Implementation of Adaptive Real-Time Camouflage System in Visible-Light Band


Abstract
:Featured Application
Abstract
1. Introduction
2. Methods
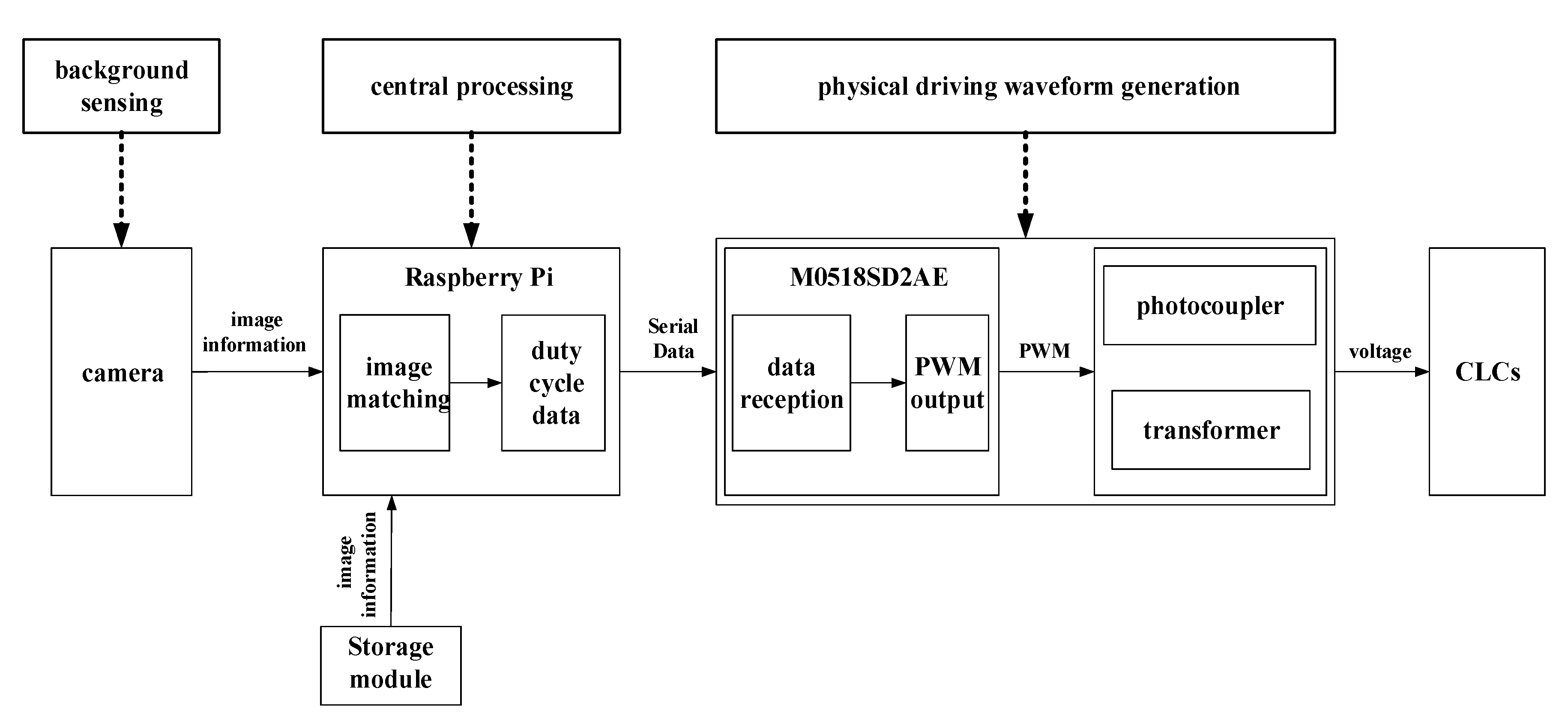
2.1. A Visible-Band Adaptive Camouflage System
2.2. The Dominant Color Feature-Matching Algorithm
- (1)
- Extract the RGB values (R, G, B) of each pixel in the local environmental image.
- (2)
- Transform the RGB values (R, G, B) of each pixel in the local environment image into the HSL space to obtain the corresponding HSL values (H, S, L). The conversion formula of RGB and HSL color space is as follows [10]:
- (1)
- Obtain the dominant color feature matrix of the environment image according to the HSL color gamut interval. The dominant colors are expressed as the dominant colors feature matrix, which contains 26 elements. Each element corresponds to the sum of pixels in the divided color gamut interval, as shown in Table 1.
- (2)
- Normalize the dominant colors feature matrix, which means to divide F[i] by the total number of pixels, with F[i] being the number of times a pixel having color i appears in the image.
- (3)
- Obtain the camouflage image with the highest similarity to the environment image. On the basis of the optimal matching theory, the similarity measure of the camouflage image and the target image can be computed by the correlation coefficient. Then, the retrieved result is ranked according to the value of similarity. The formula of correlation coefficient is as follows [11]:
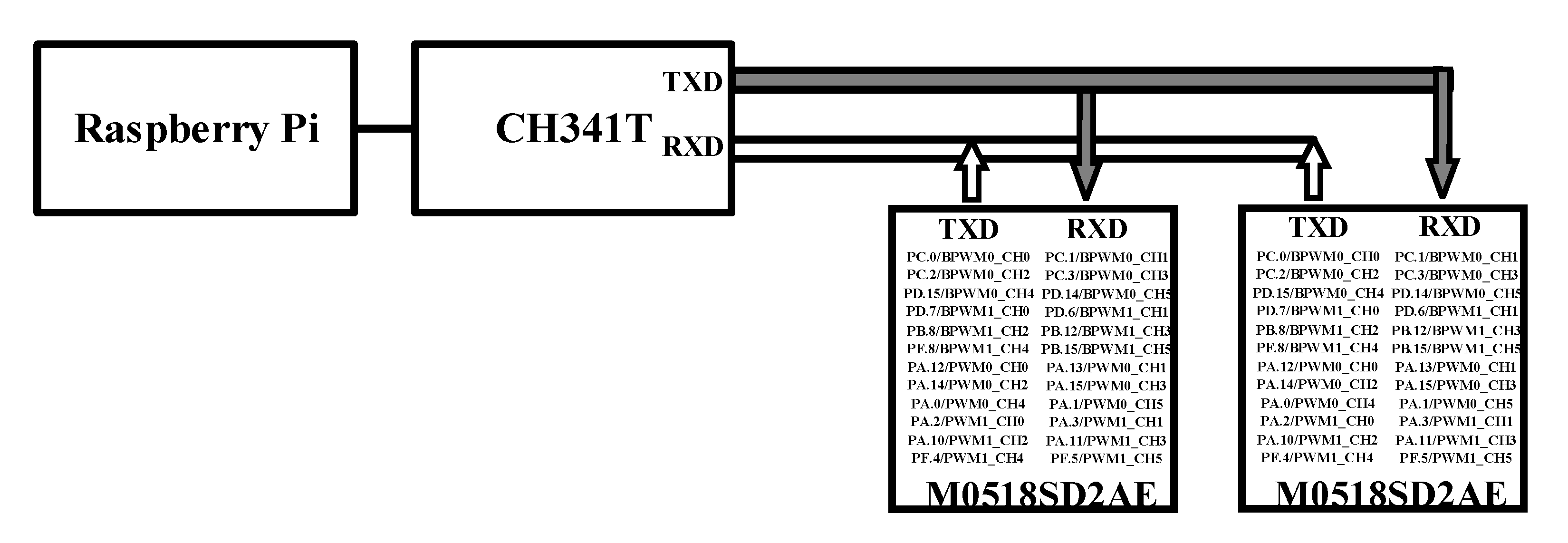
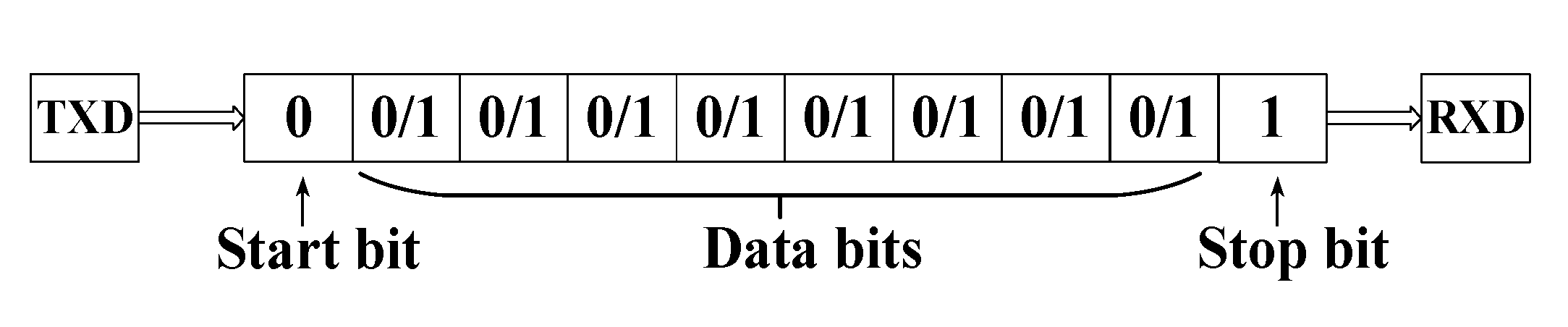
2.3. PWM Driving Circuit for the CLC Display
3. Results and Discussions
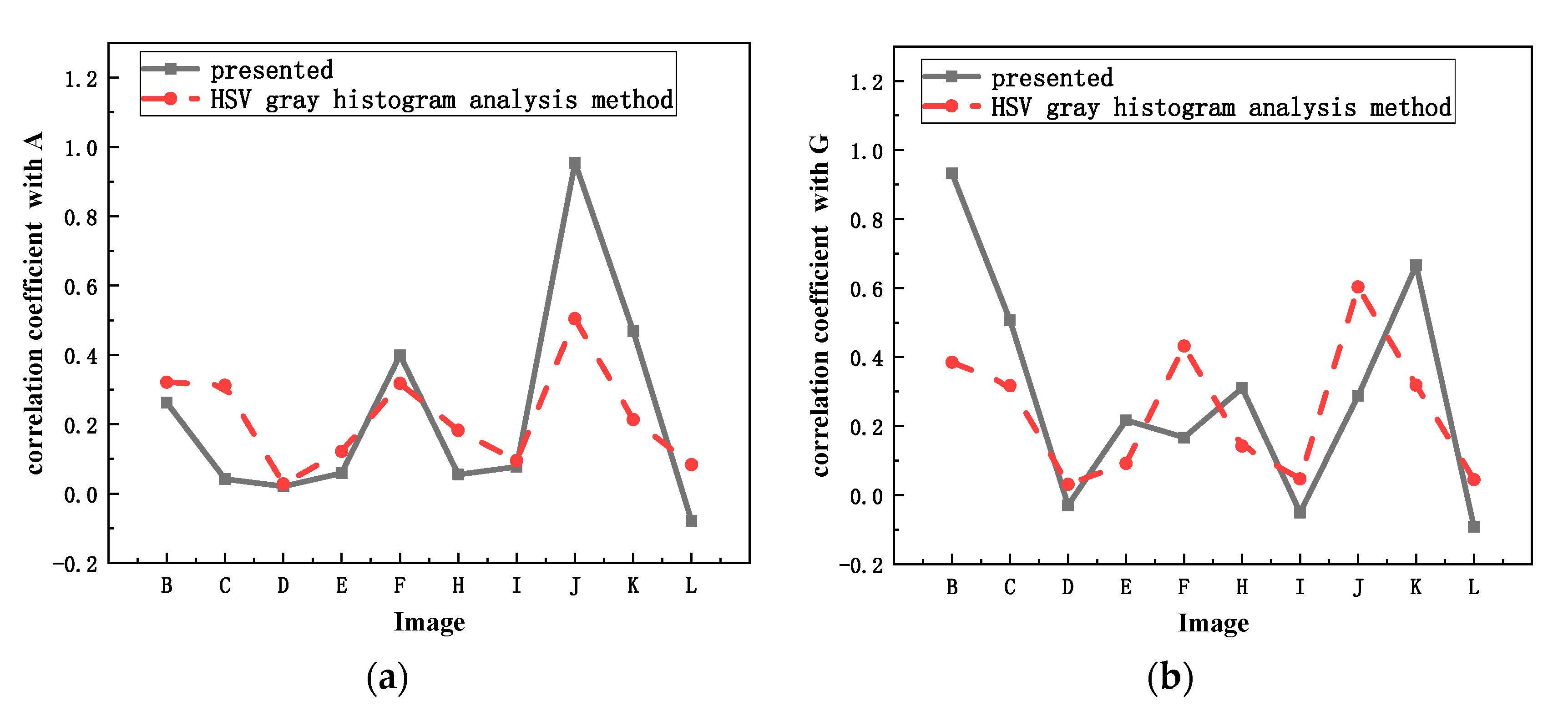
3.1. Camouflage Image Matching Results
3.2. Camouflage Assessment
3.3. Results of PWM Signals
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Singh, J.; Singh, D. An Analytical Approach to Design Camouflage Net for Microwave Absorption. DEFENCE Sci. J. 2019, 69, 469–473. [Google Scholar] [CrossRef]
- Przyby, W.; Radosz, W.; Januszko, A. Colour management system: Monte Carlo implementation for camouflage pattern generation. Color. Technol. 2020, 136, 407–416. [Google Scholar] [CrossRef]
- Xiao, H.; Qu, Z.; Lv, M.; Jiang, Y.; Wang, C.; Qin, R. Fast Self-Adaptive Digital Camouflage Design Method Based on Deep Learning. Appl. Sci. 2020, 10, 5284. [Google Scholar] [CrossRef]
- Xie, H.C. Design of Intelligent Environment Camouflage Driver Based on FPGA. Master’s Thesis, Department of Electronics and Electrical Engineering, UESTC University, Chengdu, China, 2015. [Google Scholar]
- Pezeshkian, N.; Neff, J.D. Adaptive Electronic Camouflage Using Texture Synthesis. Proc. SPIE-Int. Soc. Opt. Eng. 2012, 8387, 838707. [Google Scholar]
- Zhang, F. An Upper Bound of Task Loads in a Deadline-d all Busy Period for Multiprocessor Global EDF Real-Time Systems. Int. J. Comput. Syst. Sci. Eng. 2019, 34, 171–178. [Google Scholar]
- Mojsilovic, A.; Kovacevic, J.; Hu, J.; Safranek, R.J.; Ganapathy, S.K. Matching and retrieval based on the vocabulary and grammar of color patterns. IEEE Trans. Image Process. 2000, 9, 38–54. [Google Scholar] [CrossRef] [PubMed]
- Lin, T.; Liao, B.H.; Hsu, S.L.; Wang, J. Experimental investigation of HSL color model in error diffusion. In Proceedings of the UMEDIA, Colombo, Sri Lanka, 24–26 August 2015; pp. 268–272. [Google Scholar]
- Yang, L.; Huang, X.; Lv, R.; Lv, H. An Effective Similarity Measurement Algorithm for Dominant Color Feature Matching in Image Retrieval. Appl. Mech. Mater. 2012, 182–183, 1169–1173. [Google Scholar] [CrossRef]
- Abdullah, A.S.S.; Abed, M.A.; Al Barazanchi, I. Improving face recognition by elman neural network using curvelet transform and HSI color space. Period. Eng. Nat. Sci. 2019, 7, 430–437. [Google Scholar] [CrossRef]
- Adler, J.; Parmryd, J. Quantifying colocalization by correlation: The Pearson correlation coefficient is superior to the Mander′s overlap coefficient. Cytometry A 2010, 77a, 733–742. [Google Scholar] [CrossRef] [PubMed]
- Nejad, M.B.; Shiri, M.E. A New Enhanced Learning Approach to Automatic Image Classification Based on Salp Swarm Algorithm. Comput. Syst. Sci. Eng. 2019, 34, 91–100. [Google Scholar] [CrossRef]
- Ahn, H.A.; Hong, S.K.; Kwon, O.K. An Active Matrix Micro-Pixelated LED Display Driver for High Luminance Uniformity Using Resistance Mismatch Compensation Method. IEEE Trans. Circuits Syst. II Express Briefs 2018, 65, 724–728. [Google Scholar] [CrossRef]
- Lv, X.; Loo, K.H.; Lai, Y.M.; Chi, K.T. Energy-Saving Driver Design for Full-Color Large-Area LED Display Panel Systems. IEEE Trans. Ind. Electron. 2014, 61, 4665–4673. [Google Scholar] [CrossRef]
- Liao, C.; Deng, W.; Song, D.; Huang, S.; Deng, L. Mirrored OLED pixel circuit for threshold voltage and mobility compensation with IGZO TFTs. Microelectron. J. 2015, 46, 923–927. [Google Scholar] [CrossRef]
- Lu, L.; Deng, L.; Ke, J.; Liao, C.; Huang, S. A Fast Ramp-Voltage-Based Current Programming Driver for AMOLED Display. Circuits Syst. II Express Briefs IEEE Trans. 2019, 66, 1129–1133. [Google Scholar] [CrossRef]
- Ke, J.; Deng, L.; Zhen, L.; Wu, Q.; Liao, C.; Luo, H.; Huang, S. An AMOLED Pixel Circuit Based on LTPS Thin-film Transistors with Mono-Type Scanning Driving. Electronics 2020, 9, 574. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Mei, Y.S.; Yu, J.Q.; Yu, T.P.; Li, J.X. A design of UART serial communication between the TMS320C6748 DSP and PC. Appl. Mech. Mater. 2013, 380–384, 3657–3660. [Google Scholar] [CrossRef]
- Wei, Z.B.; Huang, J.; Fang, Q. Re-vegetation camouflage assessment based on analysis of HSV grey scale histogram. Pro. Eng. 2012, 34, 31–35. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | H | S | L | Color |
|---|---|---|---|---|
| F[0] | (345°,360°] ∪ (360°,15°] | (0,0.5] | [0,1] | red |
| F[1] | (345°,360°] ∪ (360°,15°] | (0.5,1] | [0,1] | red |
| F[2] | (15°,45°] | (0,0.5] | [0,1] | orange |
| F[3] | (15°,45°] | (0.5,1] | [0,1] | orange |
| F[4] | (45°,75°] | (0,0.5] | [0,1] | yellow |
| F[5] | (45°,75°] | (0.5,1] | [0,1] | yellow |
| F[6] | (75°,105°] | (0,0.5] | [0,1] | flavo-green |
| F[7] | (75°,105°] | (0.5,1] | [0,1] | flavo-green |
| F[8] | (105°,135°] | (0,0.5] | [0,1] | green |
| F[9] | (105°,135°] | (0.5,1] | [0,1] | green |
| F[10] | (135°,165°] | (0,0.5] | [0,1] | bluish green |
| F[11] | (135°,165°] | (0.5,1] | [0,1] | bluish green |
| F[12] | (165°,195°] | (0,0.5] | [0,1] | cyan |
| F[13] | (165°,195°] | (0.5,1] | [0,1] | cyan |
| F[14] | (195°,225°] | (0,0.5] | [0,1] | cyan-blue |
| F[15] | (195°,225°] | (0.5,1] | [0,1] | cyan-blue |
| F[16] | (225°,255°] | (0,0.5] | [0,1] | blue |
| F[17] | (225°,255°] | (0.5,1] | [0,1] | blue |
| F[18] | (255°,285°] | (0,0.5] | [0,1] | bluish violet |
| F[19] | (255°,285°] | (0.5,1] | [0,1] | bluish violet |
| F[20] | (285°,315°] | (0,0.5] | [0,1] | purple |
| F[21] | (285°,315°] | (0.5,1] | [0,1] | purple |
| F[22] | (315°,345°] | (0,0.5] | [0,1] | purplish red |
| F[23] | (315°,345°] | (0.5,1] | [0,1] | purplish red |
| F[24] | 0° | (0,0.5] | [0,1] | black |
| F[25] | 0° | (0.5,1] | [0,1] | white |
| Image | The Dominant Color Feature Matrix | Correlation Coefficient with A | Correlation Coefficient with G |
|---|---|---|---|
| A | F[0, 0, 0, 0, 0, 247, 9479, 3218, 44,798, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 6388] | ||
| G | F[0, 0, 0, 0, 0, 0, 4208, 58,147, 19,464, 6408, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 8980] | ||
| B | F[0, 0, 0, 0, 0, 12,500, 2181, 36,468, 10,008, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1018] | 0.26235 | 0.93230 |
| C | F[0, 0, 0, 7239, 0, 79,782, 0, 59,143, 0, 0, 0, 6142, 0, 0, 0, 0, 0, 5309, 0, 0, 0, 0, 0, 0, 0, 0] | −0.04206 | 0.50677 |
| D | F[0, 136,885, 0, 11,919, 0, 3877, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 59,333] | −0.02123 | −0.02930 |
| E | F[0, 0, 0, 0, 0, 133,677, 0, 41,677, 0, 20,995, 0, 19,027, 0, 1228, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] | −0.05872 | 0.21728 |
| F | F[0, 0, 0, 0, 0, 0, 0, 0, 43,362, 57,120, 24,460, 0, 32,468, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 79,799] | 0.39913 | 0.16673 |
| H | F[0, 0, 0, 0, 0, 0, 0, 6736, 160, 21,005, 6302, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 467] | −0.05491 | 0.30998 |
| I | F[0, 16,895, 0, 160,235, 0, 67,242, 0, 7454, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 743] | −0.07727 | −0.05059 |
| J | F[0, 0, 0, 0, 0, 1, 630, 22, 77,990, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 28,157] | 0.95458 | 0.28831 |
| K | F[0, 0, 0, 0, 0, 24,994, 0, 27,285, 25,322, 23,557, 0, 3201, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0] | 0.46870 | 0.66638 |
| L | F[0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 125,496, 109,914, 63,076, 0, 9809, 0, 0, 0, 0, 0, 41,875] | −0.07857 | −0.09224 |
| Image | A | G | ||||||
|---|---|---|---|---|---|---|---|---|
| H | S | V | Mean Correlation | H | S | V | Mean Correlation | |
| B | 0.8253 | −0.0327 | 0.1054 | 0.3211 | 0.8496 | 0.0998 | 0.2053 | 0.3849 |
| C | 0.5136 | −0.3520 | −0.0715 | 0.3124 | 0.5500 | 0.0386 | 0.3637 | 0.3174 |
| D | −0.0293 | −0.0252 | −0.0291 | 0.0278 | −0.0343 | 0.0435 | −0.0149 | 0.0309 |
| E | 0.0319 | −0.1280 | 0.2056 | 0.1218 | 0.1719 | 0.0796 | 0.0251 | 0.0922 |
| F | 0.1684 | 0.7182 | 0.0666 | 0.3177 | 0.2446 | 0.8335 | 0.2185 | 0.4322 |
| H | −0.0352 | 0.0908 | 0.4214 | 0.1825 | 0.1339 | −0.0017 | 0.2905 | 0.1420 |
| I | 0.1420 | −0.1069 | 0.0357 | 0.0948 | 0.0625 | 0.0434 | 0.0354 | 0.0471 |
| J | 0.6833 | 0.7683 | 0.0620 | 0.5045 | 0.4542 | 0.7918 | 0.5634 | 0.6031 |
| K | 0.5815 | 0.0347 | 0.0237 | 0.2133 | 0.6399 | 0.1879 | 0.1273 | 0.3184 |
| L | −0.0418 | −0.0205 | 0.1883 | 0.0835 | −0.0489 | −0.0476 | 0.0386 | 0.0450 |
| System | Platform | Camouflage Match | Response Time | Response Wavelength | Anti-Interference Ability |
|---|---|---|---|---|---|
| This work | Raspberry Pi | High accuracy | 1.17s | 604~544 nm | Stable |
| [4] | FPGA | N.A. | N.A. | 560~580 nm | Susceptible to reflected light |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhen, L.; Zhao, Y.; Zhang, P.; Liao, C.; Gao, X.; Deng, L. Implementation of Adaptive Real-Time Camouflage System in Visible-Light Band. Appl. Sci. 2021, 11, 6706. https://doi.org/10.3390/app11156706
Zhen L, Zhao Y, Zhang P, Liao C, Gao X, Deng L. Implementation of Adaptive Real-Time Camouflage System in Visible-Light Band. Applied Sciences. 2021; 11(15):6706. https://doi.org/10.3390/app11156706
Chicago/Turabian StyleZhen, Liying, Yan Zhao, Pin Zhang, Congwei Liao, Xiaohui Gao, and Lianwen Deng. 2021. "Implementation of Adaptive Real-Time Camouflage System in Visible-Light Band" Applied Sciences 11, no. 15: 6706. https://doi.org/10.3390/app11156706
APA StyleZhen, L., Zhao, Y., Zhang, P., Liao, C., Gao, X., & Deng, L. (2021). Implementation of Adaptive Real-Time Camouflage System in Visible-Light Band. Applied Sciences, 11(15), 6706. https://doi.org/10.3390/app11156706