
Theoretical Modeling and Vibration Isolation Performance Analysis of a Seat Suspension System Based on a Negative Stiffness Structure



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
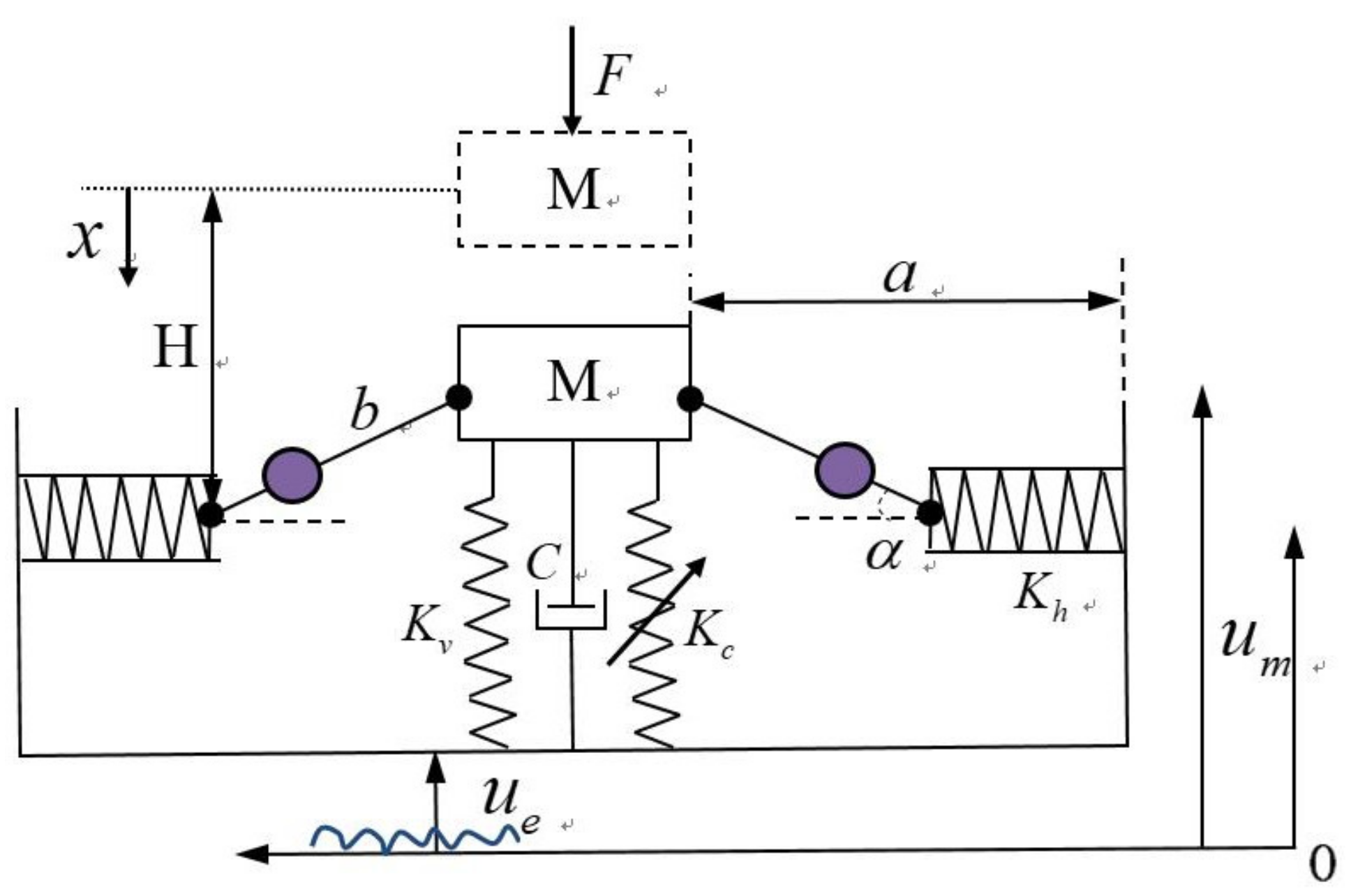
2. Model Description of Seat Suspension
3. Static Analysis
3.1. Theoretical Model
3.2. Quasi-Zero-Stiffness (QZS) Conditions
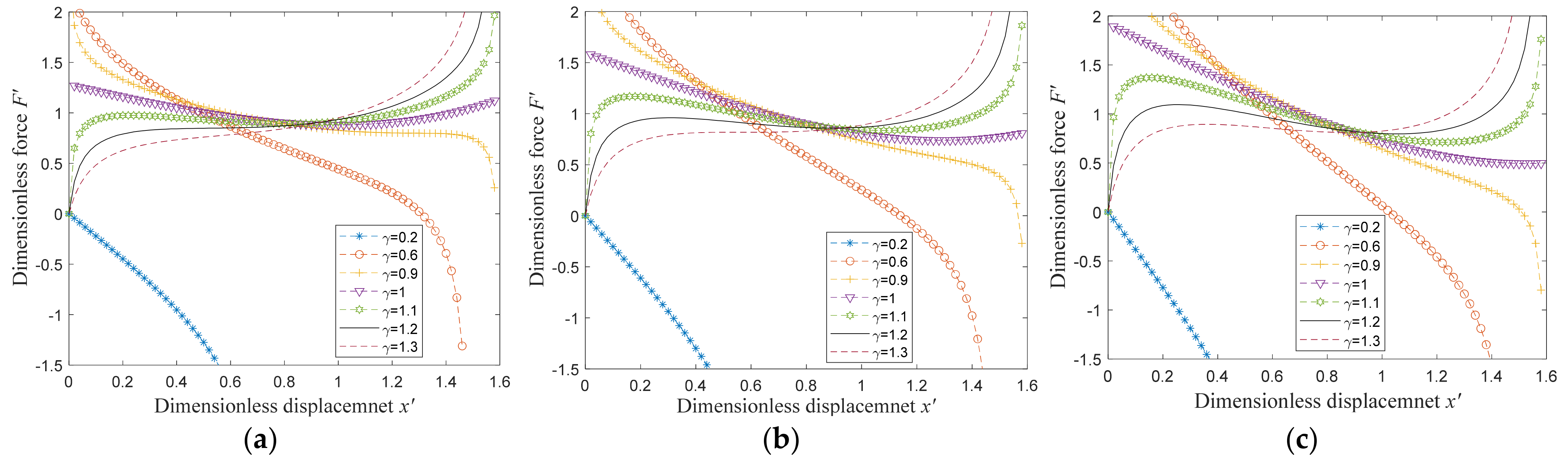
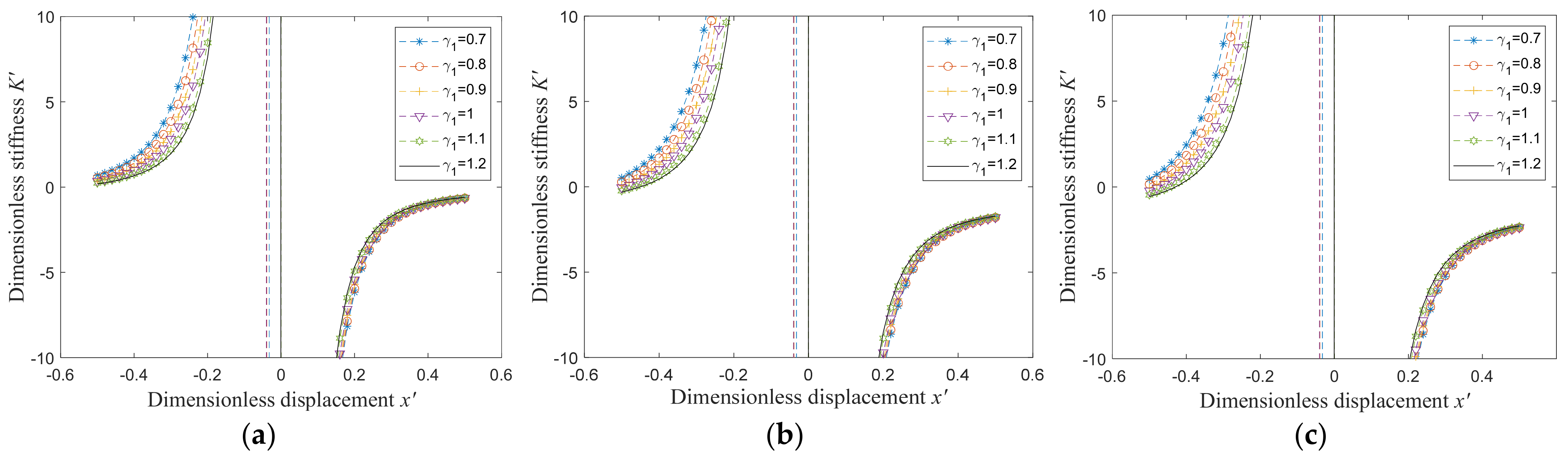
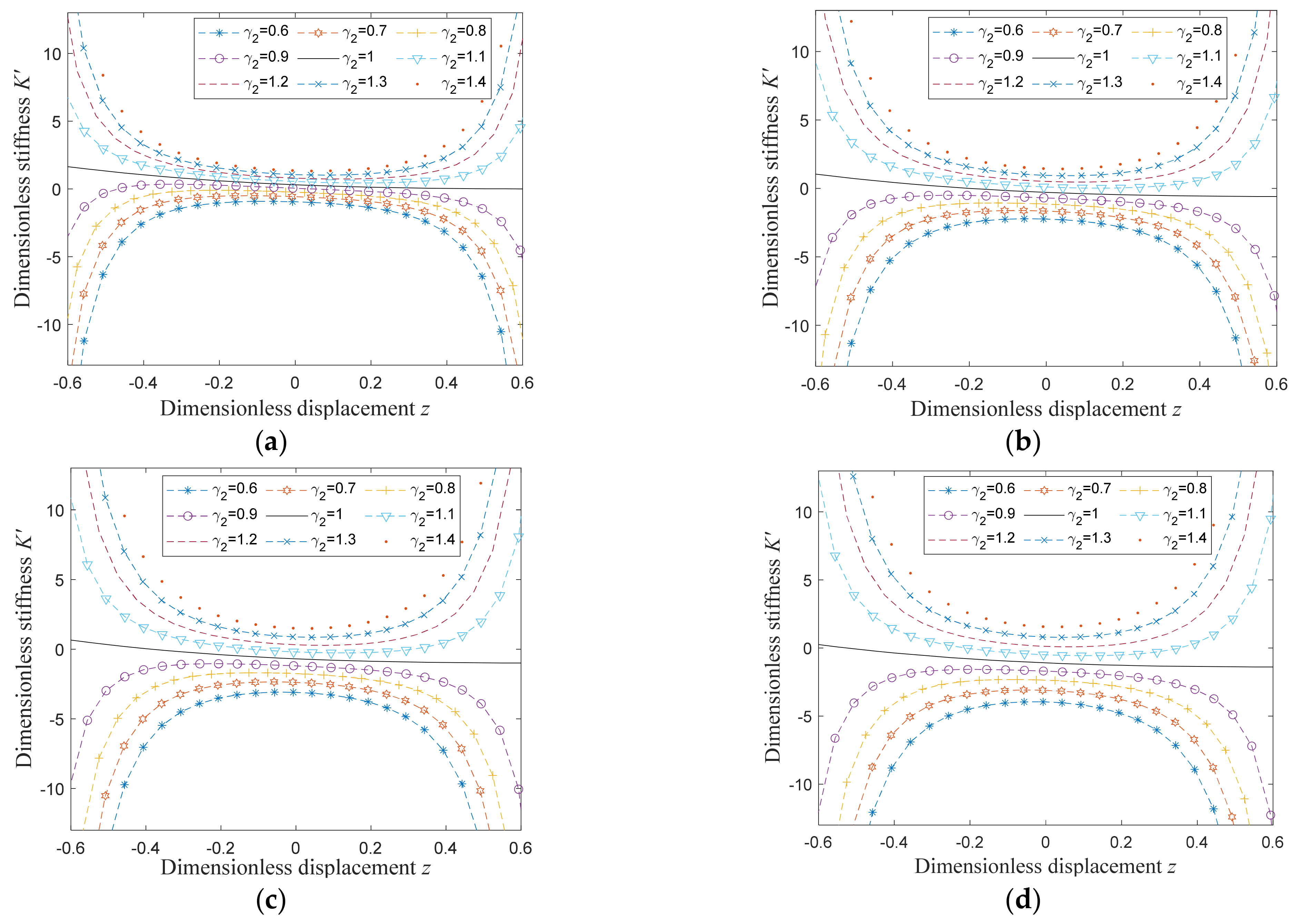
3.3. Parameter Analysis
4. Dynamic Analysis
4.1. Dynamic Modeling of the Proposed Seat Suspension
4.2. Displacement Transmissibility
4.3. Numerical Simulations and Stability Analysis
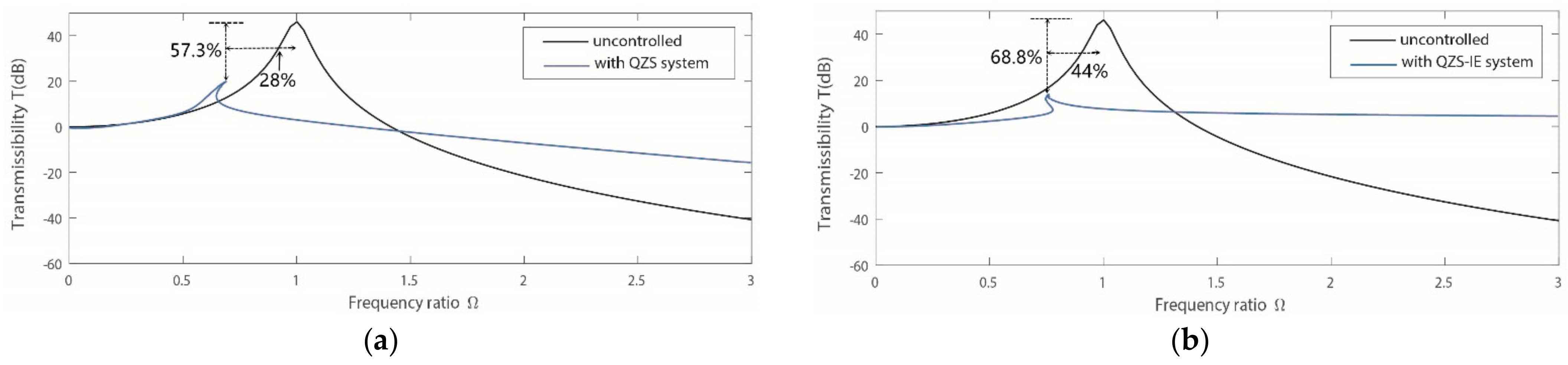
5. Vibration Suppression Effect
6. Parameter Studies and Discussions
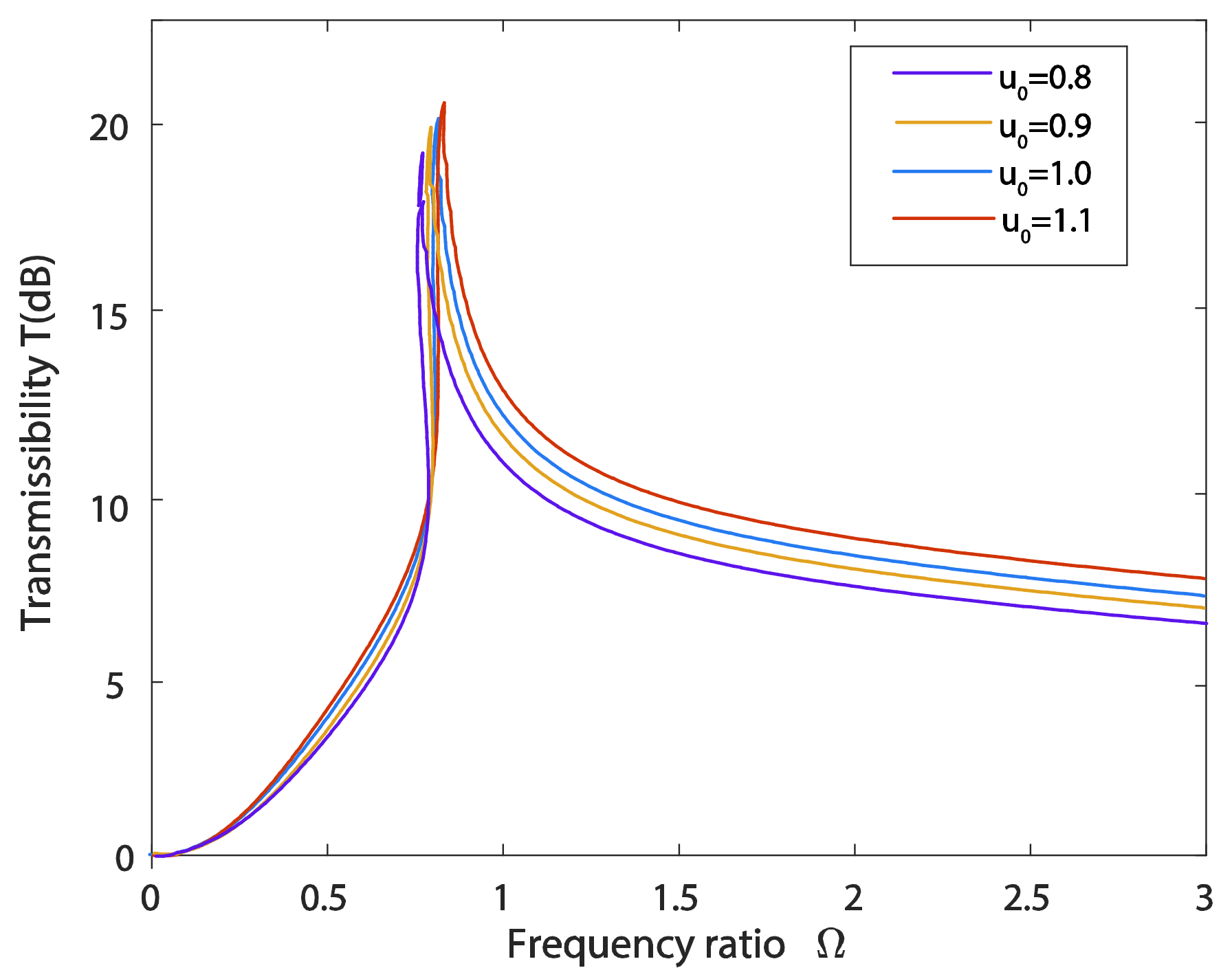
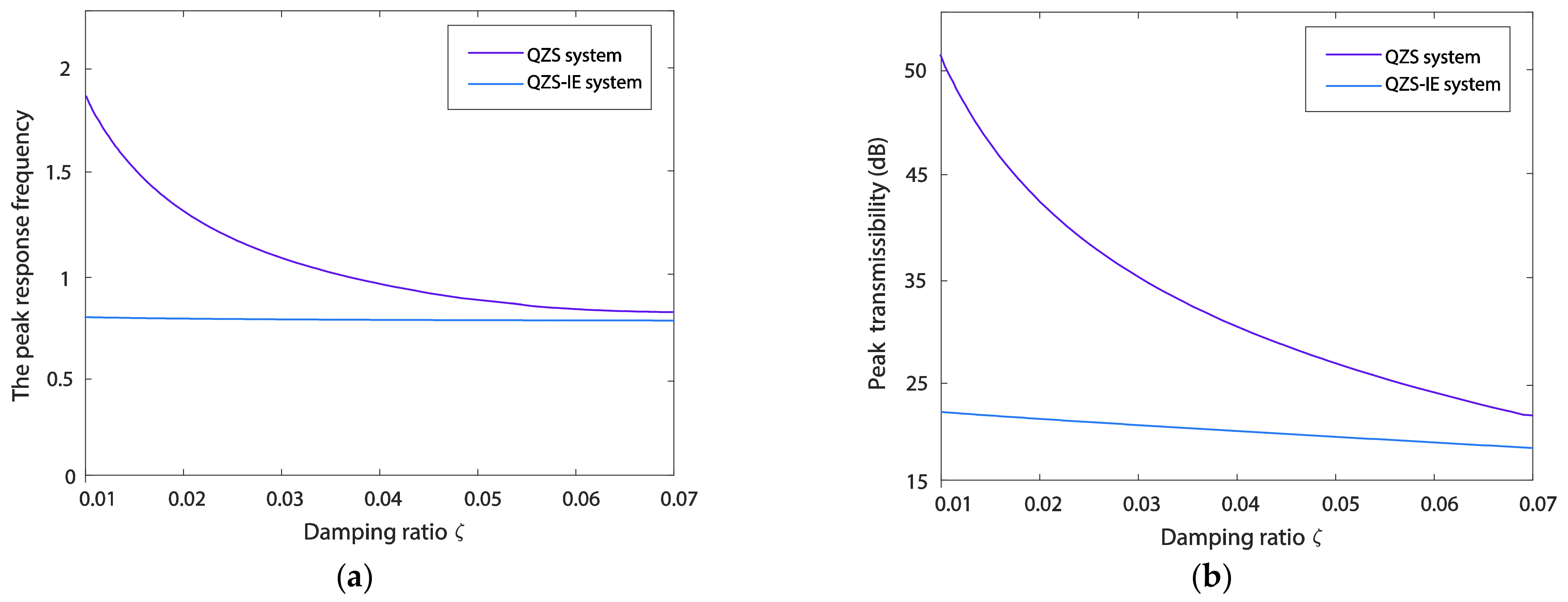
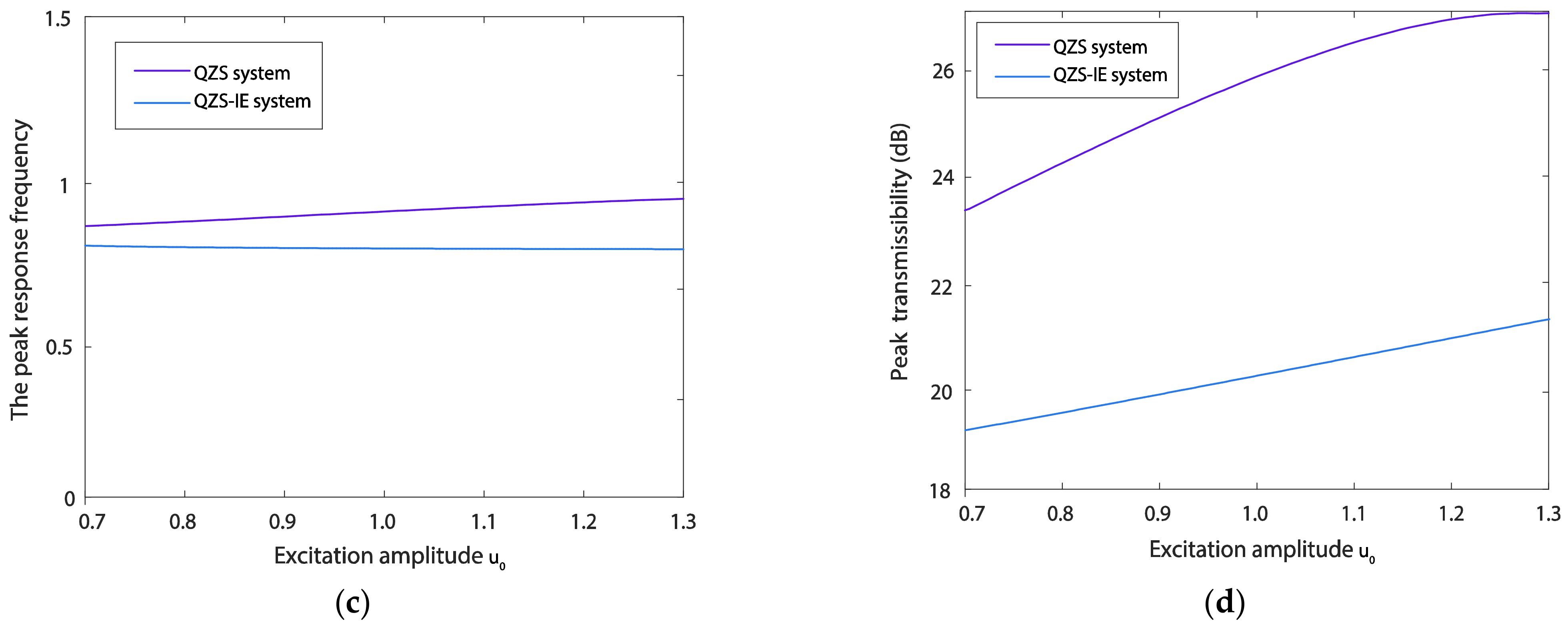
6.1. Influences of Excitation Amplitude and Damping Ratio on the Transmissibility
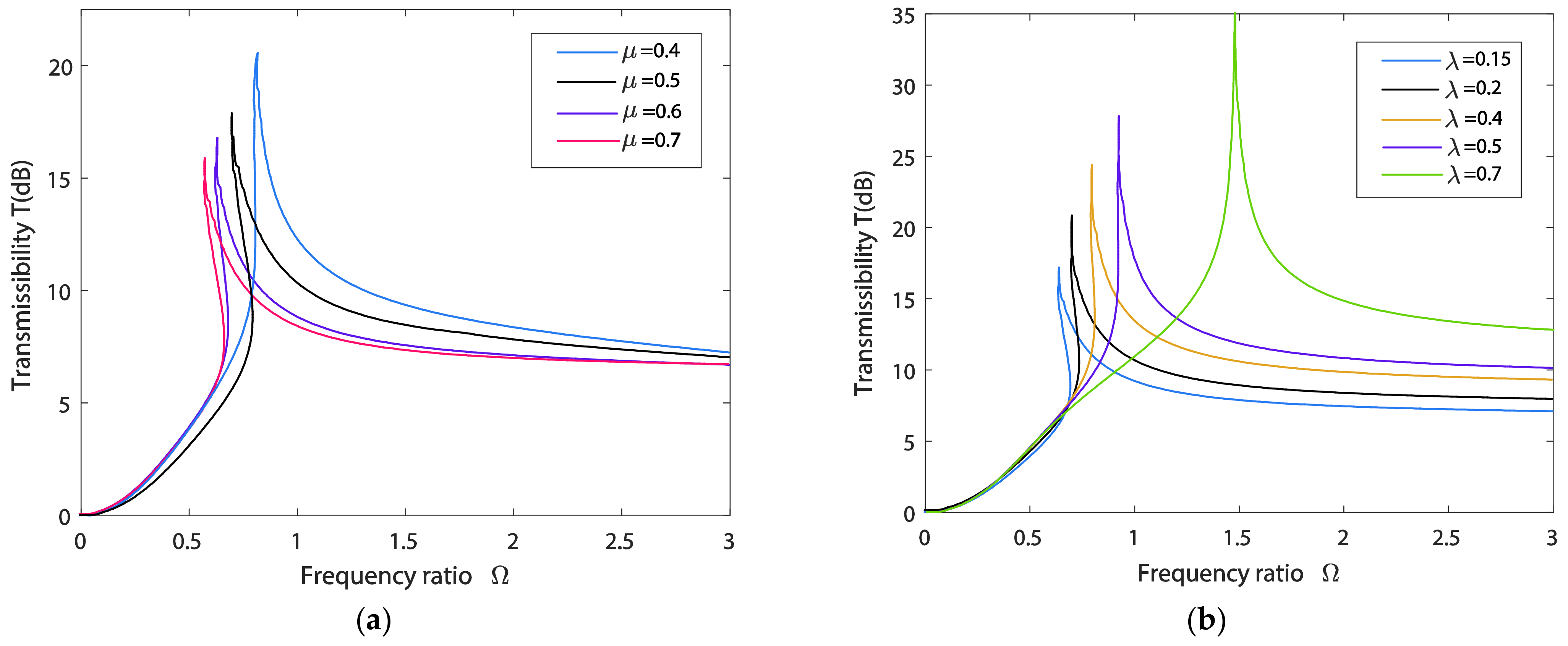
6.2. Influences of Parameter Selection for the Inerter Element on the Transmissibility
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nguyen, S.D.; Nguyen, Q.H.; Choi, S.-B. A hybrid clustering based fuzzy structure for vibration control—Part 2: An application to semi-active vehicle seat-suspension system. Mech. Syst. Signal Process. 2015, 56–57, 288–301. [Google Scholar] [CrossRef]
- Kulkarni, S.; Spencer, S.; Horton, D.J. Isolation Mount Assembly. U.S. Patent 11,001,306, 11 May 2021. [Google Scholar]
- Deshmukh, S.R.; Krishnan Balaji, N.S.; Saharabhudhe, S.; Khubalkar, S.; Parameswaran, A.P. Designing of Control Strategy for High Voltage Battery Isolation in an Electric Vehicles. In Proceedings of the 2019 IEEE 5th International Conference for Convergence in Technology (I2CT), Bombay, India, 29–31 March 2019. [Google Scholar]
- Zhentong, L.; Hongwen, H. Sensor fault detection and isolation for a lithium-ion battery pack in electric vehicles using adaptive extended Kalman filter. Appl. Energy 2017, 185, 2033–2044. [Google Scholar]
- Griffin, M.J. Handbook of Human Vibration, 1st ed.; Academic Press: Cambridge, UK, 2012. [Google Scholar]
- Friesenbichler, B.; Nigg, B.M.; Dunn, J.F. Local metabolic rate during whole body vibration. J. Appl. Physiol. 2013, 114, 1421–1425. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Carletti, E.; Pedrielli, F. Tri-axial evaluation of the vibration transmitted to the operators of crawler compact loaders. Int. J. Ind. Ergon. 2018, 68, 46–56. [Google Scholar] [CrossRef]
- ISO. Mechanical Vibration and Shock: Evaluation of Human Exposure to Whole-Body Vibration. Part 1, General Requirements: International Standard ISO 2631-1: 1997 (E); ISO: Geneva, Switzerland, 1997. [Google Scholar]
- Knothe, K.; Stichel, S. (Eds.) Human perception of vibrations-ride comfort. In Rail Vehicle Dynamics; Springer: New York, NY, USA, 2017; pp. 141–157. [Google Scholar]
- Van Eijk, J.; Dijksman, J. Plate spring mechanism with constant negative stiffness. Mech. Mach. Theory 1979, 14, 1–9. [Google Scholar] [CrossRef]
- Lee, C.M.; Goverdovskiy, V.N.; Temnikov, A.I. Design of springs with “negative’’ stiffness to improve vehicle driver vibration isolation. J. Sound Vib. 2007, 302, 865–874. [Google Scholar] [CrossRef]
- Yang, J.; Xiong, Y.; Xing, J. Dynamics and power flow behaviour of a nonlinear vibration isolation system with a negative stiffness mechanism. J. Sound Vib. 2013, 332, 167–183. [Google Scholar] [CrossRef]
- Junshu, H.; Lingshuai, M.; Jinggong, S. Design and Characteristics Analysis of a Nonlinear Isolator Using a Curved-Mount-Spring-Roller Mechanism as Negative Stiffness Element. Math. Probl. Eng. 2018, 2018, 1–15. [Google Scholar] [CrossRef]
- Yuanqing, F.; Peimin, G. A vibration Isolation Device for Elastic Elements in Parallel of Positive and Negative Stiffness. 1 November 1985. Available online: https://d.wanfangdata.com.cn/patent/CN85109107 (accessed on 25 July 2021).
- Jianzhuo, Z.; Dan, L.; Shen, D.; Dong, S. A Study on Ultra-low Frequency Nonlinear Parallel Vibration Isolation System for Precision Instruments. China Mech. Eng. 2004, 15, 69–71. [Google Scholar]
- Han, J.; Shishu, X.; Yong, Y. Analysis of structural vibration isolation effect based on negative stiffness principle. J. Huazhong Univ. Sci. Technol. 2010, 38, 76–79. [Google Scholar]
- Donghai, L.; Shougen, Z.; Yujin, H.; Li, T. Dynamic analysis of quasi-zero stiffness isolator with time delay control. Vib. Shock. 2018, 37, 49–55. [Google Scholar]
- Lu, Z.; Brennan, M.J.; Chen, L.-Q. On the transmissibilities of nonlinear vibration isolation system. J. Sound Vib. 2016, 375, 28–37. [Google Scholar] [CrossRef]
- Sarlis, A.A.; Pasala, D.T.R.; Constantinou, M.C.; Reinhorn, A.M.; Nagarajaiah, S.; Taylor, D.P. Negative Stiffness Device for Seismic Protection of Structures. J. Struct. Eng. 2013, 139, 1124–1133. [Google Scholar] [CrossRef] [Green Version]
- Palomares, E.; Nieto, A.; Morales, A.L.; Chicharro, J.; Pintado, P. Numerical and experimental analysis of a vibration isolator equipped with a negative stiffness system. J. Sound Vib. 2018, 414, 31–42. [Google Scholar] [CrossRef]
- Davoodi, E.; Safarpour, P.; Pourgholi, M.; Khazaee, M. Design and evaluation of vibration reducing seat suspension based on negative stiffness structure. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 234, 4171–4189. [Google Scholar] [CrossRef]
- Dong, G.; Zhang, X.; Xie, S.; Yan, B.; Luo, Y. Simulated and experimental studies on a high-static-low-dynamic stiffness isolator using magnetic negative stiffness spring. Mech. Syst. Signal Process. 2017, 86, 188–203. [Google Scholar] [CrossRef]
- Yao, H.; Chen, Z.; Wen, B. Dynamic vibration absorber with negative stiffness for rotor system. Shock. Vib. 2016, 2016, 5231704. [Google Scholar] [CrossRef]
- Liu, D.; Liu, Y.; Sheng, D.; Liao, W. Seismic response analysis of an isolated structure with QZS under near-fault vertical earthquakes. Shock. Vib. 2018, 10, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Sun, X.; Jing, X. Multi-direction vibration isolation with quasi-zero stiffness by employing geometrical nonlinearity. Mech. Syst. Signal Process. 2015, 62, 149–163. [Google Scholar] [CrossRef]
- Meng, Q.; Yang, X.; Li, W.; Lu, E.; Sheng, L. Research and analysis of quasi-zero-stiffness isolator with geometric nonlinear damping. Shock Vib. 2017, 9, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Zhao, F.; Ji, J.; Ye, K.; Luo, Q. An innovative quasi-zero stiffness isolator with three pairs of oblique springs. Int. J. Mech. Sci. 2021, 192, 106093. [Google Scholar] [CrossRef]
- Sun, X.; Zhang, J. Displacement transmissibility characteristics of harmonically base excited damper isolators with mixed viscous damping. Shock. Vib. 2013, 20, 921–931. [Google Scholar] [CrossRef]
- Liu, C.; Yu, K. A high-static–low-dynamic-stiffness vibration isolator with the auxiliary system. Nonlinear Dyn. 2018, 94, 1549–1567. [Google Scholar] [CrossRef]





Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, X.; Zhang, N.; Du, X.; Zhang, W. Theoretical Modeling and Vibration Isolation Performance Analysis of a Seat Suspension System Based on a Negative Stiffness Structure. Appl. Sci. 2021, 11, 6928. https://doi.org/10.3390/app11156928
Liao X, Zhang N, Du X, Zhang W. Theoretical Modeling and Vibration Isolation Performance Analysis of a Seat Suspension System Based on a Negative Stiffness Structure. Applied Sciences. 2021; 11(15):6928. https://doi.org/10.3390/app11156928
Chicago/Turabian StyleLiao, Xin, Ning Zhang, Xiaofei Du, and Wanjie Zhang. 2021. "Theoretical Modeling and Vibration Isolation Performance Analysis of a Seat Suspension System Based on a Negative Stiffness Structure" Applied Sciences 11, no. 15: 6928. https://doi.org/10.3390/app11156928