
Non-Slender n-Link Chain Driven by Single-Joint and Multi-Joint Muscle Actuators: Closed-Form Dynamic Equations and Joint Reaction Forces


{kind=link}
Abstract
:1. Introduction
2. Methods and Results
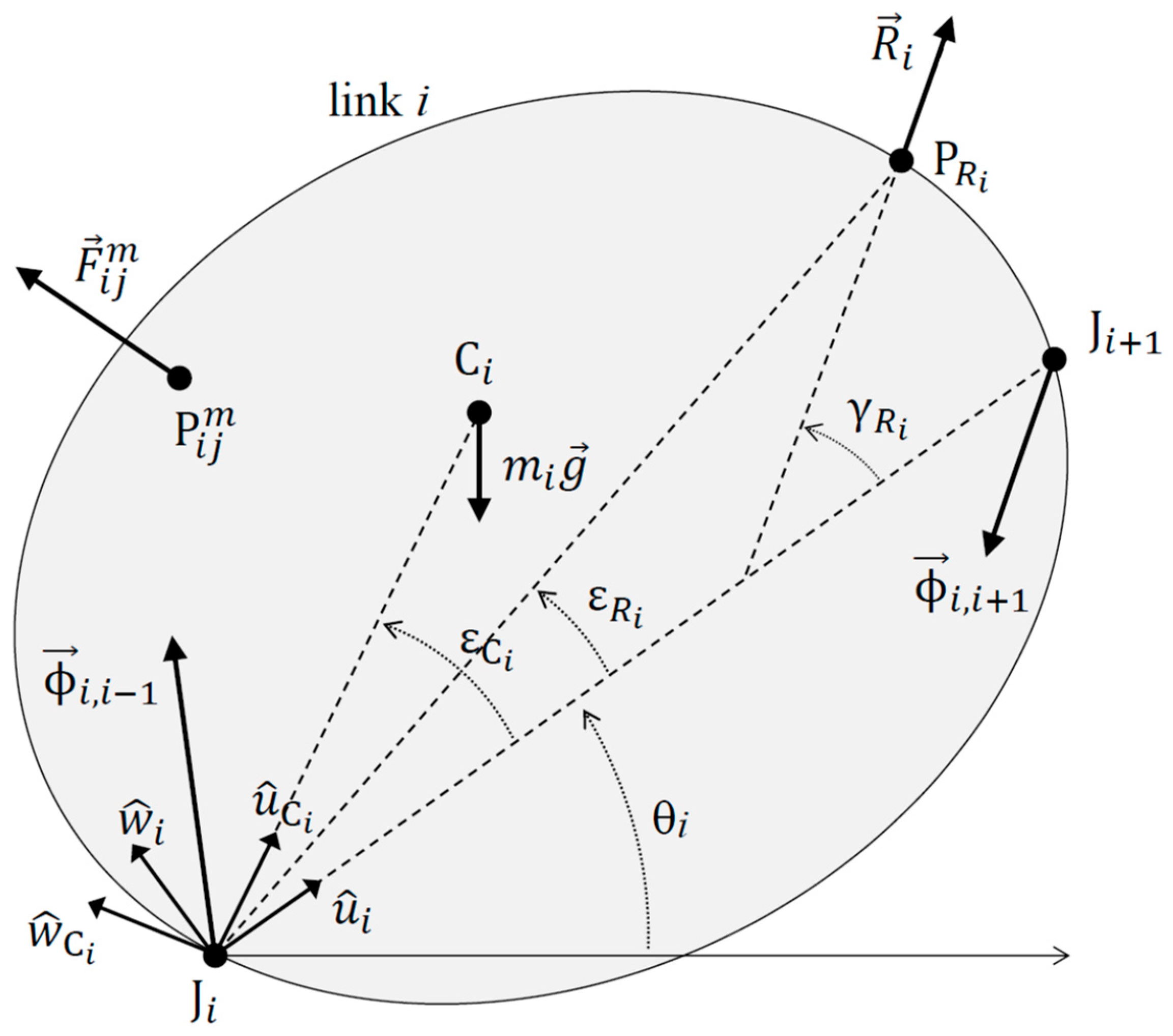
2.1. The Chain Model
- The weight of the link applied at .
- A contact external resistance may act on a point of the link at distance from ( is the angle between and , and the angle between and ). The contact external force acting on the base is typically the ground reaction force. The case of multiple contact external resistances acting on a link is examined in the discussion section.
- The sum of muscle forces exerted on points of link i by the muscles joining link i to the other links j ( for single-joint muscles, for two-joint muscles, etc.). The sum is extended over all muscles joining link i to link j.
2.2. Force Equations and Joint Reaction Forces
2.3. Moment Equations and Muscle Torques
3. Discussion
4. Conclusions
Funding
Conflicts of Interest
Nomenclature
| Points | |
| center of mass of link i | |
| center of rotation of the joint between link i − 1 and link i | |
| point of application of the muscle force acting on link i | |
| point of application of the external force acting on link i | |
| Distances | |
| distance between and | |
| distance between and | |
| distance between and | |
| Unit vectors | |
| unit vector normal to the plane of the chain | |
| unit vector of | |
| unit vector of () | |
| Angles | |
| angle between the vector and the horizontal line | |
| angle between and | |
| angle between and | |
| angle between and | |
| Velocities and accelerations | |
| acceleration of | |
| acceleration of | |
| angular velocity of link i | |
| angular acceleration of link i | |
| Inertial quantities | |
| moment of inertia of link i with respect to | |
| moment of inertia of link i with respect to | |
| mass of link i | |
| Forces | |
| muscle force exerted on link i by the muscle m joining link i and link j | |
| joint reaction force exerted on link i by link i + 1 | |
| weight of link i | |
| contact external force acting on link i | |
| Mathematical symbols | |
| Kronecker delta ( if , if ) | |
| scalar product of two vectors | |
| vector product of two vectors |
Appendix A. Moment Equations for Chains with Two or Three Links
- Moment equations for a two-link chain
- Moment equations for a three-link chain
References
- Craig, J.J. Introduction to Robotics: Mechanics and Control, 3rd ed.; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2004. [Google Scholar]
- Siciliano, B.; Sciavicco, L.; Villani, L.; Oriolo, G. Robotics Modelling, Planning and Control; Springer: London, UK, 2009. [Google Scholar]
- Zatsiorsky, V.M. Kinematics of Human Motion; Human Kinetics: Champaign, IL, USA, 1998. [Google Scholar]
- Zatsiorsky, V.M. Kinetics of Human Motion; Human Kinetics: Champaign, IL, USA, 2002. [Google Scholar]
- Hollerbach, J.M.; Flash, T. Dynamic interactions between limb segments during planar arm movements. Biol. Cybern. 1982, 44, 67–77. [Google Scholar] [CrossRef] [PubMed]
- Huang, T.; Roberts, E.; Youm, Y. Biomechanics of kicking. In Human Body Dynamics: Impact, Occupational, and Athletic Aspects; Ghista, D., Ed.; Clarendon Press: Oxford, UK, 1982; pp. 407–443. [Google Scholar]
- Sainburg, R.L.; Ghilardi, M.F.; Poizner, H.; Ghez, C. Control of limb dynamics in normal subjects and patients without proprioception. J. Neurophysiol. 1995, 73, 820–835. [Google Scholar] [CrossRef]
- Cesari, P.; Shiratori, T.; Olivato, P.; Duarte, M. Analysis of kinematically redundant reaching movements using the equilibrium-point hypothesis. Biol. Cybern. 2001, 84, 217–226. [Google Scholar] [CrossRef]
- Hof, L. An explicit expression for the moment in multibody systems. J. Biomech. 1992, 25, 1209–1211. [Google Scholar] [CrossRef]
- Cleland, J. On the actions of muscles passing over more than one joint. J. Anat. Physiol. 1867, 1, 85–93. [Google Scholar] [PubMed]
- Pandy, M.G.; Shelburne, K.B. Dependence of cruciate-ligament loading on muscle forces and external load. J. Biomech. 1997, 30, 1015–1024. [Google Scholar] [CrossRef]
- Biscarini, A.; Benvenuti, P.; Botti, F.M.; Brunetti, A.; Brunetti, O.; Pettorossi, V.E. Voluntary enhanced cocontraction of hamstring muscles during open kinetic chain leg extension exercise: Its potential unloading effect on the anterior cruciate ligament. Am. J. Sports Med. 2014, 42, 2103–2112. [Google Scholar] [CrossRef] [PubMed]
- Escamilla, R.F.; Fleisig, G.S.; Zheng, N.; Barrentine, S.W.; Wilk, K.E.; Andrews, J.R. Biomechanics of the knee during closed kinetic chain and open kinetic chain exercises. Med. Sci. Sports Exerc. 1998, 30, 556–569. [Google Scholar] [CrossRef]
- Yanagawa, T.; Goodwin, C.J.; Shelburne, K.B.; Giphart, J.E.; Torry, M.R.; Pandy, M.G. Contributions of the individual muscles of the shoulder to glenohumeral joint stability during abduction. J. Biomech. Eng. 2008, 130, 021024. [Google Scholar] [CrossRef] [PubMed]
- Biscarini, A.; Botti, F.M.; Pettorossi, V.E. Selective contribution of each hamstring muscle to anterior cruciate ligament protection and tibiofemoral joint stability in leg-extension exercise: A simulation study. Eur. J. Appl. Physiol. 2013, 113, 2263–2273. [Google Scholar] [CrossRef]
- Shelburne, K.B.; Torry, M.R.; Pandy, M.G. Muscle, Ligament, and Joint-Contact Forces at the Knee during Walking. Med. Sci. Sports Exerc. 2005, 37, 1948–1956. [Google Scholar] [CrossRef] [Green Version]
- Khoddam-Khorasani, P.; Arjmand, N.; Shirazi-Adl, A. Effect of changes in the lumbar posture in lifting on trunk muscle and spinal loads: A combined in vivo, musculoskeletal, and finite element model study. J. Biomech. 2020, 104, 109728. [Google Scholar] [CrossRef]
- Reinold, M.M.; Escamilla, R.F.; Wilk, K.E. Current concepts in the scientific and clinical rationale behind exercises for glenohumeral and scapulothoracic musculature. J. Orthop. Sports Phys. Ther. 2009, 39, 105–117. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Biscarini, A.; Contemori, S.; Dieni, C.V.; Panichi, R. Joint Torques and Tibiofemoral Joint Reaction Force in the Bodyweight “Wall Squat” Therapeutic Exercise. Appl. Sci. 2020, 10, 3019. [Google Scholar] [CrossRef]
- Pandy, M.G. Computer modeling and simulation of human movement. Annu. Rev. Biomed. Eng. 2001, 3, 245–273. [Google Scholar] [CrossRef] [PubMed]
- Prilutsky, B.I.; Zatsiorsky, V.M. Optimization-Based Models of Muscle Coordination. Exerc. Sport Sci. Rev. 2002, 30, 32. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Erdemir, A.; McLean, S.; Herzog, W.; Van den Bogert, A. Model-based estimation of muscle forces exerted during movements. Clin. Biomech. 2007, 22, 131–154. [Google Scholar] [CrossRef] [Green Version]
- Gagnon, D.; Arjmand, N.; Plamondon, A.; Shirazi-Adl, A.; Larivière, C. An improved multi-joint EMG-assisted optimization approach to estimate joint and muscle forces in a musculoskeletal model of the lumbar spine. J. Biomech. 2011, 44, 1521–1529. [Google Scholar] [CrossRef]
- Sharifzadeh-Kermani, A.; Arjmand, N.; Vossoughi, G.; Shirazi-Adl, A.; Patwardhan, A.G.; Parnianpour, M.; Khalaf, K. Estimation of Trunk Muscle Forces Using a Bio-Inspired Control Strategy Implemented in a Neuro-Osteo-Ligamentous Finite Element Model of the Lumbar Spine. Front. Bioeng. Biotechnol. 2020, 8, 949. [Google Scholar] [CrossRef]
- Mokhtarzadeh, H.; Yeow, C.H.; Hong Goh, J.C.; Oetomo, D.; Malekipour, F.; Lee, P.V. Contributions of the soleus and gastrocnemius muscles to the anterior cruciate ligament loading during single-leg landing. J. Biomech. 2013, 46, 1913–1920. [Google Scholar] [CrossRef]
- Biscarini, A.; Calandra, C.; Contemori, S. 2020. Three-dimensional mechanical modeling of the barbell bench press exercise: Unveiling the biomechanical function of the triceps brachii. Proc. IMechE Part P J. Sports Eng. Technol. 2020, 234, 245–256. [Google Scholar]
- Winter, A. Biomechanics and Motor Control of Human Movement, 4th ed.; Wiley: Hoboken, NJ, USA, 2009; p. 109. [Google Scholar]
- Kandel, E.R. Principles of Neural Science, 5th ed.; McGraw-Hill: New York, NY, USA, 2013; pp. 743–767. [Google Scholar]
- Enoka, R.M. Neuromechanics of Human Movement; Human Kinetics: Champaign, IL, USA, 2015. [Google Scholar]
- Proske, U.; Gandevia, S.C. The proprioceptive senses: Their roles in signaling body shape, body position and movement, and muscle force. Physiol. Rev. 2012, 92, 1651–1697. [Google Scholar] [CrossRef] [PubMed]
- Riemann, B.L.; Lephart, S.M. The sensorimotor system, part I: The physiologic basis of functional joint stability. J. Athl. Train. 2002, 37, 71–79. [Google Scholar]
- Riemann, B.L.; Lephart, S.M. The sensorimotor system, part II: The role of proprioception in motor control and functional joint stability. J. Athl. Train. 2002, 37, 80–84. [Google Scholar] [PubMed]
- Biscarini, A. Simulating the Fast Prediction Strategy of the Sensorimotor System. Biomimetics 2021, 6, 14. [Google Scholar] [CrossRef] [PubMed]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Biscarini, A. Non-Slender n-Link Chain Driven by Single-Joint and Multi-Joint Muscle Actuators: Closed-Form Dynamic Equations and Joint Reaction Forces. Appl. Sci. 2021, 11, 6860. https://doi.org/10.3390/app11156860
Biscarini A. Non-Slender n-Link Chain Driven by Single-Joint and Multi-Joint Muscle Actuators: Closed-Form Dynamic Equations and Joint Reaction Forces. Applied Sciences. 2021; 11(15):6860. https://doi.org/10.3390/app11156860
Chicago/Turabian StyleBiscarini, Andrea. 2021. "Non-Slender n-Link Chain Driven by Single-Joint and Multi-Joint Muscle Actuators: Closed-Form Dynamic Equations and Joint Reaction Forces" Applied Sciences 11, no. 15: 6860. https://doi.org/10.3390/app11156860
APA StyleBiscarini, A. (2021). Non-Slender n-Link Chain Driven by Single-Joint and Multi-Joint Muscle Actuators: Closed-Form Dynamic Equations and Joint Reaction Forces. Applied Sciences, 11(15), 6860. https://doi.org/10.3390/app11156860