
Study on the Control of Torque Distribution of 4WD Corn Harvester Operation Drive

 ,
,  ,
,
Abstract
:1. Introduction
2. Design and Modeling
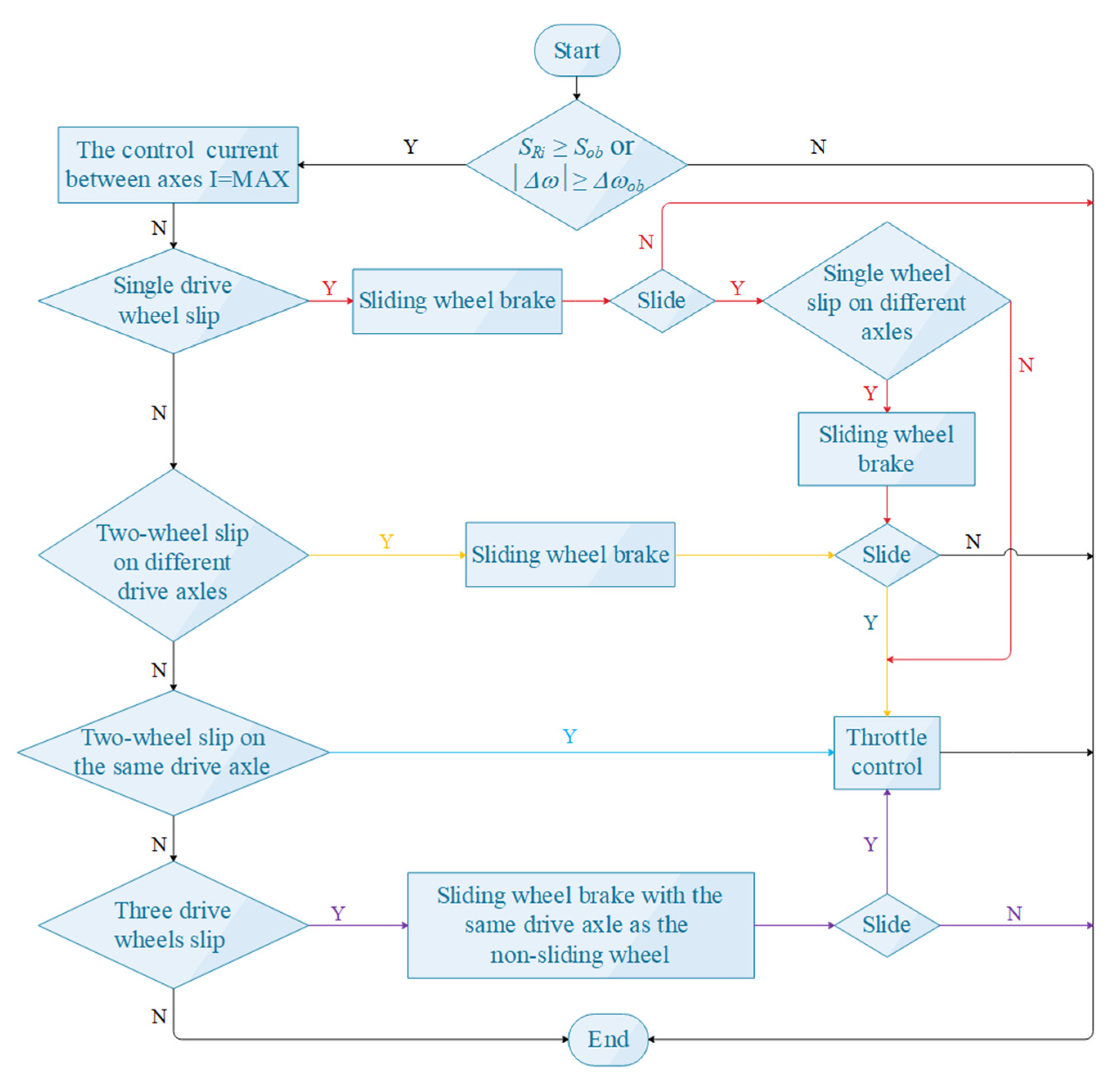
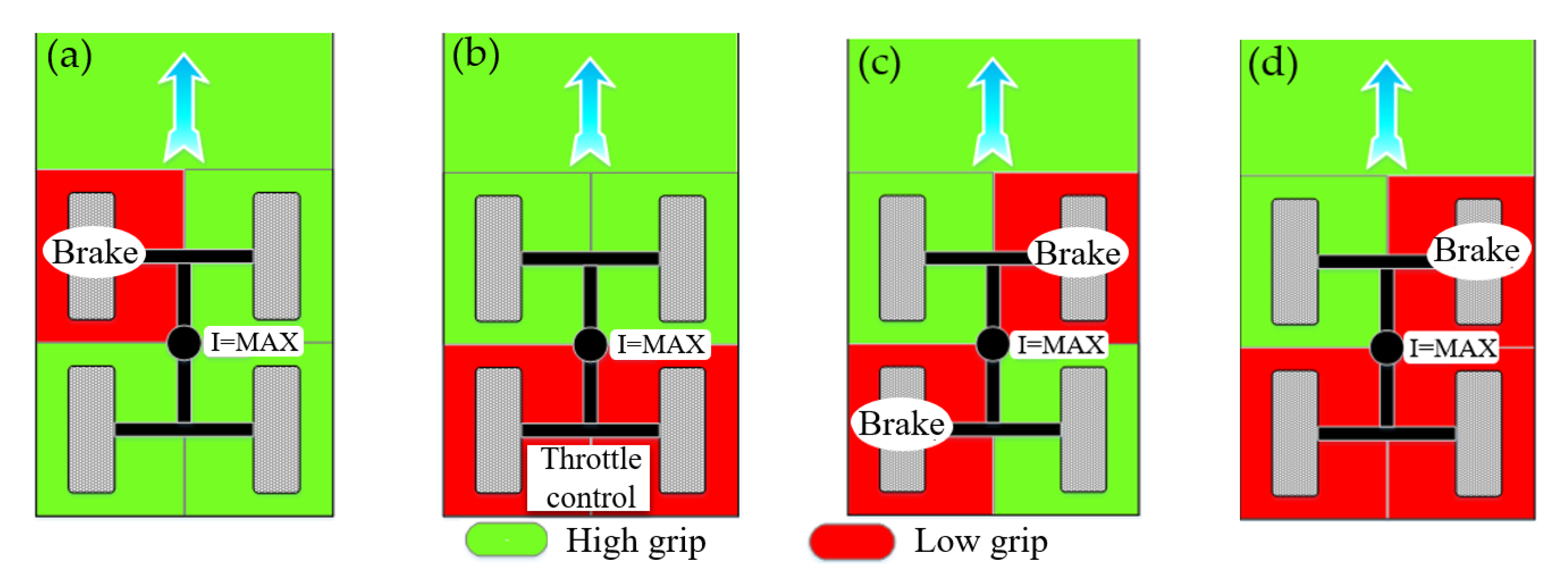
2.1. Torque Distribution Scheme and Control Principle
2.2. Establishment of the Mathematical Model
2.2.1. Mathematical Model of the Whole Machine
2.2.2. Mathematical Model of Driving Wheels
2.2.3. Mathematical Model of Inter-Axle and Inter-Wheel Torque Distribution Device
2.2.4. The Mathematical Model of Engine
2.2.5. The Mathematical Model of Brakes
3. Simulation and Result Analysis
3.1. Torque Control Strategy and Simulation Initial Conditions
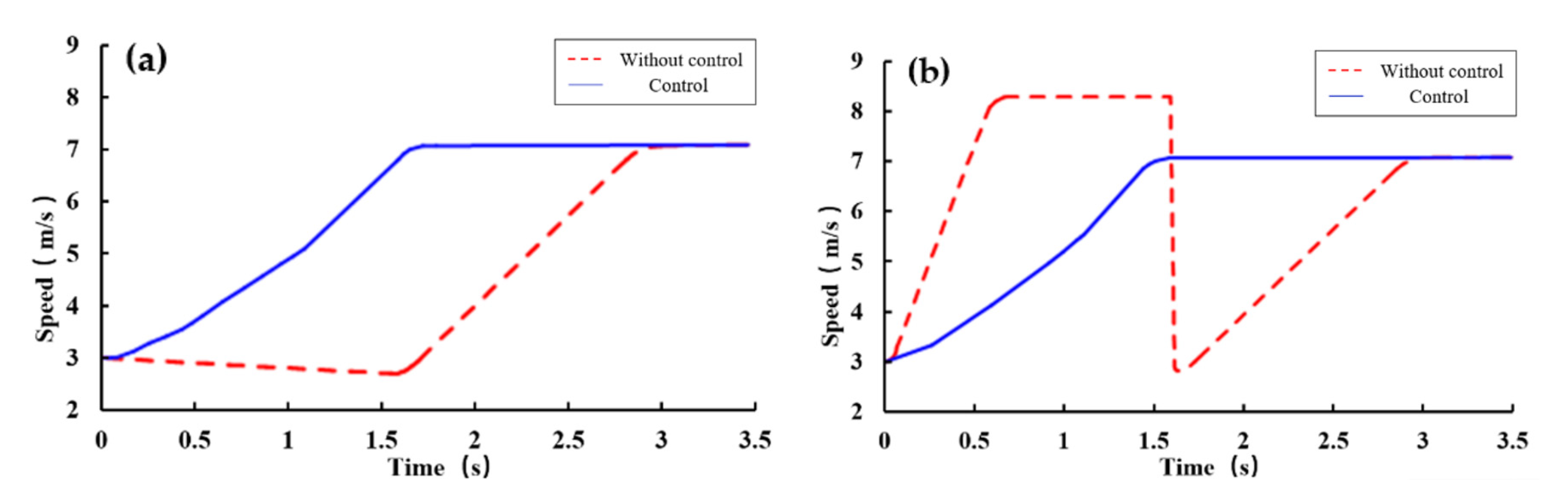
3.2. Front Left Wheel Slip Simulation
3.3. Simulation of Double Rear Wheels Slip with the Same Axle
3.4. Simulation of Two-Wheel Slip with Different Axles
3.5. Simulation When Only the Front Left Wheel Does Not Slip
3.6. Qualitative Analysis of the Traction Force
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Xu, J.; Meng, J.H.; Quackenbush, L.J. Use of remote sensing to predict the optimal harvest date of corn. Field Crop Res. 2019, 236, 1–13. [Google Scholar] [CrossRef]
- Ferraretto, L.F.; Shaver, R.D.; Luck, B.D. Silage review: Recent advances and future technologies for whole-plant and fractionated corn silage harvesting. J. Dairy Sci. 2018, 101, 3937–3951. [Google Scholar] [CrossRef] [PubMed]
- Shao, Y.E.; Dai, J.T. Integrated Feature Selection of ARIMA with computational intelligence approaches for food crop price prediction. Complexity 2018, 2018, 1–17. [Google Scholar] [CrossRef]
- Wang, Y.J.; Yang, F.Z.; Pan, G.T.; Liu, H.Y.; Liu, Z.J.; Zhang, J.Q. Design and testing of a small remote-control hillside tractor. Trans. ASABE 2014, 57, 363–370. [Google Scholar]
- Sun, C.R.; Nakashima, H.; Shimizu, H.; Miyasaka, J.; Ohdoi, K. Physics engine application to overturning dynamics analysis on banks and uniform slopes for an agricultural tractor with a rollover protective structure. Biosyst. Eng. 2019, 185, 150–190. [Google Scholar] [CrossRef] [Green Version]
- Qi, W.C.; Zhang, J.H. Dual closed-loop fuzzy PID control method for tractor body leveling in hilly areas. J. Agric. Mach. 2019, 50, 17–23, 34. [Google Scholar]
- Geng, A.J.; Zhang, M.; Zhang, J.; Zhang, Z.L.; Gao, A.; Zheng, J.L. Design and test of automatic height control system for corn harvester cutting platform. J. Agric. Mach. 2020, 51, 118–125. [Google Scholar]
- Naunhei-mer, H.; Ryborz, J.; Bertsche, B.; Song, J.J.; Gong, S.Y. Automotive Transmission Principle Selection Design and Application; Machinery Industry Press: Beijing, China, 2013. [Google Scholar]
- Janulevicius, A.; Juostas, A.; Pupinis, G. Estimation of tractor wheel slippage with different tire pressures for 4WD and 2WD wheel drive systems. In Proceedings of the Engineering for Rural Development-International Scientific Conference, Jelgava, Latvia, 22–24 May 2019; pp. 88–93. [Google Scholar]
- Piyabongkarn, D.; Lew, J.Y.; Rajamani, R.; Grogg, J.A. Active driveline torque-management systems. IEEE Control Syst. 2010, 30, 86–102. [Google Scholar]
- Chen, L.Q.; Tan, Y.D.; Wu, R.; Miao, W.; Hu, F. Torque distribution control strategy of electronically controlled four-wheel drive axle based on genetic algorithm. Soc. Agric. Mach. 2017, 48, 361–367. [Google Scholar]
- Ge, A.L.; Guo, L.S.; Zhang, T. Study of electronically controlled optimal torque distribution system for 4WD. J. Agric. Mach. 2002, 6, 16–19. [Google Scholar]
- Wong, A.; Kasinathan, D.; Khajepour, A.; Chen, S. Integrated torque vectoring and power management framework for electric vehicles. Control Eng. Pract. 2016, 48, 22–36. [Google Scholar] [CrossRef]
- De, N.L.; Sorniottia, G.P.; Gruber, P. Wheel torque distribution criteria for electric vehicles with torque-vectoring differentials. IEEE Trans. Veh. Technol. 2014, 63, 1593–1602. [Google Scholar]
- Hyeongcheol, L. Four-wheel drive control system using a clutch lesscentre limited slip differential. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2006, 220, 665–681. [Google Scholar]
- Wang, J.H.; Wang, Y.C.; Fu, T.J. Study on the effect of torque type limited slip differential on the handling stability of rear wheel drive vehicles. Automot. Eng. 2006, 28, 460–464. [Google Scholar]
- Shi, J.P.; Sun, Q.H. Theoretical Study on Determination of Torque Distribution Ratio of Splitter. Automot. Eng. 2007, 29, 889–892. [Google Scholar]
- Wheals, J.C.; Deane, M.; Drury, S.; Griffith, G.; Harman, P.; Parkinson, R.; Shepherd, S.; Turner, A. Design and Simulation of a Torque Vectoring™ Rear Axle. In Proceedings of the SAE 2006 World Congress & Exhibition, Detroit, MI, USA, 3–6 April 2006. [Google Scholar]
- Hancock, M.J.; Williams, R.A.; Gordon, T.J.; Best, M.C. A comparison of braking and differential control of road vehicle yaw-sideslip dynamics. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2005, 219, 309–327. [Google Scholar] [CrossRef] [Green Version]
- Domenico, B.; Alessandro, B.; Maria, D.; Di, B.; Di, G.; Burgio, G. Adaptive Integrated Vehicle Control using Active Front Steering and Rear Torque Vectoring. Int. J. Auto Veh. Syst. 2010, 8, 85–105. [Google Scholar]
- Jalali, M.; Hashemi, E.; Khajepour, A.; Chen, S.K.; Litkouhi, B. Integrated model predictive control and velocity estimation of electric vehicles. Mechatronics 2017, 46, 84–100. [Google Scholar] [CrossRef]
- Hayat, S.; Ahmed, S.; Tanveerul, H.; Jan, S.; Qureshi, M.; Najam, Z.; Wadud, Z. Hybrid control of PV-FC electric vehicle using Lyapunov based theory. Int. J. Adv. Comput. Sci. Appl. 2019, 10, 539–549. [Google Scholar] [CrossRef] [Green Version]
- Suzuki, R.; Ikeda, Y. Driving/braking force distribution of four wheel vehicle by quadratic programming with constraints. J. Syst. Des. Dyn. 2010, 6, 4882–4889. [Google Scholar]
- Roman, D.; Roman, D.; Yuriy, G. Power Distribution Control in the Transmission of the Perspective Wheeled Tractor with Automated Gearbox. In Proceedings of the International Scientific Conference Energy Management of Municipal Transportation Facilities and Transport EMMFT 2017, Khabarovsk, Russia, 10–13 April 2017; pp. 192–200. [Google Scholar]
- Wong, J.Y. Theory of Ground Vehicles; John Wiley & Sons: Haboken, NJ, USA, 2001. [Google Scholar]
- Wei, Y.T.; Feng, X.J.; Feng, Q.Z. Advances in Tire Dynamic Modeling Research. J. Auto Saf. Energy Conserv. 2014, 4, 311–323. [Google Scholar]
- Qiang, Q.Y.; Ying, T. A Model Predictive Controller with Longitudinal Speed Compensation for Autonomous Vehicle Path Tracking. Appl. Sci. 2019, 22, 4739. [Google Scholar]
- Gim, G.; Nikravesh, P.E. An analytical model of pneumatic tyres for vehicle dynamic simulations. Part 2: Comprehensive Slips. Int. J. Veh. Des. 1991, 12, 19–39. [Google Scholar]
- Gim, G.; Nikravesh, P.E. An analytical model of pneumatic tyres for vehicle dynamic simulations. Part 3: Validation against experimental data. Int. J. Veh. Des. 1991, 12, 217–228. [Google Scholar]
- Gim, G.; Nikravesh, P.E. An analytical model of pneumatic tyres for vehicle dynamic simulations. Part 1: Pure slips. Int. J. Veh. Des. 1990, 11, 589–618. [Google Scholar]
- Ohba, M.; Suzuka, H.; Yamamoto, T.; Takuno, H. Development of a New Electronically Controlled 4WD System: Toyota Active Torque Control 4WD. SAE Int. 1999, 108, 1326–1332. [Google Scholar]
- Hu, J.J.; Liu, H.; He, Z.B. Effect of drive force distribution control on vehicle steering driving stability. China J. Highw. Transp. 2013, 26, 183–190. [Google Scholar]
- Lv, X.L. Study on the Control of Drive Torque Distribution of 4WD Corn Harvester. Master’s Thesis, Jilin University, Jilin, China, June 2016. [Google Scholar]
- Hancock, M.J.; Williams, R.A.; Fina, E.; Best, M.C. Yaw motion control via active differentials. Trans. Inst. Meas. Control 2007, 29, 137–157. [Google Scholar] [CrossRef]
- Park, J.; Jang, I.G.; Hwang, S. Torque Distribution Algorithm for an Independently Driven Electric Vehicle Using a Fuzzy Control Method: Driving Stability and Efficiency. Energies 2018, 11, 3479. [Google Scholar] [CrossRef] [Green Version]
- Feng, N.; Zheng, M. Dynamic Performance Simulation of Power Shift Clutch During Shift. J. Beijing Inst. Technol. 2000, 19, 445–450. [Google Scholar]
- Uwe, K.; Lars, N. Automotive Control Systems: Engine, Driveline and Vehicle Control; Higher Education Press: Beijing, China, 2004. [Google Scholar]
- Yang, S.; Lee, C. Exhaust Gas Characteristics According to the Injection Conditions in Diesel and DME Engines. Appl. Sci. 2019, 9, 647. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Li, X.Y.; Li, Z.Q. Automotive Engine Dynamic Process and its Control; People’s Traffic Publishing House: Beijing, China, 2000. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Parameters | Symbol |
|---|---|---|---|
| Yaw rate | The sum of the moments of the whole machine around the z-axis | Mz | |
| Yaw angle | γ | Steering angle of steering wheel | δw |
| Yaw angular acceleration | The ground longitudinal forces on the tire | Fxw | |
| Acceleration of the whole machine along x-axis | ax | Acceleration of the whole machine along y-axis | ay |
| The ground transverse forces on the tire | Fyw | The longitudinal stiffness of the tire | Cs |
| Tire longitudinal slip rate | ss | The transverse stiffness of the tire | Ca |
| Tire transverse slip rate | sa | Normal load on harvester tire | Fz |
| Longitudinal adhesion coefficient of tire | μx | Transverse adhesion coefficient of tire | μy |
| Speed of the whole machine along the x-axis | Vx | Speed of the whole machine along the y-axis | Vy |
| The sum external force along the x-axis | Fx | The sum external force along the y-axis | Fy |
| Longitudinal force on the front left wheel | Fxwfl | Lateral force on the front left wheel | Fywfl |
| Longitudinal force on the front right wheel | Fxwfr | Lateral force on the front right wheel | Fywfr |
| Longitudinal force on the rear left wheel | Fxwrl | Lateral force on the rear left wheel | Fywrl |
| Longitudinal force on the rear right wheel | Fxwrr | Lateral force on the rear right wheel | Fywrr |
| Front left wheel rolling resistance radius | ffl | Front right wheel rolling resistance radius | ffr |
| Rear left wheel rolling resistance radius | frl | Rear right wheel rolling resistance radius | frr |
| Front left wheel-tire load | Fzfl | Front right wheel tire load | Fzfr |
| Rear left wheel-tire load | Fzrl | Rear right wheel tire load | Fzrr |
| Wind resistance coefficient of the whole machine along x-axis | Cdx | Wind resistance coefficient of the whole machine along y-axis | Cdy |
| Frontal Area of the whole machine along x-axis | Ax | Frontal Area of the whole machine along y-axis | Ay |
| Relative velocity of the whole machine and the wind along the x-axis | Vrx | Relative velocity of the whole machine and the wind along the y-axis | Vry |
| Air density | ρ | Mass | m |
| Road slope | α | Side slip angle | β |
| Yaw angular acceleration | Gravitational acceleration | g | |
| Distance between the front axle and the center of mass | a | Distance between the rear axle and the center of mass | b |
| Front-wheel track | df | Rear-wheel track | dr |
| Longitudinal distance between wind pressure center and mass of the whole machine | lx | Moment of inertia of the whole machine around z-axis | Jz |
| Front left wheel angular acceleration | Rear left wheel angular acceleration | ||
| Front right wheel angular acceleration | Rear right wheel Angular acceleration | ||
| The component of the gravity of the harvester along the slope | Fα | The central differential’s front axle angle acceleration | ωof |
| Driving force of harvester | Fj | Drive wheel tire radius | rw |
| Front left brake torque | Mbfl | Front right brake torque | Mbfr |
| Rear left brake torque | Mbrl | Rear right brake torque | Mbrr |
| Front wheel moment of inertia | jwf | Contact length of tire with ground | ln |
| Number of sun gear teeth | Zt | Number of teeth of the gear ring | Zx |
| Front axle gearbox ratio | iof | Rear axle gearbox ratio | ior |
| Front axle torque moment of inertia | jf | Rear axle torque moment of inertia | jr |
| The central differential rear axle angle acceleration | Torque distribution device input angle acceleration | ||
| The wind resistance of the whole machine along the x-axis | Fwx | The wind resistance of the whole machine along the y-axis | Fwy |
| Control torque factor | k | Clutch control torque | Tc |
| Current Working State | Judgment Condition | Corresponding Brake Control Command |
|---|---|---|
| Pressure-holding | and | Pressurization |
| and | Decompression | |
| Other | Pressure-holding | |
| Pressurization | Pressure-holding | |
| Pressurization | ||
| Decompression | Pressure-holding | |
| Decompression |
| Condition | Parameter | Value | Parameter | Value |
|---|---|---|---|---|
| Transmission system | Engine power (kw) | 110 | Rated speed (r/min) | 2200 |
| Front axle gearbox ratio: iof | 6.2 | Rear-axle gearbox ratio: ior | 6.2 | |
| Engine lag time constant: Te1 (s) | 0.01 | Engine time constant: Te2 (s) | 0.5 | |
| Friction coefficient of main clutch friction plate: | 0.25 | Friction coefficient of control clutch friction plate: | 0.25 | |
| Effective working radius of the main clutch: (mm) | 74 | Control clutch effective working radius: (mm) | 74 | |
| Reduction ratio of belt drive: iv | 2 | Front and rear axle transmission efficiency: μof | 0.95 | |
| Brakes | Brake peak pressure: Pmax (MPa) | 13 | Braking system time factor: Kt | 3.5 |
| Front brake wheel cylinder diameter: Df (mm) | 45 | Rear brake wheel cylinder diameter: Dl (mm) | 35 | |
| Wheels | Drive wheel rolling radius (m) | 0.6 | Tire section width (mm) | 315 |
| Whole machine | Harvester quality (kg) | 4600 | Front and rear wheelbase (mm) | 3000 |
| Moment of inertia of the whole machine around z-axis: Jz (kg·m2) | 7360 | Distance of the mass center from the front axis: a (mm) | 1220 | |
| Front axle wheelbase (mm) | 1600 | Rear-axle wheelbase (mm) | 1600 | |
| Road state | Field adhesion coefficient: μt | 0.6 | Coefficient of rolling resistance in field: fR | 0.1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, D.; Hou, P.; Xin, Y.; Lv, X.; Wu, B.; Yu, H.; Zhang, J.; Zhang, Q. Study on the Control of Torque Distribution of 4WD Corn Harvester Operation Drive. Appl. Sci. 2021, 11, 9152. https://doi.org/10.3390/app11199152
Zhou D, Hou P, Xin Y, Lv X, Wu B, Yu H, Zhang J, Zhang Q. Study on the Control of Torque Distribution of 4WD Corn Harvester Operation Drive. Applied Sciences. 2021; 11(19):9152. https://doi.org/10.3390/app11199152
Chicago/Turabian StyleZhou, Deyi, Pengfei Hou, Yuelin Xin, Xinlei Lv, Baoguang Wu, Haiye Yu, Jinsong Zhang, and Qiang Zhang. 2021. "Study on the Control of Torque Distribution of 4WD Corn Harvester Operation Drive" Applied Sciences 11, no. 19: 9152. https://doi.org/10.3390/app11199152
APA StyleZhou, D., Hou, P., Xin, Y., Lv, X., Wu, B., Yu, H., Zhang, J., & Zhang, Q. (2021). Study on the Control of Torque Distribution of 4WD Corn Harvester Operation Drive. Applied Sciences, 11(19), 9152. https://doi.org/10.3390/app11199152