
Development of an Intelligent Voltage Control System for Bulk Power Systems



Abstract
:1. Introduction
2. Intelligent Voltage Control System
2.1. Sensitivity Matrices for Reactive Power Devices
2.2. Knowledge Base of the Expert System
- Open/closed status of transmission lines.
- Upper and lower limits of each bus voltage.
- Installed capacity of each reactive power compensation device.
- Current usable capacity of each reactive power compensation device.
- Dynamic data from SCADA or any other monitoring system.
- Values of the sensitivity matrices, which are functions of each bus voltage and tap position, calculated from the numerical subsystem at the request of the inference engine.
- Load bus voltage profile calculated from the load flow.
- Rules to compare the current voltages with their specified limits and to find the buses with voltage violations.
- Rules to check the voltage violation according to the following criteria:
- ○
- * Normal voltage (p.u.): 0.95 ≤ V ≤ 1.05
- ○
- * Abnormal voltage (p.u.): V < 0.95 or V > 1.05
- Like many other countries, a ±5% variation is allowed in 765 and 345 kV high-voltage transmission networks in Korea. These limits can be changed using input data for general purposes.
- Rules to establish the sensitivity tree for each abnormal bus voltage find the most effective (highest weighted sensitivity) control in the bus with the worst voltage violation, and calculate the controls needed to remove the voltage violation.
- Rules to check the operation of the controller considering its constraints. If the controls exceed the limits, then the control value is fixed to the control limit.
- The criteria of the generator terminal voltage: upper and lower limits of the generator terminal voltage (p.u.).
- Transformer tap and shunt capacitors or reactors operated in the range of control limits.
- According to the selected control actions, voltage variations at each bus are estimated using the sensitivity tree, and the bus voltages recalculated by the load flow are refreshed under the appropriate control actions.
- The above procedures are repeated for each load bus in the overall system until all bus voltages satisfy their own limits.
2.3. State-Space Modeling of the Voltage Control Problem
2.4. Least-Cost Search
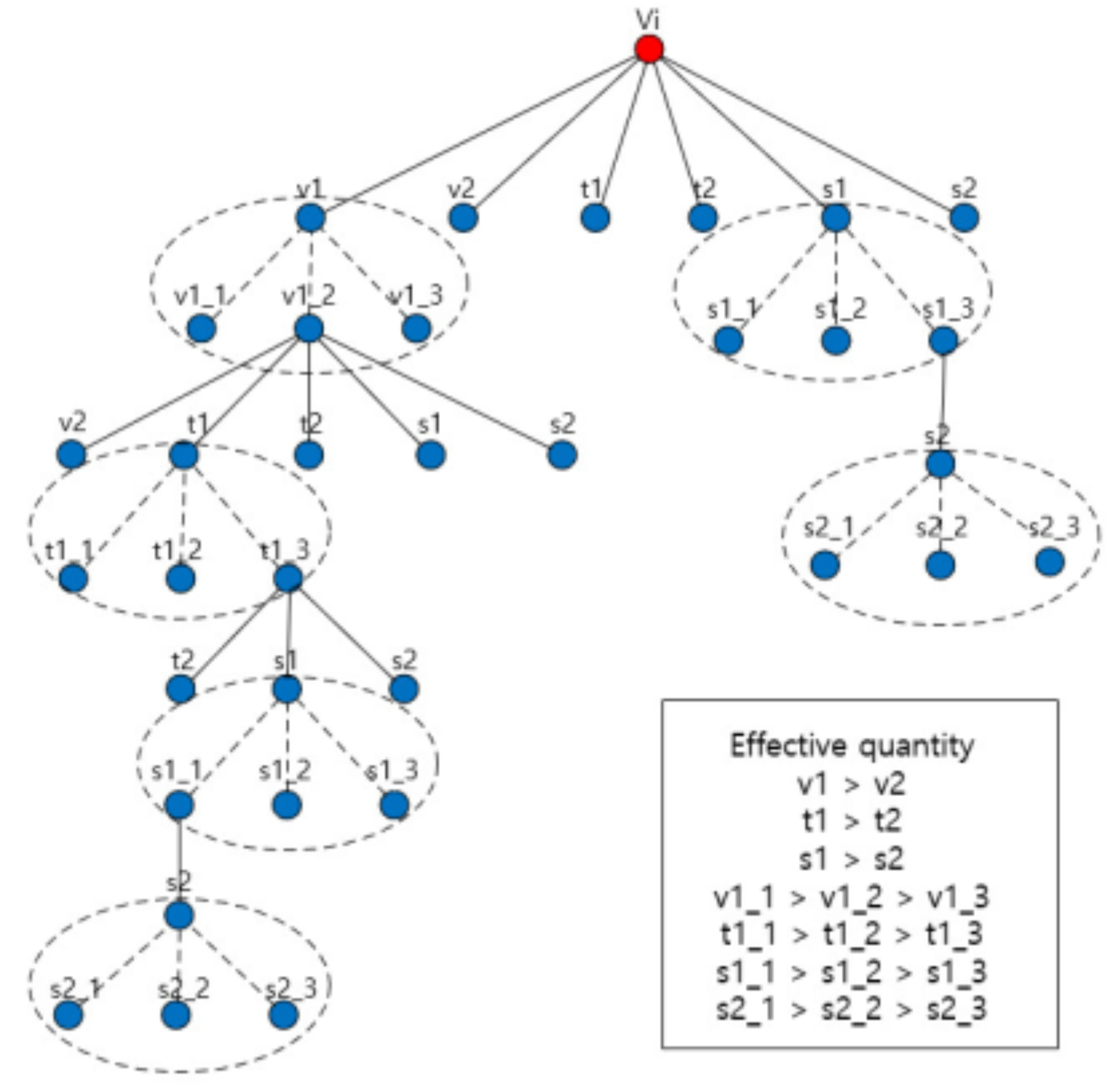
- Step 1: Regarding a bus with abnormal bus voltage, a v1 node that has the largest effect quantity (sensitivity value control quantity) is selected by the system. Then, the system expands the v1 node as a three quantized effect quantity. Using the three quantized effect quantity, the system calculates the liner prediction and weighted evaluation function of all bus voltages. The evaluation function quantities of expanded nodes are 11, 9, and 10, as seen Figure 4. The system selects the v1_2 node with the smallest evaluation function value and progresses to select a compensation device in step 2.
- Step 2: The system performs a liner prediction by using the effect quantity of v2. As a result, the system selects transformer tap t1 because abnormal bus voltage occurred in the normal bus. Then, through a process similar to that of v1, the system selects the t1_3 node with the smallest evaluation function quantity. Finally, if the abnormal bus voltage is dissolved, the system selects a compensation device in step 3. Conversely, if the abnormal bus voltage is solved, the system finishes the search process.
2.5. Overall Inference Process
3. Case Study
3.1. Structure of Korea’s Power System
3.2. Case Study
3.3. Error Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jin, L.; Kumar, R.; Elia, N. Model predictive control-based real-time power system protection schemes. IEEE Trans. Power Syst. 2009, 25, 988–998. [Google Scholar] [CrossRef]
- Negenborn, R.; Beccuti, A.; Demiray, T.; Leirens, S.; Damm, G.; De Schutter, B.; Morari, M. Supervisory hybrid model predictive control for voltage stability of power networks. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007; pp. 5444–5449. [Google Scholar] [CrossRef] [Green Version]
- Paul, J.P.; Leost, J.Y.; Tesseron, J.M. Survey of the secondary voltage control in France: Present realization and investigations. IEEE Trans. Power Syst. 1987, 2, 505–511. [Google Scholar] [CrossRef]
- Lefebvre, H.; Fragnier, D.; Boussion, J.; Mallet, P.; Bulot, M. Secondary coordinated voltage control system: Feedback of EDF. In Proceedings of the 2000 Power Engineering Society Summer Meeting, Seattle, WA, USA, 16–20 July 2002. [Google Scholar] [CrossRef]
- Corsi, S.; Pozzi, M.; Sabelli, C.; Serrani, A. The coordinated automatic voltage control of the Italian transmission grid—Part I: Reasons of the choice and overview of the consolidated hierarchical system. IEEE Trans. Power Syst. 2004, 19, 1723–1732. [Google Scholar] [CrossRef]
- Frias, P.; Gomez, T.; Soler, D. Voltage control and reactive power support in the Spanish transmission network. In Proceedings of the MELECON 2006—2006 IEEE Mediterranean Electrotechnical Conference, Malaga, Spain, 16–19 May 2006. [Google Scholar] [CrossRef]
- Cheng, S.; Malik, O.; Hope, G. An expert system for voltage and reactive power control of a power system. IEEE Trans. Power Syst. 1988, 3, 1449–1455. [Google Scholar] [CrossRef]
- Sancha, J.L.; Fernandez, J.L.; Martinez, F.; Salle, C. Spanish practices in reactive power management and voltage control. In Proceedings of the IEEE Colloquium on International Practices in Reactive Power Control IET, London, UK, 7 April 1993. [Google Scholar]
- Gómez, E.; Ramos, M.J.L.; Macias, R.J.L.; Salinas, C.Y. Sensitivity-based reactive power control for voltage profile improvement. IEEE Trans. Power Syst. 1993, 8, 937–945. [Google Scholar] [CrossRef]
- Ramos, J.L.M.; Exposito, A.; Cerezo, J.; Ruiz, E.; Salinas, F. A hybrid tool to assist the operator in reactive power/voltage control and optimization. IEEE Trans. Power Syst. 1995, 10, 760–768. [Google Scholar] [CrossRef]
- Belhadj, C.; Mohamedi, R.; Lefebvre, S.; Do, X.-D. An integrated power system global controller using expert system. In Proceedings of the 1996 Canadian Conference on Electrical and Computer Engineering, Calgary, AB, Canada, 26–29 May 1996; pp. 446–449. [Google Scholar]
- Le, T.L.; Negnevitsky, M.; Piekutowski, M. Network equivalents and expert system application for voltage and VAR control in large-scale power systems. IEEE Trans. Power Syst. 1997, 12, 1440–1445. [Google Scholar] [CrossRef]
- Seo, S.-S.; Choi, Y.-H.; Kang, S.-G.; Lee, B.-J.; Shin, J.-H.; Kim, T.-K. Hybrid control system for managing voltage and reactive power in the JEJU power system. J. Electr. Eng. Technol. 2009, 4, 429–437. [Google Scholar] [CrossRef]
- Choi, Y.-H.; Cho, Y.-S. Multiple-point voltage control to minimize interaction effects in power systems. Energies 2019, 12, 274. [Google Scholar] [CrossRef] [Green Version]
- Lee, H.J.; Yu, W.K.; Lim, C.H.; Lee, E.J.; Kim, G.D.; Kim, T.K.; Shin, J.H.; Nam, S.C.; Kang, Y.C. A study on the optimal search method of the hybrid intelligent voltage/reactive power control system. In Proceedings of the 2009 Transmission & Distribution Conference & Exposition: Asia and Pacific, Seoul, Korea, 26–30 October; 2009; pp. 1–4. [Google Scholar] [CrossRef]
- Lee, H.; Yu, W.; Wang, I.; Kang, H.; Shin, J. A study on the intelligent voltage control system. Trans. Korean Inst. Electr. Eng. 2012, 61, 944–949. [Google Scholar] [CrossRef] [Green Version]
- Yu, W.; Lee, H.; Kim, C.; Park, J.; Lee, K. A study on the Korea mainland power system application of intelligent voltage control system. In Proceedings of the International Smart Grid Conference, Gwangju, Korea, 12–14 October 2015. [Google Scholar]
- Lee, H.; Yu, W.; Oh, J. On the sensitivity matrix for reactive power control devices. Trans. Korean Inst. Electr. Eng. 2021, 70. submitted. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Upper Limit (p.u.) | Lower Limit (p.u.) | |
|---|---|---|
| Regulation voltage | 1.05 | 0.95 |
| Generator terminal voltage range | 1.05 | 0.95 |
| Generator voltage quantization | 5 | |
| Control equipment priority | Generator voltage > Shunt capacitor/reactor > Tap | |
| Bus Number | Steady State | After Fault | After Control |
|---|---|---|---|
| 1020 | 0.9899 | 0.9356 | 0.9616 |
| 1525 | 0.9942 | 0.9491 | 0.9781 |
| 1545 | 0.9850 | 0.9404 | 0.9697 |
| 1565 | 0.9865 | 0.9426 | 0.9724 |
| 1575 | 0.9828 | 0.9406 | 0.9704 |
| 1585 | 0.9836 | 0.9409 | 0.9711 |
| 1590 | 0.9791 | 0.9342 | 0.9641 |
| 1595 | 0.9829 | 0.9438 | 0.9730 |
| 1630 | 0.9936 | 0.9485 | 0.9775 |
| 1720 | 1.0006 | 0.9484 | 0.9771 |
| 1740 | 0.9985 | 0.9461 | 0.9750 |
| 1746 | 0.9976 | 0.9451 | 0.9741 |
| 1770 | 0.9976 | 0.9435 | 0.9734 |
| 1786 | 0.9977 | 0.9436 | 0.9735 |
| 1790 | 0.9975 | 0.9434 | 0.9732 |
| 1985 | 0.9983 | 0.9458 | 0.9747 |
| Event Number | Equipment Number | Control Action (p.u.) |
|---|---|---|
| 1 | V_21822X1 | 1.05 |
| 2 | V_21925X1 | 1.05 |
| 3 | V_25441X1 | 1.05 |
| 4 | V_25152X1 | 1.05 |
| 5 | V_25151X1 | 1.05 |
| 6 | V_25154X1 | 1.05 |
| 7 | V_25153X1 | 1.05 |
| 8 | V_23252X1 | 1.05 |
| 9 | V_25152X1 | 0.95 |
| Bus Number | PSS/E | Linear Prediction | |
|---|---|---|---|
| 1020 | 0.9616 | 0.9636 | 0.2080 |
| 1525 | 0.9781 | 0.9846 | 0.6688 |
| 1545 | 0.9697 | 0.9769 | 0.7497 |
| 1565 | 0.9724 | 0.9804 | 0.8308 |
| 1575 | 0.9704 | 0.9783 | 0.8232 |
| 1585 | 0.9711 | 0.9798 | 0.8987 |
| 1590 | 0.9641 | 0.9721 | 0.8322 |
| 1595 | 0.9730 | 0.9800 | 0.7295 |
| 1630 | 0.9775 | 0.9840 | 0.6706 |
| 1720 | 0.9771 | 0.9826 | 0.5696 |
| 1740 | 0.9750 | 0.9805 | 0.5658 |
| 1746 | 0.9741 | 0.9796 | 0.5682 |
| 1770 | 0.9734 | 0.9799 | 0.6746 |
| 1786 | 0.9735 | 0.9800 | 0.6725 |
| 1790 | 0.9732 | 0.9798 | 0.6854 |
| 1985 | 0.9747 | 0.9802 | 0.5734 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.; Yu, W.; Oh, J.; Kim, H.; Kim, J. Development of an Intelligent Voltage Control System for Bulk Power Systems. Appl. Sci. 2021, 11, 9233. https://doi.org/10.3390/app11199233
Lee H, Yu W, Oh J, Kim H, Kim J. Development of an Intelligent Voltage Control System for Bulk Power Systems. Applied Sciences. 2021; 11(19):9233. https://doi.org/10.3390/app11199233
Chicago/Turabian StyleLee, Heungjae, Wonkun Yu, Junghyun Oh, Hyungsuk Kim, and Jinyoung Kim. 2021. "Development of an Intelligent Voltage Control System for Bulk Power Systems" Applied Sciences 11, no. 19: 9233. https://doi.org/10.3390/app11199233