
Trigger-Based Dexterous Operation with Multimodal Sensors for Soft Robotic Hand



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Multimodal Sensors
2.1. The Layout of Multimodal Sensors
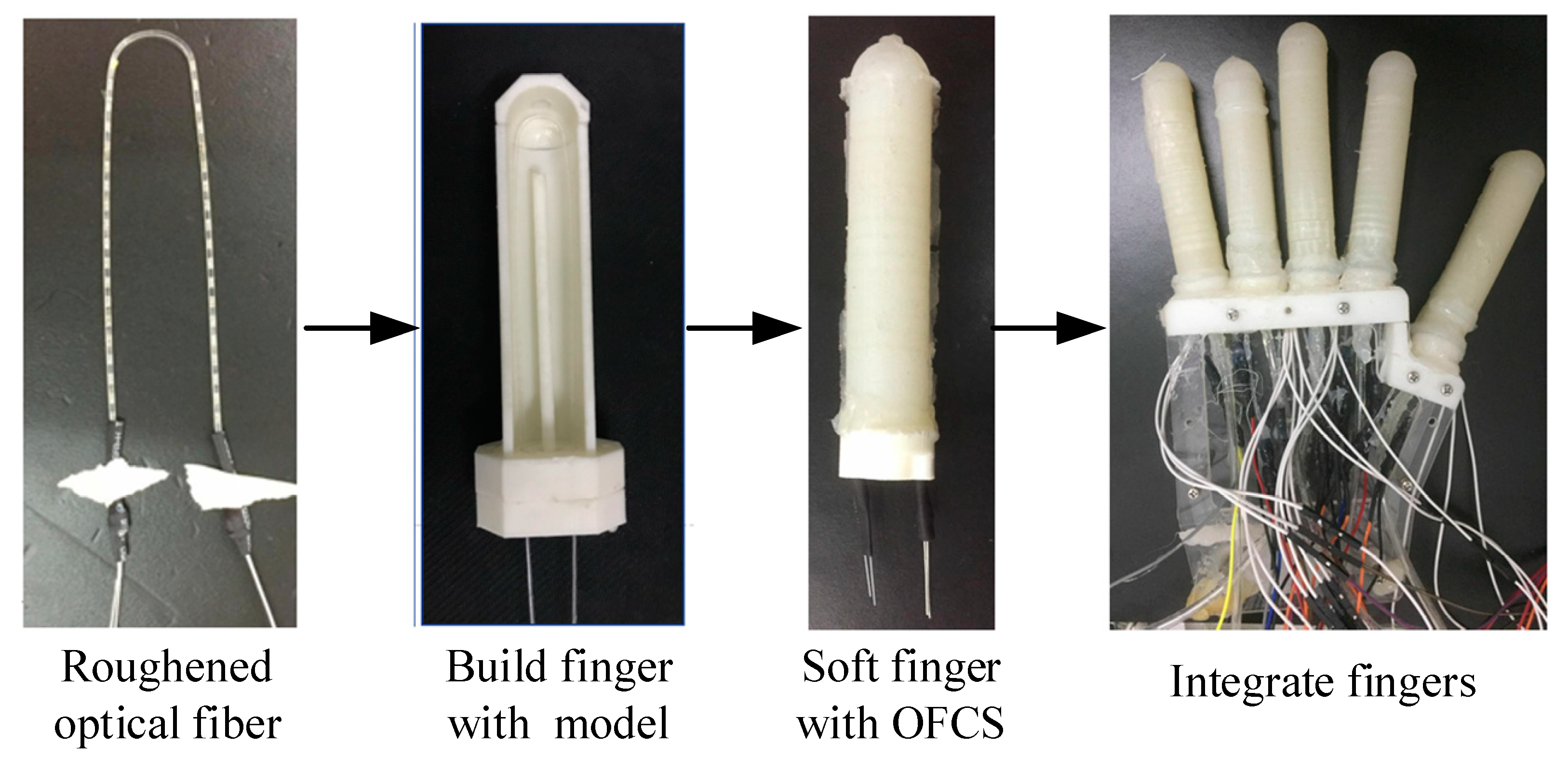
2.2. Curvature Detection Sensors
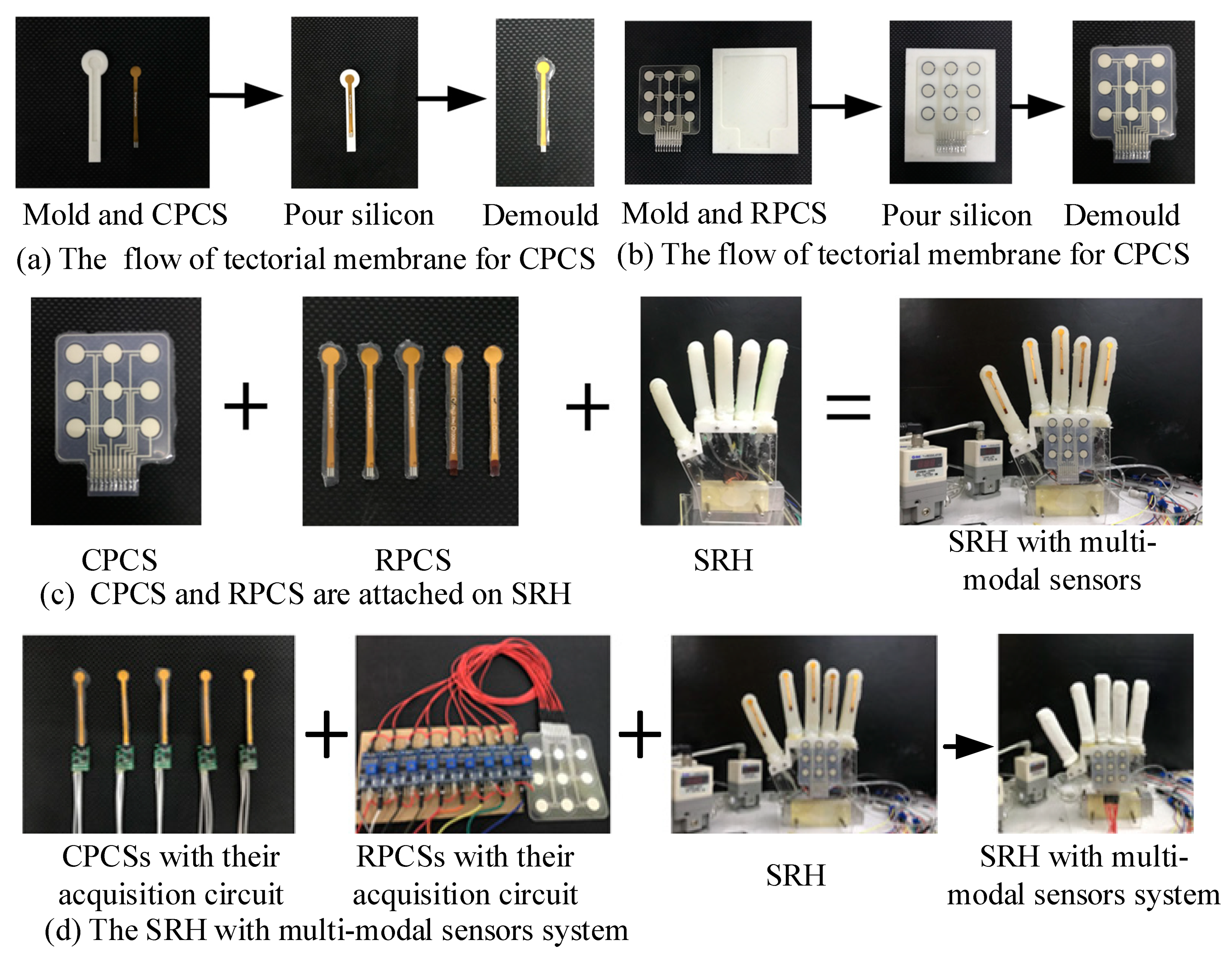
2.3. Touch Force Detection Sensors
3. TDO Strategy
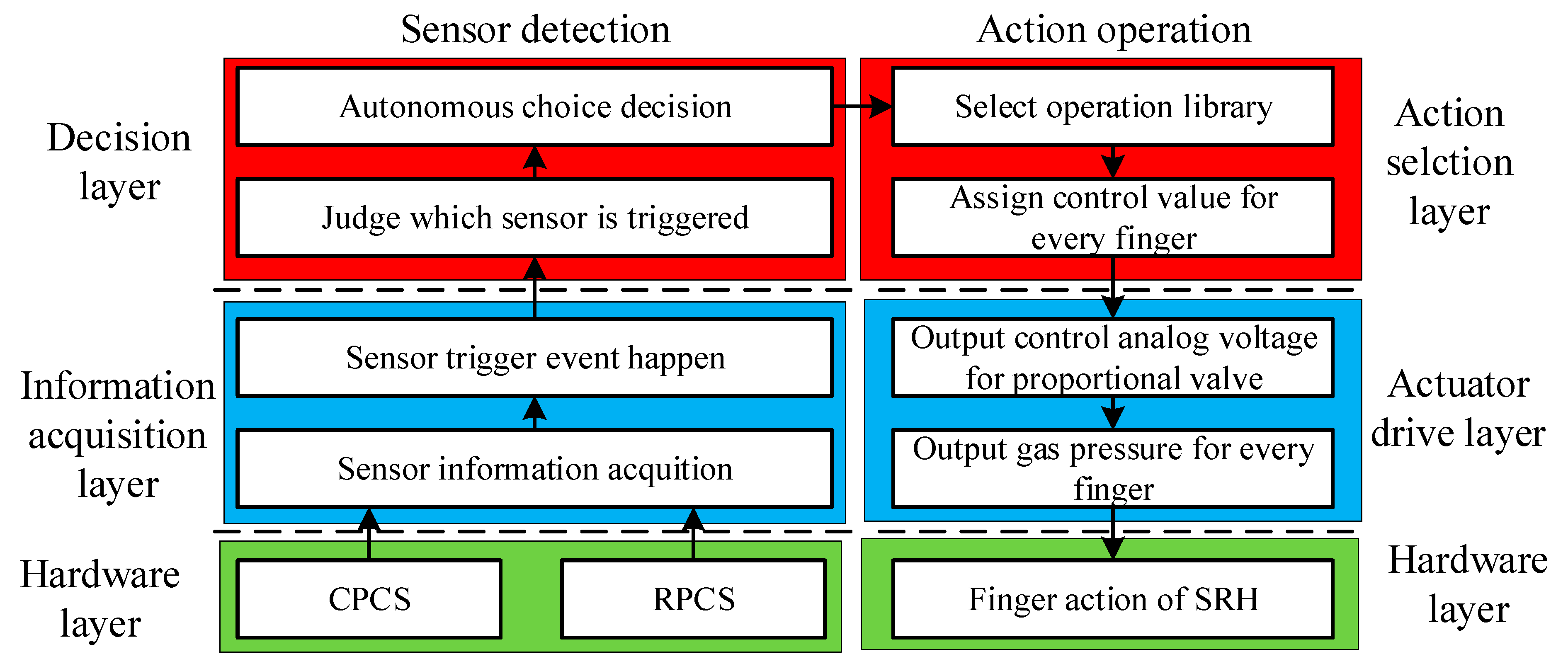
3.1. The Framework of TDO
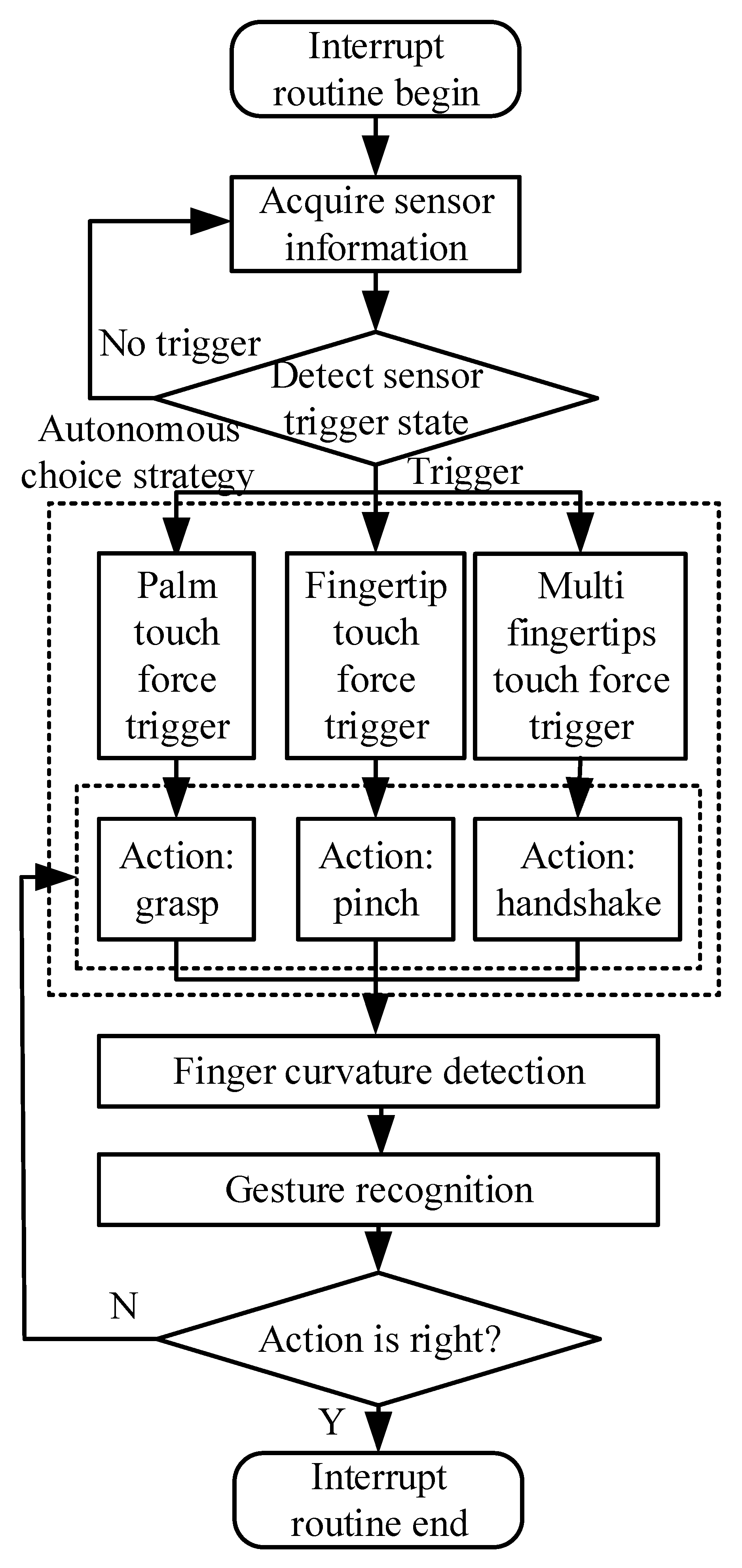
3.2. The Implementation of TDO
4. Experiment and Results
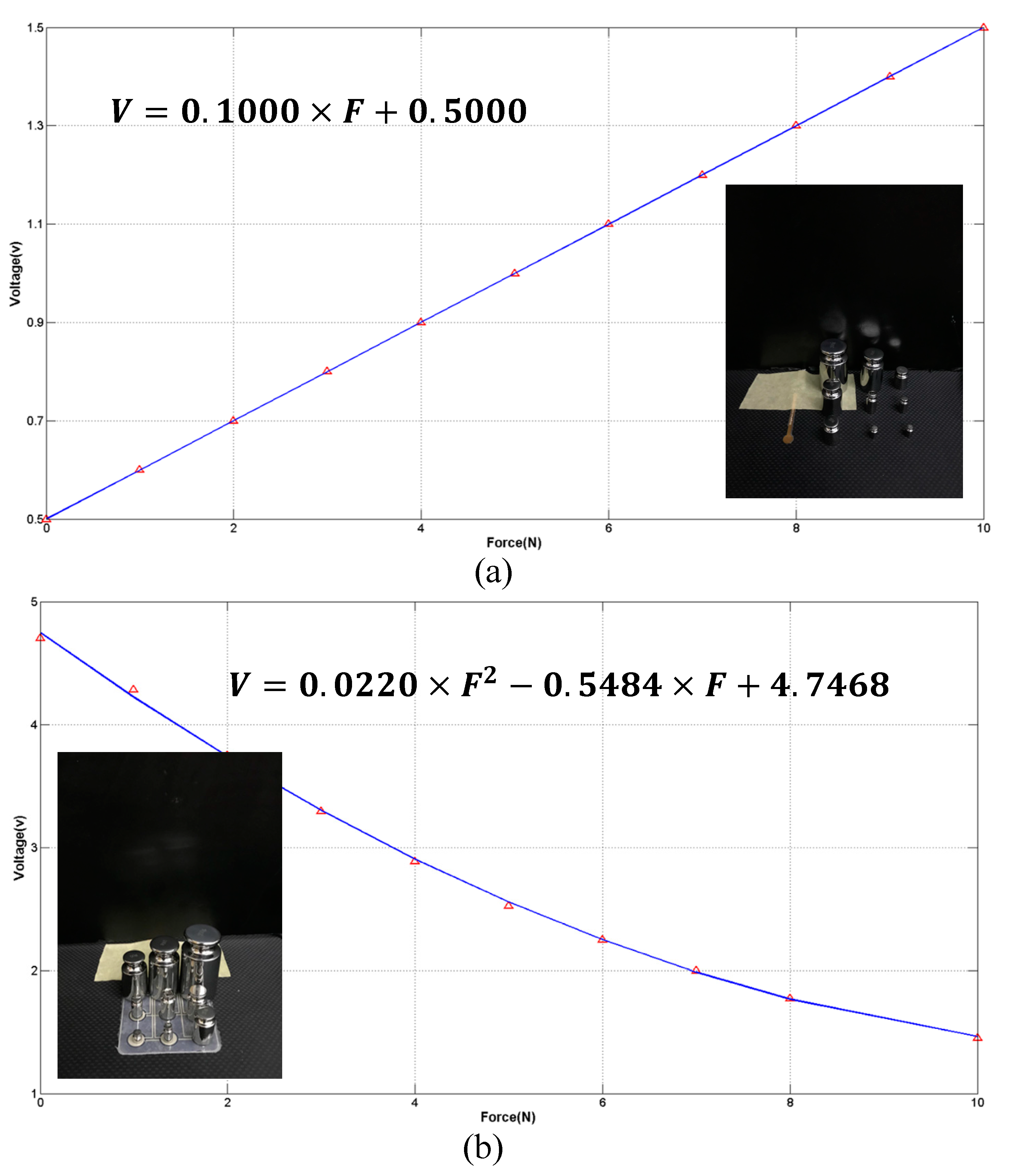
4.1. The Calibration of Touch Force Detection Sensors
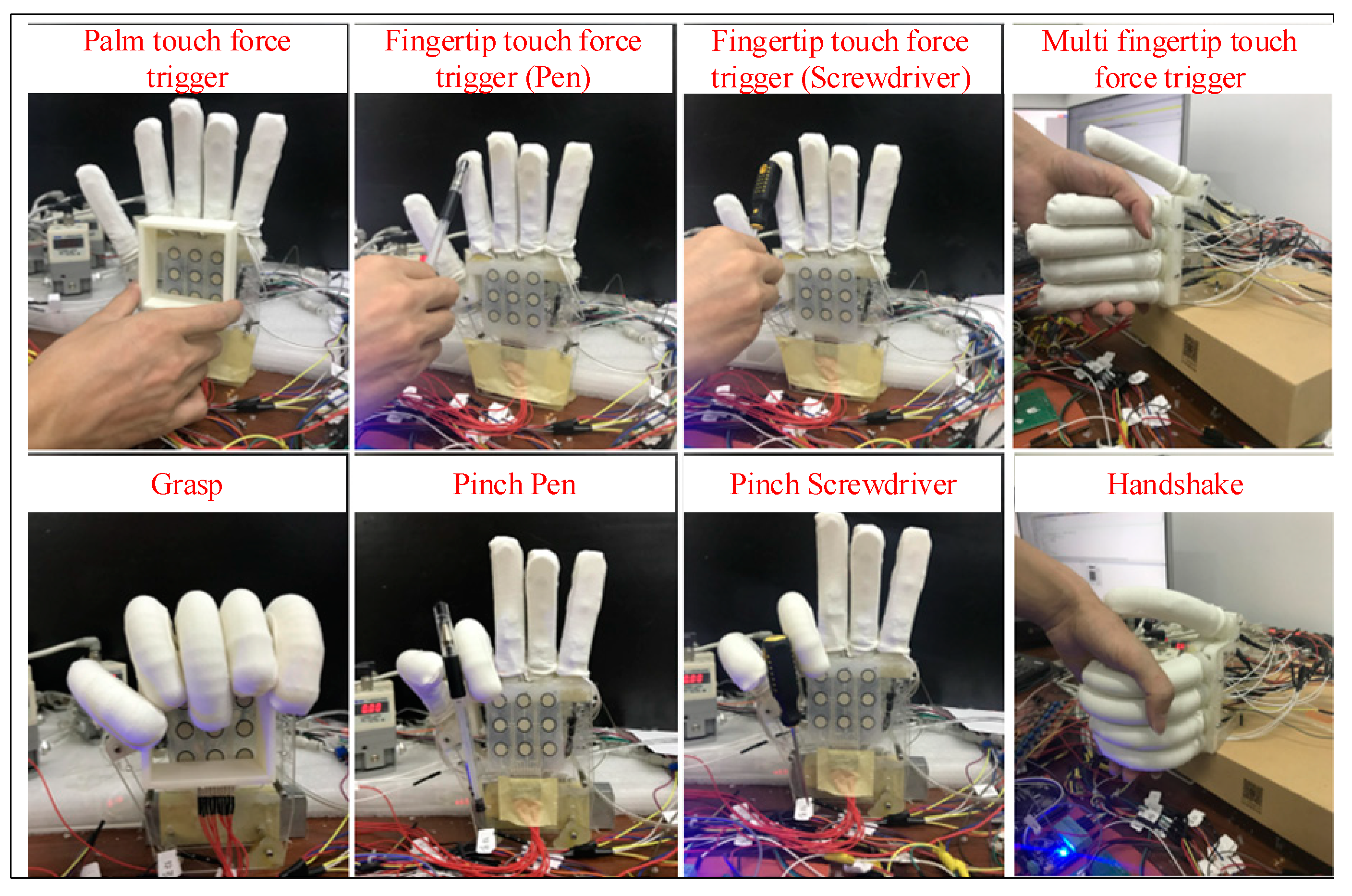
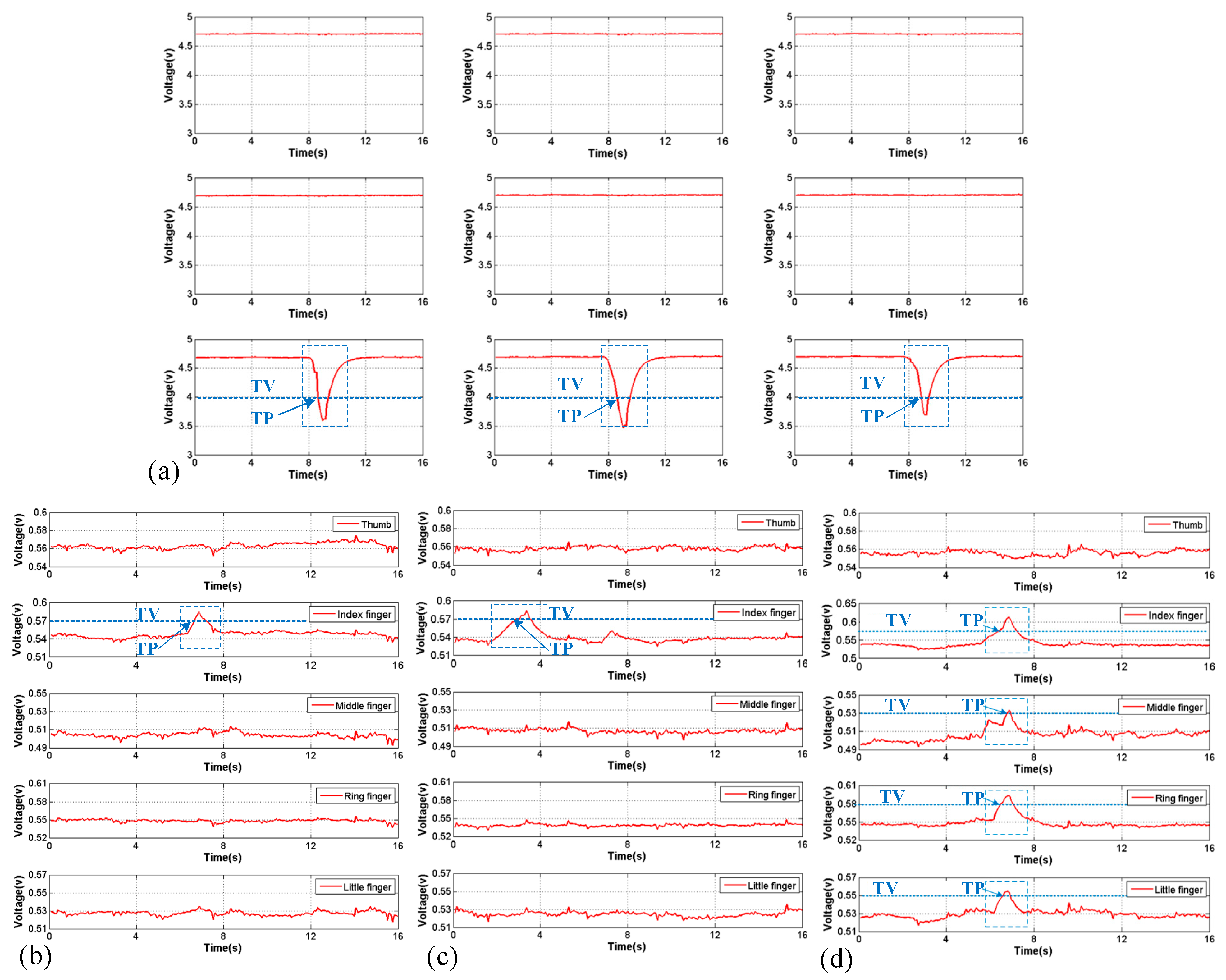
4.2. TDO Validation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Secco, E.L.; Mchugh, D.; Reid, D.; Nagar, A.K. Development of an Intuitive EMG Interface for Multi-dexterous Robotic Hand. In Proceedings of the 2019 International Conference on Wireless Mobile Communication and Healthcare(ICWMCH), Dublin, Ireland, 14–15 November 2019; pp. 201–211. [Google Scholar]
- Jia, P.; Wu, L.; Wang, G.; Geng, W.N.; Zhang, N. Grasping Torque Optimization for a Dexterous Robotic Hand Using the Linearization of Constraints. Math. Probl. Eng. 2019, 2019, 5235109. [Google Scholar] [CrossRef]
- Wang, H.; Abu-Dakka, F.J.; Le, T.N.; Kyrki, V.; Xu, H. A Novel Design of Soft Robotic Hand with a Human-inspired Soft Palm for Dexterous Grasping. arXiv 2020, arXiv:2009.00979. [Google Scholar]
- Abondance, S.; Teeple, C.B.; Wood, R.J. A dexterous soft robotic hand for delicate in-hand manipulation. IEEE Robot. Autom. Lett. 2020, 5, 5502–5509. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, T.; Yamayoshi, I.; Hong, D. Dexterity, Sensitivity and Versatility: An Under Actuated Robotic Hand with Mechanical Intelligence and Proprioceptive Actuation. Int. J. Hum. Robot. 2020, 17, 2050006. [Google Scholar] [CrossRef]
- Wang, T.; Yang, C.; Kirchner, F.; Du, P.; Sun, F.; Fang, B. Multimodal grasp data set: A novel visual–tactile data set for robotic manipulation. Int. J. Adv. Robot. Syst. 2019, 16, 172988141882157. [Google Scholar] [CrossRef] [Green Version]
- GUO, R.; SHENG, L.; GONG, H.; LIU, J. Liquid metal spiral coil enabled soft electromagnetic actuator. Sci. China Technol. Sci. 2018, 61, 516–521. [Google Scholar] [CrossRef]
- Han, L.; Ding, J.; Wang, S.; Xu, J.; Yuan, N.; Cheng, G.; Liu, Z. Multi-functional stretchable and flexible sensor array to determine the location, shape, and pressure: Application in a smart robot. Sci. China Technol. Sci. 2018, 61, 1137–1143. [Google Scholar] [CrossRef]
- Shahid, T.; Gouwanda, D.; Nurzaman, S.G.; Gopalai, A.A. Moving toward Soft Robotics: A Decade Review of the Design of Hand Exoskeletons. Biomimetics 2018, 3, 17. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tan, N.; Gu, X.; Ren, H. Simultaneous Robot-World, Sensor-Tip, and Kinematics Calibration of an Underactuated Robotic Hand With Soft Fingers. IEEE Access 2018, 6, 22705–22715. [Google Scholar] [CrossRef]
- Sun, Y.; Zhang, Q.; Chen, X. Design and analysis of a flexible robotic hand with soft fingers and a changeable palm. Adv. Robot. 2020, 34, 1041–1054. [Google Scholar] [CrossRef]
- Deimel, R.; Brock, O. A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 2016, 35, 161–185. [Google Scholar] [CrossRef] [Green Version]
- Deimel, R.; Radke, M.; Brock, O. Mass control of pneumatic soft continuum actuators with commodity components. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Sys-tems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 774–779. [Google Scholar]
- Tian, M.; Yu, X.; Wang, X.; Chen, J.; Zhao, W. Design and Experimental Research of Pneumatic Soft Humanoid Robot Hand. In Robot Intelligence Technology and Applications 4; Springer: Cham, Switzerland, 2017; pp. 469–478. [Google Scholar]
- Zhou, J.; Yi, J.; Chen, X.; Liu, Z.; Wang, Z. BCL-13: A 13-DOF Soft Robotic Hand for Dexterous Grasping and In-Hand Manipulation. IEEE Robot. Autom. Lett. 2018, 3, 3379–3386. [Google Scholar] [CrossRef]
- Mohd Faudzi, A.A.; Ooga, J.; Goto, T.; Takeichi, M.; Suzumori, K. Index Finger of a Human-Like Robotic Hand Using Thin Soft Muscles. IEEE Robot. Autom. Lett. 2018, 3, 92–99. [Google Scholar] [CrossRef]
- Feng, N.; Shi, Q.; Wang, H.; Gong, J.; Liu, C.; Lu, Z. A soft robotic hand: Design, analysis, sEMG control, and experiment. Int. J. Adv. Manuf. Tech. 2018, 97, 319–333. [Google Scholar] [CrossRef]
- Devi, M.A.; Udupa, G.; Sreedharan, P. A novel underactuated multi-fingered soft robotic hand for prosthetic application. Robot. Autom. Syst. 2018, 100, 267–277. [Google Scholar]
- Zhao, H.; O’Brien, K.; Li, S.; Shepherd, R.F. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides. Sci. Robot. 2016, 1, eaai7529. [Google Scholar] [CrossRef] [Green Version]
- Tavakoli, M.; Lopes, P.; Lourenco, J.; Rocha, R.P.; Giliberto, L.; de Almeida, A.T.; Majidi, C. Autonomous Selection of Closing Posture of a Robotic Hand Through Embodied Soft Matter Capacitive Sensors. IEEE Sens. J. 2017, 17, 5669–5677. [Google Scholar] [CrossRef]
- Maniscalco, U.; Infantino, I. Soft sensors to measure somatic sensations and emotions of a humanoid robot. Ser. Adv. Math. Appl. Sci. 2019, 89, 241–248. [Google Scholar]
- To, C.; Hellebrekers, T.L.; Park, Y.L. Highly stretchable optical sensors for pressure, strain, and curvature measurement. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 5898–5903. [Google Scholar]
- Gu, H.; Zhang, Y.; Fan, S.; Jin, M.; Liu, H. Grasp Configurations Optimization of Dexterous Robotic Hand Based on Haptic Exploration Information. Int. J. Hum. Robot. 2017, 14, 1750013. [Google Scholar] [CrossRef]
- Homberg, B.S.; Katzschmann, R.K.; Dogar, M.R.; Rus, D. Robust proprioceptive grasping with a soft robot hand. Autom. Robot. 2019, 43, 681–696. [Google Scholar] [CrossRef] [Green Version]
- Gupta, A.; Eppner, C.; Levine, S.; Abbeel, P. Learning Dexterous Manipulation for a Soft Robotic Hand from Human Demonstration. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Sys-tems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 3786–3793. [Google Scholar]
- Huang, H.; Lin, J.; Wu, L. Machine learning based multi-modal information perception for soft robotic hand. Tsinghua Sci. Technol. 2019, 25, 255–269. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, H.; Lin, J.; Wu, L.; Wen, Z.; Dong, M. Trigger-Based Dexterous Operation with Multimodal Sensors for Soft Robotic Hand. Appl. Sci. 2021, 11, 8978. https://doi.org/10.3390/app11198978
Huang H, Lin J, Wu L, Wen Z, Dong M. Trigger-Based Dexterous Operation with Multimodal Sensors for Soft Robotic Hand. Applied Sciences. 2021; 11(19):8978. https://doi.org/10.3390/app11198978
Chicago/Turabian StyleHuang, Haiming, Junhao Lin, Linyuan Wu, Zhenkun Wen, and Mingjie Dong. 2021. "Trigger-Based Dexterous Operation with Multimodal Sensors for Soft Robotic Hand" Applied Sciences 11, no. 19: 8978. https://doi.org/10.3390/app11198978
APA StyleHuang, H., Lin, J., Wu, L., Wen, Z., & Dong, M. (2021). Trigger-Based Dexterous Operation with Multimodal Sensors for Soft Robotic Hand. Applied Sciences, 11(19), 8978. https://doi.org/10.3390/app11198978