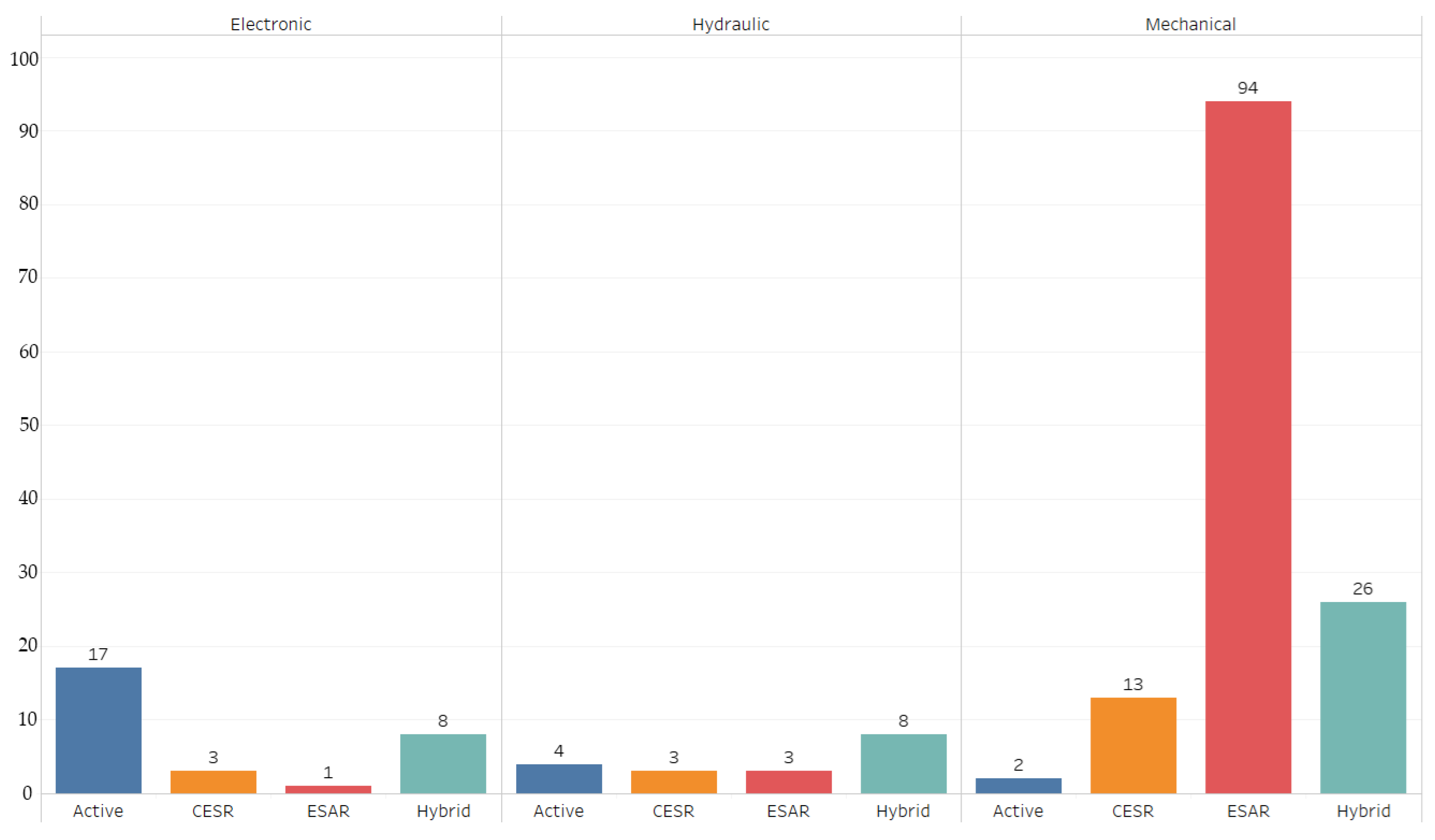
3.1. Patentometric Analysis
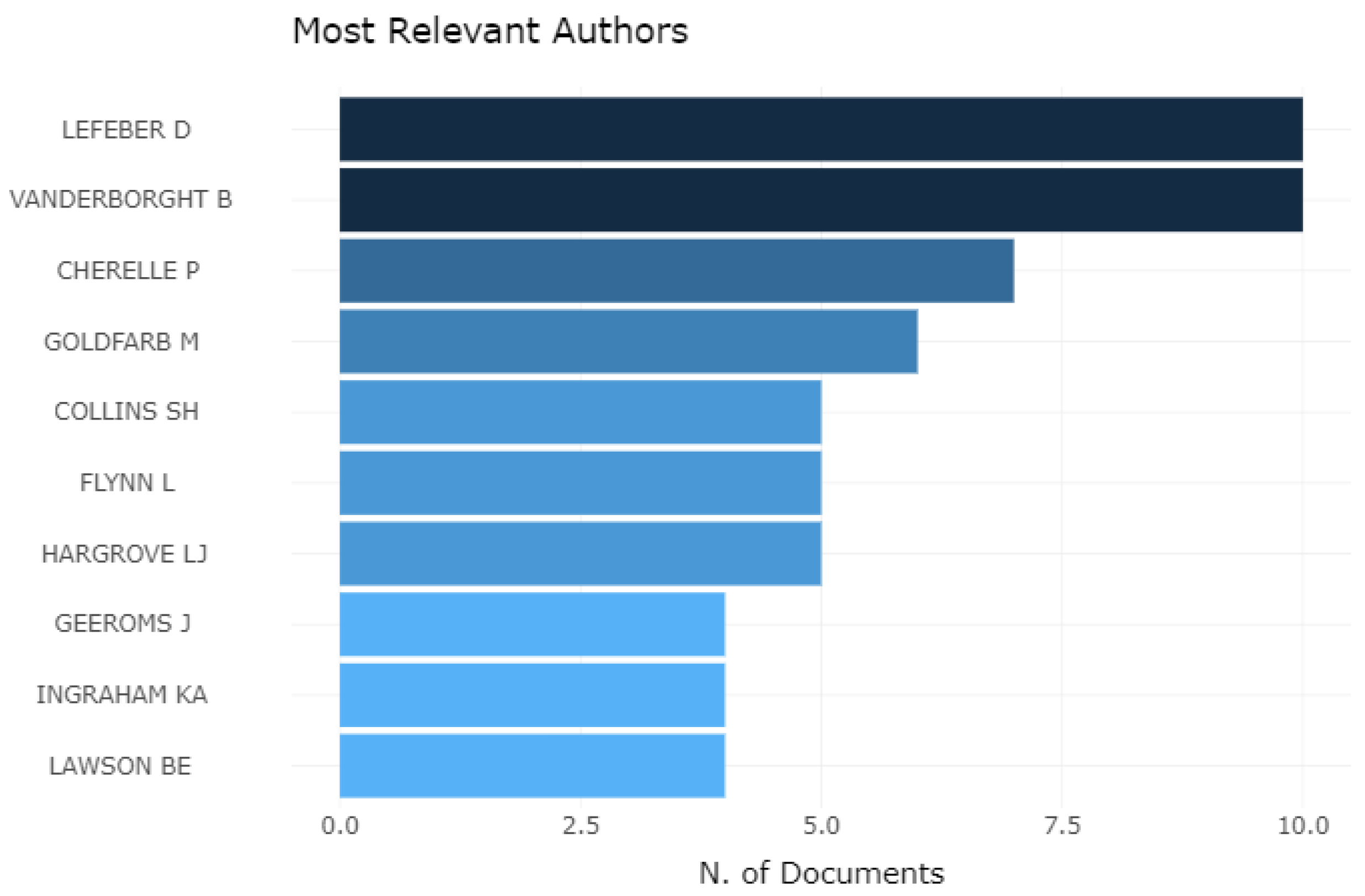
3.2. Scientometric Analysis
4. Discussion
4.1. Device Classification
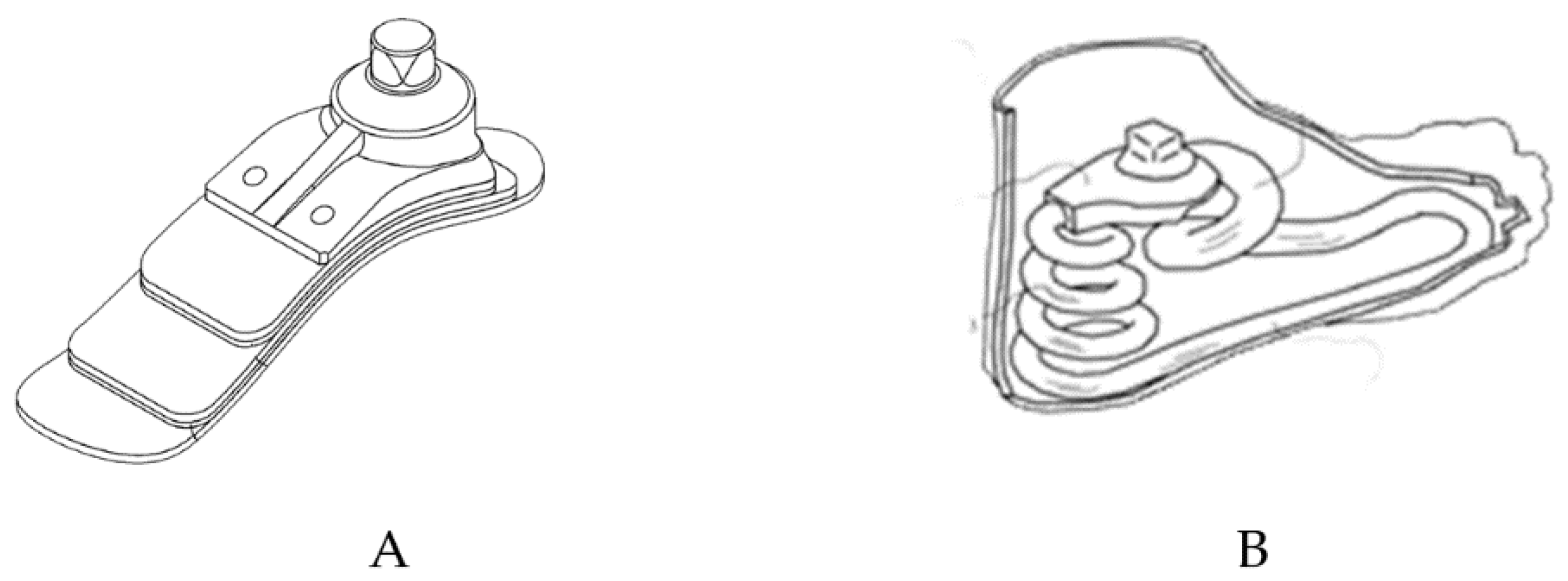
4.2. Other Designs
4.3. ESAR Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Biddiss, E.A.; Chau, T.T. Upper limb prosthesis use and abandonment. Prosthet. Orthot. Int. 2007, 31, 236–257. [Google Scholar] [CrossRef]
- Tudor-Locke, C.; Bassett, D.R. How many steps/day are enough? Sports Med. 2004, 34, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Brosky, J.; Balazsy, J. Functional Anatomy of the Foot and Ankle; Elsevier: Amsterdam, The Netherland, 2017; pp. 581–586. [Google Scholar]
- Geeroms, J. Study and Design of an Actuated Below-Knee Prosthesis. Master’s Thesis, Vrije Universiteit, Brussels, Belgium, June 2011. [Google Scholar]
- Hafner, B.J.; E Sanders, J.; Czerniecki, J.M.; Fergason, J. Transtibial energy-storage-and-return prosthetic devices: A review of energy concepts and a proposed nomenclature. J. Rehabil. Res. Dev. 2002, 39, 1–11. [Google Scholar] [PubMed]
- Gutfleisch, O. Peg legs andbionic limbs: The development of lower extremity prosthetics. Interdiscip. Sci. Rev. 2003, 28, 139–148. [Google Scholar] [CrossRef]
- Blatchford Products Limited. Adjustment Device for a Lower Limb Prosthesis. U.S. Patent US 200893355A, 12 May 2008. [Google Scholar]
- Beijing Gongdao Fengxing Intelligent Tec. Below-Knee Prosthesis Provided with Power Ankle. CN Patent CN201210410211A, 24 October 2012. [Google Scholar]
- Christensen, R.J. Bifurcated, Multi-Purpose Prosthetic Foot. Eur. Patent Appl. EP 2593046 A4, 19 March.
- Hansen Andrew, H. Bi-Modal Ankle-Foot Device. U.S. Patent US 8764850 B2, 1 July 2014. [Google Scholar]
- Herr, H.M. Controlling Power in a Prosthesis or Orthosis Based on Predicted Walking Speed or Surrogate for Same. U.S. Patent US 20170143516, 13 December 2016. [Google Scholar]
- Ossur, H.F. Damping Device for a Prosthesis. U.S. Patent US 2007795138A, 13 May 2014. [Google Scholar]
- Iversen, E.K. Energy Storing Foot Plate. U.S. Patent US 8888864 B2, 17 November 2014. [Google Scholar]
- Hansen, A.H. Further Improvements to Ankle-Foot Prosthesis and Orthosis Capable of Automatic Adaptation to Sloped Walking Surfaces. U.S. Patent US 8696764 B2, 20 January 2012. [Google Scholar]
- Rifkin, J.R. Joints for Prosthetic, Orthotic and/or Robotic Devices. U.S. Patent US 8821589 B2, 11 June 1990. [Google Scholar]
- Jonsson, O.I. Low Profile Prosthetic Foot. U.S. Patent US 8858649 B2, 14 October 2014. [Google Scholar]
- Rubie, E.W. Lower Limb Prosthetic Device with a Wave Spring. U.S. Patent US 8771372 B1, 2 February 2021. [Google Scholar]
- Miller, J.A. Modular Prosthetic Foot. U.S. Patent US 8685108 B2, 3 December 2008. [Google Scholar]
- Otto Bock Holding Gmbh & Co Kg. Orthopedic Foot Part. U.S. Patent US13625942A, 20 May 2014. [Google Scholar]
- Joseph, M. Schimmels. Passive Ankle Prosthesis with Energy Return Simulating That of a Natural Ankle. U.S. Patent US 8721737 B2, 13 May 2014. [Google Scholar]
- Otto Bock Healthcare Gmbh. Passive Orthopedic Aid in the Form of a Foot Prosthesis or Foot Orthosis. U.S. Patent CA2652727, 7 August 2009.
- Beijing Gongdao Fengxing Intelligent Tec. Power Below-Knee Prosthesis with Discrete Soft Toe Joints. CN Patent CN201210410878A, 17 December 2014.
- Universiteit Gent. Prosthetic Ankle-Foot System. International Patent WO2013EP71271A, 17 April 2014.
- Phillips, V.L. Prosthetic Energy Storing and Releasing Apparatus and Methods. U.S. Patent US 2014/0243998 A1, 17 January 2017. [Google Scholar]
- Smith, K.B. Prosthetic Foot. U.S. Patent US20140156027, 5 June 2014. [Google Scholar]
- Taszreak, T. Prosthetics Using Curved Dampening Cylinders. U.S. Patent US20140249652, 6 January 2015. [Google Scholar]
- Duger, M. A Foot with a Vacuum Unit Activated by An Ankle Motion. Eur. Patent Appl. EP 2943166 A1, 18 November 2015. [Google Scholar]
- Falz & Kannenberg Gmbh & Co. Kg. Artificial Ankle, Artificial Foot and Artificial Leg. U.S. Patent US13979249A, 8 December 2015. [Google Scholar]
- Univ Bharath. Artificial Limb Prosthesis Leg below Knee & Above Knee. International Patent IN2014CH784A, 13 March 2015.
- Brown, C.A. Flexible Prosthetic Appliance. U.S. Patent US20150297365A1, 22 October 2015. [Google Scholar]
- Sanders, M.R. Foot for Mobility Device. U.S. Patent US 2015/0142134 A1, 21 May 2015. [Google Scholar]
- Rubie, E.W. High-Performance Multi-Component Prosthetic Foot. U.S. Patent US 9011554 B2, 20 April 2015. [Google Scholar]
- Gyeonggyeongcheol. Hydraulic Actuating Unit and Artificial Foot Prosthesis System Having the Same. KR Patent KR101621610B1, 17 May 2016.
- Bonnet, X. Hydraulic System for a Knee-ankle Assembly Controlled by a Microprocessor. WOUS[M63], 30 January 2014. [Google Scholar]
- Officine Ortopediche Rizzoli Srl. Prosthesis Structure for Lower-Limb Amputees. Eur. Patent Appl. EP2010836830A, 26 August 2015. [Google Scholar]
- Ability Dynamics Llc. Prosthetic Foot. U.S. Patent US13642501A, 14 July 2015.
- Frizen, D. Prosthetic Foot. RURU[M64], 10 May 2015. [Google Scholar]
- Frizen, D. Prosthetic Foot. RU 2550003, 10 May 2015. [Google Scholar]
- Luder Mosler. Prosthetic Foot. U.S. Patent US20150305894, 22 May.
- The Ohio Willow Wood Company. Prosthetic Foot. U.S. Patent US14556755A, 26 March 2015. [Google Scholar]
- Jonsson Vilhjalmur Freyr. Prosthetic Foot with a Curved Split. Eur. Patent Appl. EP 2538891, 15 April 2015. [Google Scholar]
- Lecomte, C.G. Prosthetic Foot with Dual Foot Blades and Vertically Offset Toe. U.S. Patent US 9017421, 28 April 2015. [Google Scholar]
- Christensen Roland, J. Prosthetic Foot With Floating Forefoot Keel. EP 2588040 A4. EP, 29 July 2015. [Google Scholar]
- 3d Systems. Prosthetic Limb. KR 101478868 B1, 2 January 2015. [Google Scholar]
- Hawkins, R. Prosthetic System. U.S. Patent US14791982A, 29 October 2015. [Google Scholar]
- Clausen Arinbjorn Viggo. Smooth Rollover Insole For Prosthetic Foot. U.S. Patent US 9168158 B2, 27 October 2015. [Google Scholar]
- Mo, R. System for Powered Ankle-Foot Prosthesis with Active Control of Dorsiflexion-Plantarflexion and Inversion-Eversion. U.S. Patent US20150265425, 26 December 2017. [Google Scholar]
- Goldfarb, M. Walking Controller for Powered Ankle Prostheses. U.S. Patent US20150297364, 22 October 2015. [Google Scholar]
- Bedard, S. Actuated Prosthesis for Amputees. U.S. Patent US 9358137 B2, 7 June 2016. [Google Scholar]
- Colvin, J.M. Additive Manufacturing Produced Prosthetic Foot. WO2014145266, 18 September 2014. [Google Scholar]
- Ermalyuk, V. Ankle Prosthesis Assembly. RU0002596289, 10 September 2016. [Google Scholar]
- Suslov, A. Ankle Prosthesis Assembly of Foot. RU0002587956, 27 June 2016. [Google Scholar]
- Inha Industry Partnership Institute. Artificial Foot. KR2014113135A, 12 July 2016. [Google Scholar]
- Woong, S.J. Artificial Foot for Sports. KR101691473BKR, 30 December 2016. [Google Scholar]
- Sogang University. Artificial Foot Prosthesis System. KR201470575A, 17 May 2016. [Google Scholar]
- Massachusetts Institute of Technology. Artificial Human Limbs and Joints Employing Actuators, Springs, and Variable-damper Elements. U.S. Patent US15098725A, 11 August 2016. [Google Scholar]
- Klute, G. Controlled Coronal Stiffness Prosthetic Ankle. U.S. Patent US 2016/0151175, 2 June 2016. [Google Scholar]
- Beijing Baimtec Material Co Ltd. False Foot of Carbon -fibre Composite. CN201520753246U, 24 February 2016.
- Medi Gmbh & Co, Kg. Foot Prosthesis. EP 2420212 B1, 2 March 2016. [Google Scholar]
- Mccarvill, S. Foot Prosthesis with Adjustable Rollover. EP 1788987 B1, 6 July 2016. [Google Scholar]
- Hyun, J. Hybrid Ankle Joints. KR20160138604A, 6 December 2016. [Google Scholar]
- Victhom Human Bionics Inc. Instrumented Prosthetic Foot. U.S. Patent US13354188A, 24 March 2015.
- Gonzalez, R.V. Layering Technique for An Adjustable, Repairable Variable Stiffness Prosthetic Foot. WO 2016/022699, 11 February 2016. [Google Scholar]
- Mosler. Passive Orthopaedic Aid in The Form of a Foot Prosthetic or Orthotic. CN101569568, 9 April 2014. [Google Scholar]
- Ásgeirsson Sigurõur. Prosthetic Ankle Module. WO2013043736, 28 March 2013. [Google Scholar]
- Nijman, J. Prosthetic Ankle Module. U.S. Patent US 9439786, 13 September 2016. [Google Scholar]
- Arinbjorn, C. Prosthetic Ankle: A Method of Controlling Based on Adaptation to Speed. U.S. Patent US20170304083, 30 June 2020. [Google Scholar]
- Holgate, M.A. Prosthetic Device and Method with Compliant Linking Member and Actuating Linking Member. U.S. Patent US20160242938, 28 January 2020. [Google Scholar]
- Ability Dynamics Llc. Prosthetic Foot. AU2015214156, 11 August 2016. [Google Scholar]
- Ability Dynamics Llc. Prosthetic Foot. CA2965997, 21 July 2016. [Google Scholar]
- Doddroe, J.L. Prosthetic Foot. US 9351853 BUS, 31 May 2016. [Google Scholar]
- Starker, F. Prosthetic Foot. EP 3052058 AEP, 10 August 2016. [Google Scholar]
- Sulprizio, M.S. Prosthetic Foot. EP 1663082 BEP, 27 April 2016. [Google Scholar]
- Kim, S.Y. Prosthetic Foot and Manufacturing Method Thereof. KR1020160127875, 5 December 2016. [Google Scholar]
- Ossur, H. Prosthetic Vacuum System. U.S. Patent US2006640150A, 16 February 2016. [Google Scholar]
- Howell. Responsive Prosthesis. WO2016089790, 9 June 2016. [Google Scholar]
- Vrije Universiteit Brussel. A Prosthesis or Orthosis Comprising A Hinge Joint System For Functionally Assisting, Enhancing And/or Replacing a Hinge Joint of A Human or Animal Subject. U.S. Patent US15327277A, 15 June 2017. [Google Scholar]
- Sogang University. Active Lower Leg Prosthesis Device. KR201542990A, 8 May 2017. [Google Scholar]
- Rubie, E.W. Apparatus and Method for A Split Toe Blade. U.S. Patent US 2017/0281372 A1, 2017. [Google Scholar]
- Nanjing Institute of Technology. Artificial Ankle Joint Limb Based on Flexible Driver. CN201710468178A, 17 November 2017. [Google Scholar]
- Hornos, P. Artificial Foot. EP 2938298 BEP, 7 November 2017. [Google Scholar]
- Otto Bock Holding Gmbh & Co, Kg. Artificial Foot and Method For Controlling The Movement Thereof. U.S. Patent US14611976A, 7 November 2017. [Google Scholar]
- Lin, Y. Bow-shaped Ankle Structure Combined Material Artificial Limb Foot Core. CN206342567, 21 July 2017. [Google Scholar]
- Rouse Elliott, J. Catapult Ankle and Related Methods. U.S. Patent US 2017/0105851, 20 April 2017. [Google Scholar]
- Millinav. Dispositif De Prothese De Cheville Controle Par Une Prothese De Genou Motorisee Sensible A La Pesanteur. FR2016886A, 1 December 2017. [Google Scholar]
- Martin, J.J. Electronically Controlled Prosthetic System. U.S. Patent US15092231A, 3 October 2017. [Google Scholar]
- Sun, Y. Fine Energy Storage Foot of Carbon. CN206080773, 12 April 2017. [Google Scholar]
- Kranner, W. Foot Prosthesis. U.S. Patent US 9844450 B2, 19 December 2017. [Google Scholar]
- Lecomte, C.G. Foot Prosthesis with Resilient Multi-axial Ankle. U.S. Patent US 9668887 B2, 6 June 2017. [Google Scholar]
- Palmer, M. Microprocessor Controlled Prosthetic Ankle System for Footwear And Terrain Adaptation. EP 2842522 B1, 5 April 2017. [Google Scholar]
- Guangzhou Kangmeite Prostheses Co Ltd. Novel Fine Prosthetic Foot of Comfortable Energy Storage Carbon. CN201621018836U, 5 September 2017. [Google Scholar]
- Ken Dall Enterprise Co. Ltd. Oil Pressure Ankle Joint. CN201610388330A, 12 December 2017. [Google Scholar]
- Lecomte, C.G. Overmould Attachments for Prosthetic Foot. EP2956094 B1, 11 October 2017. [Google Scholar]
- Ossur, H. Prosthetic Ankle and Method of Controlling Same Based on Adaptation to Speed. U.S. Patent US15648988A, 26 October 2017. [Google Scholar]
- Smith, K.B. Prosthetic Foot. AU 2016/206637 A1, 18 May 2017. [Google Scholar]
- Otto Bock Holding Gmbh & Co. Kg. Prosthetic Foot. U.S. Patent US15305633A, 23 February 2017. [Google Scholar]
- Sun, Y. Prosthetic Foot. CN206080774, 12 April 2017. [Google Scholar]
- Cheng, Y.T. Prosthetic Foot Structure. TW I565456 B, 11 January 2017. [Google Scholar]
- Christensen, R.J. Prosthetic Foot with Energy Transfer Medium Including Variable Viscosity Fluid. EP 1487378 B1, 18 January 2017. [Google Scholar]
- Hermann, M. Prosthetic Foot, System of a Prosthetic Foot and A Shoe, and Method for Adapting the Heel Height of a Prosthetic Foot. RU0002686292, 24 April 2019. [Google Scholar]
- Lincoln, L.S. Prosthetic Joint with Mechanical Response System to Position and Rate of Change. CN107205831, 26 September 2017. [Google Scholar]
- Arinbjorn, V.C. Prosthetic Sport Feet. EP 3099273 AEP, 18 October 2017. [Google Scholar]
- Li, J. Shock Attenuation Energy -absorbing Prosthetic Foot Foot Core. CN206342567, 21 July 2017. [Google Scholar]
- Wang, X. Single-freedom-degree Active Type Ankle Joint Artificial Limb Based on Closed Type Hydraulic Driving System. CN107397615A, 20 February 2019. [Google Scholar]
- Vanderbilt University. Systems And Control Methodologies for Improving Stability in Powered Lower Limb Devices. US13508175A, 5 September 2017. [Google Scholar]
- Arizona Board of Regents Acting for and on Behalf of Northern Arizona University. Actuator Control System and Related Methods. U.S. Patent US14880118A, 18 December 2018. [Google Scholar]
- Nan, Y. Yan Nan. Ankle-foot Prosthesis Device. CN107874875, 6 April 2018. [Google Scholar]
- Morales, M.; Heli, M. Articulated Orthopaedic Foot with Shock Absorption, Which Prevents the Impact Produced in Each Foot-loading Cycle When Walking or Running, Providing Natural Movement and Stability for the User. WO 2018/163050 A4, 15 November 2018. [Google Scholar]
- Lindhe, C. Artificial Foot. U.S. Patent US 2018/0263792 A4, 15 November 2018. [Google Scholar]
- Rouse, E.J. Biomimetic and Variable Stiffness Ankle System and Related Methods. U.S. Patent US 2018/0092761 A1, 5 April 2018. [Google Scholar]
- Xing, Z. Bionic Prosthetic Mechanical Foot with Parallel Joints. CN108714065, 30 October 2018. [Google Scholar]
- Palmer, J.R. Clearance Enhancer for Lower Limb Prosthesis. U.S. Patent US 10123886 B2, 12 November 2018. [Google Scholar]
- Bonawei Rehabilitation Equip Xiamen Co. Energy Storage Foot. CN201720513686U, 26 June 2018. [Google Scholar]
- Otto Bock Holding Gmbh & Co Kg. Foot Prosthesis. US15570232A, 10 May 2018. [Google Scholar]
- Kaltenborn, S. Foot Prosthesis. US20180125679, 1 September 2020. [Google Scholar]
- Penot, B. Foot Prosthesis Has Blade. FR3063887AFR, 21 September 2018. [Google Scholar]
- Habecker, M.J. Foot Prosthesis with Dymic Variable Keel Resistance. U.S. Patent US20180256368AUS, 29 December 2021. [Google Scholar]
- Habecker, M.J. Foot Prosthesis with Dynamic Variable Keel Resistance. US2018256368, 13 September 2018. [Google Scholar]
- Cheng, C. Hydraulic Ankle. DE102016125081BDE, 30 May 2018. [Google Scholar]
- Dall, K.; Enterprise Co. Ltd. Hydraulic Ankle Joint. U.S. Patent US15391785A, 24 July 2018. [Google Scholar]
- Boiten, H. Jointless Prosthetic Foot. EP EP 3142612 B1, 18 April 2018. [Google Scholar]
- Ye, Y. Light Intelligent Energy-storage Energy-releasing Ankle Prosthesis. CN CN107536662, 5 January 2018. [Google Scholar]
- Bartlett, B. Limb Prosthesis System and Method. U.S. Patent US 9895239 B2, 20 February 2018. [Google Scholar]
- Goldfarb, M. Linear Actuator for Asymmetric Power Generation and Dissipation. WO WO 2018/132806 A1, 19 July 2018. [Google Scholar]
- Graham, H. Lower Limb Prosthesis Comprising a Hydraulic Damping and A Vacuum Generating Mechanism. US20180036149, 8 February 2018. [Google Scholar]
- Maitland, M.E. Medial-lateral Stabilizing Prosthetic Ankle/foot For Angled and Rough Ground Gait. U.S. Patent US 9949849 B2, 24 April 2018. [Google Scholar]
- Clausen, A.V. Method for Operating a Prosthetic Ankle. EP2007752020A, 25 April 2018. [Google Scholar]
- Fairley, J. Modular Lower Limb Prosthesis System. U.S. Patent US 2018/0289511 A1, 11 October 2018. [Google Scholar]
- Endo, K. Movement Support Apparatus. EP 2823792 B1, 21 March 2018. [Google Scholar]
- Lenzi, T. Polycentric Powered Ankle Prosthesis. WO 2017/222623, 8 February 2018. [Google Scholar]
- Huang, Q. Powered Artificial Ankle Based on Electro-hydraulic Direct Drive Technology. CN20181031, 4 September 2018. [Google Scholar]
- Gudmundsson, I. Prosthetic and Orthotic Devices Having Magnetorheological Elastomer Spring with Controllable Stiffness. EP 2753270 B1, 24 October 2018. [Google Scholar]
- Moser, D. Prosthetic Ankle and Foot Combination. US 9132023 B2, 15 September 2015. [Google Scholar]
- Fillauer Euro Ab. Prosthetic Device. U.S. Patent US15690780A, 1 March 2018. [Google Scholar]
- Ramirez, C. Prosthetic Device. EP 3290006 A1, 7 March 2018. [Google Scholar]
- Bonacini, D. Prosthetic Foot. U.S. Patent US 2018/0116825, 3 May 2018. [Google Scholar]
- Smith, K. Prosthetic Foot. WO2016115395, 21 July 2016. [Google Scholar]
- Willowwood Global Llc. Prosthetic Foot. U.S. Patent US14989833A, 6 March 2018. [Google Scholar]
- Zamora, D.A. Prosthetic Foot. EP 2560584 B1, 21 November 2018. [Google Scholar]
- Gunnarssonn, R.O. Prosthetic Foot with Hybrid Layup. U.S. Patent US 9907676 B2, 6 March 2018. [Google Scholar]
- Kramer, L.D. Prosthetic Foot with Modular Construction. U.S. Patent US 2018/0098863, 12 April 2018. [Google Scholar]
- Zhang, J. Shank Prosthesis Provided with Double Foot Sole Plates. CN107647949, 2 February 2018. [Google Scholar]
- Prost, V. Spring Design for Prosthetic Applications. WO 2018/208714 A1, 15 November 2018. [Google Scholar]
- Vanderbilt University. Stair Ascent and Descent Control for Powered Lower Limb Devices. EP2013713653A, 18 July 2018. [Google Scholar]
- Jonsson, O.I. Tapered Flex Plate for Prosthetic Foot. US 2018/0296370 A1, 18 October 2018. [Google Scholar]
- Univ Northwestern Polytechnical. Variable Bar Length Gear Five-bar Mechanism Active and Passive Ankle Artificial Limb. CN201810475980A, 20 November 2018. [Google Scholar]
- Sandahl, D. Variable Stiffness Prosthetic Foot. U.S. Patent US 10034782 B2, 31 July 2018. [Google Scholar]
- Smith, J.R. Adjustable Stiffness Prosthetic Foot. U.S. Patent US 2019/0015224 A1, 17 January 2019. [Google Scholar]
- Hansen, A.H. Ankle-foot Prosthesis for Automatic Adaptation to Sloped Walking Surfaces. US20190254844, 22 August 2019. [Google Scholar]
- Massachusetts Institute of Technology. Artificial Ankle-foot System with Spring, Variable-damping, And Series-elastic Actuator Components. U.S. Patent US14283323A, 17 May 2016. [Google Scholar]
- Schlafly, M.K. Biomimetic Prosthetic Device. U.S. Patent US 10292840 B2, 21 May 2019. [Google Scholar]
- Nelson, R.H. Carbon Fiber Prosthetic Foot. U.S. Patent US 2019/0142610 A1, 16 May 2019. [Google Scholar]
- Gene, P. Compression Heel Prosthetic Foot. U.S. Patent US 2019/0192314 A1, 27 June 2019. [Google Scholar]
- Pusch, M. Foot Prosthesis. RU 2688715 C2, 22 May 2019. [Google Scholar]
- Wang, Z. Hydraulic Pressure Energy Storage Prosthetic Foot. CN208447864, 1 February 2019. [Google Scholar]
- Poulson, A.I. Hydraulic Prosthetic Ankle. EP 3272316 B1, 31 March 2019. [Google Scholar]
- Wang, J. Low-energy Artificial Limb. CN109758277, 17 May 2019. [Google Scholar]
- Blatchford Products Limited. Lower Limb Prosthesis. U.S. Patent US14416509A, 7 August 2018. [Google Scholar]
- Amiot, D. Passive and Slope Adaptable Prosthetic Foot Ankle. WO 2019/028388, 7 February 2019. [Google Scholar]
- Hugh, M. Powered Ankle-foot Prosthesis. US20190175365, 13 June 2019. [Google Scholar]
- Allermann, R. Prosthesis and Prosthetic Foot Adapter. WO 2019/007678 A1, 10 January 2019. [Google Scholar]
- Moser, D. Prosthetic Ankle Joint Mechanism. U.S. Patent US 9999526 B2, 19 June 2018. [Google Scholar]
- Adamczyk, P.G. Prosthetic Apparatus and Method Therefor. US20190046335, 14 February 2019. [Google Scholar]
- Albertson, A.K. Prosthetic Feet Having Heel Height Adjustability. WO2018102609, 7 June 2018. [Google Scholar]
- Friesen, J. Prosthetic Foot. EP 3139871 B1, 17 July 2019. [Google Scholar]
- Grosskopf, S. Prosthetic Foot. CA 2975364 C, 30 April 2019. [Google Scholar]
- Guangdong Lanwan Intelligent Technology. Prosthetic Foot. CN201811171590A, 15 January 2019. [Google Scholar]
- Jo, S.H. Prosthetic Foot. WO2019117389, 20 June 2019. [Google Scholar]
- Pusch, M. Prosthetic Foot. US2019070022, 7 March 2019. [Google Scholar]
- Kim, H.C. Prosthetic Foot Having a Function of Ancle. KR 2019002, 11 March 2019. [Google Scholar]
- Mosler, L. Prosthetic Foot Insert and Prosthetic Foot. U.S. Patent US 10299942 B2, 28 May 2019. [Google Scholar]
- Kim, H.C. Prosthetic Foot That Toe Part Can Rotatate. KR20190025152, 3 November 2019. [Google Scholar]
- Clausen, A.V. Prosthetic Foot with Enhanced Stability and Elastic Energy Return. US20190224026, 25 July 2019. [Google Scholar]
- Clausen, A.V. Prosthetic Foot with Removable Flexible Members. EP 3128958 BEP, 7 August 2019. [Google Scholar]
- Day Jesse. Prosthetic Foot with Spaced Spring Elements. U.S. Patent US 2019/0125552 A1, 2 May 2019. [Google Scholar]
- Radspieler Andreas. Prosthetic Foot, And Prosthesis for A Lower Extremity. US 2019/0231561 A1, 1 August 2019. [Google Scholar]
- Blatchford Products Limited. A Prosthetic Ankle and Foot Combination. EP 3427701 B1, 19 February 2020. [Google Scholar]
- Pm Ingenierie Et Design. Foot Prosthesis Comprising a Damping Element. WO2018166905, 20 September 2018. [Google Scholar]
- Blatchford Products Limited. Lower Limb Prosthesis. WO2012104591, 9 August 2012. [Google Scholar]
- Klopf, J. Oberschenkelprothesenpassteil. DE102018112724, 29 August 2019. [Google Scholar]
- Université Catholique De Louvain. Prosthesis Or Orthosis. WO2020039063, 27 February 2020. [Google Scholar]
- Hein, E. Prosthetic Ankle Assembly and Ankle-foot System Comprising Same. WO2019245981, 26 December 2019. [Google Scholar]
- Haun, D.G. Prosthetic External Fixation Assembly for Post-amputee Ambulation. US20180303635, 26 November 2019. [Google Scholar]
- Comité International De La Croix-rouge (cicr). Prosthetic Foot. WO2020012319, 16 January 2020. [Google Scholar]
- Xiborg Inc. Prosthetic Foot and Connector for Prosthetic Foot. WO2020044519, 5 March 2020. [Google Scholar]
- Instituto Tecnológico José Mario Molina Pasquel Y Henriquez. Prótesis Mecánica De Pie. WO2019194671, 10 October 2019. [Google Scholar]
- Gosakan, H.S. Pyramidal Prosthetic Foot. WO2020012504, 16 January 2020. [Google Scholar]
- Mcnicholas, S.K. Single Axis Ankle-foot Prosthesis with Mechanically Adjustable Range of Motion. WO2019241654, 19 December 2019. [Google Scholar]
- Huang, S.; Wensman, J.P.; Ferris, D. An experimental powered lower limb prosthesis using proportional myoelectric control. J. Med Devices 2014, 8, 024501. [Google Scholar] [CrossRef]
- Sun, J.; Fritz, J.M.; Del Toro, D.R.; Voglewede, P.A. Amputee subject testing protocol, results, and analysis of a powered transtibial prosthetic device. J. Med Devices 2014, 8, 041007–410076. [Google Scholar] [CrossRef]
- Wezenberg, D.; Cutti, A.G.; Bruno, A.; Houdijk, H. Differentiation between solid-ankle cushioned heel and energy storage and return prosthetic foot based on step-to-step transition cost. J. Rehabil. Res. Dev. 2014, 51, 1579–1590. [Google Scholar] [CrossRef]
- Nickel, E.; Sensinger, J.; Hansen, A. Passive prosthetic ankle-foot mechanism for automatic adaptation to sloped surfaces. J. Rehabil. Res. Dev. 2014, 51, 803–814. [Google Scholar] [CrossRef]
- Mulder, I.A.; Holtslag, H.R.; Beersma, L.F.A.; Koopman, B.F.J.M. Keep moving forward: A new energy returning prosthetic device with low installation height after Syme or Pirogoff amputation. Prosthet. Orthot. Int. 2014, 38, 12–20. [Google Scholar] [CrossRef]
- Safaeepour, Z.; Esteki, A.; Ghomshe, F.T.; E Mousavai, M. Design and development of a novel viscoelastic ankle-foot prosthesis based on the human ankle biomechanics. Prosthet. Orthot. Int. 2014, 38, 400–404. [Google Scholar] [CrossRef] [Green Version]
- Safaeepour, Z.; Esteki, A.; Ghomshe, F.T.; Abu Osman, N.A. Quantitative analysis of human ankle characteristics at different gait phases and speeds for utilizing in ankle-foot prosthetic design. Biomed. Eng. Online 2014, 13, 19. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Wang, Q.; Wang, L. On the design of a powered transtibial prosthesis with stiffness adaptable ankle and toe joints. IEEE Trans. Ind. Electron. 2013, 61, 4797–4807. [Google Scholar] [CrossRef]
- Ko, C.-Y.; Kim, S.-B.; Kim, J.K.; Chang, Y.; Kim, S.; Ryu, J.; Mun, M. Comparison of ankle angle adaptations of prosthetic feet with and without adaptive ankle angle during level ground, ramp, and stair ambulations of a transtibial amputee: A pilot study. Int. J. Precis. Eng. Manuf. 2014, 15, 2689–2693. [Google Scholar] [CrossRef]
- Ko, C.-Y.; Kim, S.-B.; Chang, Y.; Cho, H.; Ryu, J.; Mun, M. Biomechanical features of level walking by transtibial amputees wearing prosthetic feet with and without adaptive ankles. J. Mech. Sci. Technol. 2016, 30, 2907–2914. [Google Scholar] [CrossRef]
- Cherelle, P.; Junius, K.; Grosu, V.; Cuypers, H.; VanderBorght, B.; Lefeber, D. The AMP-Foot 2.1: Actuator design, control and experiments with an amputee. Robotica 2014, 32, 1347–1361. [Google Scholar] [CrossRef]
- Cherelle, P.; Grosu, V.; Flynn, L.; Junius, K.; Moltedo, M.; Vanderborght, B.; Lefeber, D. The Ankle Mimicking Prosthetic Foot 3—Locking mechanisms, actuator design, control and experiments with an amputee. Robot. Auton. Syst. 2017, 91, 327–336. [Google Scholar] [CrossRef]
- Simon, A.M.; Ingraham, K.A.; Fey, N.P.; Finucane, S.B.; Lipschutz, R.D.; Young, A.J.; Hargrove, L.J. Configuring a powered knee and ankle prosthesis for transfemoral amputees within five specific ambulation modes. PLoS ONE 2014, 9, e99387. [Google Scholar] [CrossRef]
- Simon, A.M.; Fey, N.P.; Ingraham, K.A.; Finucane, S.B.; Halsne, E.G.; Hargrove, L.J. Improved weight-bearing symmetry for transfemoral amputees during standing up and sitting down with a powered knee-ankle prosthesis. Arch. Phys. Med. Rehabil. 2016, 97, 1100–1106. [Google Scholar] [CrossRef] [PubMed]
- Simon, A.M.; Ingraham, K.A.; Spanias, J.A.; Young, A.J.; Finucane, S.B.; Halsne, E.G.; Hargrove, L.J. Delaying ambulation mode transition decisions improves accuracy of a flexible control system for powered knee-ankle prosthesis. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 1164–1171. [Google Scholar] [CrossRef]
- Caputo, J.M.; Collins, S.H. A universal ankle–foot prosthesis emulator for human locomotion experiments. J. Biomech. Eng. 2014, 136, 035002. [Google Scholar] [CrossRef] [Green Version]
- Asencio, J.-G.; Leonardi, C.; Schved, J.-F.; Di Schino, M. Critical study and medium term results of 40 ankle prostheses in 27 patients with hemophilia. Haemophilia 2015, 21, E536. [Google Scholar]
- Bonnet, X.; Adde, J.N.; Blanchard, F.; Gedouin-Toquet, A.; Eveno, D. Evaluation of a new geriatric foot versus the Solid Ankle Cushion Heel foot for low-activity amputees. Prosthet. Orthot. Int. 2015, 39, 112–118. [Google Scholar] [CrossRef] [PubMed]
- Fairhurst, S.R.; Lin, X.; Nickel, E.A.; Hansen, A.H.; Ferguson, J.E. Sensor based control of a bimodal ankle–foot prosthesis with a smart phone interface. J. Med Devices 2015, 9, 030907. [Google Scholar] [CrossRef]
- Realmuto, J.; Klute, G.K.; Devasia, S. Nonlinear passive cam-based springs for powered ankle prostheses. J. Med Devices 2015, 9, 011007. [Google Scholar] [CrossRef]
- Hessel, A.L.; Tahir, U.; Petak, J.L.; Lemoyne, R.C.; Tester, J.; Nishikawa, K.C. A powered ankle-foot prosthesis with a neuromuscular based control algorithm can successfully mimic human walking. Integr. Comp. Biol. 2015, 55, E274. [Google Scholar]
- Rouse, E.J.; Villagaray-Carski, N.C.; Emerson, R.W.; Herr, H.M. Design and testing of a bionic dancing prosthesis. PLoS ONE 2015, 10, e0135148. [Google Scholar] [CrossRef] [Green Version]
- Flynn, L.; Geeroms, J.; Fabian, R.J.; VanderBorght, B.; Vitiello, N.; Lefeber, D. Ankle–knee prosthesis with active ankle and energy transfer: Development of the CYBERLEGs Alpha-Prosthesis. Robot. Auton. Syst. 2015, 73, 4–15. [Google Scholar] [CrossRef]
- Ficanha, E.M.; Ribeiro, G.A.; Dallali, H.; Rastgaar, M. Design and preliminary evaluation of a two DOFs cable-driven ankle–foot prosthesis with active dorsiflexion–plantarflexion and inversion–eversion. Front. Bioeng. Biotechnol. 2016, 4, 36. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rice, J.J.; Schimmels, J.M.; Huang, S. Design and evaluation of a passive ankle prosthesis with powered push-off. J. Mech. Robot. 2015, 8, 021012. [Google Scholar] [CrossRef]
- Rice, J.J.; Schimmels, J.M. Evaluation of a two degree of freedom passive ankle prosthesis with powered push-off. J. Med. Devices 2015, 9, 030915. [Google Scholar] [CrossRef]
- Jimenez-Fabian, R.; Geeroms, J.; Flynn, L.; Vanderborght, B.; Lefeber, D. Reduction of the torque requirements of an active ankle prosthesis using a parallel spring. Robot. Auton. Syst. 2017, 92, 187–196. [Google Scholar] [CrossRef]
- Shultz, A.H.; Lawson, B.E.; Goldfarb, M. Running with a powered knee and ankle prosthesis. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 403–412. [Google Scholar] [CrossRef]
- Shultz, A.H.; Lawson, B.E.; Goldfarb, M. Variable cadence walking and ground adaptive standing with a powered ankle prosthesis. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 495–505. [Google Scholar] [CrossRef] [PubMed]
- Shultz, A.H.; Goldfarb, M. A unified controller for walking on even and uneven terrain with a powered ankle pros-thesis. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 788–797. [Google Scholar] [CrossRef] [PubMed]
- Kim, M.; Collins, S.H. Once-per-step control of ankle-foot prosthesis push-off work reduces effort associated with balance during walking. J. Neuroeng. Rehabil. 2015, 12, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Collins, S.H.; Kim, M.; Chen, T.; Chen, T. An ankle-foot prosthesis emulator with control of plantarflexion and inver-sion-eversion torque. IEEE Trans. Robot. 2018, 34, 1183–1194. [Google Scholar]
- Ingraham, K.A.; Fey, N.P.; Simon, A.M.; Hargrove, L.J. Assessing the relative contributions of active ankle and knee assistance to the walking mechanics of transfemoral amputees using a powered prosthesis. PLoS ONE 2016, 11, e0147661. [Google Scholar] [CrossRef] [Green Version]
- Quesada, R.E.; Caputo, J.M.; Collins, S.H. Increasing ankle push-off work with a powered prosthesis does not necessarily reduce metabolic rate for transtibial amputees. J. Biomech. 2016, 49, 3452–3459. [Google Scholar] [CrossRef] [Green Version]
- Delussu, A.S.; Paradisi, F.; Brunelli, S.; Pellegrini, R.; Zenardi, D.; Traballesi, M. Comparison between SACH foot and a new multiaxial prosthetic foot during walking in hypomobile transtibial amputees: Physiological responses and functional assess-ment. Eur. J. Phys. Rehabil. Med. 2016, 52, 304–309. [Google Scholar]
- Khaghani, A.; Takamjani, I.E.; Layeghi, F. Tehran silicon partial foot prosthesis new method of making silicon partial foot prosthesis. Int. J. Adv. Biotechnol. Res. 2016, 7, 2045–2057. [Google Scholar]
- Narayanan, G.; Gnanasundaram, S.; Ranganathan, M.; Ranganathan, R.; Gopalakrishna, G.; Das, B.N.; Mandal, A.B. Improved design and development of a functional moulded prosthetic foot. Disabil. Rehabil. Assist. Technol. 2014, 11, 407–412. [Google Scholar] [CrossRef] [PubMed]
- Isaacs, M.R.; Ward, J.; Mcgowan, C.P.; Lee, D. Walking dynamics and speed effects in persons wearing a passive foot-ankle prosthesis. Integr. Comp. Biol. 2016, 56, E100. [Google Scholar]
- Grimmer, M.; Holgate, M.; Holgate, R.; Boehler, A.; Ward, J.; Hollander, K.; Sugar, T.; Seyfarth, A. A powered prosthetic ankle joint for walking and running. Biomed. Eng. Online 2016, 15, 141. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- LaPrè, A.K.; Umberger, B.R.; Sup, F.C. A Robotic ankle–foot prosthesis with active alignment. J. Med. Devices 2016, 10, 025001. [Google Scholar] [CrossRef]
- Rábago, C.A.; Whitehead, J.A.; Wilken, J.M. Evaluation of a powered ankle-foot prosthesis during slope ascent gait. PLoS ONE 2016, 11, e0166815. [Google Scholar] [CrossRef] [PubMed]
- Ettinger, S. Ankle joint prosthesis worse outcome by overweight? Z. Orthop. Unfall. 2016, 154, 15. [Google Scholar] [PubMed]
- Esposito, E.R.; Whitehead, J.M.A.; Wilken, J.M. Step-to-step transition work during level and inclined walking using passive and powered ankle–foot prostheses. Prosthet. Orthot. Int. 2016, 40, 311–319. [Google Scholar] [CrossRef]
- Esposito, E.R.; Lipe, D.H.; A Rábago, C. Creative prosthetic foot selection enables successful ambulation in stiletto high heels. Prosthet. Orthot. Int. 2018, 42, 344–349. [Google Scholar] [CrossRef]
- Esposito, E.R.; Miller, R.H. Maintenance of muscle strength retains a normal metabolic cost in simulated walking after transtibial limb loss. PLoS ONE 2018, 13, e0191310. [Google Scholar] [CrossRef] [Green Version]
- Lacraz, A.; Armand, S.; Turcot, K.; Carmona, G.; Stern, R.; Borens, O.; Assal, M. Comparison of the Otto Bock solid ankle cushion heel foot with wooden keel to the low-cost CR-Equipements solid ankle cushion heel foot with polypropylene keel: A randomized prospective double-blind crossover study assessing patient satisfaction and energy. Prosthet. Orthot. Int. 2017, 41, 258–265. [Google Scholar] [CrossRef]
- Gardiner, J.; Bari, A.Z.; Kenney, L.; Twiste, M.; Moser, D.; Zahedi, S.; Howard, D. Performance of optimized prosthetic ankle designs that are based on a hydraulic variable displacement actuator (VDA). IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 2418–2426. [Google Scholar] [CrossRef]
- Ke, M.-J.; Huang, K.-C.; Lee, C.-H.; Chu, H.-Y.; Wu, Y.-T.; Chang, S.-T.; Chiang, S.-L.; Su, K.-C. Influence of three different curvatures flex-foot prosthesis while single-leg standing or running: A finite element analysis study. J. Mech. Med. Biol. 2016, 17. [Google Scholar] [CrossRef]
- Tao, Z.; Ahn, H.-J.; Lian, C.; Lee, K.-H.; Lee, C.-H. Design and optimization of prosthetic foot by using polylactic acid 3D printing. J. Mech. Sci. Technol. 2017, 31, 2393–2398. [Google Scholar] [CrossRef]
- Lee, J.D.; Mooney, L.M.; Rouse, E.J. Design and characterization of a quasi-passive pneumatic foot-ankle prosthesis. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 823–831. [Google Scholar] [CrossRef]
- Mazumder, O.; Kundu, A.; Lenka, P.; Bhaumik, S. Design of speed adaptive myoelectric active ankle prosthesis. Electron. Lett. 2017, 53, 1508–1510. [Google Scholar] [CrossRef]
- Anonymous. Bionic foot design: An inside view. Electron. Lett. 2017, 53, 1499. [Google Scholar] [CrossRef]
- Weerakkody, T.H.; Lalitharatne, T.D.; Gopura, R.A.R.C. Adaptive foot in lower-limb prostheses. J. Robot. 2017, 2017, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Koehler-McNicholas, S.R.; Nickel, E.A.; Medvec, J.; Barrons, K.; Mion, S.; Hansen, A.H. The influence of a hydraulic prosthetic ankle on residual limb loading during sloped walking. PLoS ONE 2017, 12, e0173423. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Koehler-McNicholas, S.R.; Slater, B.C.S.; Koester, K.; Nickel, E.A.; Ferguson, J.E.; Hansen, A.H. Bimodal ankle-foot prosthesis for enhanced standing stability. PLoS ONE 2018, 13, e0204512. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shepherd, M.K.; Rouse, E.J. The VSPA Foot: A quasi-passive ankle-foot prosthesis with continuously variable stiffness. IEEE Trans. Neural Syst. Rehabil. Eng. 2017, 25, 2375–2386. [Google Scholar] [CrossRef] [PubMed]
- Dong, D.; Ge, W.; Liu, S.; Xia, F.; Sun, Y. Design and optimization of a powered ankle-foot prosthesis using a geared five-bar spring mechanism. Int. J. Adv. Robot. Syst. 2017, 14, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Dong, D.; Convens, B.; Sun, Y.; Ge, W.; Cherelle, P.; VanderBorght, B. The effects of variable mechanical parameters on peak power and energy consumption of ankle-foot prostheses at different speeds. Adv. Robot. 2018, 32, 1229–1240. [Google Scholar] [CrossRef]
- Lechler, K.; Frossard, B.; Whelan, L.; Langlois, D.; Müller, R.; Kristjansson, K. Motorized biomechatronic upper and lower limb prosthesesd-clinically relevant outcomes. PM&R 2018, 10, S207–S219. [Google Scholar]
- Eslamy, M.; Alipour, K. Synergy-based gaussian process estimation of ankle angle and torque: Conceptualization for high level controlling of active robotic foot prostheses/orthoses. J. Biomech. Eng. 2019, 141. [Google Scholar] [CrossRef] [PubMed]
- Jayaraman, C.; Hoppe-Ludwig, S.; Deems-Dluhy, S.; McGuire, M.; Mummidisetty, C.; Siegal, R.; Naef, A.; Lawson, B.E.; Goldfarb, M.; Gordon, K.E.; et al. Impact of powered knee-ankle prosthesis on low back muscle mechanics in transfemoral amputees: A case series. Front. Neurosci. 2018, 12, 134. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hahn, A.; Sreckovic, I.; Reiter, S.; Mileusnic, M. First results concerning the safety, walking, and satisfaction with an innovative, microprocessor-controlled four-axes prosthetic foot. Prosthet. Orthot. Int. 2018, 42, 350–356. [Google Scholar] [CrossRef] [PubMed]
- Armannsdottir, A.; Tranberg, R.; Halldorsdottir, G.; Briem, K. Frontal plane pelvis and hip kinematics of transfemoral amputee gait. Effect of a prosthetic foot with active ankle dorsiflexion and individualized training—A case study. Disabil. Rehabil. Assist. Technol. 2017, 13, 388–393. [Google Scholar] [CrossRef] [PubMed]
- Zelik, K.E.; Honert, E.C. Ankle and foot power in gait analysis: Implications for science, technology and clinical assessment. J. Biomech. 2018, 75, 1–12. [Google Scholar] [CrossRef]
- Gardinier, E.S.; Kelly, B.M.; Wensman, J.; Gates, D.H. A controlled clinical trial of a clinically-tuned powered ankle prosthesis in people with transtibial amputation. Clin. Rehabil. 2017, 32, 319–329. [Google Scholar] [CrossRef]
- Heitzmann, D.W.; Salami, F.; De Asha, A.R.; Block, J.; Putz, C.; Wolf, S.I.; Alimusaj, M. Benefits of an increased prosthetic ankle range of motion for individuals with a trans-tibial am-putation walking with a new prosthetic foot. Gait Posture 2018, 64, 174–180. [Google Scholar] [CrossRef]
- Montgomery, J.R.; Grabowski, A. Use of a powered ankle–foot prosthesis reduces the metabolic cost of uphill walking and improves leg work symmetry in people with transtibial amputations. J. R. Soc. Interface 2018, 15, 20180442. [Google Scholar] [CrossRef] [Green Version]
- Preißler, S.; Dietrich, C.; Seifert, S.; O Hofmann, G.; Miltner, W.H.R.; Weiss, T. The feeling prosthesis—Somatosensory feedback from the prosthesis foot reduces phantom limb pain dramatically. Pain Med. 2017, 19, 1698–1700. [Google Scholar] [CrossRef]
- Guerra-Farfán, E.; Nuñez, J.H.; Sanchez-Raya, J.; Crespo-Fresno, A.; Anglés, F.; Minguell, J. Prosthetic limb options for below and above knee amputations: Making the correct choice for the right patient. Curr. Trauma Rep. 2018, 4, 247–255. [Google Scholar] [CrossRef]
- Yang, J.R.; Yang, H.S.; Da Hyun Ahn DY, A.; Sim, W.S.; Yang, H.E. Differences in gait patterns of unilateral transtibial amputees with two types of energy storing prosthetic feet. Ann. Rehabil. Med. 2018, 42, 609–616. [Google Scholar] [CrossRef]
- Culver, S.; Bartlett, H.; Shultz, A.; Goldfarb, M. A Stair ascent and descent controller for a powered ankle prosthesis. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 993–1002. [Google Scholar] [CrossRef]
- Geeroms, J.; Flynn, L.; Jimenez-Fabian, R.; Vanderborght, B.; Lefeber, D. Energetic analysis and optimization of a MACCEPA actuator in an ankle prosthesis Energetic evaluation of the CYBERLEGs alpha-prosthesis variable stiffness actuator during a realistic load cycle. Auton. Robots 2018, 42, 147–158. [Google Scholar] [CrossRef]
- Quintero, D.; Reznick, E.; Lambert, D.J.; Rezazadeh, S.; Gray, L.; Gregg, R.D. Intuitive clinician control interface for a powered knee-ankle prosthesis: A case study. IEEE J. Transl. Eng. Heal. Med. 2018, 6, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Quintero, D.; Villarreal, D.J.; Lambert, D.J.; Kapp, S.; Gregg, R.D. Continuous-phase control of a powered knee–ankle prosthesis: Amputee experiments across speeds and inclines. IEEE Trans. Robot. 2018, 34, 686–701. [Google Scholar] [CrossRef] [PubMed]
- Tahir, U.; Hessel, A.L.; Lockwood, E.R.; Tester, J.T.; Han, Z.; Rivera, D.J.; Covey, K.L.; Huck, T.G.; Rice, N.A.; Nishikawa, K.C. Case study: A bio-inspired control algorithm for a robotic foot-ankle prosthesis provides adaptive control of level walking and stair ascent. Front. Robot. AI 2018, 5, 36. [Google Scholar] [CrossRef]
- Yin, K.; Pang, M.; Xiang, K.; Chen, J.; Zhou, S. Fuzzy iterative learning control strategy for powered ankle prosthesis. Int. J. Intell. Robot. Appl. 2018, 2, 122–131. [Google Scholar] [CrossRef]
- Houdijk, H.; Wezenberg, D.; Hak, L.; Cutti, A.G. Energy storing and return prosthetic feet improve step length symmetry while preserving margins of stability in persons with transtibial amputation. J. Neuroeng. Rehabil. 2018, 15, 76. [Google Scholar] [CrossRef]
- Glanzer, E.M.; Adamczyk, P.G. Design and validation of a semi-active variable stiffness foot prosthesis. IEEE Trans. Neural Syst. Rehabil. Eng. 2018, 26, 2351–2359. [Google Scholar] [CrossRef]
- Bai, X.; Ewins, D.; Crocombe, A.D.; Xu, W. A biomechanical assessment of hydraulic ankle-foot devices with and without micro-processor control during slope ambulation in trans-femoral amputees. PLoS ONE 2018, 13, e0205093. [Google Scholar] [CrossRef]
- Ray, S.F.; Wurdeman, S.R.; Takahashi, K.Z. Prosthetic energy return during walking increases after 3 weeks of adaptation to a new device. J. Neuroeng. Rehabil. 2018, 15, 1–8. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Burger, H.; Vidmar, G.; Zdovc, B.; Erzar, D.; Zalar, M. Comparison between three types of prosthetic feet: A randomized double-blind single-subject multiple-rater trial. Int. J. Rehabil. Res. 2018, 41, 173–179. [Google Scholar] [CrossRef] [PubMed]
- De Pauw, K.; Cherelle, P.; Roelands, B.; Lefeber, D.; Meeusen, R. The efficacy of the Ankle Mimicking Prosthetic Foot pro-totype 4.0 during walking: Physiological determinants. Prosthet. Orthot. Int. 2018, 42, 504–510. [Google Scholar] [CrossRef] [PubMed]
- De Pauw, K.; Cherelle, P.; Tassignon, B.; Van Cutsem, J.; Roelands, B.; Marulanda, F.G.; Lefeber, D.; VanderBorght, B.; Meeusen, R. Cognitive performance and brain dynamics during walking with a novel bionic foot: A pilot study. PLoS ONE 2019, 14, e0214711. [Google Scholar] [CrossRef] [Green Version]
- Gao, F.; Liu, Y.; Liao, W.-H. Design of powered ankle-foot prosthesis with nonlinear parallel spring mechanism. J. Mech. Des. 2018, 140, 055001. [Google Scholar] [CrossRef]
- Gao, F.; Liu, Y.-N.; Liao, W.-H. Implementation and testing of ankle-foot prosthesis with a new compensated controller. IEEE/ASME Trans. Mechatron. 2019, 24, 1775–1784. [Google Scholar] [CrossRef]
- Sahoo, S.; Pratihar, D.K.; Mukhopadhyay, S. A novel energy efficient powered ankle prosthesis using four-bar controlled compliant actuator. J. Mech. Eng. Sci. 2018, 232, 4664–4675. [Google Scholar] [CrossRef]
- Schmalz, T.; Altenburg, B.; Ernst, M.; Bellmann, M.; Rosenbaum, D. Lower limb amputee gait characteristics on a specifically designed test ramp: Preliminary results of a biomechanical comparison of two prosthetic foot concepts. Gait Posture 2019, 68, 161–167. [Google Scholar] [CrossRef]
- Wurdeman, S.R.; Stevens, P.M.; Campbell, J.H. Mobility analysis of AmpuTees (MAAT 5): Impact of five common prosthetic ankle-foot categories for individuals with diabetic/dysvascular amputation. J. Rehabil. Assist. Technol. Eng. 2019, 6. [Google Scholar] [CrossRef]
- Zarezadeh, F.; Arazpour, M.; Bahramizadeh, M.; Mardani, M.A. Comparing the effect of new silicone foot prosthesis and conventional foot prosthesis on plantar pressure in diabetic patients with transmetatarsal amputation. J. Rehabil. 2019, 20, 124–135. [Google Scholar] [CrossRef] [Green Version]
- Bhargava, R. The Jaipur foot and the Jaipur Prosthesis. Indian J. Orthop. 2019, 53, 5–7. [Google Scholar] [CrossRef]
- Zhang, X.; Fiedler, G.; Liu, Z. Evaluation of gait variable change over time as transtibial amputees adapt to a new prosthesis foot. BioMed Res. Int. 2019, 2019, 9252368. [Google Scholar] [CrossRef]
- Bartlett, H.L.; Lawson, B.E.; Goldfarb, M. Design, control, and preliminary assessment of a multifunctional semipowered ankle prosthesis. IEEE/ASME Trans. Mechatron. 2019, 24, 1532–1540. [Google Scholar] [CrossRef]
- Agboola-Dobson, A.; Wei, G.; Ren, L. Biologically inspired design and development of a variable stiffness powered an-kle-foot prosthesis. J. Mech. Robot. 2019, 11, 1–15. [Google Scholar] [CrossRef]
- Convens, B.; Dong, D.; Furnemont, R.; Verstraten, T.; Cherelle, P.; Lefeber, D.; VanderBorght, B. Modeling, design and test-bench validation of a semi-active propulsive ankle prosthesis with a clutched series elastic actuator. IEEE Robot. Autom. Lett. 2019, 4, 1823–1830. [Google Scholar] [CrossRef]
- Lenzi, T.; Cempini, M.; Hargrove, L.J.; Kuiken, T.A. Design, development, and validation of a lightweight nonback-drivable robotic ankle prosthesis. IEEE-ASME Trans. Mechatron. 2019, 24, 471–482. [Google Scholar] [CrossRef]
- Yu, T.; Plummer, A.R.; Iravani, P.; Bhatti, J.; Zahedi, S.; Moser, D. The design, control, and testing of an integrated elec-trohydrostatic powered ankle prosthesis. IEEE-ASME Trans. Mechatron. 2019, 24, 1011–1022. [Google Scholar] [CrossRef]
- Popescu, S.-C. Analysis of stress and prediction of the defects of an ankle prosthesis using the autodesk inventor software. Rev. Chim. 2019, 70, 1942–1946. [Google Scholar] [CrossRef]
- Herr, H.M.; Grabowski, A.M. Bionic ankle–foot prosthesis normalizes walking gait for persons with leg amputation. Proc. R. Soc. B Boil. Sci. 2011, 279, 457–464. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Au, S.; Berniker, M.; Herr, H. Powered ankle-foot prosthesis to assist level-ground and stair-descent gaits. Neural Netw. 2008, 21, 654–666. [Google Scholar] [CrossRef] [PubMed]
- Au, S.K.; Weber, J.A.; Herr, H.M. Powered ankle-foot prosthesis improves walking metabolic economy. IEEE Trans. Robot. 2009, 25, 51–66. [Google Scholar] [CrossRef] [Green Version]
- Eilenberg, M.F.; Geyer, H.; Herr, H.M. Control of a powered ankle–foot prosthesis based on a neuromuscular model. IEEE Trans. Neural Syst. Rehabilitation Eng. 2010, 18, 164–173. [Google Scholar] [CrossRef]
- Au, S.K.; Herr, H.M. Powered ankle-foot prosthesis. IEEE Robot. Autom. Mag. 2008, 15, 52–59. [Google Scholar] [CrossRef]
- Sup, F.; Bohara, A.; Goldfarb, M. Design and control of a powered transfemoral prosthesis. Int. J. Robot. Res. 2008, 27, 263–273. [Google Scholar] [CrossRef] [Green Version]
- Hansen, A.H.; Childress, D.S.; Miff, S.C.; Gard, S.; Mesplay, K.P. The human ankle during walking: Implications for design of biomimetic ankle prostheses. J. Biomech. 2004, 37, 1467–1474. [Google Scholar] [CrossRef] [PubMed]
- Collins, S.H.; Kuo, A.D. Recycling energy to restore impaired ankle function during human walking. PLoS ONE 2010, 5, e9307. [Google Scholar] [CrossRef] [Green Version]
- Torburn, L.; Powers, C.M.; Guiterrez, R.; Perry, J. Energy expenditure during ambulation in dysvascular and traumatic below-knee amputees: A comparison of five prosthetic feet. J. Rehabil. Res. Dev. 1995, 32, 111–119. [Google Scholar]
- Ziegler-Graham, K.; MacKenzie, E.J.; Ephraim, P.L.; Travison, T.G.; Brookmeyer, R. Estimating the Prevalence of Limb Loss in the United States: 2005 to Arch. Phys. Med. Rehabil. 2008, 89, 422–429. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cite | Title | Main Applicant | Body Part | Technology | Type |
|---|---|---|---|---|---|
| [7] | -Adjustment Device for A Lower Limb Prosthesis | Blatchford Products Limited. | Ankle | Hydraulic | Hybrid |
| [8] | -Below-knee Prosthesis Provided with Power Ankle | Beijing Gongdao Fengxing Intelligent | Ankle/Foot | Electronic | ESAR |
| [9] | -Bifurcated, Multi-purpose Prosthetic Foot | Christensen Roland J. | Foot | Mechanical | ESAR |
| [10] | -Bi-modal Ankle-foot Device | Hansen Andrew H. | Ankle/Foot | Mechanical | CESR |
| [11] | -Controlling Power in A Prosthesis or orthosis Based on Predicted Walking Speed or Surrogate for Same | Herr Hugh M. | Ankle/Foot | Electronic | CESR |
| [12] | -Damping Device for A Prosthesis | Ossur Hf. | Ankle | Mechanical | Hybrid |
| [13] | -Energy Storing Foot Plate | Iversen Edwin Kay | Ankle/Foot | Mechanical | ESAR |
| [14] | -Further Improvements to Ankle–foot Prosthesis and orthosis Capable of Automatic Adaptation to Sloped Walking Surfaces | Hansen Andrew H. | Ankle/Foot | Mechanical | CESR |
| [15] | -Joints for Prosthetic, orthotic and/or Robotic Devices | Rifkin Jerome R. | Foot | Mechanical | Hybrid |
| [16] | -Low Profile Prosthetic Foot | Jonsson Orn Ingvi | Foot | Mechanical | ESAR |
| [17] | -Lower Limb Prosthetic Device with A Wave Spring | Rubie Eric W. | Foot | Mechanical | ESAR |
| [18] | -Modular Prosthetic Foot | Miller Joseph A. | Foot | Mechanical | ESAR |
| [19] | -Orthopedic Foot Part | Otto Bock Holding | Ankle/Foot | Electronic | Active |
| [20] | -Passive Ankle Prosthesis with Energy Return Simulating that of A Natural Ankle | Joseph M. Schimmels | Ankle/Foot | Mechanical | CESR |
| [21] | -Passive orthopedic Aid in the form of a Foot Prosthesis or Foot orthosis | Otto Bock Healthcare | Ankle/Foot | Hydraulic | Active |
| [22] | -Power Below-knee Prosthesis with Discrete Soft Toe Joints | Beijing Gongdao Fengxing Intelligent | Ankle/Foot | Mechanical | ESAR |
| [23] | -Prosthetic Ankle–foot System | Universiteit Gent | Ankle/Foot | Mechanical | Hybrid |
| [24] | -Prosthetic Energy Storing and Releasing Apparatus and Methods | Phillips Van L. | Foot | Mechanical | ESAR |
| [25] | -Prosthetic Foot | Keith B. Smith | Foot | Mechanical | ESAR |
| [26] | -Prosthetics Using Curved Dampening Cylinders | Aaron Taszreak | Ankle/foot | Mechanical | ESAR |
| [27] | -A Foot with A Vacuum Unit Activated by an Ankle Motion | Duger Mustafa | Ankle | Mechanical | Hybrid |
| [28] | -Artificial Ankle, Artificial Foot and Artificial Leg | Falz & Kannenberg Gmbh | Ankle | Electronic | Active |
| [29] | -Artificial Limb Prosthesis Leg Below Knee & Above Knee | Univ Bharath | Ankle/Foot | Mechanical | ESAR |
| [30] | -Flexible Prosthetic Appliance | Brown Christopher A. | Foot | Mechanical | Hybrid |
| [31] | -Foot for Mobility Device | Sanders Michael R. | Foot | Mechanical | ESAR |
| [32] | -High-performance Multi-component Prosthetic Foot | Rubie Eric W. | Foot | Mechanical | ESAR |
| [33] | -Hydraulic Actuating Unit and Artificial Foot Prosthesis System Having the Same | Gyeonggyeongcheol | Ankle | Electronic | Hybrid |
| [34] | -Hydraulic System for A Knee-ankle Assembly Controlled by a Microprocessor | Xavier Bonnet | Ankle | Electronic | CESR |
| [35] | -Prosthesis Structure for Lower-limb Amputees | Officine Ortopediche Rizzoli Sr. | Ankle/Foot | Electronic | Hybrid |
| [36] | -Prosthetic Foot | Ability Dynamics Llc. | Foot | Mechanical | ESAR |
| [37] | -Prosthetic Foot | Frizen | Foot | Mechanical | ESAR |
| [38] | -Prosthetic Foot | Frizen Dzheff | Foot | Mechanical | ESAR |
| [39] | -Prosthetic Foot | Luder Mosler | Foot | Mechanical | ESAR |
| [40] | -Prosthetic Foot | The Ohio Willow Wood Company | Foot | Mechanical | ESAR |
| [41] | -Prosthetic Foot with a Curved Split | Jonsson Vilhjalmur Freyr | Foot | Mechanical | ESAR |
| [42] | -Prosthetic Foot with Dual Foot Blades and Vertically offset Toe | Lecomte Christophe Guy | Foot | Mechanical | ESAR |
| [43] | -Prosthetic Foot with Floating forefoot Keel | Christensen Roland J. | Foot | Mechanical | ESAR |
| [44] | -Prosthetic Limb | 3d Systems | Ankle/Foot | Mechanical | ESAR |
| [45] | -Prosthetic System | Hawkins Ryan | Ankle | Mechanical | Hybrid |
| [46] | -Smooth Rollover insole for Prosthetic Foot | Clausen Arinbjorn Viggo | Foot | Mechanical | ESAR |
| [47] | -System for Powered Ankle–foot Prosthesis with Active Control of Dorsiflexion-plantarflexion and inversion-eversion | Mo Rastgaar | Ankle | Electronic | Hybrid |
| [48] | -Walking Controller for Powered Ankle Prostheses | Michael Goldfarb | Ankle | Electronic | Active |
| [49] | -Actuated Prosthesis for Amputees | Bedard Stephane | Ankle/Foot | Electronic | Active |
| [50] | -Additive Manufacturing Produced Prosthetic Foot | James M. Colvin | Foot | Mechanical | ESAR |
| [51] | -Ankle Prosthesis Assembly | Ermalyuk Vladimir Nikolaevich | Foot | Hydraulic | Hybrid |
| [52] | -Ankle Prosthesis Assembly of Foot | Suslov Andrej Vladimirovich | Foot | Mechanical | ESAR |
| [53] | -Artificial Foot | Inha Industry Partnership Institute | Foot | Electronic | Active |
| [54] | -Artificial Foot for Sports | Seo Jung Woong | Ankle/Foot | Mechanical | ESAR |
| [55] | -Artificial Foot Prosthesis System | Sogang University | Ankle | Electronic | Active |
| [56] | -Artificial Human Limbs and Joints Employing Actuators, Springs, and Variable-damper Elements | Massachusetts Institute of Technology | Ankle | Mechanical | Active |
| [57] | -Controlled Coronal Stiffness Prosthetic Ankle | Klute Glenn | Ankle | Mechanical | Hybrid |
| [58] | -False Foot of Carbon -fibre Composite | Beijing Baimtec. | Foot | Mechanical | ESAR |
| [59] | -Foot Prosthesis | Medi Gmbh & Co. | Foot | Mechanical | ESAR |
| [60] | -Foot Prosthesis with Adjustable Rollover | Mccarvill Sarah | Foot | Mechanical | ESAR |
| [61] | -Hybrid Ankle Joints | Jo Hyun | Ankle | Electronic | Active |
| [62] | -instrumented Prosthetic Foot | Victhom Human Bionics Inc. | Foot | Mechanical | ESAR |
| [63] | -Layering Technique for An Adjustable, Repairable Variable Stiffness Prosthetic Foot | Gonzalez Roger V. | Foot | Mechanical | ESAR |
| [64] | -Passive orthopaedic Aid in the form of a Foot Prosthetic or orthotic | Mosler | Foot | Mechanical | Hybrid |
| [65] | -Prosthetic Ankle Module | Ásgeirsson Sigurõur | Foot | Mechanical | ESAR |
| [66] | -Prosthetic Ankle Module | Nijman Jeroen | Foot | Mechanical | ESAR |
| [67] | -Prosthetic Ankle: A Method of Controlling Based on Adaptation to Speed | Arinbjorn Clausen | Ankle | Mechanical | Active |
| [68] | -Prosthetic Device and Method with Compliant Linking Member and Actuating Linking Member | Matthew A. Holgate | Ankle/Foot | Electronic | CESR |
| [69] | -Prosthetic Foot | Ability Dynamics Llc. | Foot | Mechanical | ESAR |
| [70] | -Prosthetic Foot | Ability Dynamics Llc. | Foot | Mechanical | ESAR |
| [71] | -Prosthetic Foot | Doddroe Jeffrey L. | Foot | Mechanical | ESAR |
| [72] | -Prosthetic Foot | Starker Felix | Foot | Mechanical | ESAR |
| [73] | -Prosthetic Foot | Sulprizio Michael Scott | Foot | Mechanical | ESAR |
| [74] | -Prosthetic Foot and Manufacturing Method Thereof | Kim Sa Yeop | Foot | Mechanical | ESAR |
| [75] | -Prosthetic Vacuum System | Ossur Hf. | Foot | Electronic | Hybrid |
| [76] | -Responsive Prosthesis | Howell | Foot | Mechanical | ESAR |
| [77] | -A Prosthesis or orthosis Comprising a Hinge Joint System for Functionally Assisting, Enhancing and/or Replacing A Hinge Joint of a Human or Animal Subject | Vrije Universiteit Brussel | Ankle/Foot | Mechanical | CESR |
| [78] | -Active Lower Leg Prosthesis Device | Sogang University | Ankle | Hydraulic | CESR |
| [79] | -Apparatus and Method for A Split Toe Blade | Rubie Eric W. | Foot | Mechanical | ESAR |
| [80] | -Artificial Ankle Joint Limb Based on Flexible Driver | Nanjing Institute of Technology | Ankle | Mechanical | Hybrid |
| [81] | -Artificial Foot | Hornos Pedro | Foot | Mechanical | ESAR |
| [82] | -Artificial Foot and Method for Controlling the Movement Thereof | Otto Bock Holding. | Foot | Mechanical | ESAR |
| [83] | -Bow -shaped Ankle Structure Combined Material Artificial Limb Foot Core | Lin Yusen. | Foot | Mechanical | ESAR |
| [84] | -Catapult Ankle and Related Methods | Rouse Elliott J. | Ankle | Electronic | Hybrid |
| [85] | -Dispositif De Prothese De Cheville Controle Par Une Prothese De Genou Motorisee Sensible A La Pesanteur | Millinav | Ankle | Mechanical | Hybrid |
| [86] | -Electronically Controlled Prosthetic System | Martin James Jay | Foot | Electronic | Active |
| [87] | -Fine Energy Storage Foot of Carbon | Sun Yongshang | Foot | Mechanical | ESAR |
| [88] | -Foot Prosthesis | Kranner Werner | Foot | Mechanical | ESAR |
| [89] | -Foot Prosthesis with Resilient Multi-axial Ankle | Lecomte Christophe Guy | Foot | Mechanical | ESAR |
| [90] | -Microprocessor Controlled Prosthetic Ankle System for Footwear and Terrain Adaptation | Palmer Michael | Ankle | Hydraulic | Active |
| [91] | -Novel Fine Prosthetic Foot of Comfortable Energy Storage Carbon | Guangzhou Kangmeite Prostheses Co Ltd. | Foot | Mechanical | ESAR |
| [92] | -Oil Pressure Ankle Joint | Ken Dall Enterprise. | Ankle | Hydraulic | Hybrid |
| [93] | -Overmould Attachments for Prosthetic Foot | Lecomte Christophe Guy | Foot | Mechanical | ESAR |
| [94] | -Prosthetic Ankle and Method of Controlling Same Based on Adaptation to Speed | Ossur Hf. | Ankle | Electronic | Active |
| [95] | -Prosthetic Foot | Keith B. Smith | Foot | Mechanical | ESAR |
| [96] | -Prosthetic Foot | Otto Bock Holding. | Foot | Mechanical | ESAR |
| [97] | -Prosthetic Foot | Sun Yongshang | Foot | Mechanical | ESAR |
| [98] | -Prosthetic Foot Structure | Cheng Yao Teng | Foot | Mechanical | ESAR |
| [99] | -Prosthetic Foot with Energy Transfer Medium including Variable Viscosity Fluid | Christensen Roland J. | Foot | Mechanical | ESAR |
| [100] | -Prosthetic Foot, System of A Prosthetic Foot and A Shoe, and Method for Adapting the Heel Height of a Prosthetic Foot | Hermann Meyer | Ankle/Foot | Mechanical | ESAR |
| [101] | -Prosthetic Joint with Mechanical Response System to Position and Rate of Change | Lincoln Lucas Samuel | Ankle | Mechanical | CESR |
| [102] | -Prosthetic Sport Feet | Clausen Arinbjorn V. | Foot | Mechanical | ESAR |
| [103] | -Shock Attenuation Energy -absorbing Prosthetic Foot Foot Core | Li Jingtong | Foot | Mechanical | ESAR |
| [104] | -Single-freedom-degree Active Type Ankle Joint Artificial Limb Based on Closed Type Hydraulic Driving System | Wang Xingjian | Ankle/Foot | Hydraulic | Active |
| [105] | -Systems and Control Methodologies for Improving Stability in Powered Lower Limb Devices | Vanderbilt University | Ankle/Foot | Electronic | Active |
| [106] | -Actuator Control System and Related Methods | Northern Arizona University. | Ankle/Foot | Electronic | Active |
| [107] | -Ankle–foot Prosthesis Device | Liu Yan Nan | Ankle | Electronic | Active |
| [108] | -Articulated orthopaedic Foot with Shock Absorption, Which Prevents the Impact Produced in Each Foot-loading Cycle When Walking or Running, Providing Natural Movement and Stability for The User | Mora Morales Miguel | Foot | Mechanical | ESAR |
| [109] | -Artificial Foot | Lindhe Christoffer. | Foot | Mechanical | ESAR |
| [110] | -Biomimetic and Variable Stiffness Ankle System and Related Methods | Rouse Elliott J. | Ankle | Mechanical | Hybrid |
| [111] | -Bionic Prosthetic Mechanical Foot with Parallel Joints | Xing Zhiping | Ankle/Foot | Electronic | Hybrid |
| [112] | -Clearance Enhancer for Lower Limb Prosthesis | Palmer Jeffrey Ray | Foot | Mechanical | ESAR |
| [113] | -Energy Storage Foot | Bonawei Rehabilitation. | Ankle/Foot | Mechanical | ESAR |
| [114] | -Foot Prosthesis | Otto Bock Holding. | Ankle/Foot | Electronic | Hybrid |
| [115] | -Foot Prosthesis | Sven Kaltenborn | Ankle/Foot | Hydraulic | Hybrid |
| [116] | -Foot Prosthesis Has Blade | Benjamin Penot | Ankle/Foot | Mechanical | Hybrid |
| [117] | -Foot Prosthesis with Dymic Variable Keel Resistance | Matthew J. Habecker | Ankle/Foot | Mechanical | CESR |
| [118] | -Foot Prosthesis with Dynamic Variable Keel Resistance | Matthew J. Habecker | Ankle/Foot | Mechanical | Hybrid |
| [119] | -Hydraulic Ankle | Chia-pao Cheng | Ankle | Hydraulic | Hybrid |
| [120] | -Hydraulic Ankle Joint | Ken Dall Enterprise. | Ankle | Hydraulic | Hybrid |
| [121] | -Jointless Prosthetic Foot | Boiten Herman. | Foot | Mechanical | ESAR |
| [122] | -Light intelligent Energy-storage Energy-releasing Ankle Prosthesis | Ye Yanhong. | Foot | Mechanical | CESR |
| [123] | -Limb Prosthesis System and Method | Bartlett Brian. | Ankle/Foot | Mechanical | Hybrid |
| [124] | -Linear Actuator for Asymmetric Power Generation and Dissipation | Michael Goldfarb. | Ankle | Electronic | Hybrid |
| [125] | -Lower Limb Prosthesis Comprising A Hydraulic Damping and A Vacuum Generating Mechanism | Graham Harris. | Ankle/Foot | Hydraulic | Active |
| [126] | -Medial-lateral Stabilizing Prosthetic Ankle/foot for Angled and Rough Ground Gait | Maitland Murray E. | Ankle/Foot | Mechanical | Hybrid |
| [127] | -Method for Operating A Prosthetic Ankle | Clausen Arinbjorn V. | Foot | Electronic | Active |
| [128] | -Modular Lower Limb Prosthesis System | Fairley Joseph. | Foot | Mechanical | ESAR |
| [129] | -Movement Support Apparatus | Endo Ken. | Ankle/Foot | Mechanical | CESR |
| [130] | -Polycentric Powered Ankle Prosthesis | Lenzi Tommaso. | Ankle | Electronic | Active |
| [131] | -Powered Artificial Ankle Based on Electro-hydraulic Direct Drive Technology | Huang Qi-tao. | Ankle | Hydraulic | Hybrid |
| [132] | -Prosthetic and Orthotic Devices Having Magnetorheological Elastomer Spring with Controllable Stiffness | Gudmundsson Ivar. | Foot | Mechanical | ESAR |
| [133] | -Prosthetic Ankle and Foot Combination | Moser David. | Ankle/Foot | Mechanical | ESAR |
| [134] | -Prosthetic Device | Fillauer Euro Ab. | Ankle/Foot | Mechanical | ESAR |
| [135] | -Prosthetic Device | Ramirez Christoffer. | Foot | Mechanical | ESAR |
| [136] | -Prosthetic Foot | Bonacini Daniele. | Foot | Mechanical | ESAR |
| [137] | -Prosthetic Foot | Smith Keith. | Foot | Mechanical | ESAR |
| [138] | -Prosthetic Foot | Willowwood Global. | Foot | Mechanical | ESAR |
| [139] | -Prosthetic Foot | Zamora David A. | Foot | Mechanical | ESAR |
| [140] | -Prosthetic Foot with Hybrid Layup | Gunnarssonn Ragnar. | Foot | Mechanical | ESAR |
| [141] | -Prosthetic Foot with Modular Construction | Kramer Leslie D. | Foot | Mechanical | ESAR |
| [142] | -Shank Prosthesis Provided with Double Foot Sole Plates | Zhang Jun. | Foot | Hydraulic | ESAR |
| [143] | -Spring Design for Prosthetic Applications | Prost Victor. | Foot | Mechanical | Hybrid |
| [144] | -Stair Ascent and Descent Control for Powered Lower Limb Devices | Vanderbilt University. | Ankle/Foot | Mechanical | ESAR |
| [145] | -Tapered Flex Plate for Prosthetic Foot | Jonsson Orn Ingvi. | Foot | Mechanical | ESAR |
| [146] | -Variable Bar Length Gear Five-bar Mechanism Active and Passive Ankle Artificial Limb | Univ Northwestern Polytechnical. | Ankle | Mechanical | Hybrid |
| [147] | -Variable Stiffness Prosthetic Foot | Sandahl David. | Foot | Mechanical | ESAR |
| [148] | -Adjustable Stiffness Prosthetic Foot | Smith Justin R. | Foot | Mechanical | ESAR |
| [149] | -Ankle–foot Prosthesis for Automatic Adaptation to Sloped Walking Surfaces | Hansen Andrew H. | Foot | Mechanical | CESR |
| [150] | -Artificial Ankle–foot System with Spring, Variable-damping, and Series-elastic Actuator Components | Massachusetts Institute of Technology. | Ankle/Foot | Electronic | Active |
| [151] | -Biomimetic Prosthetic Device | Schlafly Millicent Kay | Foot | Mechanical | CESR |
| [152] | -Carbon Fiber Prosthetic Foot | Nelson Ronald Harry. | foot | Mechanical | ESAR |
| [153] | -Compression Heel Prosthetic Foot | Parker Gene. | Foot | Mechanical | ESAR |
| [154] | -Foot Prosthesis | Pusch Martin. | Foot | Mechanical | ESAR |
| [155] | -Hydraulic Pressure Energy Storage Prosthetic Foot | Wang Zitong. | Ankle/Foot | Hydraulic | ESAR |
| [156] | -Hydraulic Prosthetic Ankle | Poulson Arlo Iii. | Ankle | Mechanical | CESR |
| [157] | -Low-energy Artificial Limb | Wang Jianhua. | Foot | Mechanical | ESAR |
| [158] | -Lower Limb Prosthesis | Blatchford Products. | Ankle/Foot | Electronic | Active |
| [159] | -Passive and Slope Adaptable Prosthetic Foot Ankle | Amiot David | Foot | Hydraulic | CESR |
| [160] | -Powered Ankle–foot Prosthesis | Herr Hugh M. | Ankle/Foot | Electronic | Active |
| [161] | -Prosthesis and Prosthetic Foot Adapter | Allermann Ralf. | Ankle/Foot | Mechanical | ESAR |
| [162] | -Prosthetic Ankle Joint Mechanism | Moser David. | Ankle | Hydraulic | Hybrid |
| [163] | -Prosthetic Apparatus and Method Therefor | Peter Gabriel A. | Foot | Mechanical | ESAR |
| [164] | -Prosthetic Feet Having Heel Height Adjustability | Albertson Aron Kristhjorn. | Ankle | Mechanical | CESR |
| [165] | -Prosthetic Foot | Friesen Jeff. | Foot | Mechanical | ESAR |
| [166] | -Prosthetic Foot | Grosskopf Stefan. | Foot | Mechanical | ESAR |
| [167] | -Prosthetic Foot | Guangdong Lanwan Intelligent Technology. | Ankle/Foot | Mechanical | Hybrid |
| [168] | -Prosthetic Foot | Jo Sung Hun. | Foot | Mechanical | ESAR |
| [169] | -Prosthetic Foot | Pusch Martin. | Foot | Mechanical | ESAR |
| [170] | -Prosthetic Foot Having A Function of Ankle | Kim Hyun Cheol. | Ankle/Foot | Mechanical | ESAR |
| [171] | -Prosthetic Foot insert and Prosthetic Foot | Mosler Loder. | Foot | Mechanical | ESAR |
| [172] | -Prosthetic Foot that Toe Part Can Rotate | Kim Hyun Cheol. | Foot | Mechanical | ESAR |
| [173] | -Prosthetic Foot with Enhanced Stability and Elastic Energy Return | Clausen Arinbjorn Viggo. | Foot | Hydraulic | CESR |
| [174] | -Prosthetic Foot with Removable Flexible Members | Clausen Arinbjorn Viggo. | Ankle/Foot | Hydraulic | ESAR |
| [175] | -Prosthetic Foot with Spaced Spring Elements | Day Jesse. | Foot | Mechanical | ESAR |
| [176] | -Prosthetic Foot and Prosthesis for A Lower Extremity | Radspieler Andreas. | Ankle/Foot | Mechanical | ESAR |
| [177] | -A Prosthetic Ankle and Foot Combination | Blatchford Products. | Ankle/Foot | Mechanical | Hybrid |
| [178] | -Foot Prosthesis Comprising A Damping Element | Pm Ingenierie Et Design. | Foot | Mechanical | Hybrid |
| [179] | -Lower Limb Prosthesis | Blatchford Products. | Ankle/Foot | Mechanical | Hybrid |
| [180] | -Oberschenkelprothesenpassteil | Klopf, Johannes. | Ankle/Foot | Mechanical | Hybrid |
| [181] | -Prosthesis or orthosis | Université Catholique De Louvain. | Foot | Mechanical | Hybrid |
| [182] | -Prosthetic Ankle Assembly and Ankle–foot System Comprising Same | Hein, Emily. | Ankle/Foot | Mechanical | Hybrid |
| [183] | -Prosthetic External Fixation Assembly for Post-amputee Ambulation | Dennis G. Haun. | Ankle/Foot | Mechanical | Hybrid |
| [184] | -Prosthetic Foot | Comité International De La Croix-rouge. | Foot | Mechanical | Hybrid |
| [185] | -Prosthetic Foot and Connector for Prosthetic Foot | Xiborg Inc. | Foot | Mechanical | ESAR |
| [186] | -Prótesis Mecánica De Pie | Instituto Tecnológico José Mario Molina Pasquel Y. Henriquez. | Foot | Mechanical | CESR |
| [187] | -Pyramidal Prosthetic Foot | Gosakan, Haripriya. | Foot | Mechanical | ESAR |
| [188] | -Single Axis Ankle–foot Prosthesis with Mechanically Adjustable Range of Motion | Mcnicholas Sara Koehler. | Ankle/Foot | Mechanical | Hybrid |
| Cite | Main Author | Document Topics | Year |
|---|---|---|---|
| [189] | Huang, Stephanie | Powered Ankle Prosthesis Design | 2014 |
| [190] | Sun, Jinming | Clinical Study | 2014 |
| [191] | Wezenberg, Daphne | Comparative Study | 2014 |
| [192] | Nickel, Eric | Component Design | 2014 |
| [193] | Mulder, Inge A. | Foot Prosthesis Design | 2014 |
| [194,195] | Safaeepour, Zahra | Powered Ankle/foot Prosthesis design | 2014 |
| [196] | Zhu, Jinying | Powered Ankle/foot Prosthesis design | 2014 |
| [197,198] | Ko, Chang-Yong | Clinical Study | 2014–2016 |
| [199,200] | Cherelle, Pierre | Powered Ankle/foot Prosthesis design | 2014–2017 |
| [201,202,203] | Simon, Ann M. | Component Design/Study | 2014–2018 |
| [204] | Caputo, Joshua M. | Gait Study | 2014 |
| [205] | Asencio, J. G. | Clinical Study | 2015 |
| [206] | Bonnet, Xavier | Comparative Study | 2015 |
| [207] | Fairhurst, Stuart R. | Component Design | 2015 |
| [208] | Realmuto, Jonathan | Component Design | 2015 |
| [209] | Hessel, A. L. | Powered Ankle/foot Prosthesis design | 2015 |
| [210] | Rouse, Elliott J. | Powered Ankle/foot Prosthesis design | 2015 |
| [211] | Flynn, Louis | Powered Ankle/knee Prosthesis design | 2015 |
| [212] | Ficanha, Evandro Maicon | Powered Ankle/foot Prosthesis design | 2015 |
| [213,214] | Rice, Jacob J. | Powered Ankle/foot Prosthesis design | 2015–2016 |
| [215] | Jimenez-Fabian, Rene | Component Design | 2017 |
| [216,217,218] | Shultz, Amanda H. | Component Design/Study | 2015–2018 |
| [219,220] | Kim, Myunghee | Powered Ankle/foot Prosthesis design | 2015–2018 |
| [221] | Ingraham, Kimberly A. | Powered Ankle Prosthesis Study | 2016 |
| [222] | Quesada, Roberto E. | Clinical Study | 2016 |
| [223] | Delussu, Anna S. | Comparative Study | 2016 |
| [224] | Khaghani, Alireza | Component Design | 2016 |
| [225] | Narayanan, Govindarajan | Foot Prosthesis Design | 2016 |
| [226] | Isaacs, M. R. | Passive Ankle foot prosthesis study | 2016 |
| [227] | Grimmer, Martin | Powered Ankle Prosthesis Design | 2016 |
| [228] | LaPre, Andrew Kennedy | Powered Ankle/foot Prosthesis design | 2016 |
| [229] | Rabago, Christopher A. | Prosthesis Study | 2016 |
| [230] | Ettinger, Sarah | Study | 2016 |
| [231,232,233] | Esposito, Elizabeth Russell | Gait Study | 2016–2018 |
| [234] | Lacraz, Alain | Comparative Study | 2017 |
| [235] | Gardiner, James | Comparative Study | 2017 |
| [236] | Ke, Ming-Jen | Component Design | 2017 |
| [237] | Tao, Zhen | Foot Prosthesis Design | 2017 |
| [238] | Lee, Jeffrey D. | Pneumatic Ankle/foot Prosthesis design | 2017 |
| [239] | Mazumder, O. | Powered Ankle/foot Prosthesis design | 2017 |
| [240] | Anonymous | Powered Foot Prosthesis Design | 2017 |
| [241] | Weerakkody, Thilina H. | Review | 2017 |
| [242,243] | Koehler-McNicholas, Sara R. | Powered Ankle/foot Prosthesis design | 2017–2018 |
| [244] | Shepherd, Max K. | Powered Ankle/foot Prosthesis design | 2017 |
| [245,246] | Dong, Dianbiao | Powered Ankle/foot Prosthesis design | 2017–2018 |
| [247] | Lechler, Knut | Clinical Study | 2018 |
| [248] | Eslamy, Mahdy | Biomechanical Study | 2018 |
| [249] | Jayaraman, Chandrasekaran | Powered Ankle/foot Prosthesis study | 2018 |
| [250] | Hahn, Andreas | Powered Foot Prosthesis Evaluation | 2018 |
| [251] | Armannsdottir, Anna | Anathomical Study | 2018 |
| [252] | Zelik, Karl E. | Anathomical Study | 2018 |
| [253] | Gardinier, Emily S. | Clinical Study | 2018 |
| [254] | Heitzmann, Daniel W. W. | Clinical Study | 2018 |
| [255] | Montgomery, Jana R. | Clinical Study | 2018 |
| [256] | Preissler, Sandra | Clinical Study | 2018 |
| [257] | Guerra-Farfan, Ernesto | Comparative Study | 2018 |
| [258] | Yang, Ja Ryung | Comparative Study | 2018 |
| [259] | Culver, Steven | Component Design | 2018 |
| [260] | Geeroms, Joost | Component Design | 2018 |
| [261,262] | Quintero, David | Component Design | 2018 |
| [263] | Tahir, Uzma | Component Design | 2018 |
| [264] | Yin, Kaiyang | Component Design | 2018 |
| [265] | Houdijk, Han | Foot Prosthesis Design | 2018 |
| [266] | Glanzer, Evan M. | Powered Foot Prosthesis Design | 2018 |
| [267] | Bai, Xuefei | Prosthesis Study | 2018 |
| [268] | Ray, Samuel F. | Prosthesis Study | 2018 |
| [269] | Burger, Helena | Review | 2018 |
| [270,271] | De Pauw, Kevin | Anathomical Study | 2018–2019 |
| [272,273] | Gao, Fei | Powered Ankle/foot Prosthesis design | 2018–2019 |
| [274] | Sahoo, Saikat | Powered Ankle/foot Prosthesis design | 2018 |
| [275] | Schmalz, Thomas | Comparative Study | 2019 |
| [276] | Wurdeman, Shane R. | Comparative Study | 2019 |
| [277] | Zarezadeh, Fatemeh | Comparative Study | 2019 |
| [278] | Bhargava, Rakesh | Foot Prosthesis Design | 2019 |
| [279] | Zhang, Xueyi | Gait Study | 2019 |
| [280] | Bartlett, Harrison L. | Powered Ankle Prosthesis Design | 2019 |
| [281] | Agboola-Dobson, Alexander | Powered Ankle/foot Prosthesis design | 2019 |
| [282] | Convens, Bryan | Powered Ankle/foot Prosthesis design | 2019 |
| [283] | Lenzi, Tommaso | Powered Ankle/foot Prosthesis design | 2019 |
| [284] | Yu, Tian | Powered Ankle/foot Prosthesis design | 2019 |
| [285] | Popescu, Stefan-Catalin | Prosthesis Study | 2019 |
| No. | Cite | Article | Authors | Year |
|---|---|---|---|---|
| 1 | [286] | Bionic ankle–foot prosthesis normalizes walking gait for persons with leg amputation | Hugh M. Herr, Alena M. Grabowski | 2012 |
| 2 | [287] | Powered ankle–foot prosthesis to assist level-ground and stair-descent gaits | Samuel Aua, Max Berniker a, Hugh Herr | 2008 |
| 3 | [288] | Powered Ankle-Foot Prosthesis Improves Walking Metabolic Economy | Samuel K. Au, Jeff Weber, Hugh Herr | 2009 |
| 4 | [289] | Control of a Powered Ankle-Foot Prosthesis Based on a Neuromuscular Model | Michael F. Eilenberg, Hartmut Geyer, Hugh Herr | 2010 |
| 5 | [290] | Powered Ankle-Foot Prosthesis | Samuel K. Aa, Hugh M. Herr | 2008 |
| 6 | [291] | Design and Control of a Powered Transfemoral Prosthesis | Frank Sup, Amit Bohara, Michael Goldfarb | 2008 |
| 7 | [292] | The human ankle during walking: implications for design of biomimetic ankle prostheses | Andrew H. Hansena, Dudley S. Childressa, Steve C. Miff, Steven A. Garda, Kent P. Mesplayd | 2004 |
| 8 | [293] | Recycling Energy to Restore Impaired Ankle Function during Human Walking | Steven H. Collins, Arthur D. Kuo | 2010 |
| 9 | [294] | Energy expenditure during ambulation in dysvascular and traumatic below-knee amputees: A comparison of five prosthetic feet | Leslie Torburn, Christopher M. Powers, Robert Guiterrez, Jacquelin Perry | 1995 |
| 10 | [295] | Estimating the Prevalence of Limb Loss in the United States: 2005 to 2050 | Kathryn Ziegler-Graham, Ellen J. MacKenzie, Patti L. Ephraim, Thomas G. Travison, Ron Brookmeyer | 2008 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zagoya-López, J.; Zúñiga-Avilés, L.A.; Vilchis-González, A.H.; Ávila-Vilchis, J.C. Foot/Ankle Prostheses Design Approach Based on Scientometric and Patentometric Analyses. Appl. Sci. 2021, 11, 5591. https://doi.org/10.3390/app11125591
Zagoya-López J, Zúñiga-Avilés LA, Vilchis-González AH, Ávila-Vilchis JC. Foot/Ankle Prostheses Design Approach Based on Scientometric and Patentometric Analyses. Applied Sciences. 2021; 11(12):5591. https://doi.org/10.3390/app11125591
Chicago/Turabian StyleZagoya-López, Joel, Luis Adrián Zúñiga-Avilés, Adriana H. Vilchis-González, and Juan Carlos Ávila-Vilchis. 2021. "Foot/Ankle Prostheses Design Approach Based on Scientometric and Patentometric Analyses" Applied Sciences 11, no. 12: 5591. https://doi.org/10.3390/app11125591
APA StyleZagoya-López, J., Zúñiga-Avilés, L. A., Vilchis-González, A. H., & Ávila-Vilchis, J. C. (2021). Foot/Ankle Prostheses Design Approach Based on Scientometric and Patentometric Analyses. Applied Sciences, 11(12), 5591. https://doi.org/10.3390/app11125591