
Analysis of Seismic Wavefield Characteristics in 3D Tunnel Models Based on the 3D Staggered-Grid Finite-Difference Scheme in the Cylindrical Coordinate System

 ,
,
Abstract
:1. Introduction
2. Methods
2.1. The 3D Decoupled Nonconversion Elastic Wave Equation in the Cylindrical Coordinate System
2.2. Stability Conditions and Absorbing Boundary Conditions
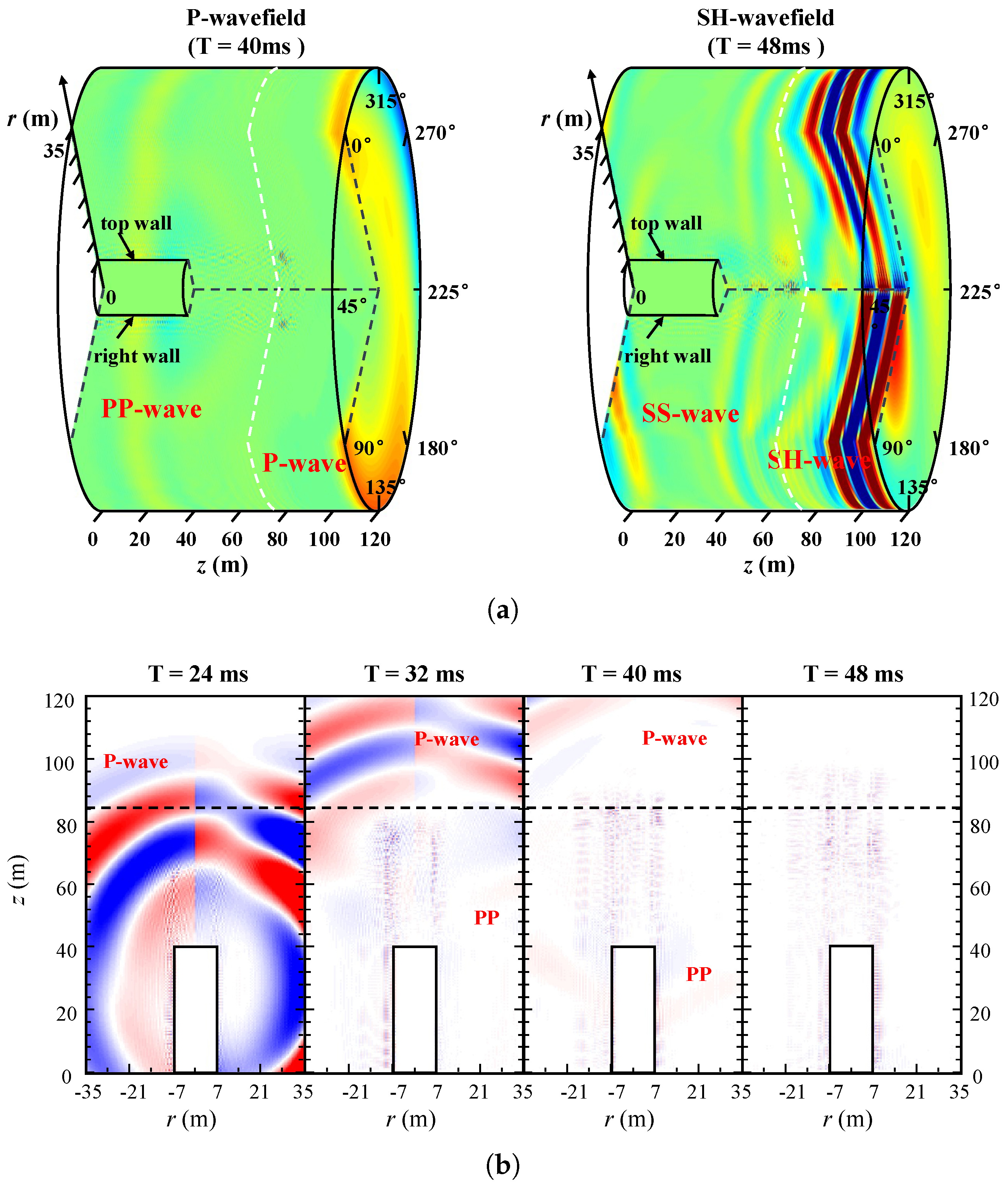
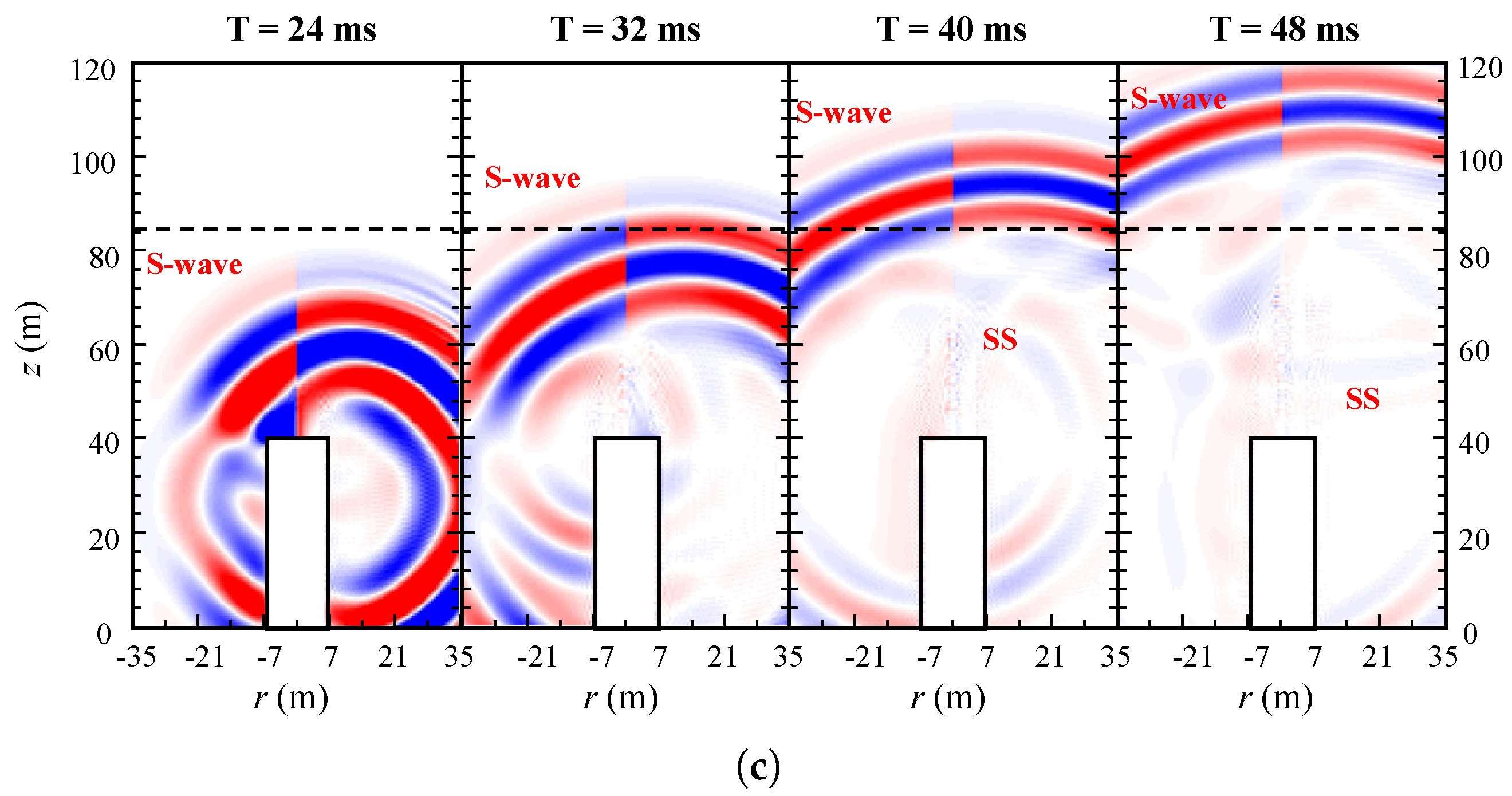
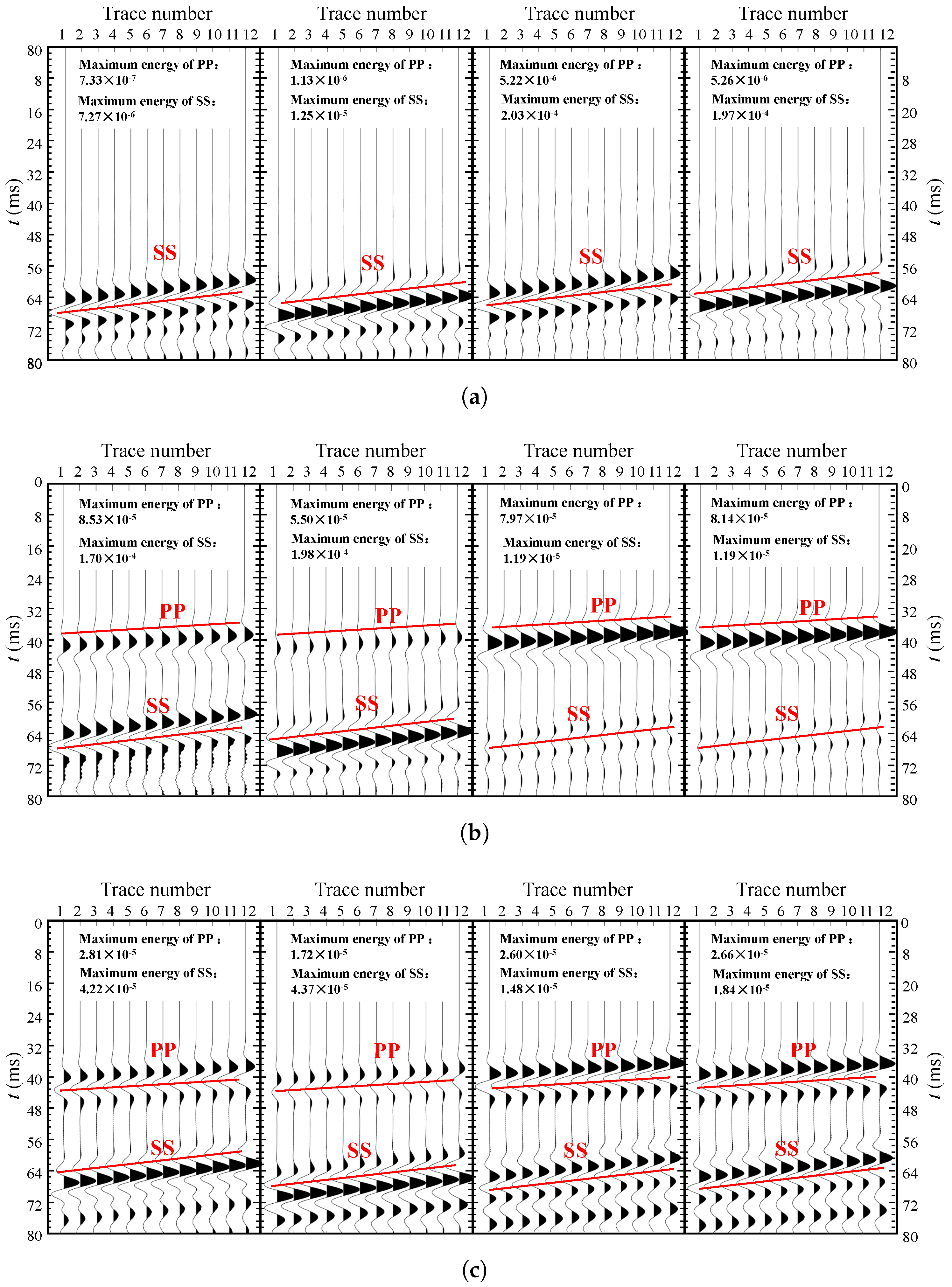
3. Numerical Experiment
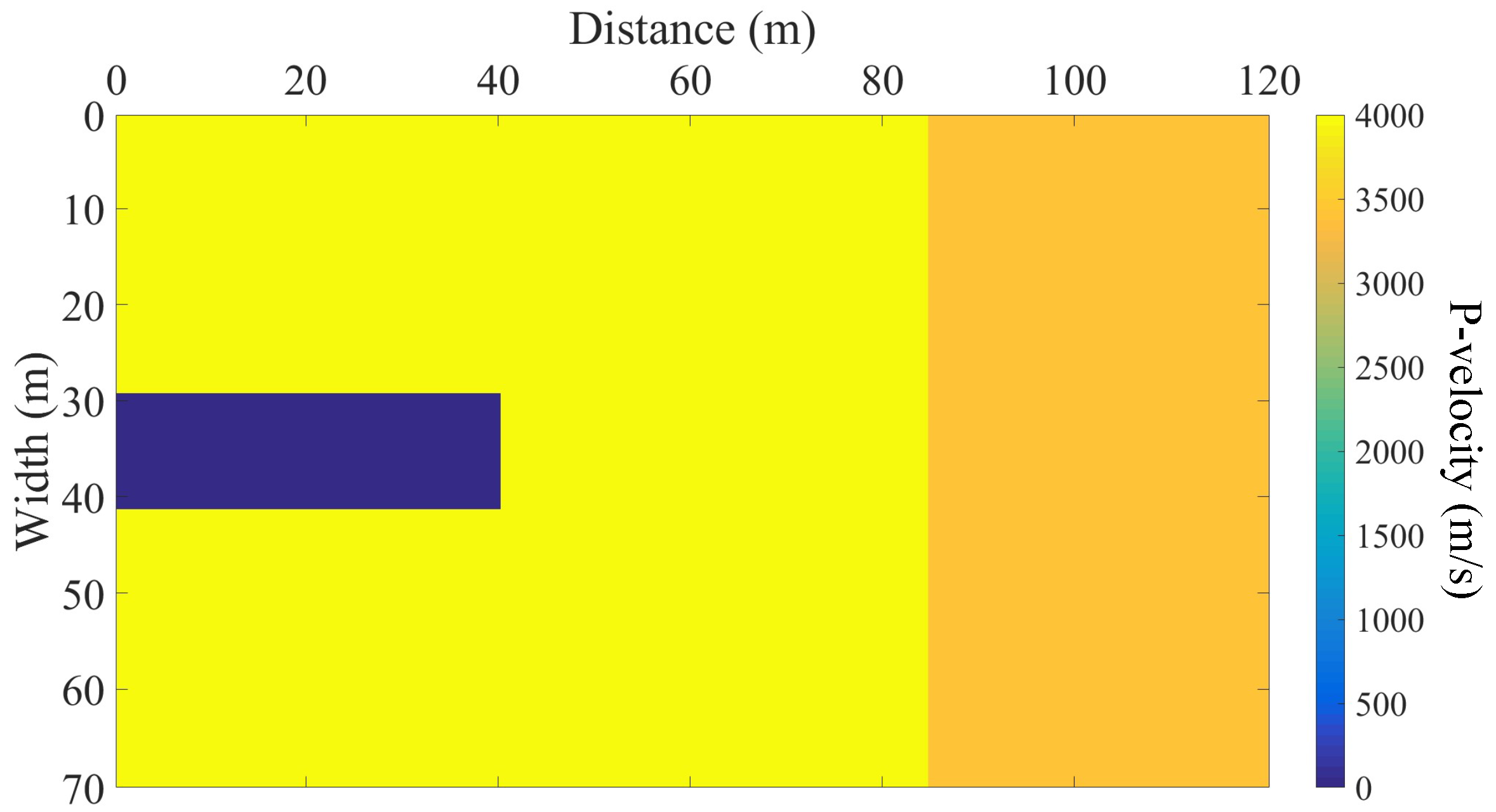
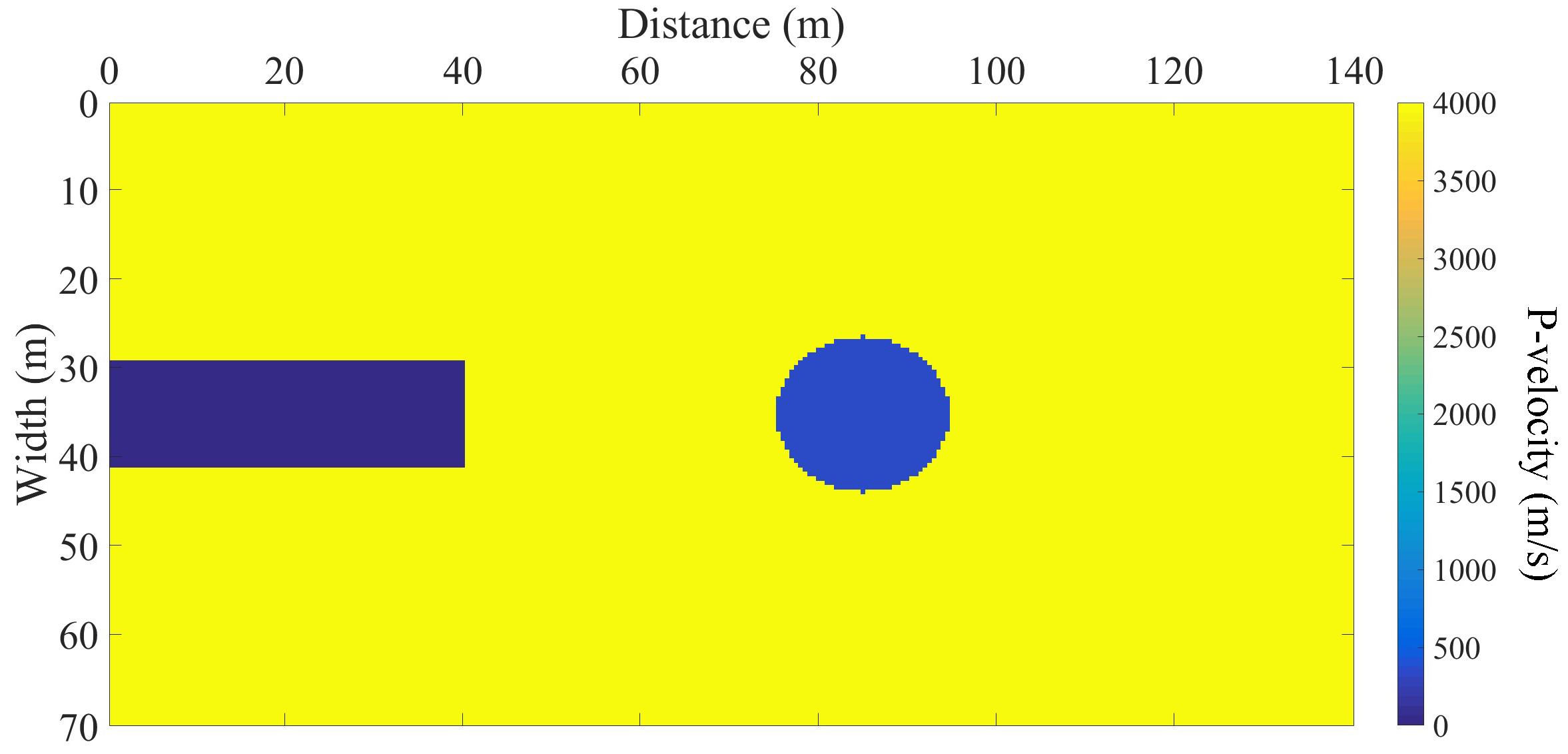
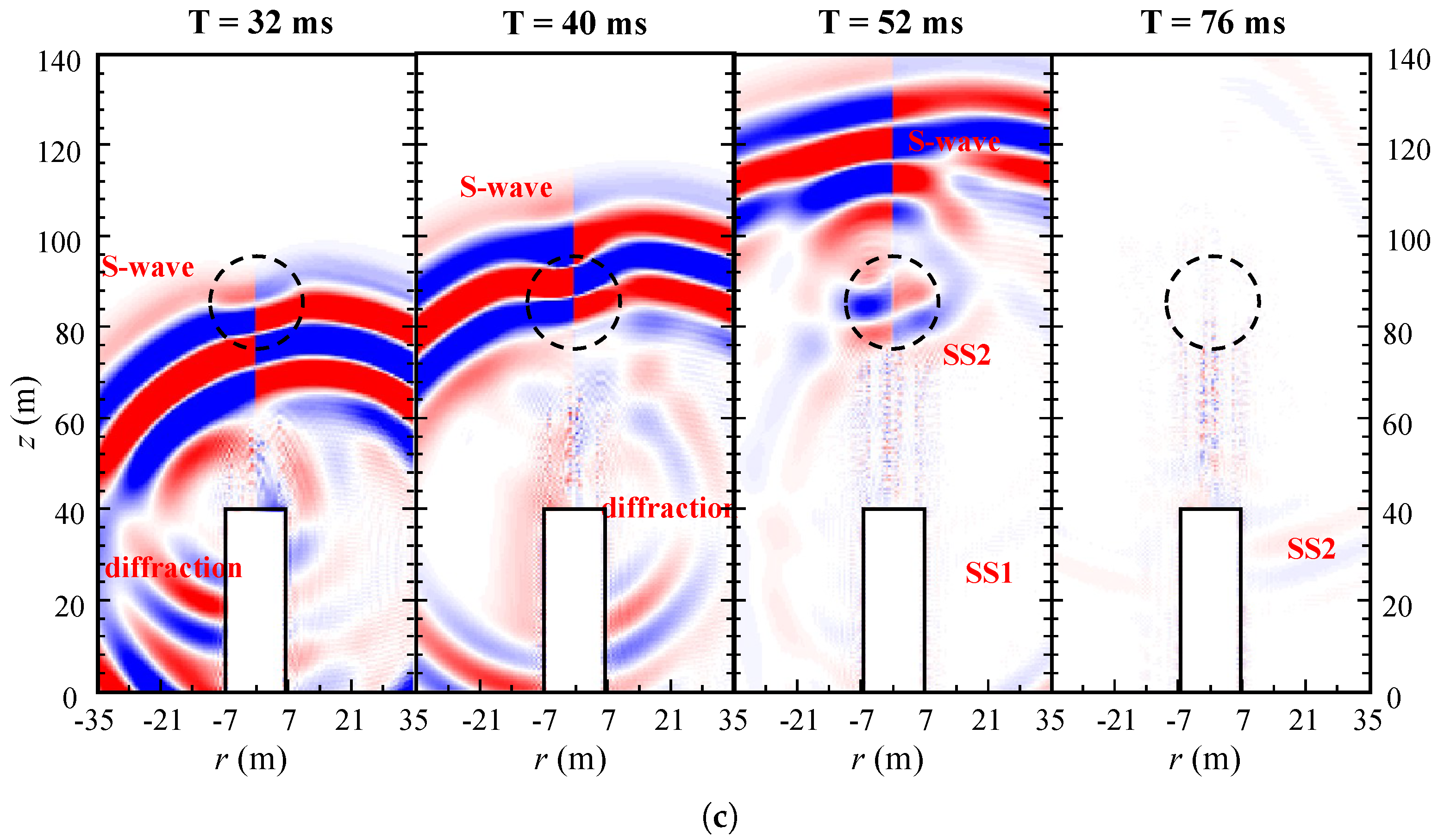
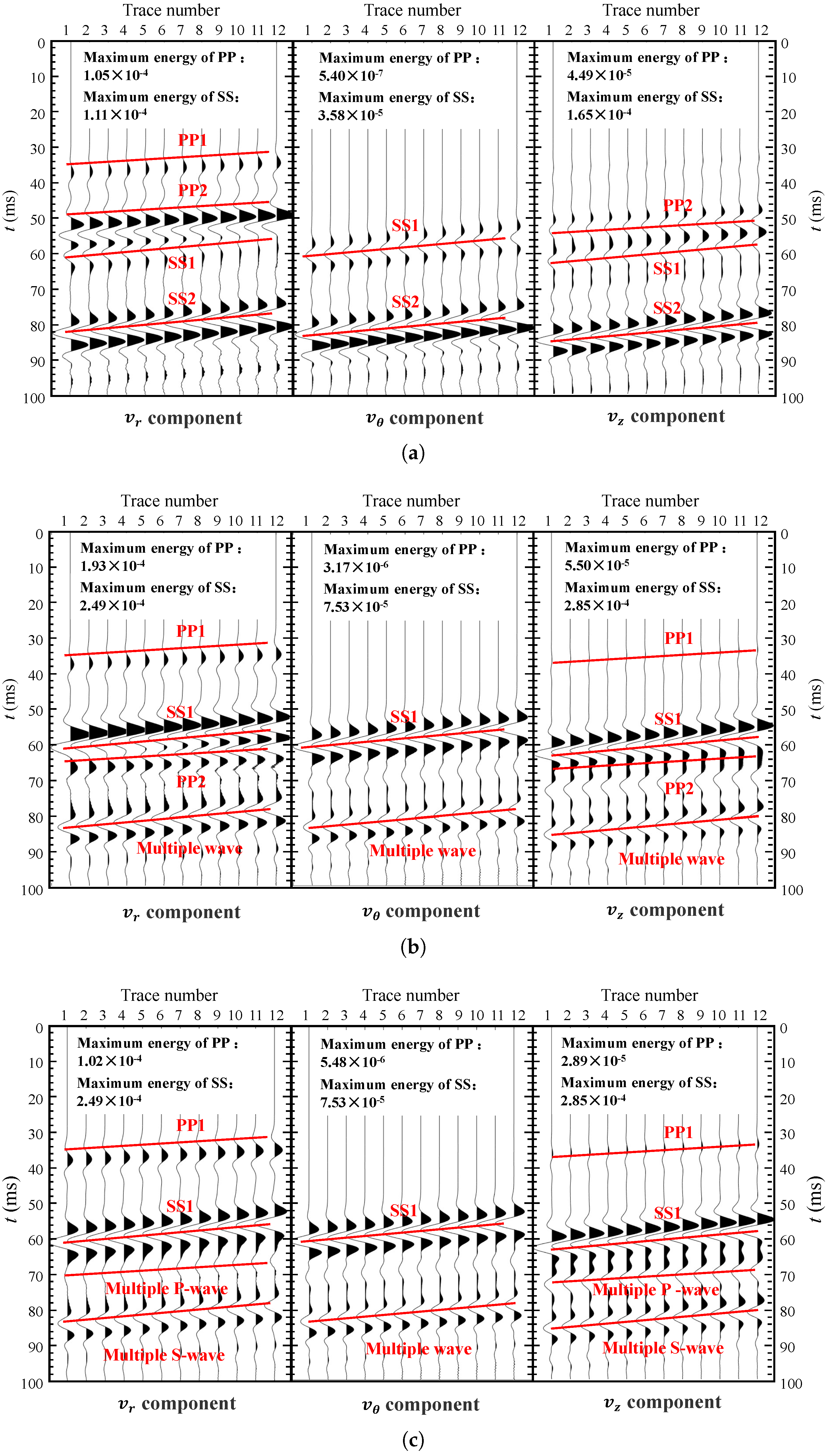
3.1. Single Vertical Geological Interface Model
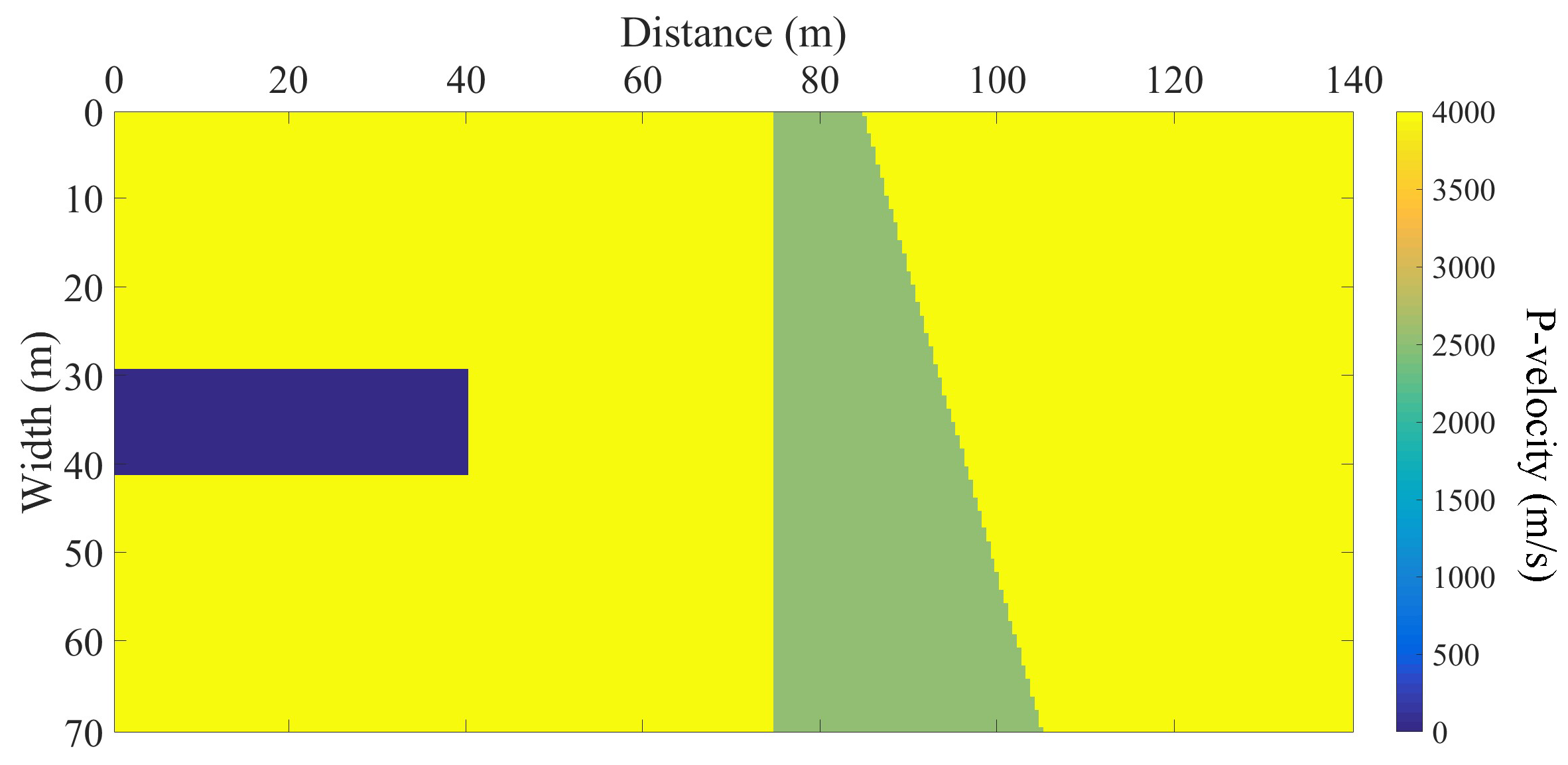
3.2. Wedge-Shaped Fault Model
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, S.; Liu, B.; Xu, X.; Nie, L.; Liu, Z.; Song, J.; Sun, H.; Chen, L.; Fan, K. An overview of ahead geological prospecting in tunneling. Tunn. Undergr. Space Technol. 2017, 63, 69–94. [Google Scholar] [CrossRef]
- Sanchez-Salinero, I.; Roesset, J.M.; Stokoe, I.; Kenneth, H. Analytical Studies of Body Wave Propagation and Attenuation; Report GR 86-15; Texas Univ at Austin Geotechnical Engineering Center: Austin, TX, USA, 1986. [Google Scholar]
- Byun, J.; Toksöz, M.N. Analysis of the acoustic wavefields excited by the logging-while-drilling (LWD) tool. Geosyst. Eng. 2003, 6, 19–25. [Google Scholar] [CrossRef]
- Raji, W.O.; Gao, Y.; Harris, J.M. Wavefield analysis of crosswell seismic data. Arab. J. Geosci. 2017, 10, 217. [Google Scholar] [CrossRef]
- Fu, X.; Sheng, Q.; Zhang, Y.; Chen, J. Time-frequency analysis of seismic wave propagation across a rock mass using the discontinuous deformation analysis method. Int. J. Geomech. 2017, 17, 04017024. [Google Scholar] [CrossRef]
- Li, G.; Xiong, J.; Zhou, H.; Zhai, T. Seismic reflection characteristics of fluvial sand and shale interbedded layers. Appl. Geophys. 2008, 5, 219–229. [Google Scholar] [CrossRef]
- Liu, H.; Sen, M.K.; Spikes, K.T. 3D simulation of seismic-wave propagation in fractured media using an integral method accommodating irregular geometries. Geophysics 2018, 83, WA121–WA136. [Google Scholar] [CrossRef]
- Liu, T.T.; Han, L.G.; Ge, Q.X. Numerical simulation of the seismic wave propagation and fluid pressure in complex porous media at the mesoscopic scale. Waves Random Complex Media 2021, 31, 207–227. [Google Scholar] [CrossRef]
- Cho, Y.; Gibson, R.L., Jr.; Vasilyeva, M.; Efendiev, Y. Generalized multiscale finite elements for simulation of elastic-wave propagation in fractured media. Geophysics 2018, 83, WA9–WA20. [Google Scholar] [CrossRef]
- Wang, X.; Cai, M. Numerical modeling of seismic wave propagation and ground motion in underground mines. Tunn. Undergr. Space Technol. 2017, 68, 211–230. [Google Scholar] [CrossRef]
- Liu, C.; Peng, L.M.; Lei, M.F.; Li, Y.F. Research on crossing tunnels’ seismic response characteristics. KSCE J. Civ. Eng. 2019, 23, 4910–4920. [Google Scholar] [CrossRef]
- Alterman, Z.; Karal, F., Jr. Propagation of elastic waves in layered media by finite difference methods. Bull. Seismol. Soc. Am. 1968, 58, 367–398. [Google Scholar]
- Virieux, J. SH-wave propagation in heterogeneous media: Velocity-stress finite-difference method. Geophysics 1984, 49, 1933–1942. [Google Scholar] [CrossRef]
- Graves, R.W. Simulating seismic wave propagation in 3D elastic media using staggered-grid finite differences. Bull. Seismol. Soc. Am. 1996, 86, 1091–1106. [Google Scholar]
- Xie, G.; Li, J.; Xie, F. 2.5 D AGILD electromagnetic modeling and inversion. PIERS Online 2006, 2, 390–394. [Google Scholar] [CrossRef]
- Hong, R.T.; Huang, Z.Y.; Shi, L.H.; Sun, Z. A Paralleling-in-Order Unconditionally Stable AH FDTD in Cylindrical Coordinates System. IEEE Microw. Wirel. Compon. Lett. 2017, 27, 1041–1043. [Google Scholar] [CrossRef]
- Liu, Q.H.; Sinha, B.K. Multipole acoustic waveforms in fluid-filled boreholes in biaxially stressed formations: A finite-difference method. Geophysics 2000, 65, 190–201. [Google Scholar] [CrossRef]
- Pissarenko, D.; Reshetova, G.; Tcheverda, V. 3D finite-difference synthetic acoustic log in cylindrical coordinates. J. Comput. Appl. Math. 2010, 234, 1766–1772. [Google Scholar] [CrossRef] [Green Version]
- Toyokuni, G.; Takenaka, H. FDM computation of seismic wavefield for an axisymmetric earth with a moment tensor point source. Earth Planets Space 2006, 58, e29–e32. [Google Scholar] [CrossRef] [Green Version]
- Luo, S.; Lu, G.; Zhu, Z.; Shi, K.; Xia, C. Full wave filed numerical simulation of karst caves in tunnel space based on cylindrical coordinate system. Prog. Geophys. 2020, 35, 1175. [Google Scholar]
- Anderson, D.L. Elastic wave propagation in layered anisotropic media. J. Geophys. Res. 1961, 66, 2953–2963. [Google Scholar] [CrossRef] [Green Version]
- Dezhong, Y. A research on reflection and conversion characteristics of several elastic wave recursion equations. Oil Geophys. Prospect. 1996, 4, 467–475. [Google Scholar]
- Liu, Q.H.; Sinha, B.K. A 3D cylindrical PML/FDTD method for elastic waves in fluid-filled pressurized boreholes in triaxially stressed formations. Geophysics 2003, 68, 1731–1743. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Medium | (kg/m) | (m/s) | (m/s) |
|---|---|---|---|
| Surrounding rock | 2000 | 4000 | 2300 |
| Soft soil | 1800 | 2500 | 1700 |
| Water | 1000 | 1500 | 0 |
| Air | 1.0 | 340 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zuo, Z.; Li, D.; Zhou, P.; Lin, C.; Yang, Z.; Xu, X.; Zhang, L.; Wang, J. Analysis of Seismic Wavefield Characteristics in 3D Tunnel Models Based on the 3D Staggered-Grid Finite-Difference Scheme in the Cylindrical Coordinate System. Appl. Sci. 2021, 11, 5854. https://doi.org/10.3390/app11135854
Zuo Z, Li D, Zhou P, Lin C, Yang Z, Xu X, Zhang L, Wang J. Analysis of Seismic Wavefield Characteristics in 3D Tunnel Models Based on the 3D Staggered-Grid Finite-Difference Scheme in the Cylindrical Coordinate System. Applied Sciences. 2021; 11(13):5854. https://doi.org/10.3390/app11135854
Chicago/Turabian StyleZuo, Zhiwu, Duo Li, Pengfei Zhou, Chunjin Lin, Zhichao Yang, Xinji Xu, Lingli Zhang, and Jiansen Wang. 2021. "Analysis of Seismic Wavefield Characteristics in 3D Tunnel Models Based on the 3D Staggered-Grid Finite-Difference Scheme in the Cylindrical Coordinate System" Applied Sciences 11, no. 13: 5854. https://doi.org/10.3390/app11135854