
Linear and Nonlinear Normal Interface Stiffness in Dry Rough Surface Contact Measured Using Longitudinal Ultrasonic Waves



Abstract
:1. Introduction
2. Theoretical Approach
2.1. Governing Equation
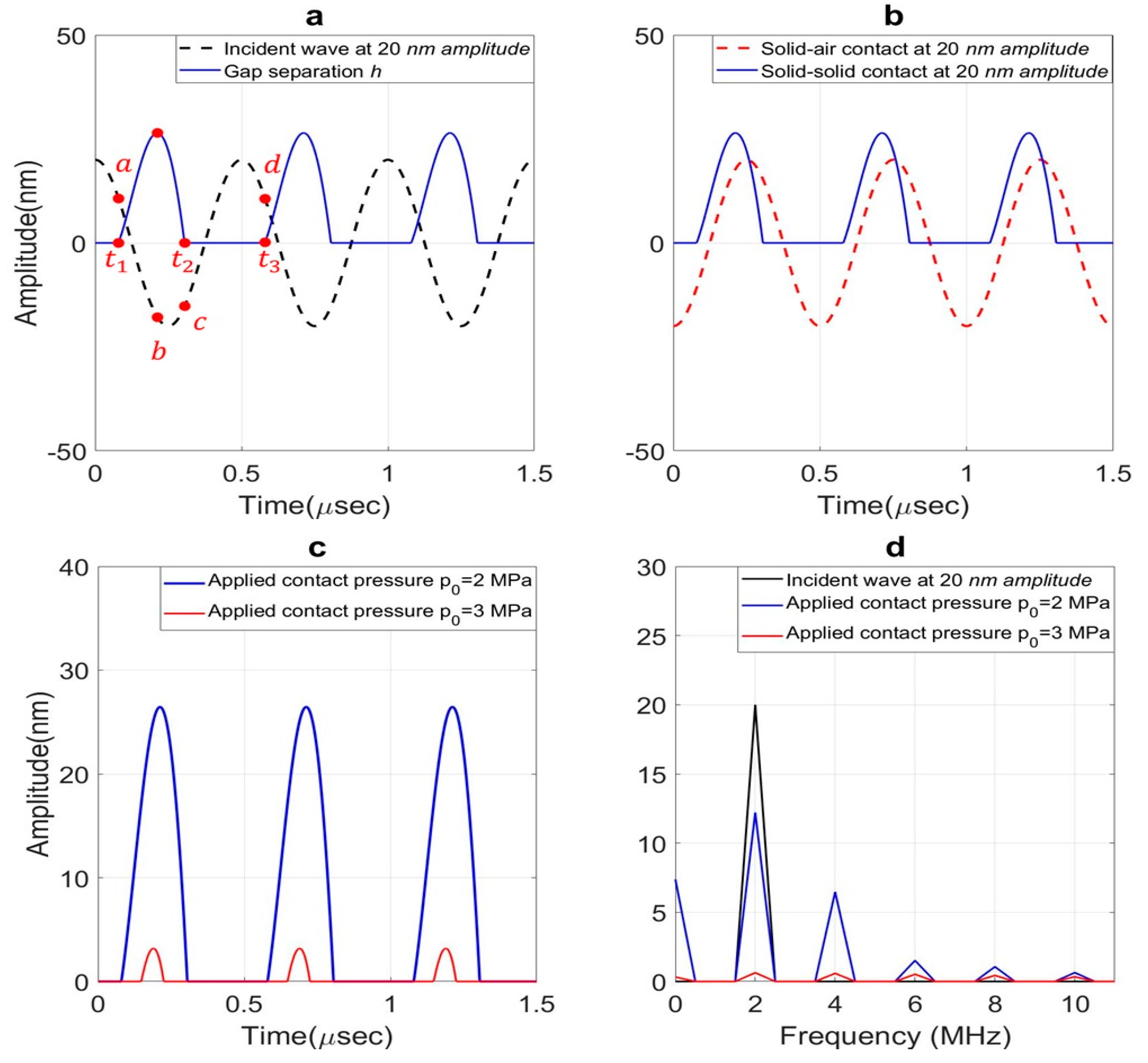
2.2. Determination of Contact Acoustic Nonlinearity (CAN)
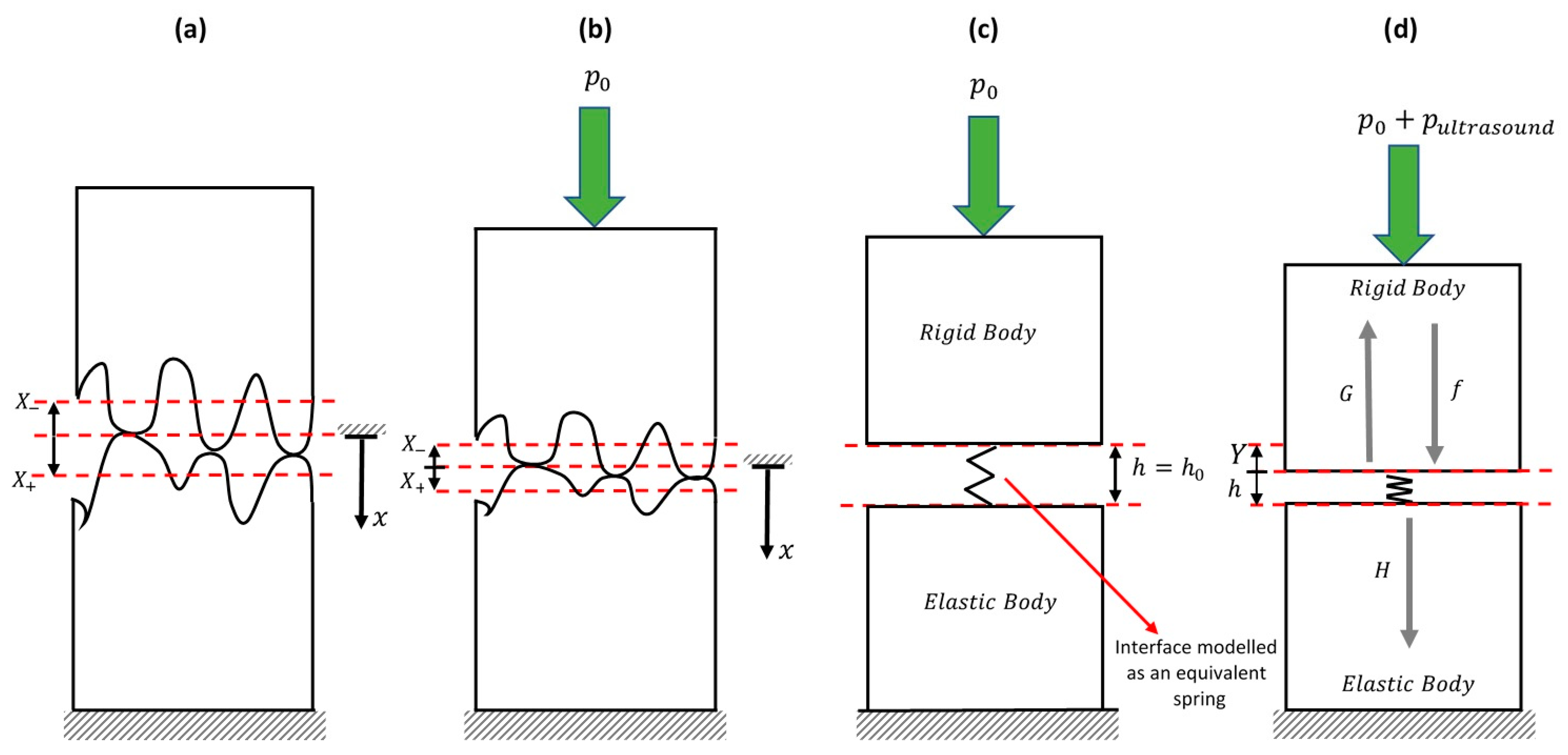
2.3. Theoretical Analysis
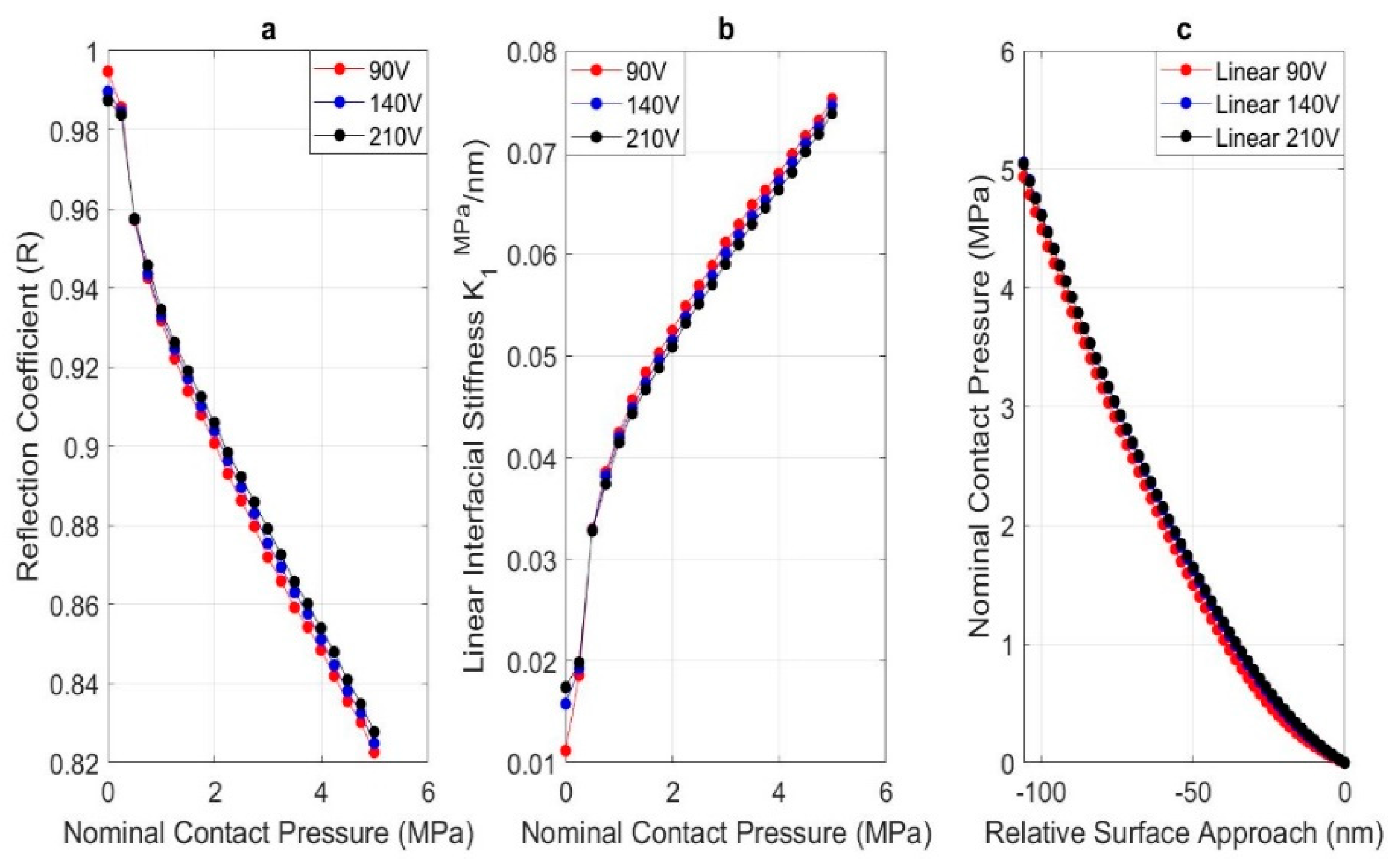
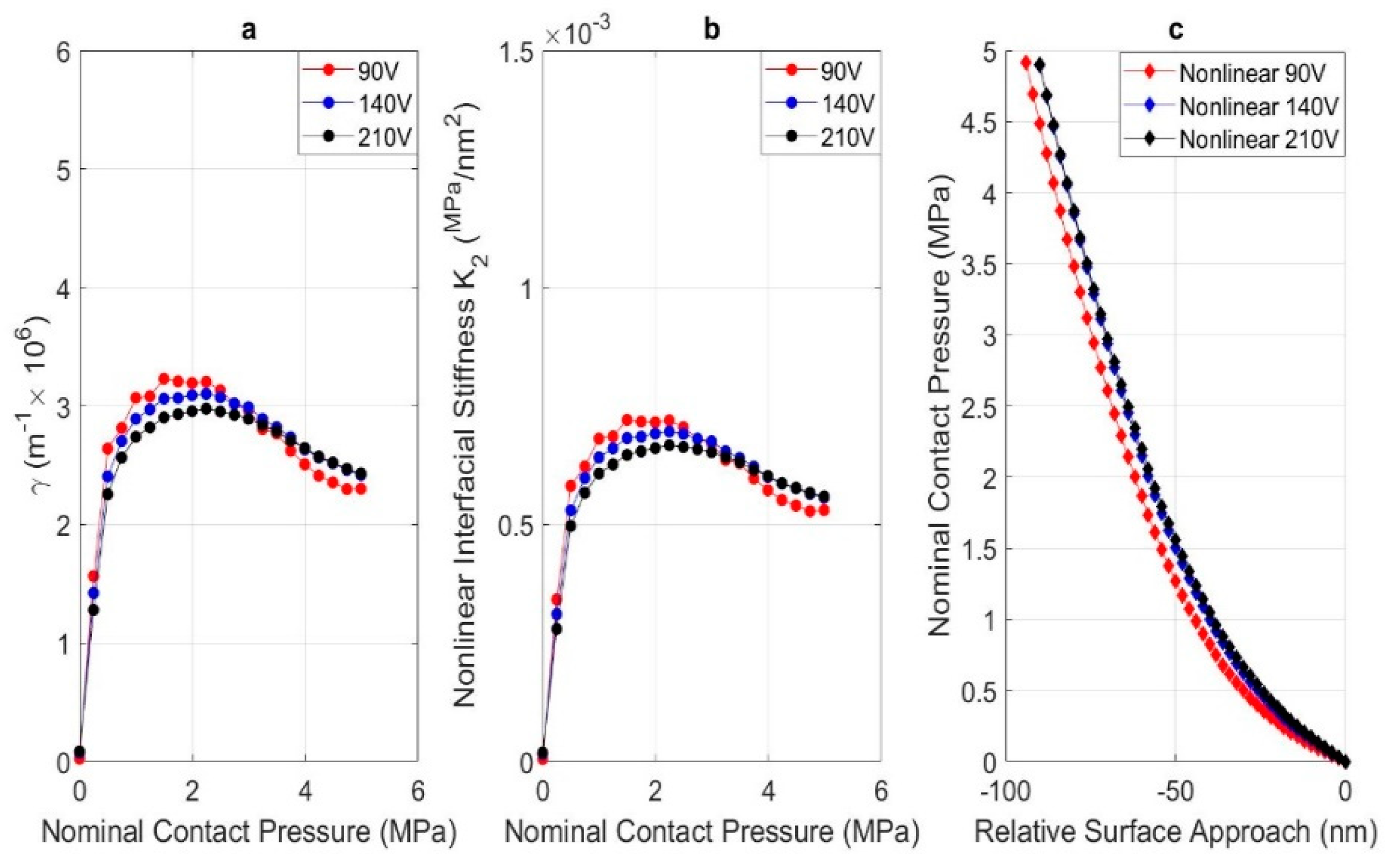
2.3.1. Linear and Nonlinear Interfacial Stiffness
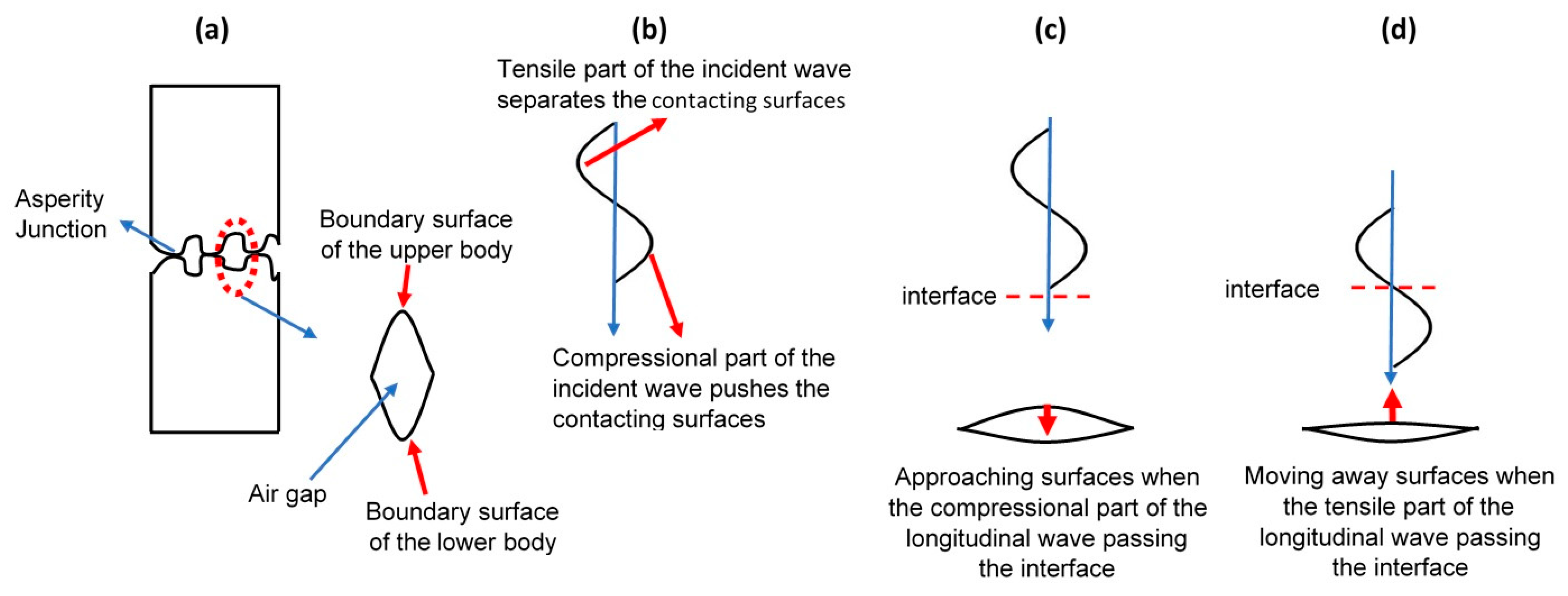
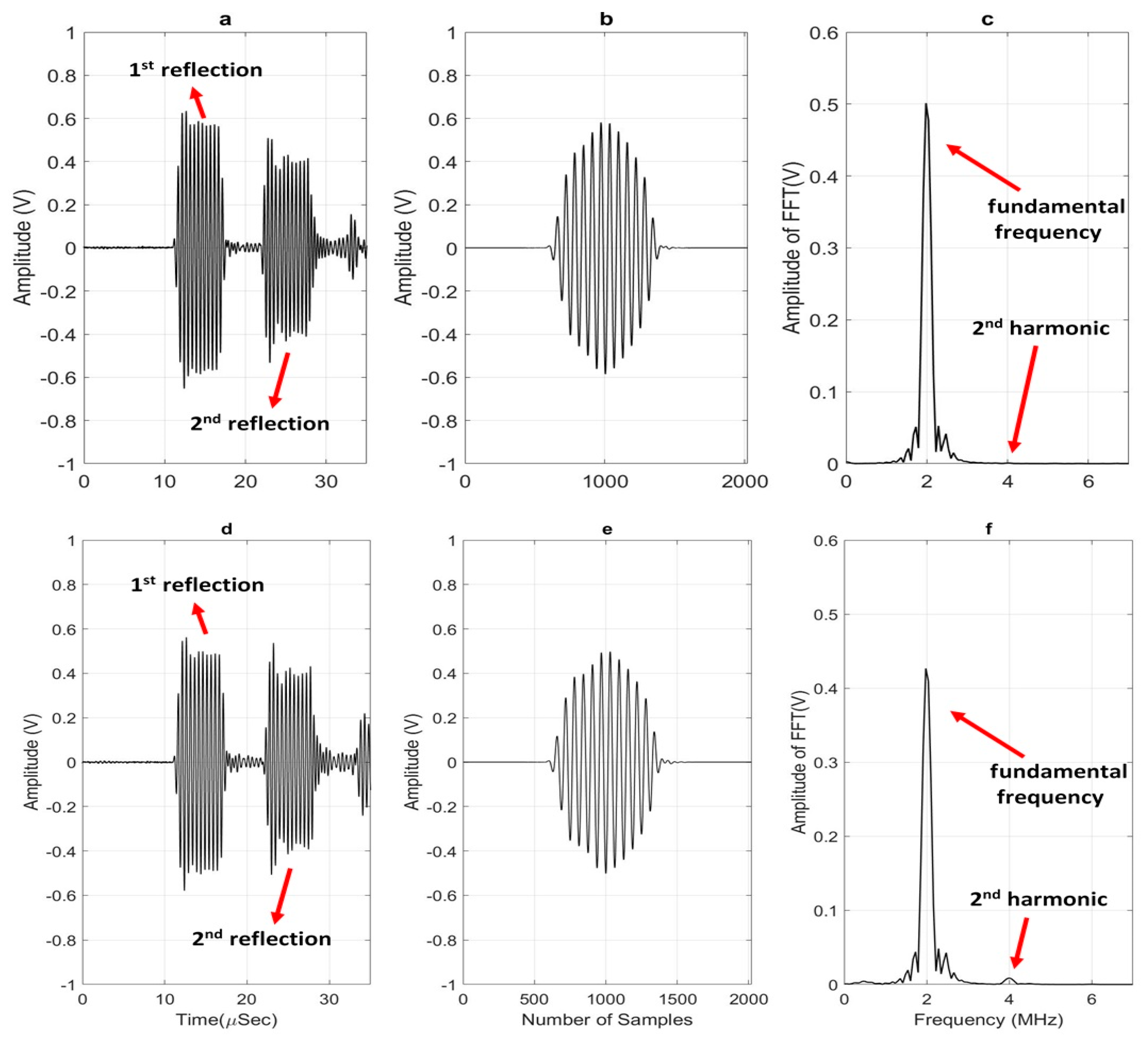
2.3.2. Incident and Reflected Elastic Waves
3. Experimental Approach
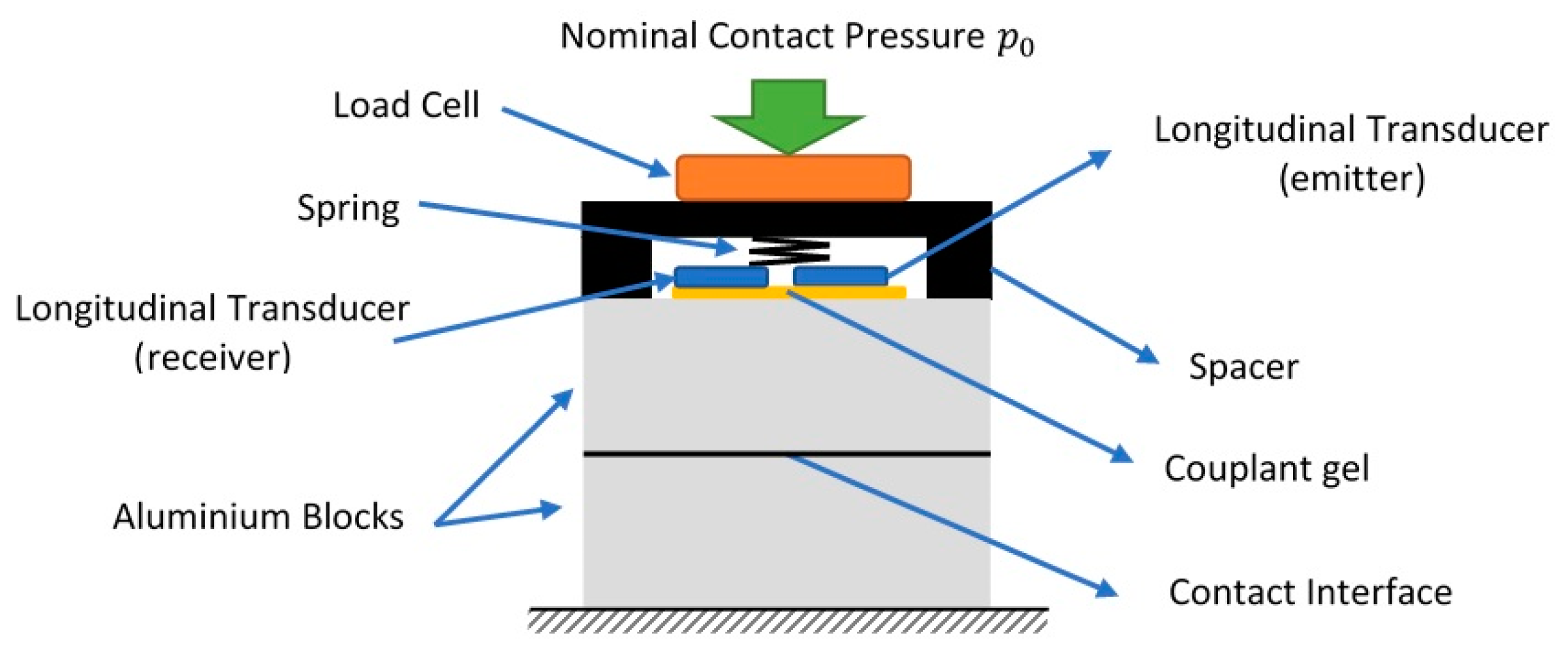
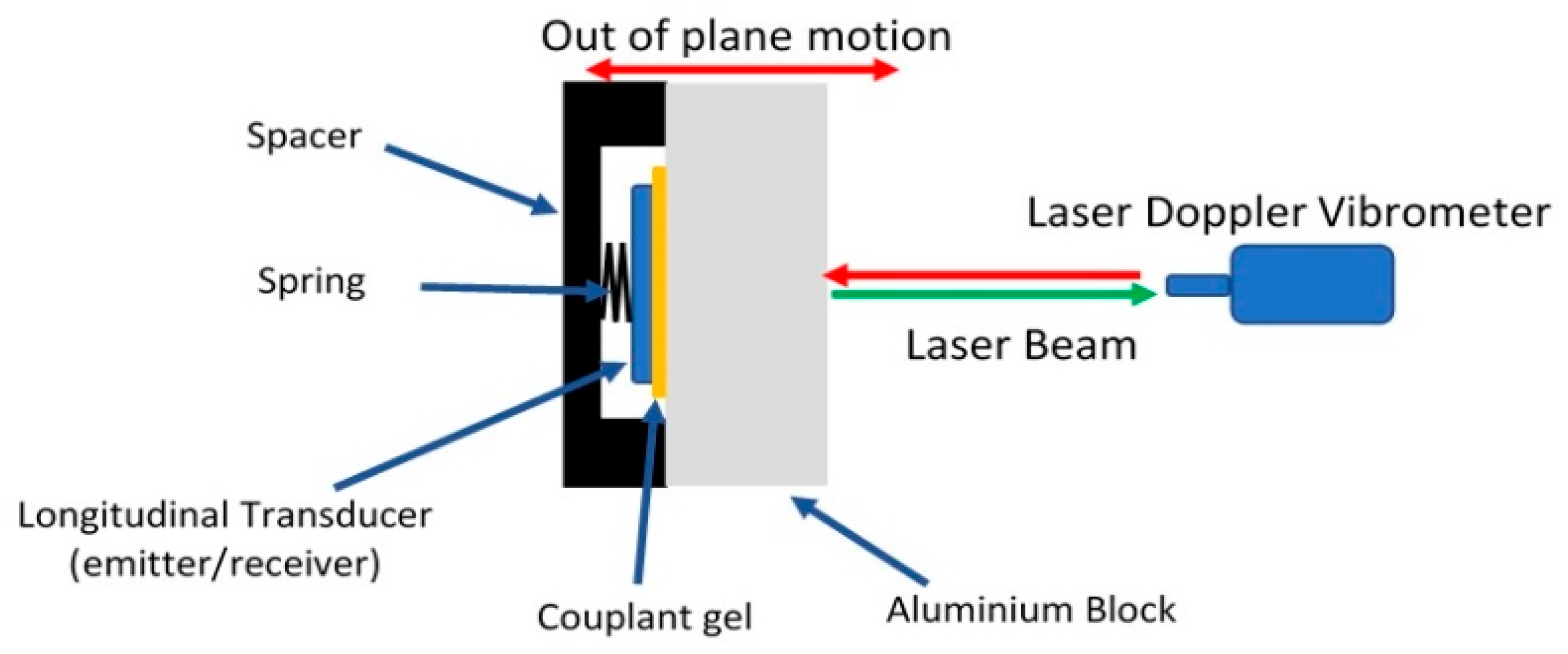
3.1. Loading Apparatus and Specimens
3.2. Instrumentation
3.3. Signal Processing
3.4. Voltage to Meter Conversion
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Amplitude of incident wave | |
| Amplitude of fundamental harmonic reflected pulse | |
| Amplitude of second harmonic reflected pulse | |
| Speed of sound | |
| Elastic modulus | |
| Incident ultrasonic wave | |
| Reflected ultrasonic wave | |
| Transmitted ultrasonic wave | |
| Rough surface mean line separation (surface separation) variation with time | |
| Equilibrium separation of the rough surface mean lines (m) | |
| Linear interfacial stiffness | |
| Second order nonlinear interfacial stiffness | |
| Total nominal contact pressure (summation of externally applied and applied by ultrasound) | |
| Nominal externally applied contact pressure (Pa) | |
| Reflection coefficient | |
| Displacement of ultrasonic wave | |
| Translational motion of the contact interface | |
| Relative surface approach (m) | |
| Imbedding parameter (Homotopy Perturbation Method). | |
| γ | Second order nonlinear parameter for reflected ultrasound |
| Voltage to amplitude (meter) conversion | |
| ν | Poisson’s ratio |
| Density of the media | |
| Normal stress (contact pressure) generated by the ultrasonic wave | |
| Angular frequency |
References
- Drinkwater, B.W.; Dwyer-Joyce, R.S.; Cawley, P. A study of the interaction between ultrasound and a partially contacting solid—Solid interface. Proc. R. Soc. A Math. Phys. Eng. Sci. 1996, 452, 2613–2628. [Google Scholar]
- Thomas, T.R.; Sayles, R.S. Stiffness of Machine Tool Joints: A Random-Process Approach. J. Eng. Ind. 1977, 99, 250–256. [Google Scholar] [CrossRef]
- Mindlin, R.D. Compliance of Elastic Bodies in Contact. J. Appl. Mech. 1949, 16, 259–268. [Google Scholar] [CrossRef]
- Greenwood, J.A.; Williamson, J.B.P. Contact of nominally flat surfaces. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1966, 295, 300–319. [Google Scholar]
- A Onions, R.; Archard, J.F. The contact of surfaces having a random structure. J. Phys. D Appl. Phys. 1973, 6, 289–304. [Google Scholar] [CrossRef]
- Whitehouse, D.J.; Archard, J.F. The properties of random surfaces of significance in their contact. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1970, 316, 97–121. [Google Scholar] [CrossRef] [Green Version]
- Bush, A.; Gibson, R.; Thomas, T. The elastic contact of a rough surface. Wear 1975, 35, 87–111. [Google Scholar] [CrossRef]
- Campana, C.; Persson, B.; Müser, M.H. Transverse and normal interfacial stiffness of solids with randomly rough surfaces. J. Phys. Condens. Matter 2011, 23, 085001. [Google Scholar] [CrossRef] [Green Version]
- Kartal, M.E.; Mulvihill, D.M.; Nowell, D.; Hills, D.A. Determination of the Frictional Properties of Titanium and Nickel Alloys Using the Digital Image Correlation Method. Exp. Mech. 2011, 51, 359–371. [Google Scholar] [CrossRef]
- De Crevoisier, J.; Swiergiel, N.; Champaney, L.; Hild, F. Identification of In Situ Frictional Properties of Bolted Assemblies with Digital Image Correlation. Exp. Mech. 2012, 52, 561–572. [Google Scholar] [CrossRef]
- Mulvihill, D.M.; Brunskill, H.; Kartal, M.E.; Dwyer-Joyce, R.S.; Nowell, D. A Comparison of Contact Stiffness Measurements Obtained by the Digital Image Correlation and Ultrasound Techniques. Exp. Mech. 2013, 53, 1245–1263. [Google Scholar] [CrossRef] [Green Version]
- Straffelini, G. Surfaces in Contact. In Materials with Internal Structure; Springer: Cham, Switzerland, 2015; Volume 20, pp. 1–20. [Google Scholar] [CrossRef]
- Chikate, P.; Basu, S. Contact stiffness of machine tool joints. Tribol. Int. 1975, 8, 9–14. [Google Scholar] [CrossRef]
- Handzel-Powierza, Z.; Klimczak, T.; Polijaniuk, A. On the experimental verification of the Greenwood-Williamson model for the contact of rough surfaces. Wear 1992, 154, 115–124. [Google Scholar] [CrossRef]
- Królikowski, J.; Szczepek, J. Prediction of contact parameters using ultrasonic method. Wear 1991, 148, 181–195. [Google Scholar] [CrossRef]
- Sherif, H.; Kossa, S. Relationship between normal and tangential contact stiffness of nominally flat surfaces. Wear 1991, 151, 49–62. [Google Scholar] [CrossRef]
- Sun, Y.; Xiao, H.; Xu, J. Investigation into the interfacial stiffness ratio of stationary contacts between rough surfaces using an equivalent thin layer. Int. J. Mech. Sci. 2019, 163, 105147. [Google Scholar] [CrossRef]
- Dwyer-Joyce, R.S.; Drinkwater, B.W.; Quinn, A.M. The Use of Ultrasound in the Investigation of Rough Surface Interfaces. J. Tribol. 2000, 123, 8–16. [Google Scholar] [CrossRef]
- Tattersall, H.G. The ultrasonic pulse-echo technique as applied to adhesion testing. J. Phys. D Appl. Phys. 1973, 6, 819. [Google Scholar] [CrossRef]
- Baik, J.-M.; Thompson, R.B. Ultrasonic scattering from imperfect interfaces: A quasi-static model. J. Nondestruct. Eval. 1984, 4, 177–196. [Google Scholar] [CrossRef]
- Dwyer-Joyce, R.S. The Application of Ultrasonic NDT Techniques in Tribology. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2005, 219, 347–366. [Google Scholar] [CrossRef] [Green Version]
- Biwa, S.; Hiraiwa, S.; Matsumoto, E. Experimental and theoretical study of harmonic generation at contacting interface. Ultrasonics 2006, 44, 1319–1322. [Google Scholar] [CrossRef] [PubMed]
- Biwa, S.; Suzuki, A.; Ohno, N. Evaluation of interface wave velocity, reflection coefficients and interfacial stiff-nesses of contacting surfaces. Ultrasonics 2005, 43, 495–502. [Google Scholar] [CrossRef]
- Kendall, K.; Tabor, D. An ultrasonic study of the area of contact between stationary and sliding surfaces. Proc. R. Soc. Lond. Ser. A Math. Phys. Sci. 1971, 323, 321–340. [Google Scholar]
- Gonzalez-Valadez, M.; Baltazar, A.; Dwyer-Joyce, R.S. Study of interfacial stiffness ratio of a rough surface in contact using a spring model. Wear 2010, 268, 373–379. [Google Scholar] [CrossRef] [Green Version]
- Biwa, S.; Hiraiwa, S.; Matsumoto, E. Pressure-Dependent Stiffnesses and Nonlinear Ultrasonic Response of Contacting Surfaces. J. Solid Mech. Mater. Eng. 2009, 3, 10–21. [Google Scholar] [CrossRef]
- Baltazar, A.; Rokhlin, S.I.; Pecorari, C. On the relationship between ultrasonic and micromechanical properties of contacting rough surfaces. J. Mech. Phys. Solids. 2002, 50, 1397–1416. [Google Scholar] [CrossRef]
- Krolikowski, J.; Szczepek, J.; Witczak, Z. Ultrasonic investigation of contact between solids under high hydrostatic pressure. Ultrason. 1989, 27, 45–49. [Google Scholar] [CrossRef]
- Yan, D.; Drinkwater, B.W.; Neild, S.A. Measurement of the ultrasonic nonlinearity of kissing bonds in adhesive joints. NDT E Int. 2009, 42, 459–466. [Google Scholar] [CrossRef]
- Rokhlin, S.I.; Wang, Y.J. Analysis of boundary conditions for elastic wave interaction with an interface between two solids. J. Acoust. Soc. Am. 1991, 89, 503–515. [Google Scholar] [CrossRef]
- Du, F.; Hong, J.; Xu, Y. An acoustic model for stiffness measurement of tribological interface using ultrasound. Tribol. Int. 2014, 73, 70–77. [Google Scholar] [CrossRef]
- Xiao, H.; Sun, Y. An improved virtual material based acoustic model for contact stiffness measurement of rough interface using ultrasound technique. Int. J. Solids Struct. 2018, 155, 240–247. [Google Scholar] [CrossRef]
- Breazeale, M.A.; Thompson, D.O. Finite-amplitude ultrasonic waves in aluminum. Appl. Phys. Lett. 1963, 3, 77–78. [Google Scholar] [CrossRef]
- Zabusky, N.J. Interpretation of the “stabilization distance” as evidence of weak shock formation in low-loss longitudinal nonlinear wave propagation experiments. Phys. Chem. Solids 1965, 26, 955–958. [Google Scholar] [CrossRef]
- Buck, O.; Morris, W.L.; Richardson, J.M. Acoustic harmonic generation at unbonded interfaces and fatigue cracks. Appl. Phys. Lett. 1978, 33, 371–373. [Google Scholar] [CrossRef]
- Severin, F.M.; Solodov, I.Y. Experimental Observation of Acoustic Demodulation in Reflection from a Solid-Solid Interface. Phys. Acoust. 1989, 35, 447–448. [Google Scholar]
- Ko, S.L.; Severin, F.M.; Solodov, I.Y. Experimental Observation of the Influence of Contact Nonlinearity on the Re-flection of Bulk Acoustic Waves and the Propagation of Surface Acoustic Waves. Sov. Phys. Acoust. 1991, 37, 610–612. [Google Scholar]
- Richardson, J.M. Harmonic generation at an unbonded interface—I. Planar interface between semi-infinite elastic media. Int. J. Eng. Sci. 1979, 17, 73–85. [Google Scholar] [CrossRef]
- Biwa, S.; Nakajima, S.; Ohno, N. On the Acoustic Nonlinearity of Solid-Solid Contact with Pressure-Dependent Interface Stiffness. J. Appl. Mech. 2004, 71, 508–515. [Google Scholar] [CrossRef]
- Hirose, S. 2-D scattering by a crack with contact-boundary conditions. Wave Motion 1994, 19, 37–49. [Google Scholar] [CrossRef]
- Jhang, K. Nonlinear Ultrasonic Techniques for Nondestructive Assessment of Micro Damage in Material: A review. Int. J. Precis. 2009, 10, 123–135. [Google Scholar]
- Budynas, R.G.; Nisbett, J.K.; Tangchaichit, K. Shigley’s Mechanical Engineering Design, 10th ed.; McGraw-Hill Education: New York, NY, USA, 2011. [Google Scholar]
- He, J.-H. Homotopy perturbation method: A new nonlinear analytical technique. Appl. Math. Comput. 2003, 135, 73–79. [Google Scholar] [CrossRef]
- Hurley, D.C.; Fortunko, C.M. Determination of the nonlinear ultrasonic parameter using a Michelson interferom-eter Determination of the nonlinear ultrasonic parameter β using a Michelson interferometer. Meas. Sci. Technol. 1997, 8, 634–642. [Google Scholar] [CrossRef]
- Blanloeuil, P.; Croxford, A.J.; Meziane, A. Numerical and experimental study of the nonlinear interaction between a shear wave and a frictional interface. J. Acoust. Soc. Am. 2014, 135, 1709–1716. [Google Scholar] [CrossRef]
- Li, X.; Dwyer-Joyce, R.S. Measuring friction at an interface using ultrasonic response. Proc. R. Soc. A Math. Phys. Eng. Sci. 2020, 476, 20200283. [Google Scholar] [CrossRef] [PubMed]
- Biwa, S.; Yamaji, S.; Matsumoto, E. Quantitative Evaluation of Harmonic Generation at Contacting Interface. AIP Conf. Proc. 2008, 1022, 505–508. [Google Scholar] [CrossRef]
- Shampine, L.F.; Reichelt, M.W. The MATLAB ODE Suite. SIAM J. Sci. Comput. 1997, 18, 1–22. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Process | |||
|---|---|---|---|
| Before loading/unloading | 0.446 | 0.577 | 3.092 |
| After 10 loading/unloading cycles | 0.404 | 0.522 | 2.745 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Taghizadeh, S.; Dwyer-Joyce, R.S. Linear and Nonlinear Normal Interface Stiffness in Dry Rough Surface Contact Measured Using Longitudinal Ultrasonic Waves. Appl. Sci. 2021, 11, 5720. https://doi.org/10.3390/app11125720
Taghizadeh S, Dwyer-Joyce RS. Linear and Nonlinear Normal Interface Stiffness in Dry Rough Surface Contact Measured Using Longitudinal Ultrasonic Waves. Applied Sciences. 2021; 11(12):5720. https://doi.org/10.3390/app11125720
Chicago/Turabian StyleTaghizadeh, Saeid, and Robert Sean Dwyer-Joyce. 2021. "Linear and Nonlinear Normal Interface Stiffness in Dry Rough Surface Contact Measured Using Longitudinal Ultrasonic Waves" Applied Sciences 11, no. 12: 5720. https://doi.org/10.3390/app11125720
APA StyleTaghizadeh, S., & Dwyer-Joyce, R. S. (2021). Linear and Nonlinear Normal Interface Stiffness in Dry Rough Surface Contact Measured Using Longitudinal Ultrasonic Waves. Applied Sciences, 11(12), 5720. https://doi.org/10.3390/app11125720