
Online Efficiency Optimization and Speed Sensorless Control of Single-Phase Induction Motors



Abstract
:1. Introduction
2. Mathematical Model of SPIM
2.1. Stator Current Ratio
2.2. Electrical Torque
2.3. Power Losses in SPIM
- Stator copper losses. Copper losses in the main and auxiliary stator windings are given by [21]:Substituting the auxiliary winding current in the right-hand side of (9) with the expression (as per (1)), the stator copper losses can be expressed as:
- Rotor copper losses. Copper losses in the rotor winding can be written as:
- Core losses. Core losses which include hysteresis and eddy current losses are given by [21]:
- 4.
- Stray load losses: Stray load losses are due to changes made in the flux distribution and eddy currents given by the following empirical expression:
3. Sensorless Speed Estimation
4. Energy Efficiency Optimization
4.1. Optimal Energy Efficiency Condition
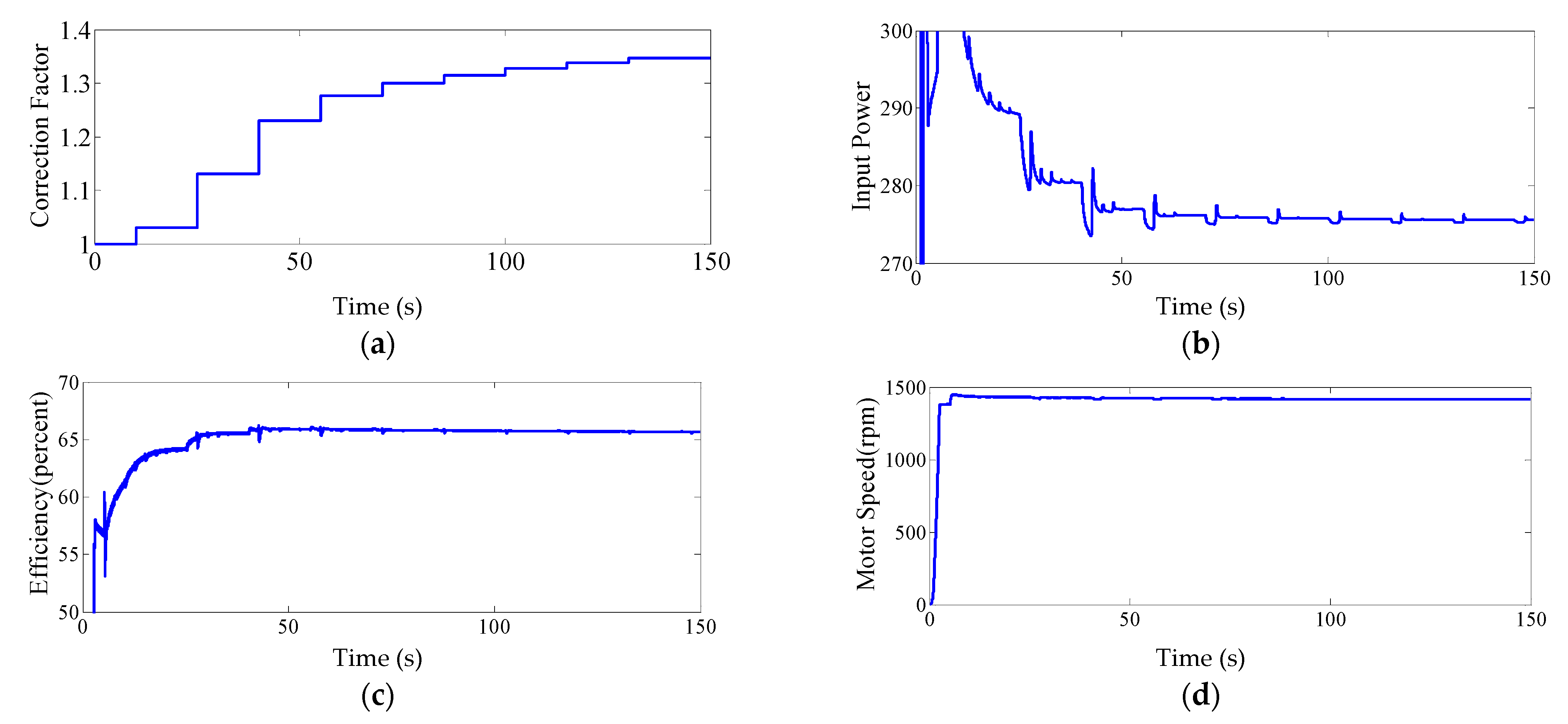
4.2. Gradient Descent Algorithm
- The initial value of K is set to 1, which is the case where no correction is yet made to Ks. The input power (Pin) is measured for this case. Then, the initial value of K variation () is set to an arbitrary value, the iteration index (i) is set to 1, the convergence criterion is ε and the convergence factor is .
- The values of K are updated via following equation:
- After a specified time, which takes into account the time required before the changes made in Ks appear in the motor operation and motor reaches to a new stable state, the new input power (Pin) is measured.
- Inasmuch as after passing through the transient state, the motor speed will be regulated and reaches its set value; the load power, therefore will be equal to its previous value. As a result, changes in input power will be equal to changes in loss. Therefore, the algorithm is expected to work equally by using the input power instead.In other words:
- 5.
- The approximated power loss gradient is calculated as follows:
- 6.
- In order to approach the minimum point of power loss, K must change in the opposite direction of power loss gradient i.e.,
- 7.
- If ΔK is smaller than ε, the algorithm will be stopped. Otherwise, the iteration index (i) is increased by one and the algorithm will return to step 2.
5. Control Scheme Implementation
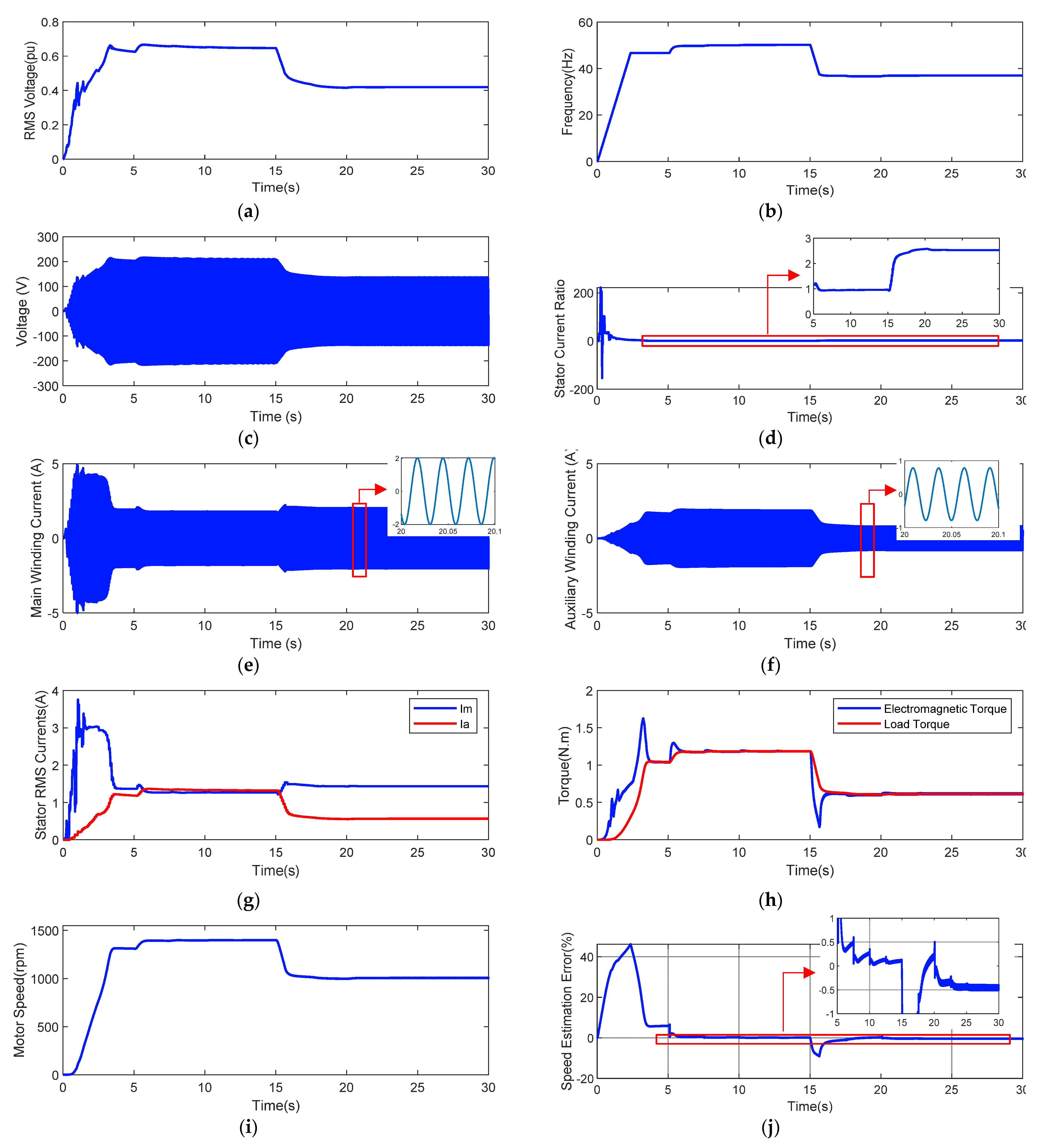
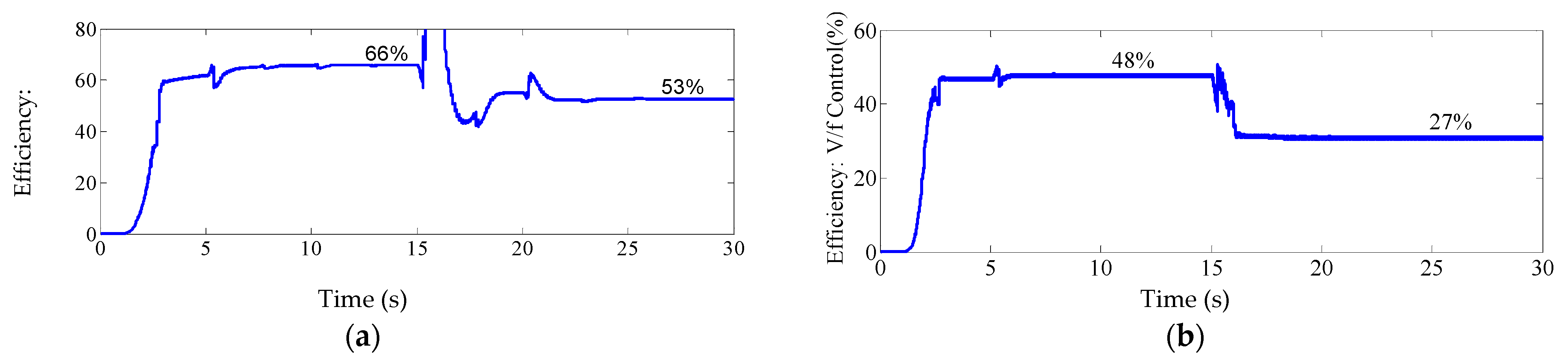
6. Simulation Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| Rsm | Main winding resistance |
| Llsm | Main winding leakage inductance |
| Im | Main winding current |
| Rsa | Auxiliary winding resistance |
| Llsa | Auxiliary winding leakage inductance |
| C | Auxiliary winding series capacitance |
| Ia | Auxiliary winding current |
| a | Turns ratio of auxiliary to main winding |
| R′r | Rotor resistance |
| L′lr | Rotor leakage inductance |
| Lms | Magnetizing inductance |
| cfe | Iron loss coefficient |
| cstr | Stray loss coefficient |
| ωe | Supply frequency |
| ωm | Rotor speed |
| ωm,est | Estimated rotor speed |
| P | Number of stator poles |
| s | Rotor slip |
| Emf | Forward main stator winding emf |
| Emb | Backward main stator winding emf |
References
- De Correa, M.B.R.; Jacobina, C.B.; Lima, A.M.N.; de Silva, E.R.C. Rotor-flux-oriented control of a single-phase induction motor drive. IEEE Trans. Ind. Electron. 2000, 47, 832–841. [Google Scholar] [CrossRef]
- Arpit, G.; Singh, H.P.; Pandey, K. Advance speed control of three phase induction motor using field oriented control method. Mater. Today Proc. 2021. [Google Scholar] [CrossRef]
- Akhtar, M.J.; Behera, R.K. Space Vector Modulation for Distributed Inverter-Fed Induction Motor Drive for Electric Vehicle Application. IEEE J. Emerg. Sel. Top. Power Electron. 2021, 9, 379–389. [Google Scholar] [CrossRef]
- Aktas, M.; Awaili, K.; Ehsani, M.; Arisoy, A. Direct torque control versus indirect field-oriented control of induction motors for electric vehicle applications. Eng. Sci. Technol. Int. J. 2020, 23, 1134–1143. [Google Scholar] [CrossRef]
- El Ouanjli, N.; Derouich, A.; El Ghzizal, A.; Motahhir, S.; Chebabhi, A.; El Mourabit, Y.; Taoussi, M. Modern improvement techniques of direct torque control for induction motor drives—A review. Prot. Control. Mod. Power Syst. 2019, 4, 11. [Google Scholar] [CrossRef] [Green Version]
- Dòria-Cerezo, A.; Olm, J.M.; Repecho, V.; Biel, D. Complex-valued sliding mode control of an induction motor. IFAC-Pap. 2020, 53, 5473–5478. [Google Scholar] [CrossRef]
- Fu, X.; Li, S. A Novel Neural Network Vector Control Technique for Induction Motor Drive. IEEE Trans. Energy Convers. 2015, 30, 1428–1437. [Google Scholar] [CrossRef]
- Quintero-Manríquez, E.; Sanchez, E.N.; Antonio-Toledo, M.E.; Muñoz, F. Neural control of an induction motor with regenerative braking as electric vehicle architecture. Eng. Appl. Artif. Intell. 2021, 104, 104275. [Google Scholar] [CrossRef]
- Sahu, A.; Mohanty, K.B.; Mishra, R.N. Development and experimental realization of an adaptive neural-based discrete model predictive direct torque and flux controller for induction motor drive. Appl. Soft Comput. 2021, 108, 107418. [Google Scholar] [CrossRef]
- Sonnaillon, M.O.; Bisheimer, G.; de Angelo, C.; Solsona, J.; Garcia, G. Mechanical-sensorless induction motor drive based only on DC-link measurements. IEE Proc.-Electr. Power Appl. 2006, 153, 815–822. [Google Scholar] [CrossRef]
- Nandi, S.; Ahmed, S.; Toliyat, H.A.; Bharadwaj, R.M. Selection criteria of induction machines for speed-sensorless drive applications. IEEE Trans. Ind. Appl. 2003, 39, 704–712. [Google Scholar] [CrossRef]
- Kadrine, A.; Tir, Z.; Malik, O.P.; Hamida, M.A.; Reatti, A.; Houari, A. Adaptive non-linear high gain observer based sensorless speed estimation of an induction motor. J. Frankl. Inst. 2020, 357, 8995–9024. [Google Scholar] [CrossRef]
- Yang, Z.; Ding, Q.; Sun, X.; Lu, C.; Zhu, H. Speed sensorless control of a bearingless induction motor based on sliding mode observer and phase-locked loop. ISA Trans. 2021. [Google Scholar] [CrossRef] [PubMed]
- Sruthi, M.P.; Nagamani, C.; Ilango, G.S. An improved algorithm for direct computation of optimal voltage and frequency for induction motors. Eng. Sci. Technol. Int. J. 2017, 20, 1439–1449. [Google Scholar] [CrossRef]
- Uddin, M.N.; Nam, S.W. New online loss-minimization-based control of an induction motor drive. IEEE Trans. Power Electron. 2008, 23, 926–933. [Google Scholar] [CrossRef]
- Rolle, B.; Sawodny, O. In-Vehicle System Identification of an Induction Motor Loss Model. IFAC-Pap. 2020, 53, 14073–14078. [Google Scholar] [CrossRef]
- Bruno, A.; Caruso, M.; Tommaso, A.O.D.; Miceli, R.; Nevoloso, C.; Viola, F. Simple and Flexible Power Loss Minimizer With Low-Cost MCU Implementation for High-Efficiency Three-Phase Induction Motor Drives. IEEE Trans. Ind. Appl. 2021, 57, 1472–1481. [Google Scholar] [CrossRef]
- Tang, J.; Yang, Y.; Blaabjerg, F.; Chen, J.; Diao, L.; Liu, Z. Parameter Identification of Inverter-Fed Induction Motors: A Review. Energies 2018, 11, 2194. [Google Scholar] [CrossRef] [Green Version]
- Farhani, F.; Zaafouri, A.; Chaari, A. Real time induction motor efficiency optimization. J. Frankl. Inst. 2017, 354, 3289–3304. [Google Scholar] [CrossRef]
- Almani, M.N.; Hussain, G.A.; Zaher, A.A. An Improved Technique for Energy-Efficient Starting and Operating Control of Single Phase Induction Motors. IEEE Access 2021, 9, 12446–12462. [Google Scholar] [CrossRef]
- Mademlis, C.; Kioskeridis, I.; Theodoulidis, T. Optimization of single-phase induction Motors-part I: Maximum energy efficiency control. IEEE Trans. Energy Convers. 2005, 20, 187–195. [Google Scholar] [CrossRef]
- Zahedi, B.; Vaez-Zadeh, S. Efficiency Optimization Control of Single-Phase Induction Motor Drives. IEEE Trans. Power Electron. 2009, 24, 1062–1070. [Google Scholar] [CrossRef]
- Ebrahim, O.S.; Badr, M.A.; Elgendy, A.S.; Jain, P.K. ANN-Based Optimal Energy Control of Induction Motor Drive in Pumping Applications. IEEE Trans. Energy Convers. 2010, 25, 652–660. [Google Scholar] [CrossRef]
- Qi, X. Rotor resistance and excitation inductance estimation of an induction motor using deep-Q-learning algorithm. Eng. Appl. Artif. Intell. 2018, 72, 67–79. [Google Scholar] [CrossRef]
- Snyman, J.A.; Wilke, D.N. Practical Mathematical Optimization: Basic Optimization Theory and Gradient-Based Algorithms; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit | |
|---|---|---|---|
| Nominal Values | Voltage | 220 | V |
| Frequency | 50 | Hz | |
| Power | 0.5 × 746 | W | |
| Speed | 1440 | rpm | |
| Load Torque | 2.4 | N·m | |
| Main Winding Stator | Resistance | 15 | Ω |
| Leakage Inductance | 40 | mH | |
| Main Winding Rotor | Resistance | 12.1 | Ω |
| Leakage Inductance | 48.4 | mH | |
| Auxiliary Winding Stator | Resistance | 16.5 | Ω |
| Leakage Inductance | 48.4 | mH | |
| Series capacitance | 18 | μF | |
| Main Mutual Inductance | 350 | mH | |
| Turns ratio of auxiliary to main winding | 1.1 | - | |
| Inertia | 0.01 | Kg·m2 | |
| Iron Loss Equivalent Resistance | 1000 | Ω | |
| Parameter | Value | |
|---|---|---|
| PI frequency controller | Proportional Coefficient, Kp | 9 × 10−4 |
| Integrator Coefficient, Ki | 5 | |
| PI voltage controller | Proportional Coefficient, Kp | 0.108 |
| Integrator Coefficient, Ki | 0.862 | |
| Gradient descent algorithm | Time Delay | 5 s |
| convergence criteria (ε) | 0.1 | |
| convergence coefficient (λ) | 0.01 | |
| Initial value of corrective factor variation (ΔK) | 0.05 | |
| Neural network | Sample Time | 0.01 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Golsorkhi, M.S.; Binandeh, H.; Savaghebi, M. Online Efficiency Optimization and Speed Sensorless Control of Single-Phase Induction Motors. Appl. Sci. 2021, 11, 8863. https://doi.org/10.3390/app11198863
Golsorkhi MS, Binandeh H, Savaghebi M. Online Efficiency Optimization and Speed Sensorless Control of Single-Phase Induction Motors. Applied Sciences. 2021; 11(19):8863. https://doi.org/10.3390/app11198863
Chicago/Turabian StyleGolsorkhi, Mohammad S., Hadi Binandeh, and Mehdi Savaghebi. 2021. "Online Efficiency Optimization and Speed Sensorless Control of Single-Phase Induction Motors" Applied Sciences 11, no. 19: 8863. https://doi.org/10.3390/app11198863
APA StyleGolsorkhi, M. S., Binandeh, H., & Savaghebi, M. (2021). Online Efficiency Optimization and Speed Sensorless Control of Single-Phase Induction Motors. Applied Sciences, 11(19), 8863. https://doi.org/10.3390/app11198863