
Pareto Effect of LMI for Ship Propulsion



Abstract
:1. Introduction
2. Object Control—Multivariable Object
- -
- —state matrix of the object, represents the dynamics of the system,
- -
- —control matrix of control ‘u’ signal, —control matrix of input ‘w’,
- -
- —output matrix of output signal outputs ‘z’, —output matrix of ‘’ signal, —output matrix of ‘’ signal,
- -
- —transition matrix of signals ‘z’ and ‘u’, —transition matrix of signals ‘z’ and ‘w’, —transition matrix of signals ‘’ and ‘u’, —transition matrix of signals ‘w’ and ‘’, —transition matrix of signals ‘’ and ‘w’, —transition matrix of signals ‘’ and ‘u’,
- -
- ‘’ i ‘’—additional output signals necessary for calculations of and norms.
3. The Norm in Linear Matrix Inequalities
- If a positively symmetric matrix exists ( = , ), the form of LMI condition for the norm has the following form:Specific matrices fulfill the below conditions:
- For the transmittance matrix is an estimate that is the upper boundary, described by a scalar value as stated:For the calculation of norm , transmittance matrix for the closed system can be determined:In the design process, value is an estimate that is the upper boundary of norm . According to the authors, this value can be minimized or taken as a constant.
4. The Norm in Linear Matrix Inequalities
- First form of the condition:
- Second form of the condition:Using the Schur complement, the second form of the LMI condition, describing the norm, has the following form: if there exists a symmetric and positively defined matrix :where the matrix has the dimension of matrix and depends on the signals included in norm .
- If a positively symmetric matrix exists, ( = , ) is the form of LMI condition for norm in the following form:
- Assuming that matrix has the dimension of matrix , and if there exists a symmetric and positively defined matrix (), and if there is a symmetric matrix (), the second form of the LMI condition for norm is shown below:
- Trace matrix must not exceed the estimate from the top of norm, denoted as the scalar , as noted below:
5. Compromise Solution of and Norms in LMI
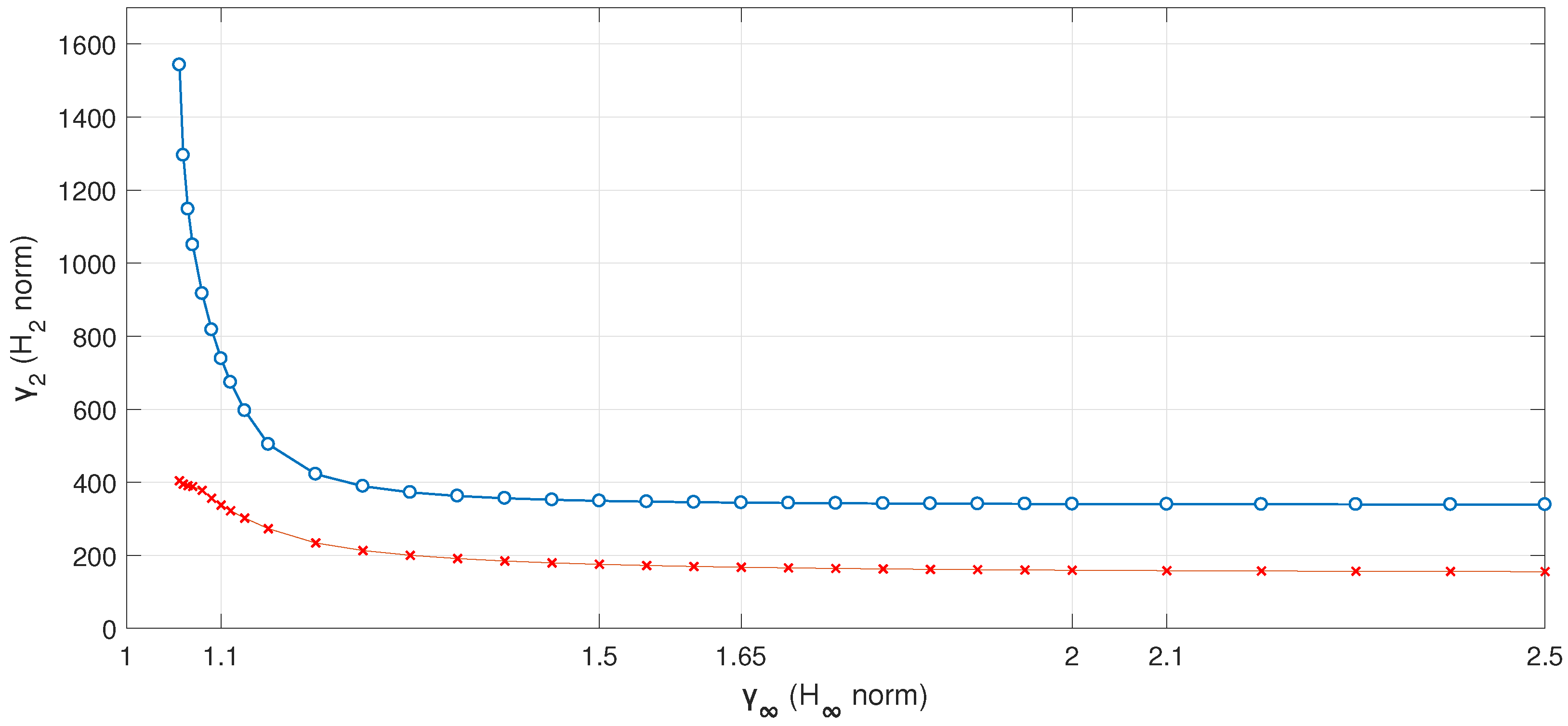
- The first step is to compute the constraint from above the scalar variable . First, the area of the pole placement in the left half-plane of the complex variable s [24] is determined. If there is a symmetric, positively definite matrix , based on this, using the LMI condition for the norm , the scalar variable is determined. The designer assumes that the calculated value = is the upper limit of the mentioned norm.
- The second step is to estimate the scalar variable from above, more precisely to minimize the norm . Determining the relationship (Pareto curve) between the minimum value of the norm and the upper bound on the value of the norm determined in the first step involves determining the range of scalar variables that are the upper bound for the norm under study. In this example, the scalar variable was tested in the range from [1.05:2.5] with a step of 0.05.
6. Results
- 1
- Zero offset , shortest possible control time for a given control deviation value = 5 [%], no or small maximum overshoot (<5 [%] ).
- 2
- Optimal control of steering and propulsion equipment, that is, minimizing energy consumption for the accomplishment of an assigned control task.
- 3
- Obtaining a precise ship trajectory with no course fluctuations.
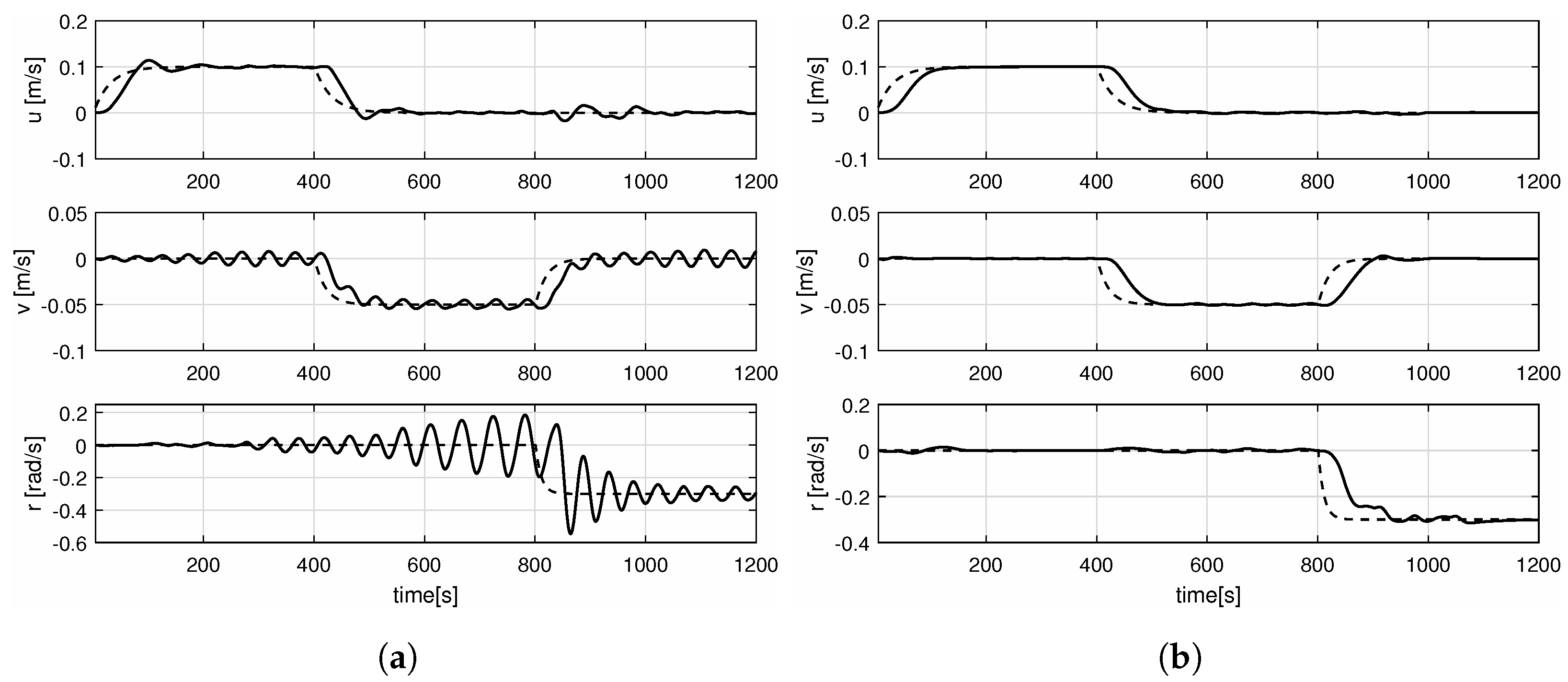
- Comparison of the reference signal with a controlled quantity together with quality criteria (such as control time ) for three vessel speed components, u (longitudinal), v (lateral) and r (rotancional).
- Impact of steering on propulsion and steering equipment, that is, minimizing fuel consumption and minimizing the impact of pollution on the marine environment.
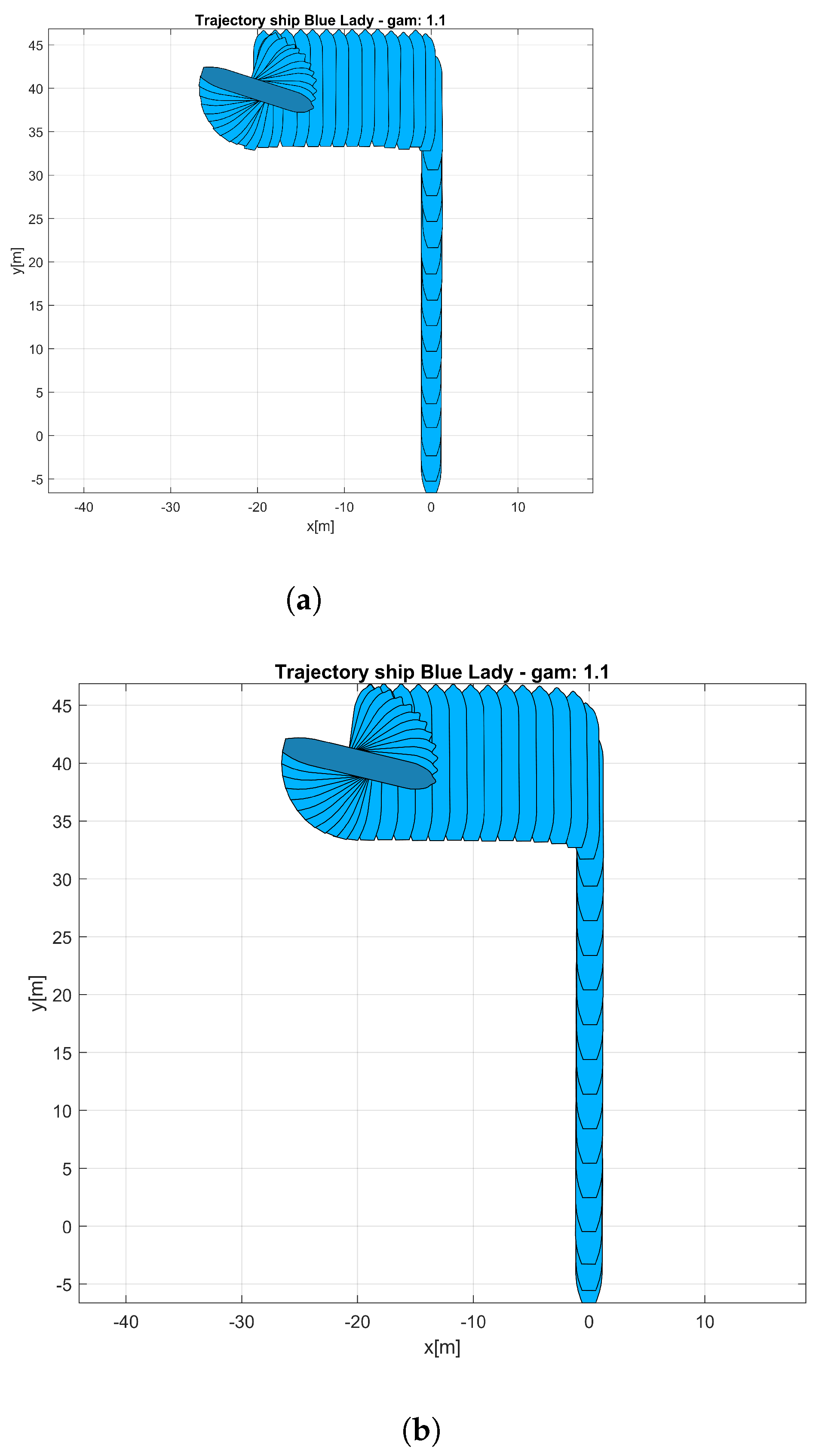
- Effect on plotted ship trajectory. Illustration of control precision accuracy.
6.1. Conclusions for
- -
- Control system for rotational velocity r falls into increasing oscillations until time t = 800 [s], after which they begin to start decreasing, and at time t = 1000 [s] these oscillations are fully suppressed (oscillation amplitude = 0.05 ).
- -
- This proves that the maximum overshoot obtained for rotational velocity is = 78.57 [%].
- -
- Thrusters operate in a chaotic way. For example, the rotation angle of thrusters (alfa d, alfa r) in a short time are changed from one swing limit to the opposite swing limit (from 120 to −120). Additionally, during the manoeuvre, the ship’s main propulsion system was switched on three times, which influenced the course of the speeds u, v, and r. In view of the above and in relation to the assumed test evaluation criteria, the dynamics of the tested system for = 1.1 does not meet the assumed criteria.
- -
- Controller force allocation is significant, especially the value of in the range between [−250, 200], which significantly surpasses the amount of energy required by propulsion-control systems.
6.2. Conclusions for
- -
- Oscillations are within the limits of the set value of control deviation only up to time t = 1047 [s], where after a time of 5 [s], the controlled quantity returns to the limits of control deviation and stabilizes. Nevertheless, the obtained value of maximum overshoot for rotational speed r was only 4.74 [%]. In addition, adjustment times of other speeds were short 118 [s] for longitudinal speed u and 104 [s] for lateral speed v, respectively.
- -
- For control waveforms of controlled devices, one can notice jumps in the controlled values at the moments of tasks of respective velocity components (t = 0; 400; 800 [s]). For lateral velocity task v, there are disturbances, which are the source of oscillations of thruster waveforms (, ) and rotation angles of these thrusters (alfa d, alfa r ). In spite of this, thrusters gently change their state without consuming much energy. Oscillations of these quantities cease when speed-controlled quantity r returns into the limits of the set value of control deviation (t = 1047 [s]). This is the beginning of stabilization of the control system. During the whole manoeuvre, the main propulsion system was not switched on, which is in line with the optimum use of the ship’s propulsion and steering equipment.
- -
- The ship’s trajectory is correct. To sum up, for the complex manoeuvre, the overshoot value was 4.74 [%]. Additionally, the values of determined deviations were equal or close to zero. In connection with the above and with reference to the assumed test evaluation criteria, the dynamics of the tested system for = 2.1 meets the assumed criteria.
- -
- Controller force allocation is acceptable in terms of the amount of energy required by by propulsion-control systems, and is in the range of [−60:60].
7. Conclusions
- -
- The coefficient has a significant influence on dynamics of the system, operation of steering and propulsion equipment and trajectory of the training ship model “Blue Lady”.
- -
- For the investigated multidimensional object, the best of the two selected values of coefficient turned out to be = 2.1 for complex manoeuvres.
- -
- After analysis of the results, it can be assumed that the closer the solution is to the OX abscissa axis, the worse the dynamics of the system.
- -
- For other multidimensional objects, the factor may differ significantly.
- -
- Obtained force values (, , ) prove that a properly selected value of optimizes energy required for propulsion and steering systems which, as per the authors, influences fuel savings of the ship.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| DOAJ | Directory of open access journals |
| TLA | Three letter acronym |
| LD | linear dichroism |
References
- Takahashi, R.; Palhares, R.; Dutra, D.; Goncalves, L. Synthesis and characterization of Pareto-optimal solutions for the mixed. In Proceedings of the IEEE Conference on Decision and Control, Orlando, FL, USA, 4–7 December 2001. [Google Scholar]
- Takahashi, R.; Palhares, R.; Dutra, D.; Goncalves, L. Estimation of Pareto sets in the mixed H2/H∞ control problem. Int. J. Syst. Sci. 2004, 35, 55–67. [Google Scholar] [CrossRef]
- Sánchez, G.; Villasana, M.; Strefezza, M. Multi-objective Pole Placement with Evolutionary Algorithms. In Proceedings of the International Conference on Evolutionary Multi-Criterion Optimization, Matsushima, Japan, 5–8 March 2007. [Google Scholar]
- Poussot-Vassal, C.; Sename, O.; Dugard, L.; Gaspar, P.; Szabo, Z.; Bokor, J. The design of a chassis system based on multi-objective qLPV control. J. Transp. Eng. 2008, 36, 93–97. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Qian, S. Multi-objective Immune Optimization in Dynamic Environments and Its Application to Signal Simulation. In Proceedings of the International Conference on Measuring Technology and Mechatronics Automation, Changchun, China, 9–12 August 2009. [Google Scholar]
- Bal, D.; Kogan, M. Multi-Objective Generalized H2 Control for Optimal Protection from Vibration. In Proceedings of the UKACC 12th International Conference on Control, Sheffield, UK, 5–7 September 2018. [Google Scholar]
- Balandin, D.V.; Kogan, M. Pareto suboptimal controllers in multi-objective disturbance attenuation problems. Automatica 2017, 84, 56–61. [Google Scholar] [CrossRef]
- Balandin, D.; Biryukov, R.; Kogan, M. Localization of Pareto-Optimal Set in Multi-objective Minimax Problems. In Proceedings of the International Conference on Mathematical Modeling and Supercomputer Technologies, Nizhny Novgorod, Russia, 23–27 November 2020. [Google Scholar]
- GÜnes, F.; Uluslu, A.; Mahouti, P. Pareto Optimal Characterization of a Microwave Transistor. IEEE Access 2020, 8, 47900–47913. [Google Scholar] [CrossRef]
- Le, T.A.; Chien, T.V.; Nakhai, M.R.; Le-Ngoc, T. Pareto-Optimal Pilot Design for Cellular Massive MIMO Systems. IEEE Trans. Veh. Technol. 2020, 69, 13206–13215. [Google Scholar] [CrossRef]
- Rybczak, M. Synteza Elektronawigacyjnego Układu Wielowymiarowego Sterowania Statkiem Wykorzystująca Liniowe Nierówności Macierzowe; Uniwersytet Morski w Gdyni: Gdynia, Poland, 2020. [Google Scholar]
- Gierusz, W.; Rybczak, M. Effectiveness of Multidimensional Controllers Designated to Steering of the Motions of Ship at Low Speed. Sensors 2020, 20, 3533. [Google Scholar] [CrossRef] [PubMed]
- Miller, A.; Rybczak, M.; Rak, A. Towards the Autonomy: Control Systems for the Ship in Confined and Open Waters. Sensors 2021, 21, 2286. [Google Scholar] [CrossRef] [PubMed]
- Tomera, M. Swarm intelligence applied to identification of nonlinear ship steering model. In Proceedings of the 2015 IEEE 2nd International Conference on Cybernetics (CYBCONF), Gdynia, Poland, 24–26 June 2015; pp. 133–139. [Google Scholar]
- Kula, K.S.; Tomera, M. Control system of training ship keeping the desired path consisting of straight-lines and circular arcs. Int. J. Mar. Navig. Saf. Sea Transp. 2017, 11, 711–719. [Google Scholar] [CrossRef] [Green Version]
- Tomera, M. Path Controller for Ships with Switching Approach. In Advanced, Contemporary Control; Springer: Cham, Switzerland, 2020; pp. 1519–1530. [Google Scholar]
- Boyd, S.; El Ghaoui, L.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in System and Control Theory; Society for Industrial and Applied Mathematics (SIAM): Philadelphia, PA, USA, 1994; Volume 15. [Google Scholar]
- Duan, G.R.; Yu, H. Linear Matrix Inequalities in Control Systems: Analysis, Design and Applications; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Galas, Z.; Nykowski, I.; Zolkiewski, Z. Programowanie wielokryterialne. In Państwowe Wydawnictwo Ekonomiczne; Państwowe Wydawnictwo Ekonomiczne: Warsaw, Poland, 1987. [Google Scholar]
- Kaliszewski, I. Wielokryterialne Podejmowanie Decyzji: Obliczenia MięKkie dla ZłożOnych Probelmów Decyzyjnych; Wydawnictwo Naukowo—Techniczne: Katowice, Poland, 2008. [Google Scholar]
- Lisowski, J. Computational intelligence methods in the safe ship control process. Pol. Marit. Res. 2001, 8, 18–24. [Google Scholar]
- Lisowski, J.; Mohamed-Seghir, M. Comparison of Computational Intelligence Methods Based on Fuzzy Sets and Game Theory in the Synthesis of Safe Ship Control Based on Information from a Radar ARPA System. Remote Sens. 2019, 11, 82. [Google Scholar] [CrossRef] [Green Version]
- Sultan, K.S.; Emam, W. The Combined-Unified Hybrid Censored Samples from Pareto Distribution: Estimation and Properties. Appl. Sci. 2021, 11, 6000. [Google Scholar] [CrossRef]
- Scherer, C.i.; Wieland, S. Linear Matrix Inequalities in Control Lecture Notes; Dutch Institute for Systems and Control: Delft, The Netherlands, 2000. [Google Scholar]
- Sturm, J.F. Using sedumi 1.02, a matlab toolbox for optimization over symmetric cones. Optim. Methods Softw. 1999, 11, 625–653. [Google Scholar] [CrossRef]
- Ravat, A.K.; Dhawan, A.; Tiwari, M. LMI and YALMIP: Modeling and Optimization Toolbox in MATLAB. In Advances in VLSI, Communication, and Signal Processing; Springer: Singapore, 2021; pp. 507–515. [Google Scholar]
- Łebkowski, A. Analysis of the use of electric drive systems for crew transfer vessels servicing offshore wind farms. Energies 2020, 13, 1466. [Google Scholar] [CrossRef] [Green Version]
- Gong, Z.; Zhong, P.; Hu, W.; Hua, Y. Joint Learning of the Center Points and Deep Metrics for Land-Use Classification in Remote Sensing. Remote Sens. 2019, 11, 76. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Name of Signal | Range | Unit |
|---|---|---|---|
| ng | Main propeller rotational speed | (−200; +480) | [rpm] |
| delta | Rudder deflection angle | (−35; +35) | [deg] |
| sstd | Relative thrust of the bow tunnel thruster | (−1, +1) | [-] |
| sstr | Relative thrust of the stern tunnel thruster | (−1, +1) | [-] |
| ssod | Relative thrust of the bow rotary thruster | (0, +1) | [-] |
| alfa d | Bow rotary thruster deflection angle | (−120, +120) | [deg] |
| ssor | Relative thrust of the stern rotary thruster | (0, +1) | [-] |
| alfa r | Stern rotary thruster deflection angle | (−120, +120) | [deg] |
| Longitudinal u | Lateral v | Rotational r | ||||
|---|---|---|---|---|---|---|
| Parameter | 1.1 | 2.1 | 1.1 | 2.1 | 1.1 | 2.1 |
| [s] | 163 | 118 | ∞ | 104 | ∞ | 180 |
| [%] | 15.04 | 0.91 | 9.90 | 1.92 | 78.57 | 4.74 |
| e [m/s] | 0 | 0 | 0 | 0 | 0 | 0 |
| [s] | 40 | 65 | 55 | 60 | 54 | 95 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rybczak, M.; Podgórski, K. Pareto Effect of LMI for Ship Propulsion. Appl. Sci. 2021, 11, 7297. https://doi.org/10.3390/app11167297
Rybczak M, Podgórski K. Pareto Effect of LMI for Ship Propulsion. Applied Sciences. 2021; 11(16):7297. https://doi.org/10.3390/app11167297
Chicago/Turabian StyleRybczak, Monika, and Kamil Podgórski. 2021. "Pareto Effect of LMI for Ship Propulsion" Applied Sciences 11, no. 16: 7297. https://doi.org/10.3390/app11167297
APA StyleRybczak, M., & Podgórski, K. (2021). Pareto Effect of LMI for Ship Propulsion. Applied Sciences, 11(16), 7297. https://doi.org/10.3390/app11167297