
Automatic Creation of Heuristic-Based Truck Movement Paths for Construction Equipment Control



Abstract
:1. Introduction
2. Earthwork Background
2.1. Earthwork in General
2.2. Soil Distribution Plan for a Road Construction
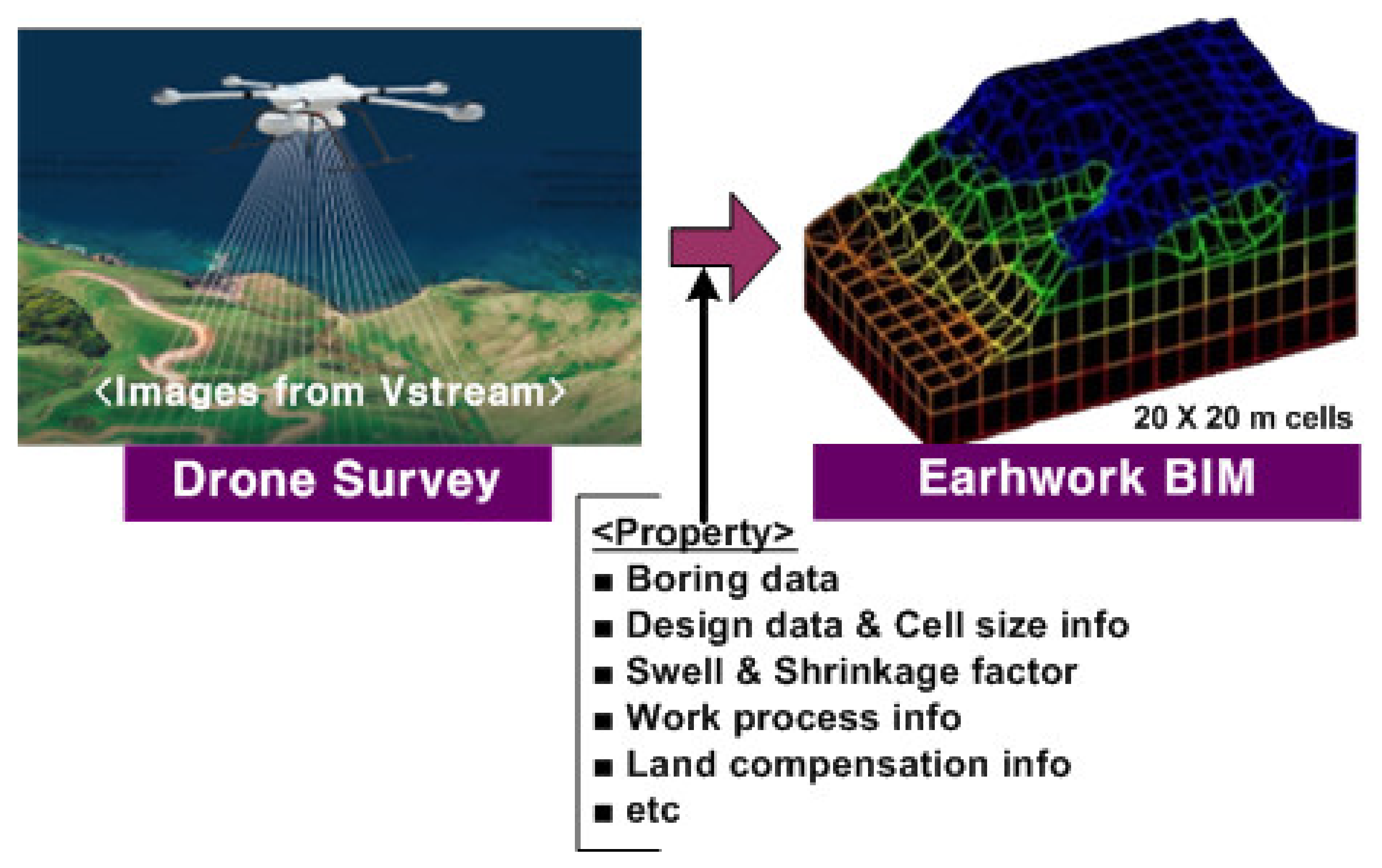
2.2.1. Earthwork BIM Model Formation
2.2.2. Dividing and Establishing Earthworks Plans for Only Available Areas in the Site
2.2.3. Task Packages and Provision of Transverse Soil Distribution Information
3. Construction Equipment (Truck) Movement Path Creation
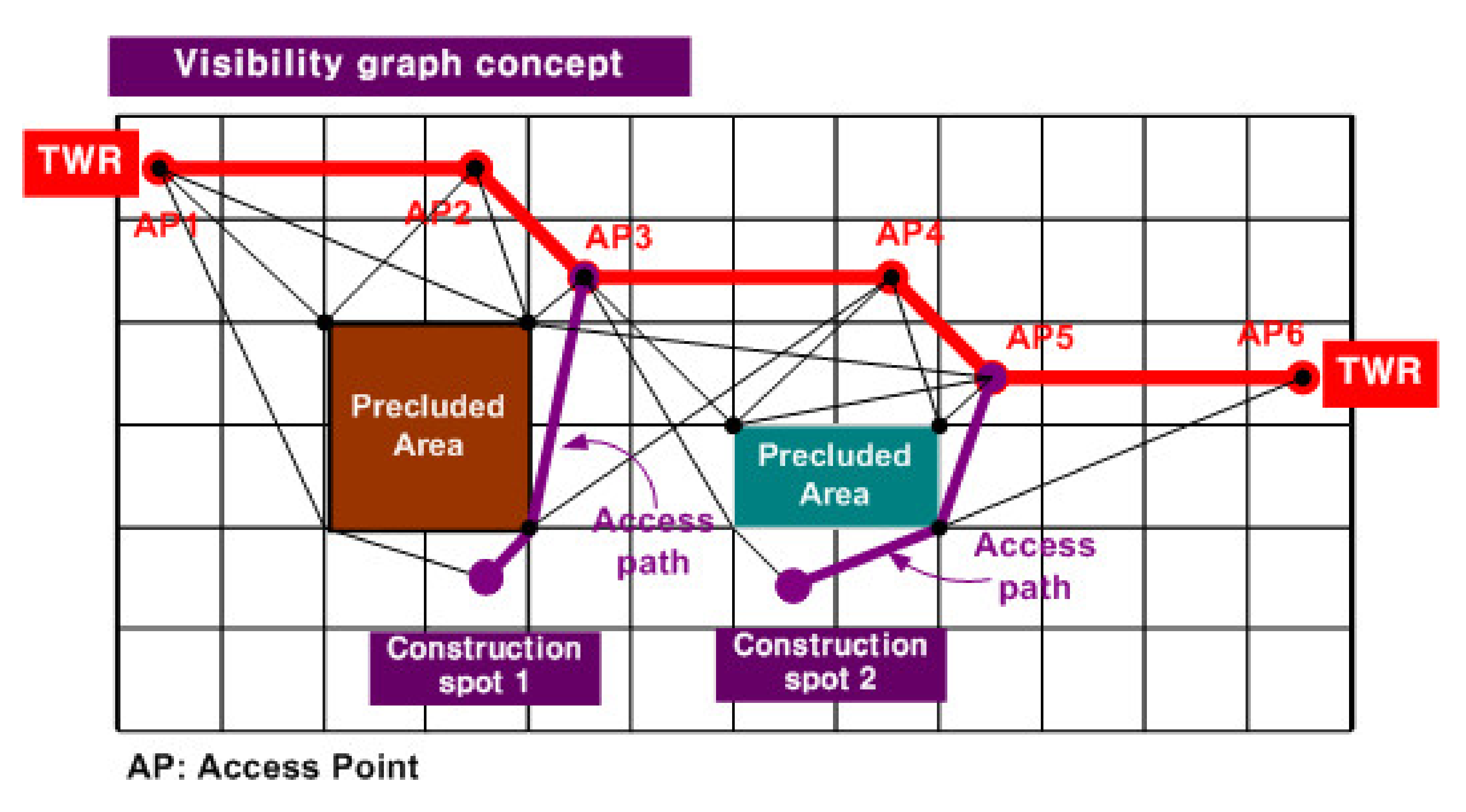
3.1. Heuristic Investigation for Generating Temporary Work Roads
3.2. How to Create an Optimal Temporary Road in the Field
- 1.
- Distance to the end cell: DE
- 2.
- Work volume (WV)
- 3.
- Gradient (G)
- 4.
- Distance to the structure (DS)
- 5.
- Distance to the source of civil complaints: DC
- SPLt: Composite noise level of input equipment (dB(A));
- SPLi: Individual noise level of input equipment (dB(A));
- SPL1: Equipment noise level at the predicted point (dB(A));
- SPL0: Noise level (dB(A)) at a certain distance (7.5 m, 15 m) from the noise source;
- r: Distance from the noise source to the predicted point;
- r0: Distance from the noise source to the reference measurement point.
- (1)
- When the location of the entry/exit in the site is changed;
- (2)
- When the length of the temporary road can be shortened because the site is newly accommodated;
- (3)
- When the contract for the leased site has expired and the site cannot be used;
- (4)
- When the construction of the structure is completed and there is no need to enter the area;
- (5)
- In case the position of the temporary road needs to be adjusted due to a civil complaint;
- (6)
- In case of flooding during the rainy season or loss due to natural disasters;
- (7)
- In case of conflict with other construction (for example, the start of new construction along the road’s route, etc.);
- (8)
- When a new bridge or tunnel is completed and it is possible to pass through.
3.3. Creating a Truck Path
4. Case Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Venugopal, M. Construction Fatalities in the United States between 2009–2018. Int. J. Res. Appl. Sci. Eng. Technol. 2020, 8, 1129–1133. [Google Scholar] [CrossRef]
- Son, T.H. From Constructing the Team to Construction 2025. CERIK Q. Rep. Summer CERIK 2016, 49–52. [Google Scholar]
- Cho, J.Y. Strategies and Implication of Japanese Construction Industry in the 4th Industrial Revolution. In Constriction Policy Review Report 2017-03; Korea Research Institute for Construction Policy: Seoul, Korea, 2017; Volume 3. [Google Scholar]
- National Archives of Singapore 2nd Construction Productivity Roadmap Media Factsheet. Available online: http://www.nas.gov.sg/archivesonline/data/pdfdoc/20170307002/ (accessed on 9 June 2021).
- de Soto, B.G.; Skibniewski, M.J. Future of robotics and automation in construction. In Construction 4.0: An Innovation Platform for the Built Environment; Routledge: Abingdon, UK, 2020; pp. 289–306. [Google Scholar]
- Chen, Q.; de Soto, B.G.; Adey, B.T. Construction automation: Research areas, industry concerns and suggestions for advancement. Autom. Constr. 2018, 94, 22–38. [Google Scholar] [CrossRef]
- Heikkilä, R.; Makkonen, T.; Niskanen, I.; Immonen, M.; Hiltunen, M.; Kolli, T.; Tyni, P. Development of an Earthmoving Machinery Autonomous Excavator Development Platform. ISARC. Proc. Int. Symp. Autom. Robot. Constr. 2019, 36, 1005–1010. [Google Scholar]
- Kim, Y.S.; Oh, S.W.; Cho, Y.K.; Seo, J.W. A PDA and wireless web integrated system for quality inspection and defect management of apartment housing projects. Autom. Constr. 2008, 17, 163–179. [Google Scholar] [CrossRef]
- Kimoto, K.; Endo, K.; Iwashita, S.; Fujiwara, M. The application of PDA as a mobile computing system on construction management. Autom. Constr. 2005, 14, 500–511. [Google Scholar] [CrossRef]
- Choi, Y.; Kim, Y. Applications of Smart Helmet in Applied Sciences: A Systematic Review. Appl. Sci. 2021, 11, 5039. [Google Scholar] [CrossRef]
- Ahmed, N.; Hong, A.J.; Ku, H.; Moon, S.; Moon, S. Technical review of automated system application to earthworks in Australia. Proc. Int. Symp. Autom. Robot. Constr. 2017, 34, 594–601. [Google Scholar]
- Schimanski, C.P.; Marcher, C.; Toller, G.; Monizza, G.P.; Matt, D.T. Enhancing Automation in the Construction Equipment Industry Through Implementation of BIM. In Proceedings of the International Conference on Cooperative Design, Visualization and Engineering, Mallorca, Spain, 6–9 October 2019; pp. 64–73. [Google Scholar]
- Prasad, K.N.; Agrawal, V.M. Automation and Robotics in the Construction Industry-a Review. I Manag. J. Future Eng. Technol. 2019, 14, 49. [Google Scholar]
- Li, R.Y.M. Smart construction safety in road repairing works. Procedia Comput. Sci. 2017, 111, 301–307. [Google Scholar] [CrossRef]
- Jiang, W.; Ding, L.; Zhou, C. Cyber physical system for safety management in smart construction site. Eng. Constr. Archit. Manag. 2020, 28, 788–808. [Google Scholar] [CrossRef]
- Hammad, A.; Vahdatikhaki, F.; Zhang, C.; Mawlana, M.; Doriani, A. Towards the smart construction site: Improving productivity and safety of construction projects using multi-agent systems, real-time simulation and automated machine control. In Proceedings of the 2012 Winter Simulation Conference (WSC) IEEE, Berlin, Germany, 9–12 December 2012; pp. 1–12. [Google Scholar]
- Schweigkofler, A.; Monizza, G.P.; Domi, E.; Popescu, A.; Ratajczak, J.; Marcher, C.; Matt, D. Development of a digital platform based on the integration of augmented reality and BIM for the management of information in construction processes. In Proceedings of the IFIP International Conference on Product Lifecycle Management, Turin, Italy, 8 December 2018; Springer: Cham, Switzerland, 2018; pp. 46–55. [Google Scholar]
- Kim, H.; Chen, Z.; Cho, C.S.; Moon, H.; Ju, K.; Choi, W. Integration of BIM and GIS: Highway cut and fill earthwork balancing. Comput. Civ. Eng. 2015, 2015, 468–474. [Google Scholar]
- Park, T.S.; Park, H.S. The Current Status and Facilitation Strategy of BIM for Civil Infrastructure Projects. J. Korean Soc. Civ. Eng. 2015, 38, 133–140. [Google Scholar]
- Kim, H.; Kim, J.; Seo, J.; Shim, H. The Improvement of Point Cloud Data Processing Program for Efficient Earthwork BIM Design. Korean J. Constr. Eng. Manag. 2020, 21, 55–63. [Google Scholar]
- Kim, S.K.; Lee, J.B.; Kim, Y.S. A Study on Core Technologies and Technological Innovation Strategies for Construction Automation. J. Korean Soc. Civ. Eng. 2004, 24, 795–803. [Google Scholar]
- Lim, S.Y.; Kim, S.K. Productivity analysis using a Fleet Management System for Construction Equipment. J. Korean Soc. Civ. Eng. 2020, 40, 587–595. [Google Scholar]
- Easa, S.M. Earthwork allocations with linear unit costs. J. Constr. Eng. Manag. 1988, 114, 641–655. [Google Scholar] [CrossRef]
- Jayawardane, A.; Harris, F. Further development of integer programming in earthwork optimization. J. Constr. Eng. Manag. 1990, 116, 18–34. [Google Scholar] [CrossRef]
- Lee, C.K.; Kim, S.K.; Sung, Y.J. A Study on 2D-Based Earthwork Planning Methods. KSCE J. Civ. Eng. 2003, 23, 349–357. [Google Scholar]
- Kang, T.W.; Cho, Y.H. The Study on the Optimized Earthwork Transfer Path Algorithm Considering the Precluded Area of Massive Cutting and Banking. J. Korean Soc. Road Eng. 2011, 13, 1–8. [Google Scholar]
- Guden, H.; Sural, H. A polynomial algorithm for the earthwork allocation problem with borrow and waste site selection. J. Oper. Res. Soc. 2016, 68, 1085–1093. [Google Scholar] [CrossRef]
- Ji, M.G.; Park, J.K.; Kim, D.H.; Jung, Y.H.; Park, J.K. Earthwork Planning via Reinforcement Learning with Heterogeneous Construction Equipment. J. Korea Soc. Simul. 2018, 27, 1–13. [Google Scholar]
- Sokkia Korea Positioning Instruments Catalog. Available online: https://www.sokkia.co.kr/default/1004web/dd/d08.php (accessed on 9 June 2021).
- Trimble Earthworks Grade Control Platform. Available online: https://construction.trimble.com/earthworks (accessed on 9 June 2021).
- Kim, S.K.; Seo, J.; Russell, J.S. Intelligent navigation strategies for an automated earthwork system. Autom. Constr. 2012, 21, 132–147. [Google Scholar] [CrossRef]
- Kim, S.K.; Lim, S.Y. A Study on the Improvement of a Fleet Management System for Construction Equipment. J. Korean Soc. Civ. Eng. 2017, 37, 1063–1076. [Google Scholar]
- Smart Construction Tech Research Group. Integrated Fleet Management and Smart Construction Technology in the 4th Industrial Revolution. Available online: https://www.youtube.com/watch?v=frPgTe59YVc (accessed on 9 June 2021).
- Kim, S.K.; Russell, J.S. Framework for an intelligent earthwork system. Part II. Task identification/scheduling and resource allocation methodology. Autom. Constr. 2003, 12, 15–27. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Important Factors | |
|---|---|
| Temporary road design criteria |
|
| Temporary road location selection |
|
| Classification | DE | G | WV | DC | DS | Weight |
|---|---|---|---|---|---|---|
| DE | 1 | 3.5 | 3 | 2.556 | 3 | 0.42 |
| G | 0.286 | 1 | 1.417 | 0.778 | 0.931 | 0.12 |
| WV | 0.333 | 0.706 | 1 | 1.083 | 1.25 | 0.14 |
| DC | 0.391 | 1.286 | 0.923 | 1 | 1.667 | 0.17 |
| DS | 0.333 | 1.075 | 0.800 | 0.600 | 1 | 0.15 |
| Element | Case | Cost | |
|---|---|---|---|
| DE | Max distance (MaxDE) from surrounding cells of the current cell to the end cell | 1 | |
| Others | |||
| WV | Cut | Max cut volume (MCV) among surrounding cells | 1 |
| Others | |||
| Fill | {Max fill volume (MFV) among surrounding cells} × (1/C) C: Soil shrink factor | 1 | |
| Others | |||
| Cut + Fill (Mixed) | Max mixed volume (MMV) among surrounding cells Mixed volume = |Cut vol—{Fill vol ×(1/C)}| C: Soil shrink factor | 1 | |
| Others | |||
| G | Slope 20°~30° | 1 | |
| Slope 10°~20° | 0.5 | ||
| Slope 0°~10° | 0 | ||
| DS | Max Distance (MaxDS) from surrounding cells of the current cell to a main structure | 1 | |
| Others | |||
| DC | Within 85 m | 1 | |
| 85~130 m | 0.7 | ||
| 130~180 m | 0.35 | ||
| Over 180 m | 0 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.-K.; Jang, J.-W.; Na, W.S. Automatic Creation of Heuristic-Based Truck Movement Paths for Construction Equipment Control. Appl. Sci. 2021, 11, 5837. https://doi.org/10.3390/app11135837
Kim S-K, Jang J-W, Na WS. Automatic Creation of Heuristic-Based Truck Movement Paths for Construction Equipment Control. Applied Sciences. 2021; 11(13):5837. https://doi.org/10.3390/app11135837
Chicago/Turabian StyleKim, Sung-Keun, Jung-Woo Jang, and Wongi S. Na. 2021. "Automatic Creation of Heuristic-Based Truck Movement Paths for Construction Equipment Control" Applied Sciences 11, no. 13: 5837. https://doi.org/10.3390/app11135837
APA StyleKim, S.-K., Jang, J.-W., & Na, W. S. (2021). Automatic Creation of Heuristic-Based Truck Movement Paths for Construction Equipment Control. Applied Sciences, 11(13), 5837. https://doi.org/10.3390/app11135837